Изобретение относится к надземному пассажирскому транспорту и касается осуществления скоростных, преимущественно городских и пригородных, монорельсовых транспортных систем навесного типа.
На пассажира транспортного средства в составе монорельсовой транспортной системы навесного типа при движении по криволинейным участкам пути, в процессе разгона и торможения в районах станций, при торможении в чрезвычайной ситуации, а также при спуске на нисходящем участке пути или при подъеме на восходящем участке действуют в поперечном направлении инерционные силы или поперечная составляющая от его собственного веса. Пассажир, в результате действия поперечных сил на него, испытывает постоянное напряжение мышц тела для удержания равновесия при нахождении в салоне транспортного средства. Для сохранения равновесия он страхуется, удерживаясь за поручень или отклоняя туловище на угол, который позволил бы ему уравновесить поперечные силы. Все эти обстоятельства особенно актуальны для пригородных и городских транспортных систем, так как для коротких перегонов число сидячих мест ограничено, а для стоящих пассажиров перечисленные воздействия поперечных сил на них особенно неприятны. Кроме этого, не каждый пассажир может адекватно отреагировать на воздействие поперечных сил, особенно пассажир пенсионного возраста, что как известно может привести к конфликтным ситуациям в салоне транспортного средства (один пассажир толкнул другого). Все это создает дискомфорт для пассажиров транспортного средства.
Известен способ компенсации центробежных сил, действующих на пассажиров при поворотах рельсового транспортного средства, предусматривающий на криволинейных участках соответствующий наклон путевого полотна (см., например, Каменский В. Б. и др. Содержание железнодорожного пути в кривых, М., "Транспорт", 1987, С.9-16).
Однако, известный способ характеризуется низкой эффективностью. Кроме того, его практическое осуществление сопряжено со значительными материальными затратами.
Известен также способ уравновешивания инерционных сил, действующих на пассажиров рельсового транспортного средства, согласно которому с возникновением в процессе движения транспортного средства инерционных сил, вызывающих отклонение туловища пассажира к боковым стенкам кузова транспортного средства, вращают кузов вокруг оси, параллельной вектору его линейной скорости (ЕР 0189382 A2, В 61 F 5/22, 30.07.86; DE 4343998 A1, В 61 F 5/22, 20.07.95; DE 4112879 A1, В 60 G 17/00, 29.10.92; ЕР 0647553 A3, В 61 F 5/22, 12.04.95 - прототип).
Известны рельсовые транспортные системы, содержащие транспортную балку и установленное на ней транспортное средство, состоящее из ходовой рамы, кузова, шарнирно закрепленного на ходовой раме, и устройство вращения кузова вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова (ЕР 0189382 A2, В 61 F 5/22, 30.07.86; DE 4343998 A1, В 61 F 5/2, 20.07.95; DE 4112879 A1, В 60 G 17/00, 29.10.92; ЕР 0647553 A3, В 61 F 5/22, 12.04.95 - прототип).
Недостаток указанных технических решений связан с невозможностью отработки инерционных сил при движении транспортного средства по наклонному участку транспортной балки, а также при ускорении или замедлении в продольном направлении движения.
Задачей предложенного изобретения является обеспечение эффективной компенсации инерционных сил, в том числе вызывающих отклонение туловища пассажира к передней или задней стенкам кузова транспортного средства.
В части способа поставленная задача решается тем, что для уравновешивания инерционных сил, действующих на пассажиров транспортного средства в монорельсовой транспортной системе навесного типа, возникающих в процессе движения транспортного средства инерционных сил и вызывающих отклонение туловища пассажира к передней, задней или боковым стенкам кузова транспортного средства, вращают кузов вокруг оси, параллельной вектору его линейной скорости, и/или оси, параллельной нормали к вектору линейной скорости, при этом расположение указанных осей принимают между транспортной балкой и центром масс кузова.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Кузов транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, при движении транспортного средства по криволинейному участку транспортной балки, при этом крышу кузова смещают по направлению к центру кривизны криволинейного участка транспортной балки.
Кузов транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при движении транспортного средства по наклонному участку транспортной балки, при этом в случае движения по нисходящему участку транспортной балки от транспортной балки удаляют передний по ходу движения торец кузова, а в случае движения по восходящему участку транспортной балки - задний торец кузова.
Кузов транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при ускоренном или замедленном в продольном направлении движении транспортного средства, при этом в случае замедления движения от транспортной балки удаляют передний по ходу движения торец кузова, а в случае ускорения движения - задний торец кузова.
Кузов транспортного средства вращают одновременно вокруг оси, параллельной вектору линейной скорости транспортного средства, и оси, параллельной нормали к вектору линейной скорости транспортного средства, при движении транспортного средства одновременно по криволинейному и наклонному участкам транспортной балки, при этом при вращении вокруг первой из указанных осей крышу кузова смещают по направлению к центру кривизны криволинейного участка транспортной балки, а при вращении вокруг второй оси на нисходящем и восходящем участках от транспортной балки удаляют соответственно передний и задний по ходу движения торцы кузова.
Кузов транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, в пределах 0°...αk, где αk = arctg(V2/gR), V - линейная скорость транспортного средства, R - радиус кривизны криволинейного участка транспортной балки, g - ускорение свободного падения.
Кузов транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, в пределах 0°...βk, где βk′- угол наклона транспортной балки.
Кузов транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, в пределах 0°...χk, где χk = arctg(a/g), a - линейное ускорение транспортного средства, g - ускорение свободного падения.
Кузов транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке криволинейных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках криволинейных участков при движении транспортного средства по транспортной балке.
Кузов транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке наклонных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках наклонных участков при движении транспортного средства по транспортной балке.
Поставленная задача решается также тем, что для уравновешивания инерционных сил, действующих на пассажиров транспортного средства в монорельсовой транспортной системе навесного типа, возникающих в процессе движения транспортного средства инерционных сил и вызывающих отклонение туловища пассажира к передней, задней или боковым стенкам кузова транспортного средства, вращают пол транспортного средства вокруг оси, параллельной вектору его линейной скорости, и/или оси, параллельной нормали к вектору линейной скорости транспортного средства, при этом расположение указанных осей принимают между основанием кузова и центром масс пола.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Пол транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, при движении транспортного средства по криволинейному участку транспортной балки, при этом к транспортной балке приближают продольную кромку пола, ближайшую к центру кривизны криволинейного участка транспортной балки.
Пол транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при движении транспортного средства по наклонному участку транспортной балки, при этом в случае движения по нисходящему участку транспортной балки от транспортной балки удаляют переднюю по ходу движения кромку пола, а в случае движения по восходящему участку транспортной балки - заднюю кромку пола.
Пол транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при ускоренном или замедленном в продольном направлении движении транспортного средства, при этом в случае замедления движения от транспортной балки удаляют переднюю по ходу движения кромку пола, а в случае ускорения движения - заднюю кромку пола.
Пол транспортного средства вращают одновременно вокруг оси, параллельной вектору линейной скорости транспортного средства, и оси, параллельной нормали к вектору линейной скорости транспортного средства, при движении транспортного средства одновременно по криволинейному и наклонному участкам транспортной балки, при этом при вращении вокруг первой из указанных осей к транспортной балке приближают продольную кромку пола, ближайшую к центру кривизны криволинейного участка транспортной балки, а при вращении вокруг второй оси на нисходящем и восходящем участках удаляют от транспортной балки соответственно переднюю и заднюю по ходу движения кромки пола.
Пол транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, в пределах 0°...αk, где αk = arctg(V2/gR), V - линейная скорость транспортного средства, R - радиус кривизны криволинейного участка транспортной балки, g - ускорение свободного падения.
Пол транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, в пределах 0°...βk, где βk′- угол спуска (наклона) транспортной балки.
Пол транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, в пределах 0°...χk, где χk = arctg(a/g), а - линейное ускорение транспортного средства, g - ускорение свободного падения.
Пол транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке криволинейных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках криволинейных участков при движении транспортного средства по транспортной балке.
Пол транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке наклонных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках наклонных участков при движении транспортного средства по транспортной балке.
Дополнительно вращают кузов транспортного средства вокруг оси, параллельной вектору линейной скорости транспортного средства и расположенной между транспортной балкой и центром масс кузова.
Дополнительно вращают кузов транспортного средства вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства и расположенной между транспортной балкой и центром масс кузова.
