Изобретение относится к области измерительной техники, в частности к устройствам, использующимся в качестве рабочего стола для проекционной аппаратуры уменьшенных изображений, для систем удержания электронных пучков или для устройств исследования различных структур сканирующим зондовым микроскопом.
Устройство позиционирования, совмещения и перемещения, использующееся для описанных выше систем, требует с одной стороны точности позиционирования и совмещения порядка 0,001 мкм, а с другой стороны - высокой скорости позиционирования.
Известно устройство перемещения, совмещения и позиционирования, содержащее каретку, закрепленный на каретке посредством упругих опор механизм совмещения и позиционирования, выполненный в виде платы, и приводы линейных перемещений по горизонтали каретки и платы, обеспечивающие поворот платы относительно вертикальной оси и ее горизонтальные перемещения по двум взаимно перпендикулярным направлениям (патент US N 4575942, G 01 B 5/25, 18.03.86).
Недостатком известного устройства является невозможность обеспечения перемещения платы по шести степеням свободы, что ограничивает функциональные возможности устройства.
Задачей, на решение которой направлено настоящее изобретение, является создание устройства перемещения, совмещения и позиционирования, которое бы обеспечивало технический результат, связанный с расширением функциональных возможностей устройства за счет обеспечения перемещений выходного звена механизма совмещения и позиционирования по шести степеням свободы.
Указанная задача в предлагаемом изобретении решается за счет того, что устройство перемещения, совмещения и позиционирования, содержащее каретку, закрепленный на каретке посредством упругих опор механизм совмещения и позиционирования и приводы линейных перемещений по горизонтали каретки и механизма совмещения и позиционирования, согласно изобретению снабжено основанием, образующим с установленной на нем кареткой и с размещенным на каретке подвижным звеном двухкоординатный горизонтальный стол, подвижное звено снабжено приводом его линейных перемещений по горизонтали, приводы линейных перемещений каретки и подвижного звена установлены соответственно на основании и каретке по двум взаимно перпендикулярным направлениям, а механизм совмещения и позиционирования включает подвижную нижнюю раму, связанную посредством упругих шарниров с платформой, подвижную верхнюю раму, связанную с наружней стороны, по крайней мере, с тремя приводами ее линейных перемещений по вертикали, а с внутренней стороны посредством упругих элементов - с предметным столиком, и установленную на предметном столике пластину, при этом механизм совмещения и позиционирования закреплен на подвижном звене двухкоординатного стола посредством упругих шарниров, смонтированных в неподвижных стойках подвижного звена, приводы линейных перемещений по горизонтали механизма совмещения и позиционирования установлены на подвижном звене по двум взаимно перпендикулярным направлениям и связаны соответственно с нижней подвижной рамой и платформой, приводы линейных перемещений по вертикали подвижной верхней рамы установлены на платформе, а предметный столик связан с двумя приводами линейных перемещений по горизонтали, установленными с возможностью обеспечения его вращения относительно вертикальной оси.
Сущность изобретения поясняется чертежами, где:
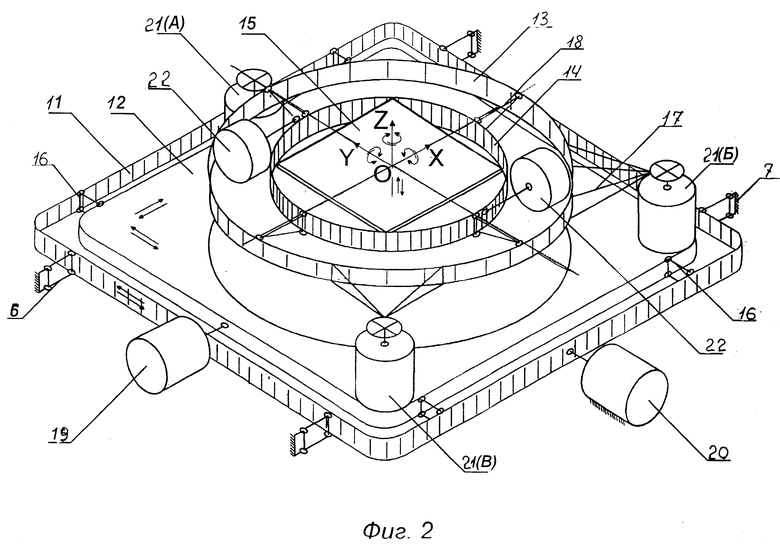
на фиг. 1 - представлен общий вид устройства перемещения, совмещения и позиционирования;
на фиг. 2 - механизм совмещения и позиционирования.
