§
IE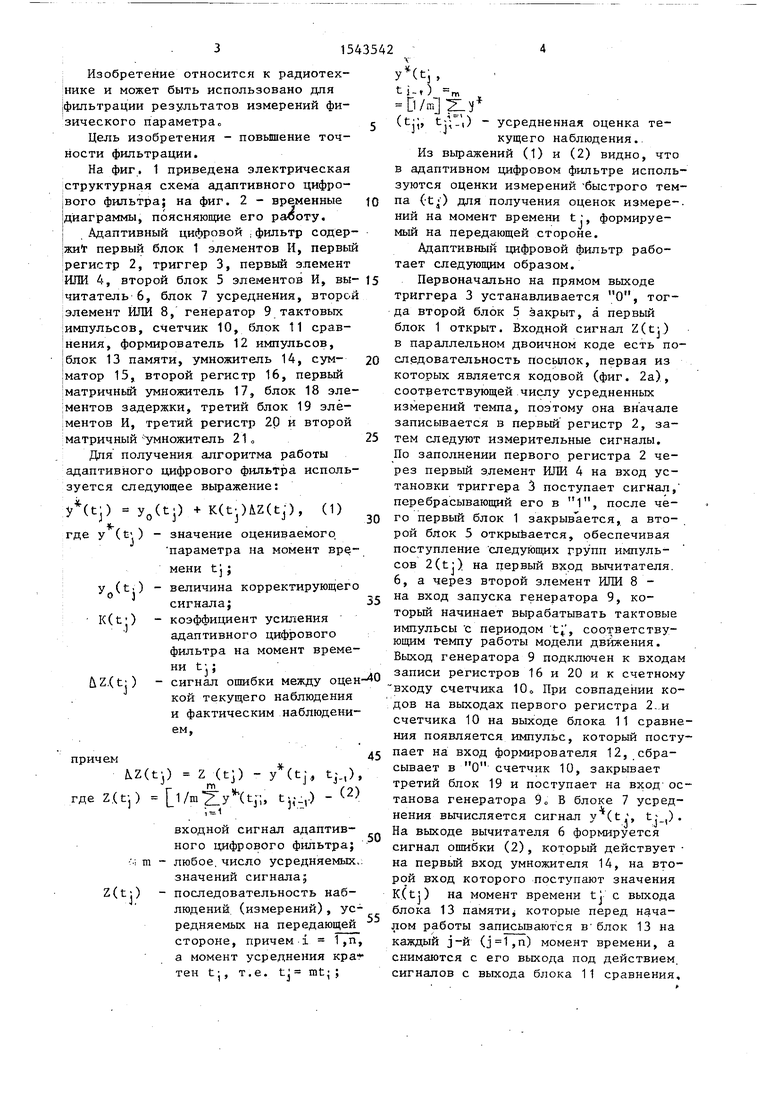
| название | год | авторы | номер документа |
|---|---|---|---|
| Модифицированный фильтр Калмана | 1986 |
|
SU1434539A1 |
| МОДИФИЦИРОВАННЫЙ ФИЛЬТР КАЛМАНА | 1992 |
|
RU2160496C2 |
| Адаптивный фильтр Калмана | 1990 |
|
SU1800588A1 |
| Устройство для фильтрации симметричных составляющих | 1985 |
|
SU1343362A1 |
| Способ адаптивной временной дискретизации и устройство для его осуществления | 1983 |
|
SU1095390A1 |
| Устройство для передачи информации со сжатием | 1983 |
|
SU1091206A1 |
| Устройство для разделения направлений передачи в дуплексных системах связи | 1986 |
|
SU1332542A2 |
| Частотный анализатор | 1990 |
|
SU1798630A1 |
| Адаптивный аналого-цифровой фильтр | 1977 |
|
SU714408A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
Изобретение относится к радиотехнике. Цель изобретения - повышение точности фильтрации. Фильтр содержит блоки элементов И 1,5 и 19, регистры 2, 16 и 20, триггер 3, элементы ИЛИ 4 и 8, вычитатель 6, блок усреднения 7, генератор 9 тактовых импульсов, счетчик 10, блок сравнения 11, формирователь 12 импульсов, блок памяти 13, умножитель 14, сумматор 15, матричные умножители 17 и 21 и блок элементов задержки 18. В данном фильтре используются оценки измерений быстрого темпа для получения оценок измерений на момент времени, формируемый на передающей стороне. Цель изобретения достигается путем обеспечения получения оценок измерений при более медленном темпе их поступления. 2 ил.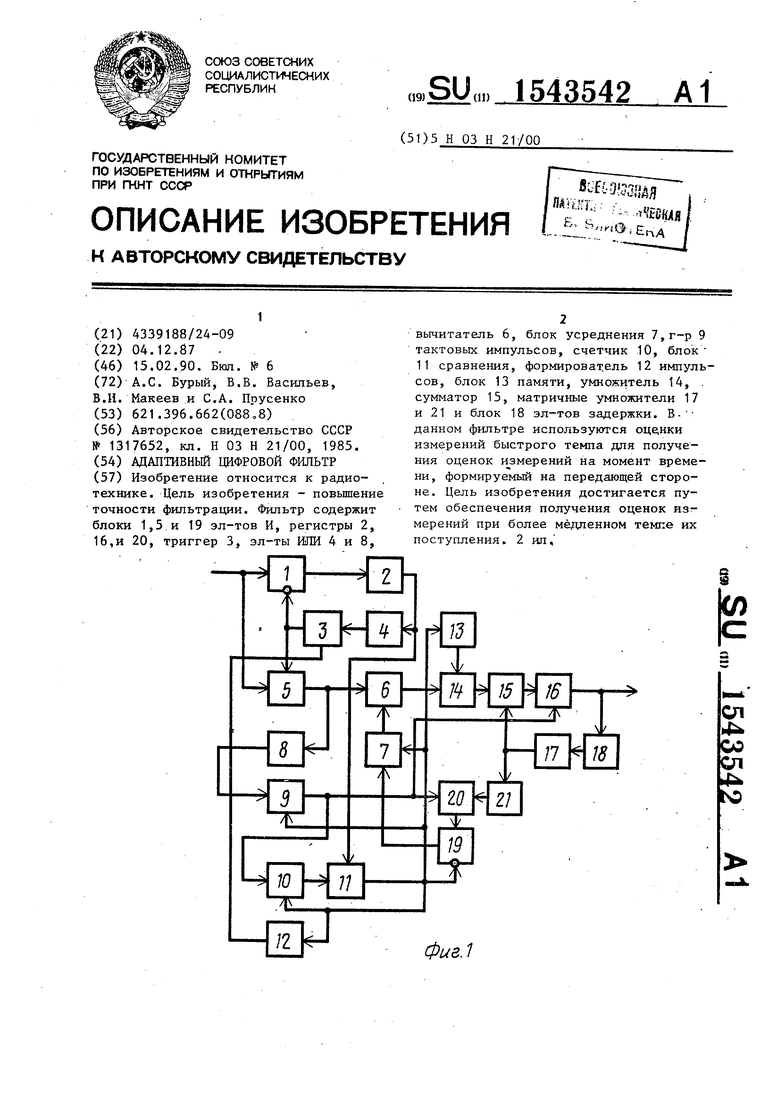
СП
4 СО
сл
i
3154
Изобретение относится к радиотехнике и может быть использовано для фильтрации результатов измерений физического параметра,,
Цель изобретения - повышение точности фильтрации.
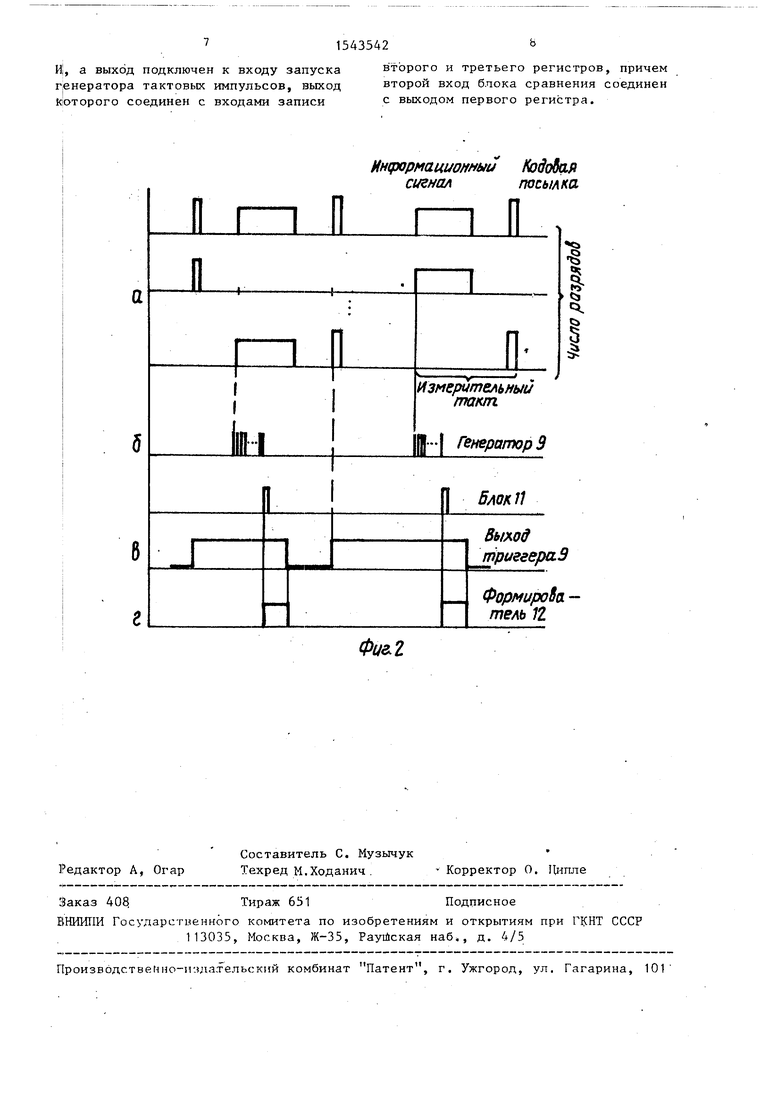