Поставленная задача решается также тем, что для уравновешивания инерционных сил, действующих на пассажиров транспортного средства в монорельсовой транспортной системе навесного типа, возникающих в процессе движения транспортного средства инерционных сил, вызывающих отклонение туловища пассажира к передней, задней или боковым стенкам кузова транспортного средства, вращают кресла вокруг оси, параллельной вектору его линейной скорости, и/или оси, параллельной нормали к вектору линейной скорости, при этом расположение указанных осей принимают между полом транспортного средства и центром масс кресел.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Кресла транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, при движении транспортного средства по криволинейному участку транспортной балки, при этом к транспортной балке приближают продольную кромку кресел, ближайшую к центру кривизны криволинейного участка транспортной балки.
Кресла транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при движении транспортного средства по наклонному участку транспортной балки, при этом в случае движения по нисходящему участку транспортной балки от транспортной балки удаляют переднюю по ходу движения кромку кресел, а в случае движения по восходящему участку транспортной балки - заднюю кромку кресел.
Кресла транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при ускоренном или замедленном в продольном направлении движении транспортного средства, при этом в случае замедления движения от транспортной балки удаляют переднюю по ходу движения кромку кресел, а в случае ускорения движения - заднюю кромку кресел.
Кресла транспортного средства вращают одновременно вокруг оси, параллельной вектору линейной скорости транспортного средства, и оси, параллельной нормали к вектору линейной скорости транспортного средства, при движении транспортного средства одновременно по криволинейному и наклонному участкам транспортной балки, при этом при вращении вокруг первой из указанных осей к транспортной балке приближают продольную кромку кресел, ближайшую к центру кривизны криволинейного участка транспортной балки, а при вращении вокруг второй оси на нисходящем и восходящем участках от транспортной балки удаляют соответственно переднюю и заднюю по ходу движения кромки кресел.
Кресла транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, в пределах 0°...αk, где αk = arctg(V2/gR), V - линейная скорость транспортного средства, R - радиус кривизны криволинейного участка транспортной балки, g - ускорение свободного падения.
Кресла транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, в пределах 0°...βk, где βk′- угол спуска (наклона) транспортной балки.
Кресла транспортного средства вращают вокруг оси, параллельной нормали к.вектору линейной скорости транспортного средства, в пределах 0°...χk, где χk = arctg(a/g), a - линейное ускорение транспортного средства, g - ускорение свободного падения.
Кресла транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке криволинейных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках криволинейных участков при движении транспортного средства по транспортной балке.
Кресла транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке наклонных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках наклонных участков при движении транспортного средства по транспортной балке.
Дополнительно вращают пол транспортного средства вокруг оси, параллельной вектору линейной скорости транспортного средства и расположенной между основанием кузова и центром масс пола.
Дополнительно вращают пол транспортного средства вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства и расположенной между транспортной балкой и центром масс кузова.
Дополнительно вращают кузов транспортного средства вокруг оси, параллельной вектору линейной скорости транспортного средства и расположенной между транспортной балкой и центром масс кузова.
Дополнительно вращают кузов транспортного средства вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства и расположенной между транспортной балкой и центром масс кузова.
В части транспортной системы поставленная задача решается тем, что монорельсовая транспортная система навесного типа, содержащая транспортную балку и установленное на ней транспортное средство, состоящее из ходовой рамы, кузова, шарнирно закрепленного на ходовой раме, и устройства вращения кузова вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова, и/или оси шарнирного крепления, ориентированной в поперечном направлении кузова, и фиксации в заданном положении.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Продольная ось шарнирного крепления кузова на ходовой раме расположена по продольной оси симметрии кузова.
Поперечная ось шарнирного крепления кузова на ходовой раме расположена по поперечной оси симметрии кузова.
Устройство вращения кузова вокруг шарнирных осей крепления и фиксации его в заданном положении выполнено в виде гидравлических приводов, выполненных с использованием силовых цилиндров с подвижно установленными в их полостях поршнями со штоками и источника давления, сообщенного магистралями с полостями цилиндров, при этом гидравлические приводы установлены по одну сторону соответствующей оси шарнирного крепления, цилиндры скреплены с ходовой рамой, а штоки поршней - с кузовом.
Гидравлические приводы установлены попарно по разные стороны соответствующих осей шарнирного крепления кузова с рамой.
Устройство вращения кузова вокруг шарнирных осей крепления и фиксации его в заданном положении выполнено с использованием электромагнитов с притягивающими полюсами и источника электрического питания, соединенного с электромагнитами, при этом электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, а притягивающие полюса электромагнитов установлены попарно напротив друг друга и жестко скреплены соответственно с рамой и кузовом.
Устройство вращения кузова вокруг шарнирных осей крепления и фиксации его в заданном положении выполнено с использованием предварительно растянутых упругих элементов, электромагнитов с притягивающими полюсами и источника электрического питания, соединенного с электромагнитами, при этом упругие элементы и электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, упругие элементы жестко скреплены соответственно с ходовой рамой и кузовом, а полюса электромагнитов жестко скреплены соответственно с рамой и кузовом и расположены напротив друг друга.
Поставленная задача решается также тем, что монорельсовая транспортная система навесного типа, содержащая транспортную балку и установленное на ней транспортное средство, состоящее из ходовой рамы, кузова с полом, шарнирно прикрепленным к кузову, и устройства вращения пола вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова, и/или оси шарнирного крепления, ориентированной в поперечном направлении кузова, и фиксации в заданном положении.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Продольная ось шарнирного крепления пола к кузову расположена по продольной оси симметрии кузова.
Поперечная ось шарнирного крепления пола к кузову расположена по поперечной оси симметрии кузова.
Устройство вращения пола вокруг осей шарнирного крепления и фиксации его в заданном положении выполнено в виде гидравлических приводов, выполненных с использованием силовых цилиндров с подвижно установленными в их полостях поршнями со штоками и источника давления, сообщенного магистралями с полостями цилиндров, при этом гидравлические приводы установлены по одну сторону соответствующей оси шарнирного крепления, цилиндры скреплены с кузовом, а штоки поршней - с полом.
Гидравлические приводы установлены попарно по разные стороны соответствующих осей шарнирного крепления пола с кузовом.
Устройство вращения пола вокруг осей шарнирного крепления и фиксации его в заданном положении выполнено с использованием электромагнитов с притягивающими полюсами и источника электрического питания, соединенного с электромагнитами, при этом электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, а притягивающие полюса электромагнитов установлены попарно напротив друг друга и жестко скреплены соответственно с кузовом и полом.
Устройство вращения пола вокруг осей шарнирного крепления и фиксации его в заданном положении выполнено в виде предварительно растянутых упругих элементов, электромагнитов с притягивающими полюсами и источника электрического питания, соединенного с электромагнитами, при этом упругие элементы и электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, упругие элементы жестко скреплены соответственно с кузовом и полом, а полюса электромагнитов жестко скреплены соответственно с кузовом и полом и расположены напротив друг друга.
Поставленная задача решается также тем, что монорельсовая транспортная система навесного типа, содержащая транспортную балку и установленное на ней транспортное средство, состоящее из ходовой рамы, кузова с полом и креслами, шарнирно прикрепленными к полу, и устройства вращения кресел вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова, и/или оси шарнирного крепления, ориентированной в поперечном направлении кузова, и фиксации в заданном положении.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Продольная ось шарнирного крепления кресел к полу расположена по продольной оси симметрии кресел.
Поперечная ось шарнирного крепления кресел к полу расположена по поперечной оси симметрии кресел.
Оси шарнирного крепления кресел к полу кузова ориентированы в продольном и поперечном направлениях кузова.
Устройство вращения кресел вокруг осей шарнирного крепления и фиксации их в заданном положении выполнено в виде гидравлических приводов, выполненных с использованием силовых цилиндров с подвижно установленными в их полостях поршнями со штоками и источника давления, сообщенного магистралями с полостями цилиндров, при этом гидравлические приводы установлены по одну сторону соответствующей оси шарнирного крепления, цилиндры скреплены с полом кузова, а штоки поршней - с креслами.
Гидравлические приводы установлены попарно по разные стороны соответствующих осей шарнирного крепления, цилиндры скреплены с полом кузова, а штоки поршней - с креслами.
Устройство вращения кресел вокруг осей шарнирного крепления и фиксации их в заданном положении выполнено с использованием электромагнитов с притягивающими полюсами и источника электрического питания, соединенного с электромагнитами, при этом электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, а притягивающие полюса электромагнитов установлены попарно напротив друг друга и жестко скреплены соответственно с креслами и полом кузова.