Устройство перемещения, совмещения и позиционирования содержит основание 1, на котором в направляющих 4 установлена каретка 3. На каретке 3 в направляющих 4 установлено подвижное звено 5, на котором закреплен посредством упругих шарниров 6, смонтированных в неподвижных стойках 7, механизм совмещения и позиционирования 8. Привод линейных перемещений 9 каретки 3 по координате Y смонтирован на основании, а привод линейных перемещений 10 подвижного звена 5 по координате X - на каретке 3. Основание 1, каретка 3 и подвижное звено 5 образуют двухкоординатный горизонтальный стол, обеспечивающий возможность перемещения подвижного звена 5 с установленным на нем механизмом совмещения и позиционирования 8 по двум взаимно перпендикулярным направлениям.
Направляющие 2 и 4, в которых установлены каретка 3 и подвижное звено 5, конструктивно могут быть выполнены многодорожковыми с большим количеством шариков, разделенных сепараторами. При соответствующем выборе конструктивных и технологических параметров: жесткость каждой дорожки (желоба) упругие свойства основания и подложек дорожек, количество шариков и другие, можно обеспечить прямолинейность движения каретки и подвижного звена с точностью до ±0,05 мкм.
Механизм совмещения и позиционирования 8 закреплен на подвижном звене 5 посредством, по крайней мере, четырех упругих шарниров 6 и содержит подвижную нижнюю раму 11, платформу 12, подвижную верхнюю раму 13, предметный столик 14 и установленную на нем пластину 15, являющуюся выходным звеном механизма совмещения и позиционирования, функции которого может выполнять, например, фотошаблон с реперными знаками.
Подвижная нижняя рама 11 связана посредством упругих шарниров 16 с платформой 12, которая в свою очередь через упругие связи 17 взаимодействует с подвижной верхней рамой 13. Подвижная верхняя рама 13 посредством упругих шарниров 18 связана с предметным столиком 14.
Два привода линейных перемещений 19 и 20 по координатам X, Y механизма совмещения и позиционирования 8 установлены на подвижном звене 5 и связаны соответственно с платформой 12 и подвижной нижней рамой 11, а, по крайней мере, три привода линейных перемещений 21 по координате Z подвижной верхней рамы 13 установлены на платформе 12. Предметный столик 14 связан с двумя приводами угловых перемещений 22.
Устройство перемещения, совмещения и позиционирования работает следующим образом.
При включении приводов линейных перемещений 9 и 10 происходит перемещение каретки 3 относительно основания 1 и подвижного звена 5 относительно каретки 3 и, таким образом, координатный стол перемещает установленный на нем механизм совмещения и позиционирования 8 по координатам X, Y. При этом, в случае использования в составе приводов линейных перемещений, например, механизмов с гибкими звеньями, можно получить перемещение механизма совмещения и позиционирования с высокой точностью позиционирования до ±0,1 мкм на расстояниях ±100 мм.
При включении привода линейных перемещений 19 платформа 12 будет перемещаться в упругих шарнирах 16 относительно подвижной нижней рамы 11 в направлении оси X, а при включении привода линейных перемещений 20 предметный столик 14 вместе с платформой 12 и подвижной нижней рамой 11 будет перемещаться в направлении оси Y. Таким образом, при включении приводов линейных перемещений 19 и 20 предметный столик 14 вместе с пластиной 15 перемещается в горизонтальной плоскости XOY.
При одновременном включении приводов линейных перемещений 21 на подъем или опускание подвижная верхняя рама 13 вместе с предметным столиком 14 и пластиной 15 совершает перемещение по оси Z. При этом при подаче одинакового управляющего сигнала на приводы линейных перемещений 21 предметный столик с пластиной будет совершать плоскопараллельное движение вдоль оси Z. При одновременной подаче одинакового управляющего сигнала на приводы линейных перемещений 21 (Б) и 21 (В) на подъем, а на привод линейного перемещения 21 (А) на опускание произойдет поворот подвижной верхней рамы 13 вместе с предметным столиком 14 и пластиной 15 относительно оси OX. Если включить привод линейных перемещений 21 (А) на подъем, а приводы линейных перемещений 21 (Б) и 21 (В) на опускание, то произойдет разворот подвижной верхней рамы вместе с предметным столиком и пластиной в обратном направлении. Для поворота предметного столика с пластиной вокруг оси Y необходимо включить привод линейных перемещений 21 (Б) на подъем, а привод линейных перемещений 21 (В) на опускание при включенном приводе линейных перемещений 21 (А). При реверсе включения указанных приводов линейных перемещений произойдет поворот предметного столика вместе с пластиной относительно оси OY в обратном направлении.
Для поворота предметного столика 14 вместе с пластиной 15 относительно оси OZ необходимо включить приводы линейных перемещений 22, тогда предметный столик с пластиной будет поворачиваться в упругих шарнирах 18 относительно оси OZ. При реверсе включения приводов линейных перемещений 22 предметный столик с пластиной будет поворачиваться относительно оси OZ в обратном направлении.