На фиг. 1 приведена электрическая структурная схема адаптивного цифрового фильтра; на фиг. 2 - временные Диаграммы, поясняющие его работу. Адаптивный цифровой фильтр содержи первый блок 1 элементов И, первый регистр 2, триггер 3, первый элемент ИЛИ 4, второй блок 5 элементов И, вы- читатель 6, блок 7 усреднения, второй элемент ИЛИ 8, генератор 9 тактовых импульсов, счетчик 10, блок 11 сравнения, формирователь 12 импульсов, блок 13 памяти, умножитель 14, сумматор 15, второй регистр 16, первый матричный умножитель 17, блок 18 элементов задержки, третий блок 19 элементов И, третий регистр 20 и второй матричный умножитель 21„
Для получения алгоритма работы адаптивного цифрового фильтра используется следующее выражение:
y(tj) y0(tj) + K(t-Hz(tj), (1)
где у (t1 ) - значение оцениваемого
параметра на момент вр$мени ti
w
величина корректирующего сигнала;35
K(f) - коэффициент усиления адаптивного цифрового фильтра на момент времени t
30 го первый блок 1 закрывается, а второй блок 5 открывается, обеспечивая поступление следующих групп импульсов 2(t:) на первый вход вычитателя 6, а через второй элемент ИЛИ 8 - на вход запуска генератора 9, который начинает вырабатывать тактовые
импульсы с периодом , соответствующим темпу работы модели движения. Выход генератора 9 подключен к входам
UZ(tj)
записи регистров 16 и 20 и к счетному
сигнал ошибки между оцен-40 .входу счетчика 1Qo совпадении ко- кой текущего наблюдения и фактическим наблюденидов на выходах первого регистра 2 и счетчика 10 на выходе блока 11 сравне ния появляется импульс, который посту- 45 пает на вход формирователя 12, сбрасывает в О счетчик 10, закрывает третий блок 19 и поступает на вход останова генератора 9 В блоке 7 усреднения вычисляется сигнал у (t , t- ). На выходе вычитателя 6 формируется сигнал ошибки (2), который действует на первый вход умножителя 14, на второй вход которого поступают значения K(tj) на момент времени tj с выхода блока 13 памяти, которые перед началом работы записываются в блок 13 на каждый j-й (,n) момент времени, а снимаются с его выхода под действием сигналов с выхода блока 11 сравнения.
ем,
ем
&Z(tp Z (tj) - у (tj, tj.,),
Z(tj) , t.,) - (2)
входной сигнал адаптивного цифрового фильтра; i m - любое число усредняемых, значений сигнала; последовательность наблюдений (измерений), усредняемых на передающей стороне, причем г - 1 ,п, а момент усреднения кра