Устройство вращения кресел вокруг осей шарнирного крепления и фиксации их в заданном положении выполнено с использованием предварительно растянутых упругих элементов, электромагнитов с притягивающими полюсами и источника электрического питания, соединенного с электромагнитами, при этом упругие элементы и электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, упругие элементы жестко скреплены соответственно с полом кузова и креслами, а полюса электромагнитов жестко скреплены соответственно с полом кузова и креслами и расположены напротив друг друга.
Частные существенные признаки изобретения представлены на фиг. 1...20.
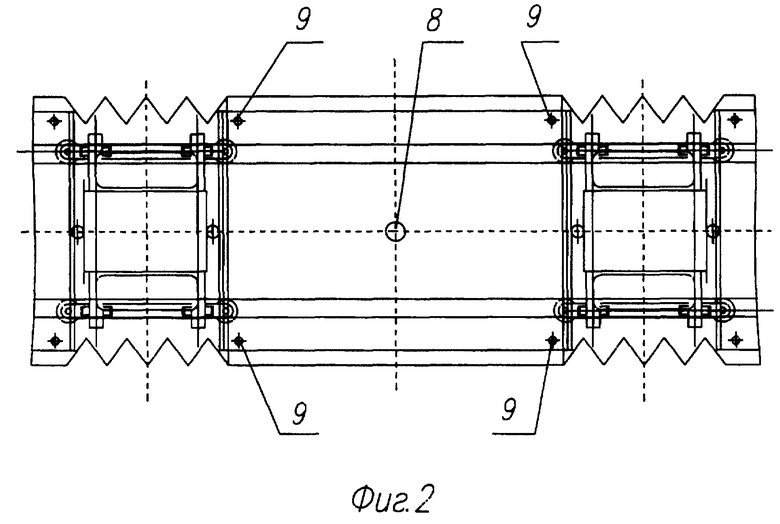
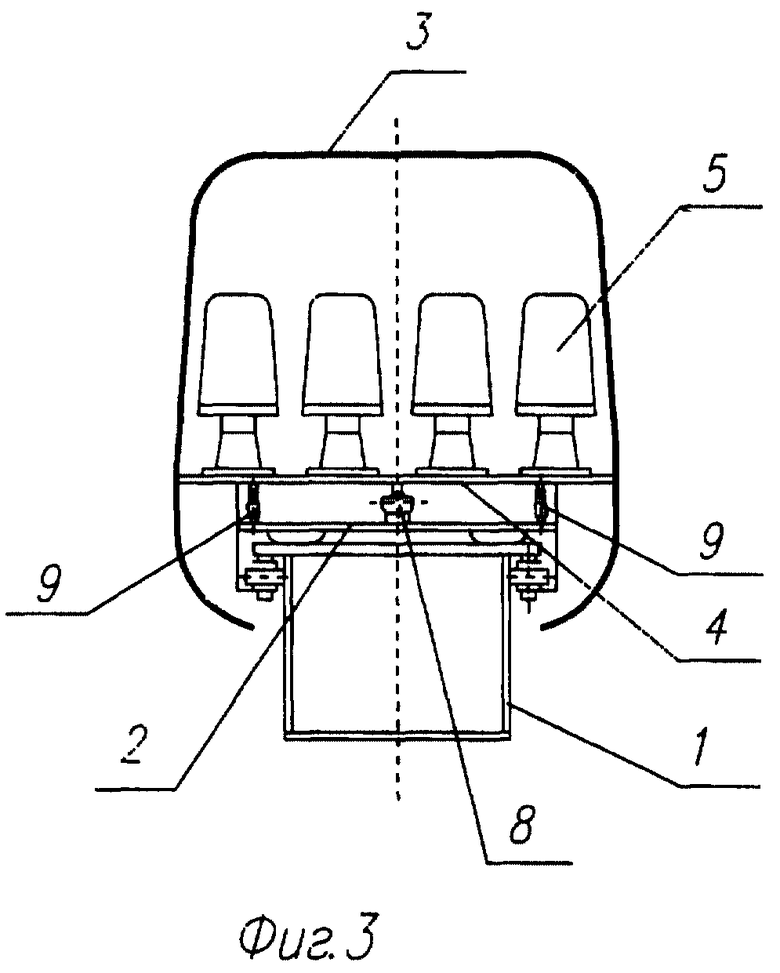
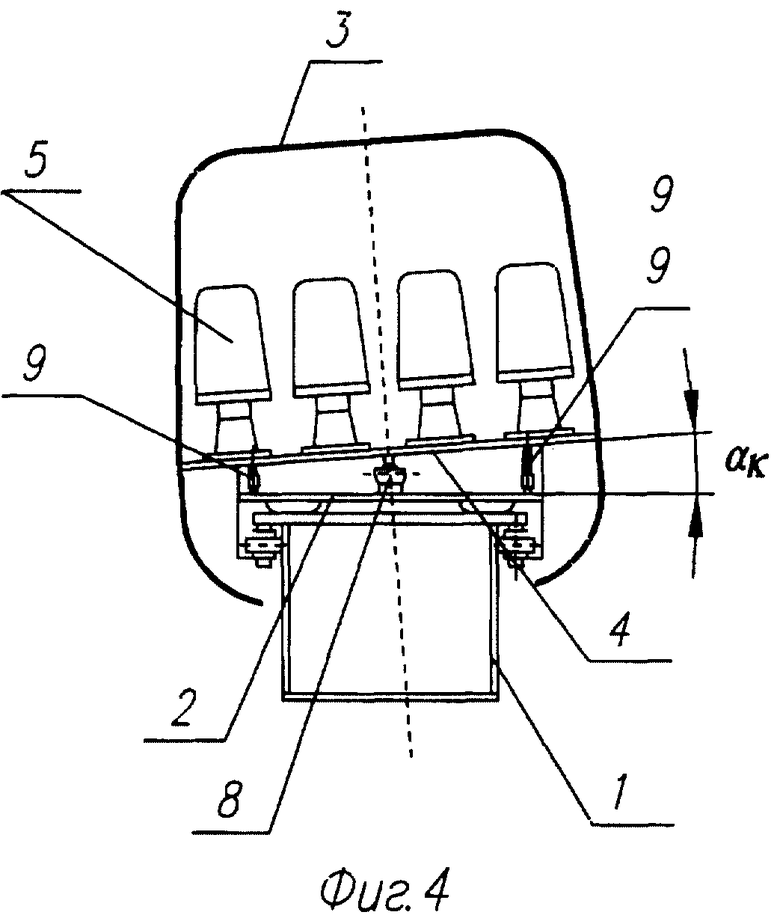
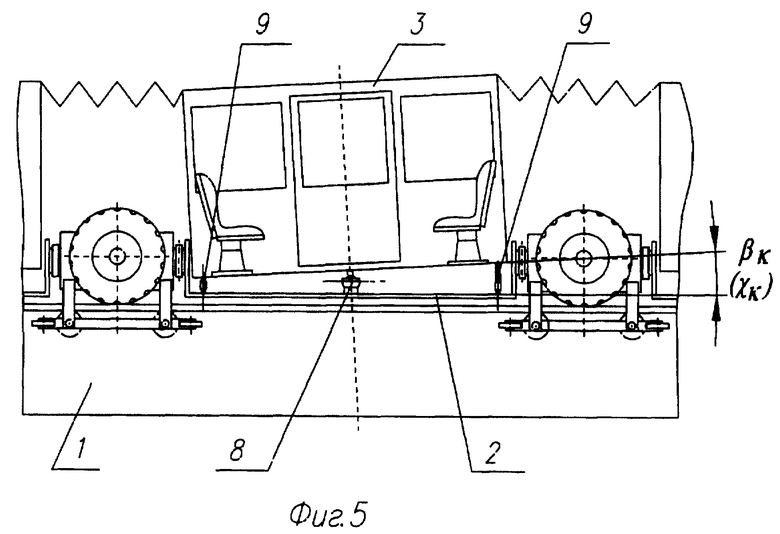
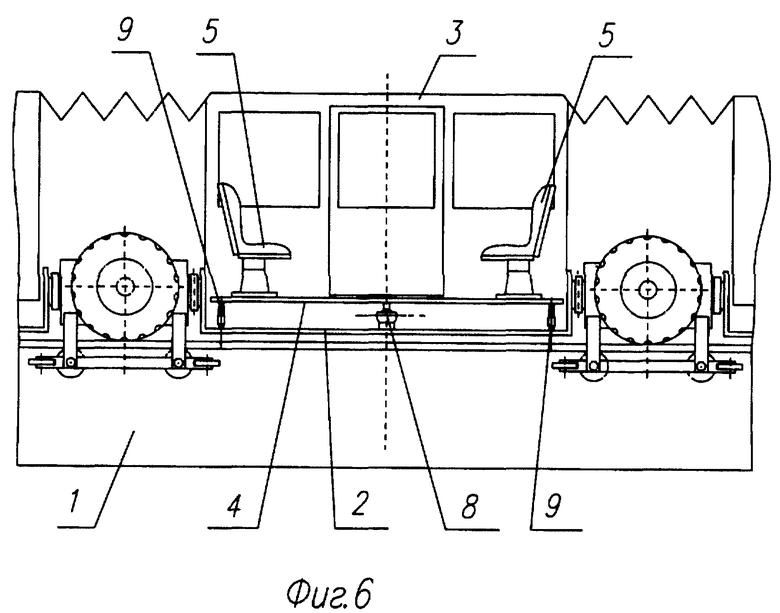