Так как подвижные звенья в механизме совмещения и позиционирования жестко связаны между собой, а все подвижки осуществляются в упругих шарнирах, то происходит безлюфтовое перемещение предметного столика с пластиной по любому из указанных направлений.
Выполнение устройства перемещения, совмещения и позиционирования, согласно настоящему изобретению, обеспечивает широкий диапазон перемещений выходного звена устройства - пластины по координатам X, Y, Z и ее поворотов относительно осей OX, OY, OZ.
Изобретение относится к области измерительной техники. Устройство снабжено основанием, образующим с установленной на нем кареткой и с размещенным на каретке подвижным звеном двухкоординатный горизонтальный стол, приводами линейных перемещений каретки и подвижного звена. Механизм совмещения и позиционирования включает подвижную нижнюю раму, связанную посредством упругих шарниров с платформой, подвижную верхнюю раму, связанную с тремя приводами ее линейных перемещений по вертикали и предметным столиком. Приводы линейных перемещений по горизонтали механизма совмещения и позиционирования установлены на подвижном звене и связаны с нижней подвижной рамой и платформой. Приводы линейных перемещений по вертикали подвижной верхней рамы установлены на платформе, а предметный столик связан с приводами линейных перемещений по горизонтали, установленными с возможностью обеспечения его вращения относительно вертикальной оси. Изобретение направлено на расширение функциональных возможностей за счет перемещений выходного звена по шести степеням свободы. 2 ил.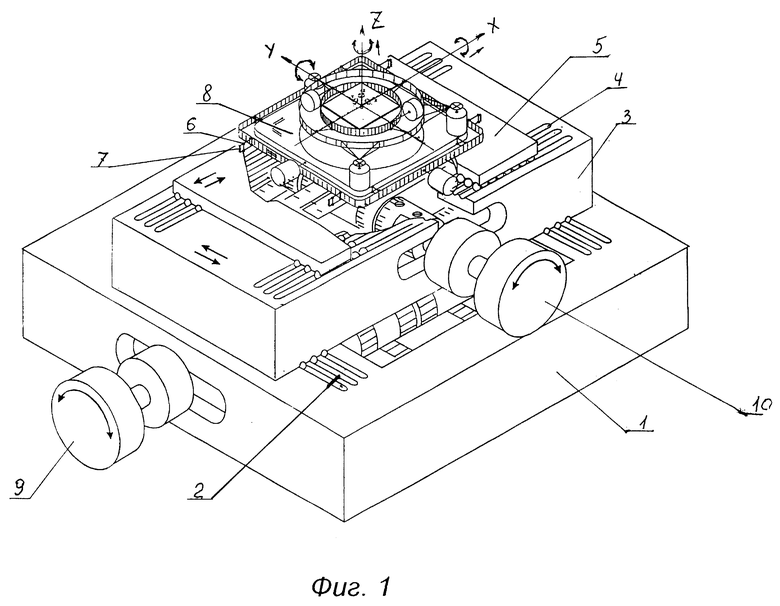
Устройство перемещения, совмещения и позиционирования, содержащее каретку, механизм совмещения и позиционирования, закрепленный на каретке посредством упругих опор, а также приводы линейных перемещений по горизонтали каретки и механизма совмещения и позиционирования, отличающееся тем, что оно снабжено подвижным звеном, которое размещено на каретке и имеет неподвижные стойки, приводом линейных перемещений подвижного звена по горизонтали и основанием, образующим с установленной на нем кареткой двухкоординатный горизонтальный стол, привод линейных перемещений каретки и привод подвижного звена установлены соответственно на основании и на каретке по двум взаимно перпендикулярным направлениям, механизм совмещения и позиционирования включает предметный столик, пластину, установленную на предметном столике, платформу, подвижную нижнюю раму, связанную посредством упругих шарниров с платформой, подвижную верхнюю раму, по крайней мере три привода линейных перемещений по вертикали, которые связаны с наружной стороны верхней рамой, которая связана с внутренней стороны с предметным столиком, механизм совмещения и позиционирования закреплен на подвижном звене двухкоординатного горизонтального стола посредством упругих шарниров, смонтированных в неподвижных стойках подвижного звена, приводы линейных перемещений по горизонтали механизма совмещения и позиционирования установлены на подвижном звене по двум взаимно перпендикулярным направлениям, связаны соответственно с нижней подвижной рамой и платформой, приводы линейных перемещений по вертикали верхней подвижной рамы установлены на платформе, а предметный столик связан с двумя приводами линейных перемещений по горизонтали, установленными с возможностью его вращения относительно вертикали.
| US 4575942 A, 18.03.1986 | |||
| Установочный стол | 1977 |
|
SU947914A1 |
| US 4118869 A, 10.10.1978 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