z(tp
тен
t;, т.е. Lj mt; ;
5
те5
y(t,,
.
(tjj, ,) - усредненная оценка кущего наблюдения. Из выражений (1) и (2) видно, что в адаптивном цифровом фильтре используются оценки измерений быстрого темпа (tp для получения оценок измерений на момент времени t:, формируемый на передающей стороне.
Адаптивный цифровой фильтр работает следующим образом.
Первоначально на прямом выходе триггера 3 устанавливается О, тогда второй блок 5 закрыт, а первый блок 1 открыт. Входной сигнал Z(t) в параллельном двоичном коде есть по0 следовательность посылок, первая из которых является кодовой (фиг. 2а), соответствующей числу усредненных измерений темпа, поэтому она вначале записывается в первый регистр 2, за5 тем следуют измерительные сигналы. По заполнении первого регистра 2 через первый элемент ИЛИ 4 на вход установки триггера 3 поступает сигнал, перебрасывающий его в 1, после че0 го первый блок 1 закрывается, а второй блок 5 открывается, обеспечивая поступление следующих групп импульсов 2(t:) на первый вход вычитателя 6, а через второй элемент ИЛИ 8 - на вход запуска генератора 9, который начинает вырабатывать тактовые
импульсы с периодом , соответствующим темпу работы модели движения. Выход генератора 9 подключен к входам
.входу счетчика 1Qo совпадении ко-
дов на выходах первого регистра 2 и счетчика 10 на выходе блока 11 сравнения появляется импульс, который посту- пает на вход формирователя 12, сбрасывает в О счетчик 10, закрывает третий блок 19 и поступает на вход останова генератора 9 В блоке 7 усреднения вычисляется сигнал у (t , t- ). На выходе вычитателя 6 формируется сигнал ошибки (2), который действует на первый вход умножителя 14, на второй вход которого поступают значения K(tj) на момент времени tj с выхода блока 13 памяти, которые перед началом работы записываются в блок 13 на каждый j-й (,n) момент времени, а снимаются с его выхода под действием сигналов с выхода блока 11 сравнения.