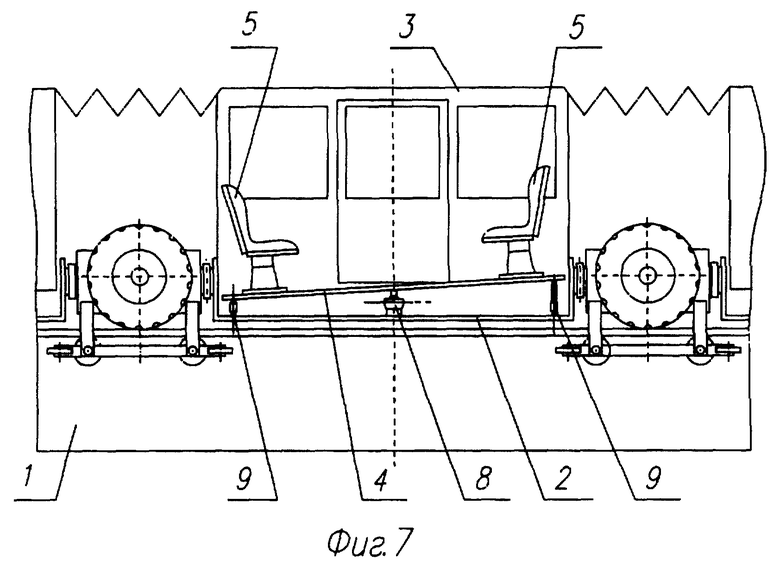
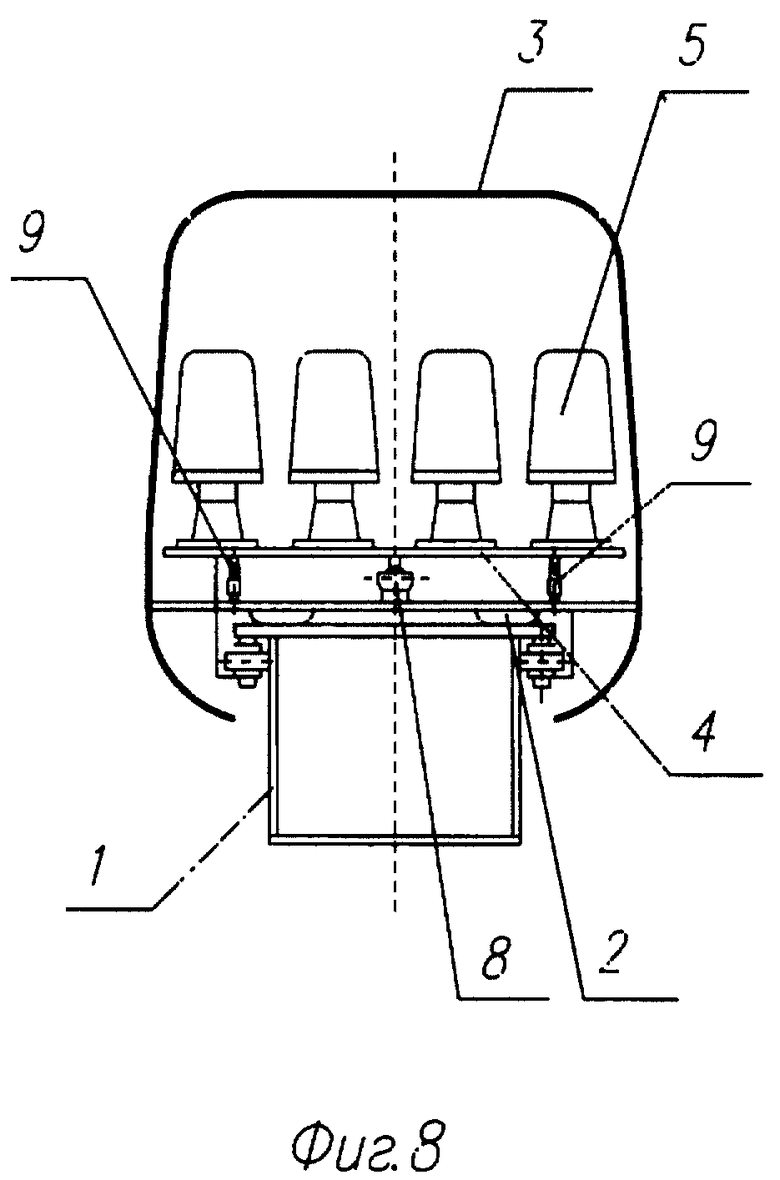
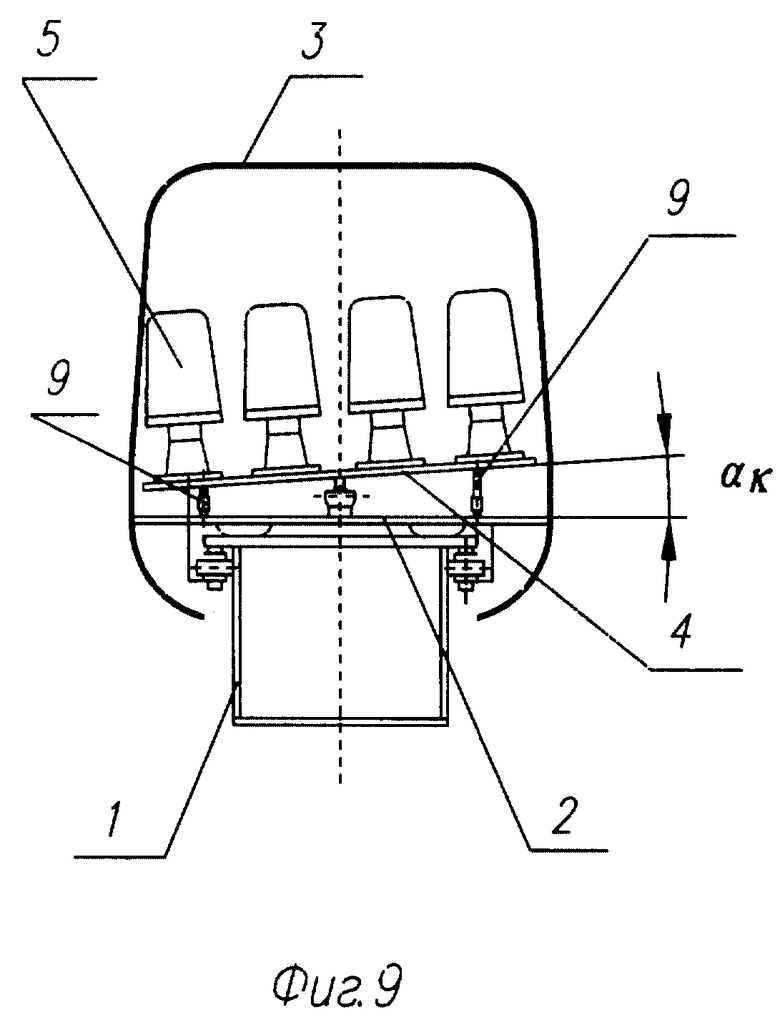
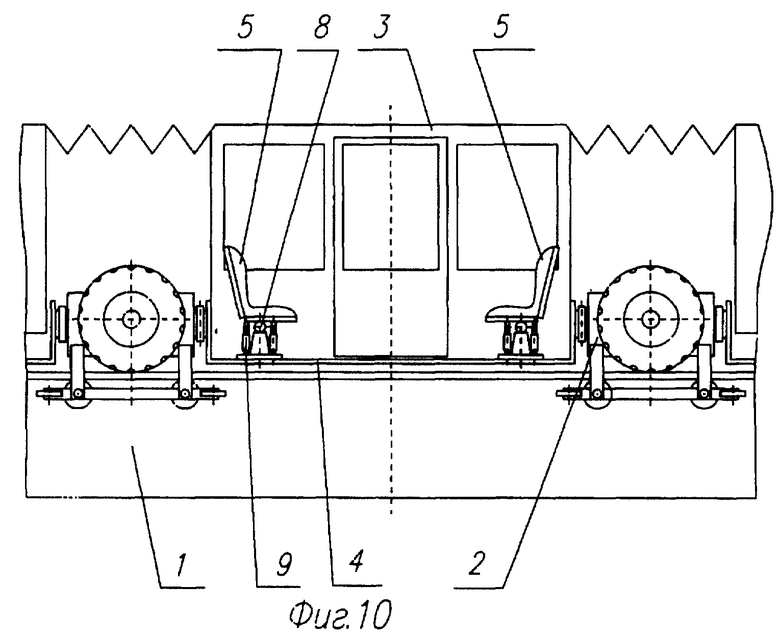
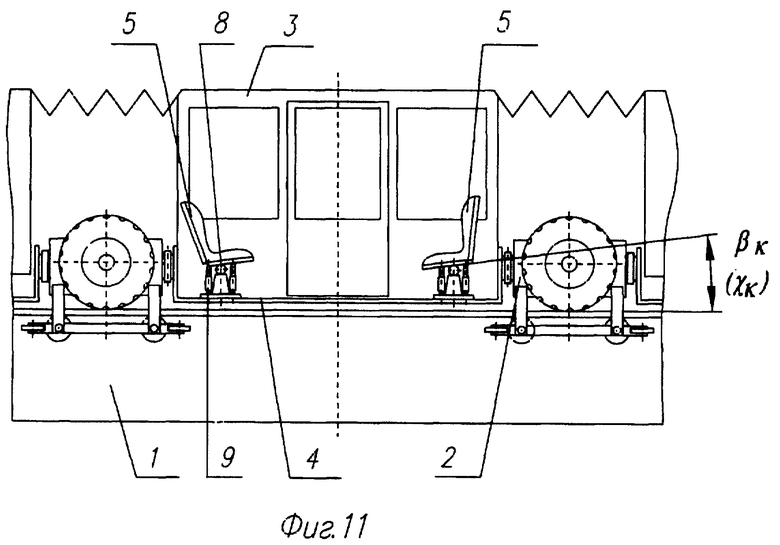
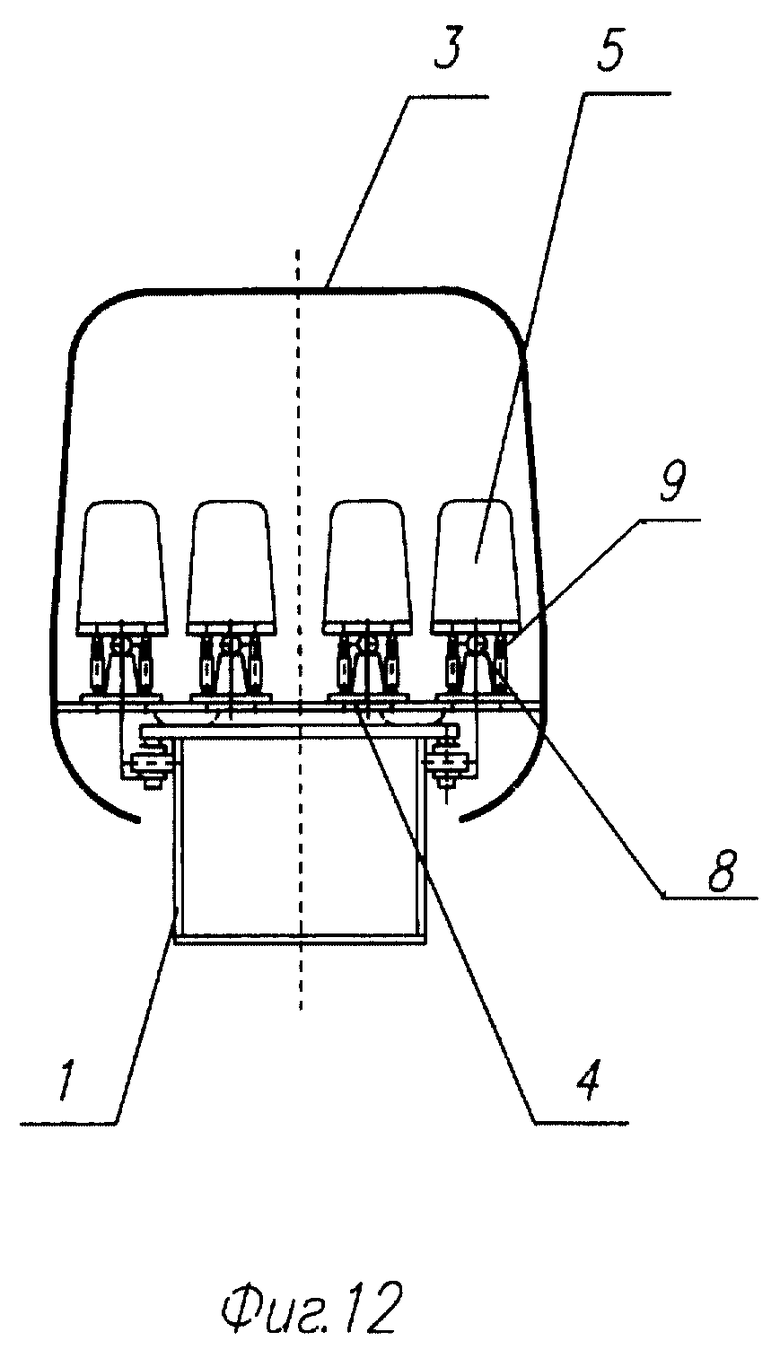
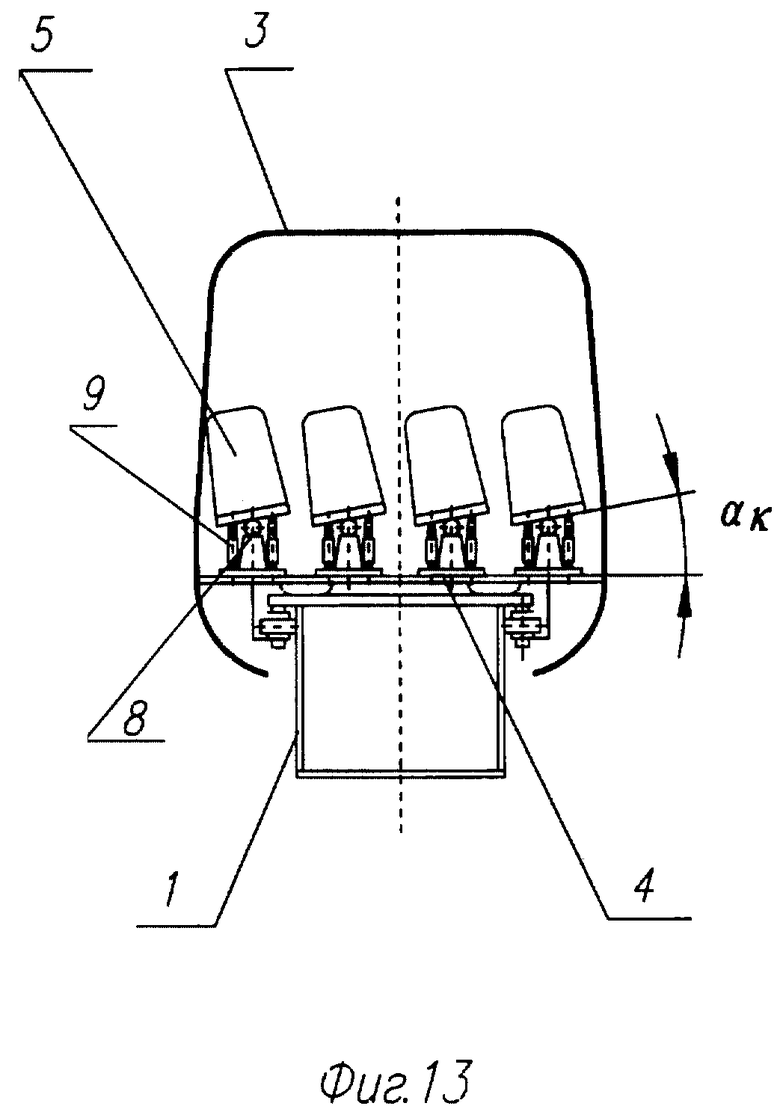
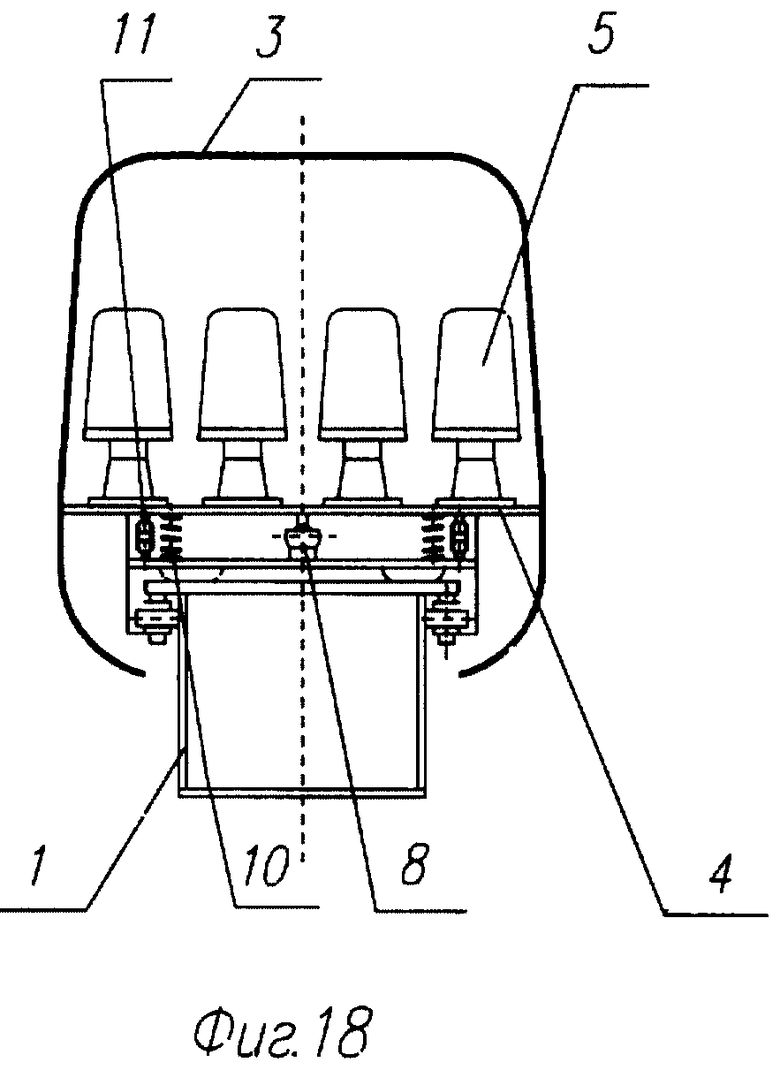
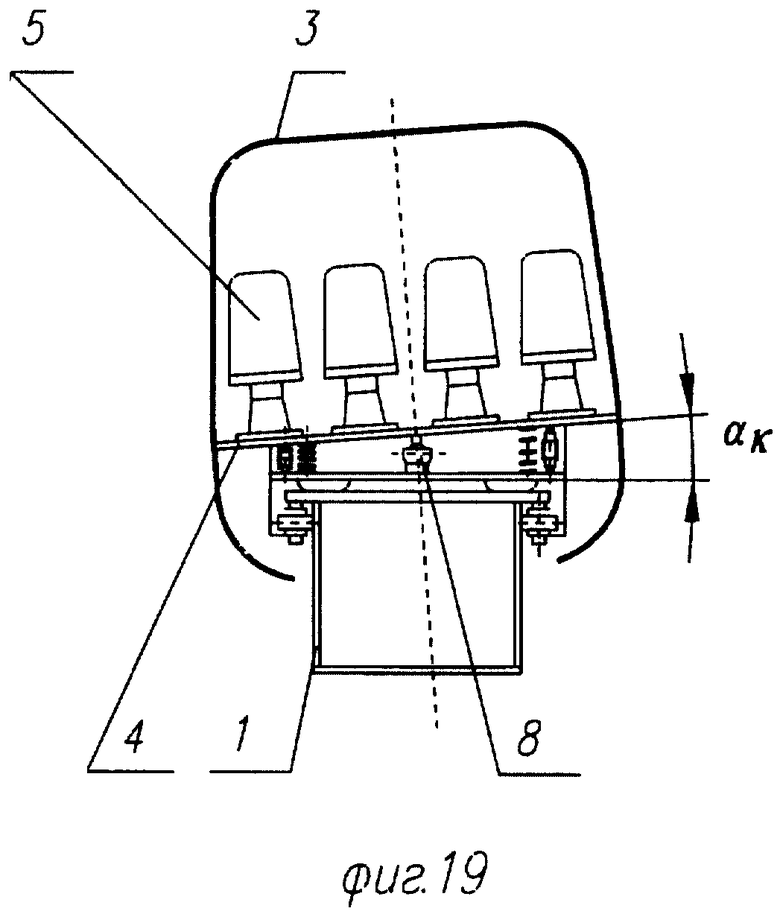
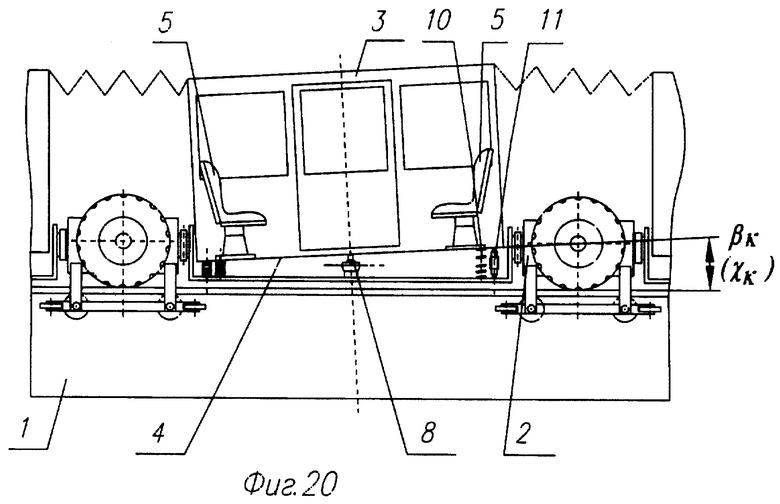
На фиг. 1 - вид сбоку на транспортное средство с устройствами шарнирного крепления кузова, поворота и фиксации его относительно ходовой рамы; на фиг. 2 - вид сверху на транспортное средство фиг. 1; на фиг. 3 - сечение А-А фиг. 1; на фиг. 4 - сечение А-А фиг. 1, когда кузов транспортного средства повернут относительно транспортной балки; на фиг. 5 - вид сбоку на транспортное средство, когда кузов транспортного средства повернут относительно транспортной балки; на фиг. 6 - вид сбоку на транспортное средство с устройствами шарнирного крепления пола, поворота и фиксации его относительно кузова; на фиг. 7 - вид сбоку на транспортное средство, когда пол транспортного средства повернут относительно транспортной балки; на фиг. 8 - сечение Б-Б фиг. 6; на фиг. 9 - сечение Б-Б фиг.6, когда пол транспортного средства повернут относительно транспортной балки; на фиг. 10 - вид сбоку на транспортное средство с устройствами шарнирного крепления кресла, поворота и фиксации его относительно кузова; на фиг. 11 - вид сбоку на транспортное средство, когда кресла транспортного средства повернуты относительно транспортной балки; на фиг. 12 - сечение В-В фиг. 10; на фиг. 13 - сечение В-В фиг. 10, когда кресла транспортного средства повернуты относительно транспортной балки; на фиг. 14 - маркеры, установленные на криволинейном участке транспортной балки; на фиг. 15 - датчики системы управления информацией о характеристиках участков транспортной балки в контакте с маркерами; на фиг. 16 - вид сбоку на транспортное средство с устройствами шарнирного крепления кузова, поворота и фиксации его относительно кузова, выполненными в виде предварительно растянутых упругих элементов и электромагнитов с притягивающими полюсами; на фиг. 17 - вид сверху на транспортное средство фиг. 16; на фиг. 18 - сечение Г-Г фиг. 16; на фиг. 19 - сечение Г-Г фиг. 16, когда кузов транспортного средства повернут относительно транспортной балки; на фиг. 20 - вид сбоку на транспортное средство фиг. 16, когда кузов транспортного средства повернут относительно транспортной балки.