л. (, - v - I f
HPCt}, tj.,) N- (tj)
поступающих на управляющий вход блока 13. K(tj) определяются из выражений
K(t)) 6(tpH(tj)N 1(t));
0.(t)fP(tj, tb)e(tj )PT(t , t j.,)(tj)N- (tj)H(tj)jJ (3)
где H(tj)
Л соответственно матрицы измерений и пе-. реходная размером пхг и (гхгД индексы Т и -1 означают операцию транспонирования и обращения матрицы;
ковариационная матрица шумов измерений. С выхода умножителя 14 сигнал поступает на второй вход сумматора 15, на первый вход которого подается сиг- нал y0(t;) P(t;, tf, )y (t ;, ), который снимается с выхода первого матричного умножителя 17, на вход которого поступает предыдущее значение оценки y(t ;, ) на (момент времени t ;, , для чего используется блок 18 . элементов задержки, осуществляющий задержку на один такт. С выхода сумматора 15 сигнал поступает на вход второго регистра 16 памяти . С выхода второго регистра 16 памяти сигнал поступает на вход блока 18 элементов задержки. С выхода первого матричного умножителя 17 сигнал поступает на вход второго матричного умножителя 21 С выхода второго матричного умножителя 21 сигнал действует на вход третьего регистра 20, с выхода которого информация снимается в момент прихода тактовых импульсов с выхода генератора 9, и поступает на первый вход третьего блока 19, на второй вход которого действует управляющий импульс с выхода блока 11 сравнения. Третий блок 19 запирается на продолжительность усреднения (в аппаратурном смысле). С выхода второго регистра 16 снимается оценка y(t;), которая при i m соответствует t:.
Таким образом, предлагаемый адаптивный цифровой фильтр обеспечивает получение оценок измерений при более медленном темпе их поступления о Изобретение обеспечивает расширение функциональных возможностей устройства за счет реализации возможности работы
0
0
5
с усредненной входной информацией, . что приводит к значительной разгрузке канала связи
Формула изобретения
Адаптивный цифровой фильтр, содержащий вычитатель, умножитель, сумматор, первый матричный умножитель, выходы которого соединены с первыми входами сумматора, второй матричный , умножитель и блок сравнения, отличающийся тем, что, с це- g лью, повышения точности фильтрации, введены последовательно соединенные первый блок элементов И, первый регистр, первый элемент ИЛИ и триггер, выход которого соединен с первыми входами первого блока элементов И, вторые входы которого являются входом адаптивного цифрового фильтра, второй регистр, блок элементов задержки, второй блок элементов И, первые входы которого соединены с вто- рыми входами первого блока элементов И, а выходы соединены через последовательно соединенные вычитатель и умножитель с вторым входом сумматора, выход которого подключен к входам второго регистра, выходы которого являются выходом адаптивного цифрового фильтра и соединены.черэз блок элементов задержки с входами- первого матричного умножителя, выходы которого подключены к входам второго матричного умножителя, последовательно соединенные третий регистр, входы которого соединены с выходами второго матричного умножителя, третий блок элементов И и блок усреднения, выход которого соединен с вторым входом вы- читателя, формирователь импульсов,
выход которого соединен с входом сбро- i с са триггера, выход которого соединен
с вторыми входами второго блока элементов И, блок памяти, выход которого еоединен с вторым входом умножителя, последовательно соединенные генератор тактовых импульсов и счетчик, выход которого соединен через блок срав- нения с входом формирователя импульсов, вторыми входами третьего блока элементов И, управляющими входами бло- с ков памяти и усреднения, входом останова генератора тактовых импульсов и входом сброса счетчика, и второй элемент ИЛИ, вход которого соединен с выходами второго блока элементов
0
5
0
0
И, а выход подключен к входу запуска генератора тактовых импульсов, выход которого соединен с входами записи
второго и третьего регистров, причем второй вход бпока сравнения соединен с выходом первого регистра.
Информационный Кодовая сигналпосылка
| Регуляризованный фильтр Калмана | 1985 |
|
SU1317652A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