На фиг. 1...5 показана монорельсовая транспортная система навесного типа 1-го варианта исполнения.
На фиг. 6...9 показана монорельсовая транспортная система навесного типа 2-го варианта исполнения.
На фиг. 10. ..13 показана монорельсовая транспортная система навесного типа 3-го варианта исполнения.
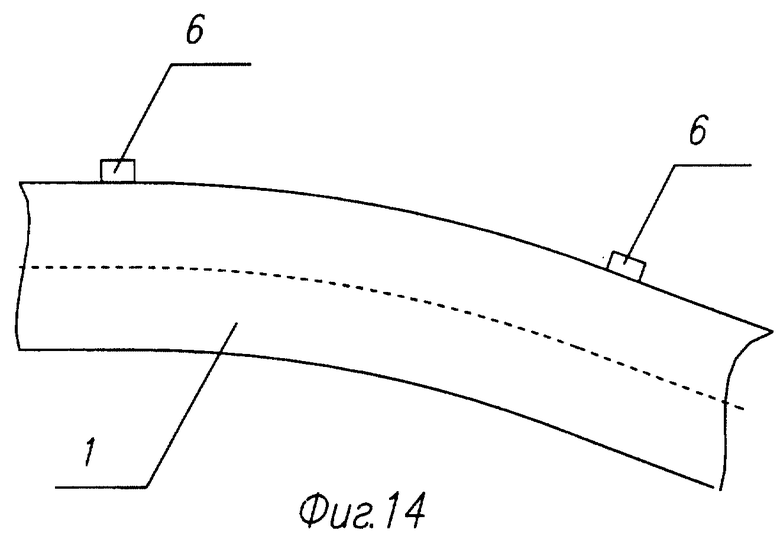
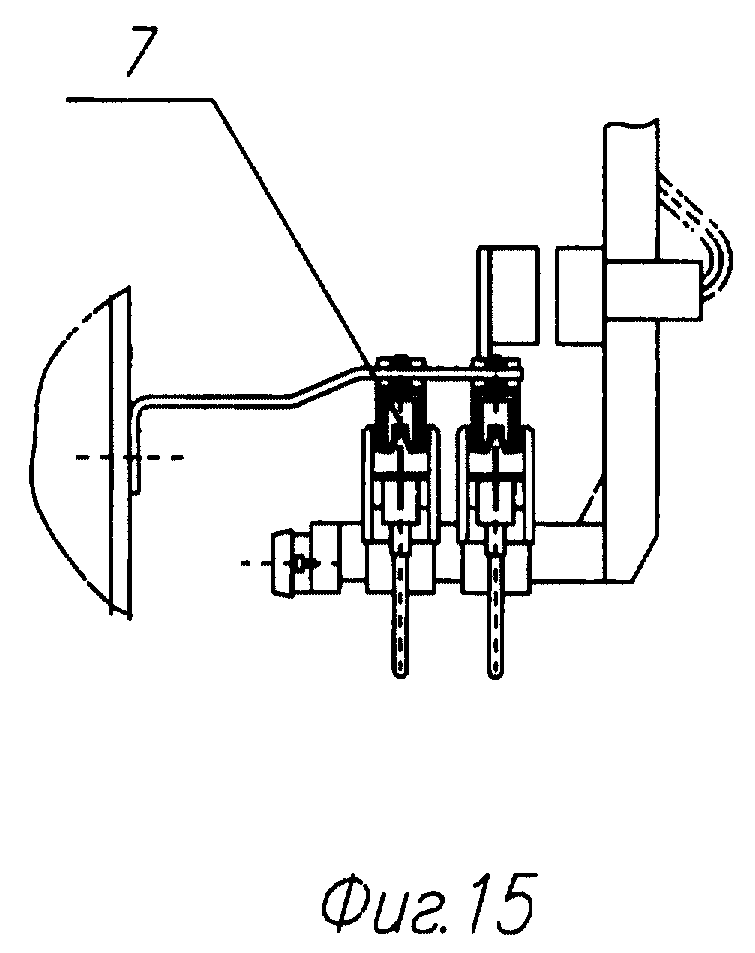
На фиг. 14...15 показан пример установки маркеров на транспортной балке для любого варианта (1. ..3) монорельсовой транспортной системы навесного типа.
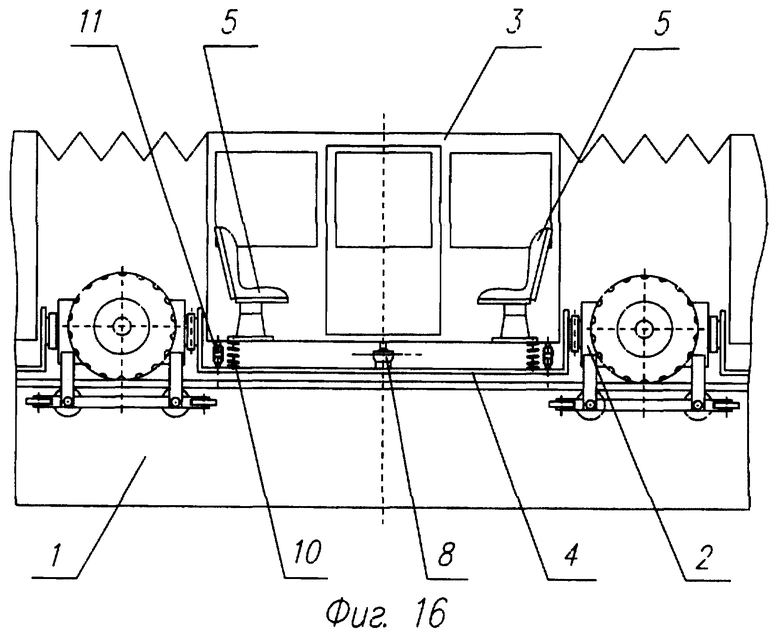
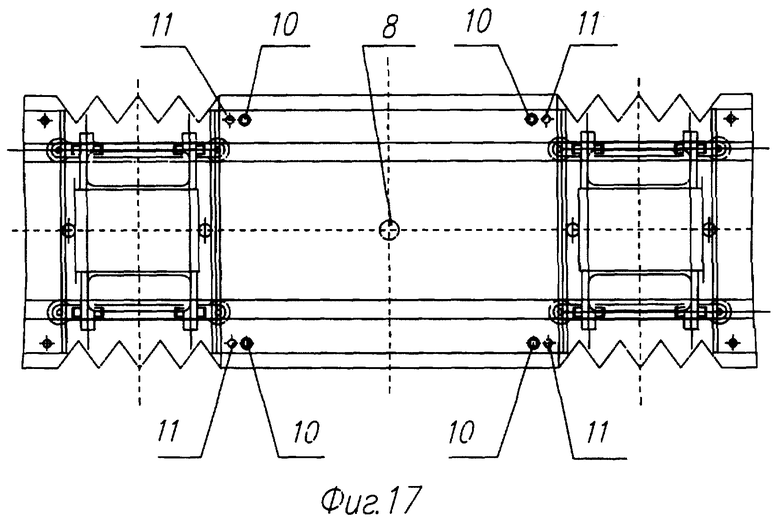
На фиг. 16. ..20 показан пример выполнения устройства шарнирного крепления кузова, поворота и фиксации его относительно ходовой тележки.
Во всех вариантах (1...3) исполнения предложенная монорельсовая транспортная система навесного типа (фиг. 1...20) содержит транспортную балку 1 и транспортное средство, состоящее из ходовой рамы 2, закрепленного на ней кузова 3 с полом 4 и креслами 5.
В любом из вариантов (1. . .3) исполнения предложенная монорельсовая транспортная система навесного типа может содержать на транспортной балке в начале и конце наклонных ее участков, а также в начале и конце криволинейных ее участков маркеры 6 (фиг. 14), например, с электромагнитными излучателями 7 (фиг. 15).
Вариант 1
Для варианта 1 (фиг. 1...5) кузов 3 при помощи шарнира 8 закреплен на ходовой раме 2. Устройства вращения и фиксации 9 кузова вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова, и/или оси шарнирного крепления, ориентированной в поперечном направлении кузова, и фиксации в заданном положении (устройство фиксации на фигурах не показано).
Вариант 2
Для варианта 2 (фиг. 6...9) пол 4 при помощи шарнира 8 закреплен на основании кузова 3. Устройства вращения и фиксации 9 кузова вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова, и/или оси шарнирного крепления, ориентированной в поперечном направлении кузова, и фиксации в заданном положении (устройство фиксации на фигурах не показано).
Вариант 3
Для варианта 3 (фиг.10...13) кресла 5 при помощи шарнира 8 закреплены на полу 4 кузова 3. Устройства вращения и фиксации 9 кузова вокруг оси шарнирного крепления, ориентированной в продольном направлении кузова, и/или оси шарнирного крепления, ориентированной в поперечном направлении кузова, и фиксации в заданном положении (устройство фиксации на фигурах не показано).
Устройство вращения 9 кузова 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вокруг шарнирных осей 8 крепления и фиксации, например, может быть выполнено в виде гидравлических приводов, выполненных с использованием силовых цилиндров с подвижно установленными в их полостях поршнями со штоками и источника давления, сообщенного магистралями с полостями цилиндров, при этом гидравлические приводы установлены по одну сторону соответствующей оси шарнирного крепления, цилиндры скреплены с ходовой рамой, а штоки поршней - с кузовом (на фигурах не показано).
Устройство вращения 9 кузова 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вокруг шарнирных осей 8 крепления и фиксации, например, может быть выполнено с использованием электромагнитов (на фигурах не показано) с притягивающими полюсами и источника электрического питания (на фигурах не показано), соединенного с электромагнитами, при этом электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, а притягивающие полюса электромагнитов установлены попарно напротив друг друга и жестко скреплены соответственно с ходовой рамой 2 и кузовом 3 (вариант 1), или с основанием кузова 3 и полом 4 (вариант 2), или с полом 4 и креслом 5 (вариант 3).
Устройство вращения 9 кузова 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вокруг шарнирных осей 8 крепления и фиксации, например, может быть выполнено с использованием предварительно растянутых упругих элементов 10, электромагнитов 11 с притягивающими полюсами и источника электрического питания (на фигурах не показано), соединенного с электромагнитами, при этом упругие элементы и электромагниты установлены попарно по разные стороны соответствующих осей шарнирного крепления, упругие элементы жестко скреплены соответственно с ходовой рамой 2 и кузовом 3 (вариант 1), или с основанием кузова 3 и полом 4 (вариант 2), или с полом 4 и креслом 5 (вариант 3), а полюса электромагнитов жестко скреплены соответственно с ходовой рамой 2 и кузовом 3 (вариант 1), или с основанием кузова 3 и полом 4 (вариант 2), или с полом 4 и креслом 5 (вариант 3) и расположены напротив друг друга.
Способ уравновешивания инерционных сил, действующих на пассажиров транспортного средства в монорельсовой транспортной системе навесного типа, осуществляется при работе последней следующим образом.
В случае движения транспортного средства по криволинейному участку транспортной балки кузов 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, при этом крышу кузова смещают по направлению к центру кривизны криволинейного участка транспортной балки. Кузов вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, в пределах 0°...αk, где αk = arctg(V2/gR), V - линейная скорость транспортного средства, R - радиус кривизны криволинейного участка транспортной балки, g - ускорение свободного падения.
В случае движения транспортного средства по наклонному участку транспортной балки кузов 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при этом в случае движения по нисходящему участку транспортной балки от транспортной балки удаляют передний по ходу движения торец кузова, а в случае движения по восходящему участку транспортной балки - задний торец кузова. Кузов транспортного средства в пределах 0°...βk, где βk′- угол наклона транспортной балки.
В случае движения транспортного средства при ускорении или замедлении в продольном направлении его кузов 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, при этом в случае замедления движения удаляют от транспортной балки передний по ходу движения торец кузова, а в случае ускорения движения - задний торец кузова. Кузов транспортного средства вращают в пределах 0°...χk, где χk = arctg(a/g), a - линейное ускорение транспортного средства, g - ускорение свободного падения.
В случае движения транспортного средства одновременно по криволинейному и наклонному участкам транспортной балки, кузов 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) вращают одновременно вокруг оси, параллельной вектору линейной скорости транспортного средства, и оси, параллельной нормали к вектору линейной скорости транспортного средства, при этом при вращении вокруг первой из указанных осей крышу кузова смещают по направлению к центру кривизны криволинейного участка транспортной балки, а при вращении вокруг второй оси на нисходящем и восходящем участках от транспортной балки удаляют соответственно передний и задний по ходу движения торцы кузова.
Кузов 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) транспортного средства вращают вокруг оси, параллельной вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке криволинейных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках криволинейных участков при движении транспортного средства по транспортной балке.
Кузов 3 (вариант 1), или пол 4 (вариант 2), или кресло 5 (вариант 3) транспортного средства вращают вокруг оси, параллельной нормали к вектору линейной скорости транспортного средства, с использованием автоматизированной системы управления по программе, основанной на предварительной маркировке наклонных участков транспортной балки и последовательном считывании с маркеров транспортной балки посредством датчиков системы управления информации о характеристиках наклонных участков при движении транспортного средства по транспортной балке.
Предложенные способы функционирования монорельсовой транспортной системы навесного типа и конструктивные исполнения транспортных средств в обеспечении реализации этих способов объединены единым изобретательским замыслом, направленным на уравновешивание поперечных сил при движении транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА КОНВЕРТИРУЕМОГО ТИПА | 1999 |
|
RU2158211C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2004 |
|
RU2276027C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2007 |
|
RU2356766C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| ХОДОВОЙ ПУТЬ ДЛЯ МОНОРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2264316C1 |
| ЭНЕРГОПОГЛОЩАЮЩИЙ КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2565639C1 |
| Вагон монорельсовой транспортной системы | 1981 |
|
SU977243A1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НАВЕСНОГО ТИПА | 1999 |
|
RU2145557C1 |
Изобретение относится к скоростным монорельсовым транспортным системам навесного типа. Для уравновешивания инерционных сил, вызывающих отклонение туловища пассажира к стенкам кузова транспортного средства, вращают кузов вокруг оси, параллельной вектору линейной скорости, и/или оси, параллельной нормали к вектору, при этом расположение осей принимают между транспортной балкой и центром масс кузова. Система содержит транспортную балку и установленное на ней транспортное средство, состоящее из ходовой рамы, кузова и устройства вращения кузова вокруг осей шарнирного крепления, ориентированных в продольном и поперечном направлениях кузова, и фиксации в заданном положении. В предложенном техническом решении обеспечивается эффективная компенсация инерционных сил, действующих на пассажира. 6 с. и 54 з.п. ф-лы. 20 ил.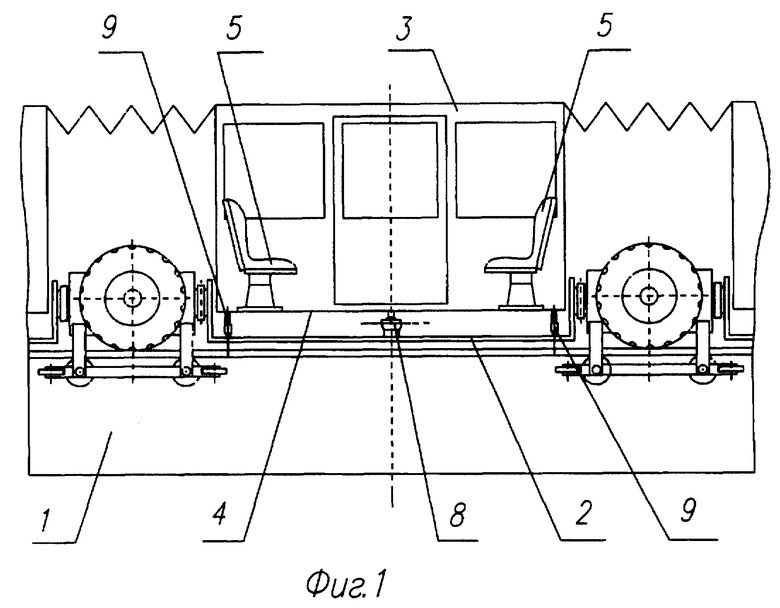
| Устройство для измерения температуры | 1977 |
|
SU647553A1 |
| DE 4112879 A1, 29.10.1992 | |||
| DE 4343998 A1, 20.07.1995 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ПОПЕРЕЧНЫХ ГОРИЗОНТАЛЬНЫХ СИЛ ОТ КУЗОВА НА ТЕЛЕЖКЕ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2016798C1 |

