Настоящее изобретение относится к приборостроению и измерительной технике и может быть использовано для сверхточных перемещений, в частности в устройствах проекционной аппаратуры уменьшенных изображений.
Сверхточный механизм перемещений требует решения, которое позволяет привести в соответствие с необходимой точностью жесткость исполнительных механизмов и особенно выходного звена привода.
Этим требованиям вполне могут удовлетворить механизмы перемещений с гибкими звеньями. В них полностью исключены высшие кинематические пары в последней исполнительной степени, а звенья, участвующие в передаче движений, могут быть напряжены до предельных характеристик.
Известен роликовый механизм перемещения с гибкими звеньями, содержащий корпус, подвижное звено и ролик, охваченный тремя гибкими звеньями, при этом концы верхнего гибкого звена закреплены на подвижном звене, а концы нижнего гибкого звена - на корпусе (а.с. SU N 1430990 A2, G 12 В 1/00, 26.03.86).
Недостатком данного механизма является относительная сложность, обусловленная наличием третьего гибкого звена, и ограниченный диапазон перемещений, обусловленный жестким креплением одних из концов гибких звеньев на ролике.
Наиболее близким к заявленному является механизм перемещения с гибкими звеньями, содержащий подвижный и неподвижный ползуны и два гибких звена, охватывающие валик и опорные ролики S-образной петлей, при этом концы гибких звеньев жесткого закреплены на соответствующем ползуне (а.с. SU N 1439686 A1, G 12 В 5/00, 9/10, 30.07.86).
Недостатком данного устройства является относительная сложность механизма, обусловленная наличием опорных роликов, и увеличенные силы трения, определяемые наличием распорных внутренних сил между валиком, роликами и ползунами, что уменьшает точность позиционирования подвижного ползуна.
Задачей, на решение которой направлено заявленное изобретение, является создание механизма перемещения с гибкими звеньями, который бы обеспечивал технический результат, связанный с упрощением конструкции механизма и повышением точности позиционирования подвижного звена.
Указанная задача в заявленном устройстве в первом варианте его осуществления решается за счет того, что в механизме перемещения с гибкими звеньями, содержащем неподвижный корпус, подвижное звено и валик, охваченный гибкими звеньями и установленный с возможностью линейных перемещений перпендикулярно его оси, при этом концы одних гибких звеньев жестко закреплены на корпусе, концы других гибких звеньев - на подвижном звене, а гибкие звенья натянуты, корпус снабжен направляющими, взаимодействующими с подвижным звеном, расположенным над валиком, а гибкие звенья охватывают валик по всей длине окружности его сечения, при этом закрепленные на корпусе и на подвижном звене концы гибких звеньев расположены соответственно по разные стороны относительно оси валика.
Указанная задача в заявленном устройстве во втором варианте его осуществления решается за счет того, что в механизме перемещения с гибкими звеньями подвижное звено установлено в направляющих, расположенных снаружи корпуса, и размещено под валиком, гибкие звенья охватывают валик по всей длине окружности его сечения, а закрепленные на корпусе и на подвижном звене концы гибких звеньев расположены по одну сторону относительно оси валика.
Кроме того, в частных случаях выполнения механизма перемещения с гибкими звеньями в обоих вариантах его осуществления валик в продольном сечении выполнен ступенчатой формы.
Сущность изобретения поясняется чертежами, где: на фиг. 1 представлен общий вид механизма в первом варианте его выполнения; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Г-Г на фиг. 2; на фиг. 4 - общий вид механизма в первом варианте его выполнения с валиком ступенчатой формы; на фиг. 5 - вид по стрелке А на фиг. 4; на фиг. 6 - расчетная схема механизма при расположении концов гибких звеньев по разные стороны относительно оси валика, выполненного в продольном сечении ступенчатой формы; на фиг. 7 - расчетная схема механизма при расположении концов гибких звеньев по одну сторону относительно оси валика, выполненного в продольном сечении ступенчатой формы.
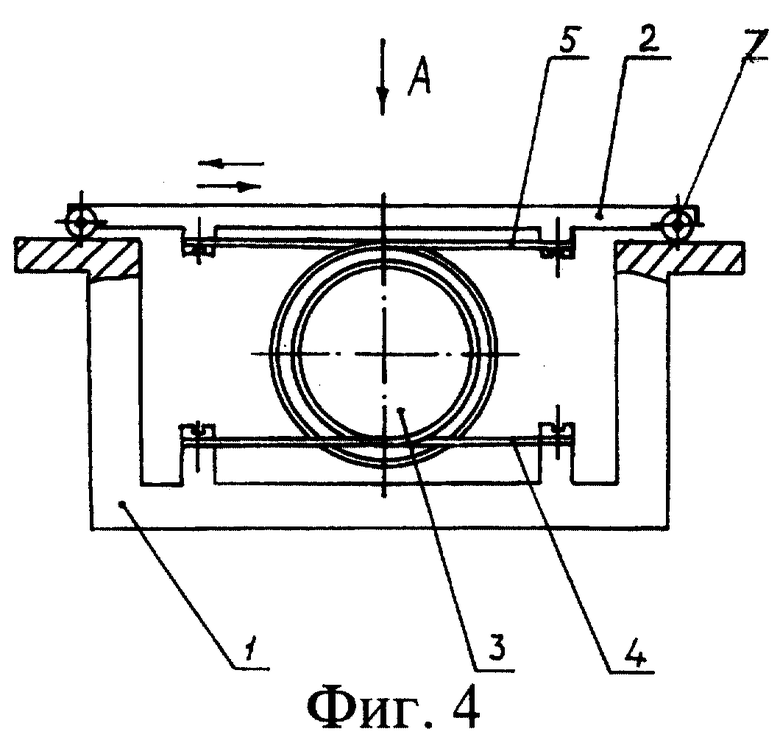
Механизм перемещения с гибкими звеньями содержит неподвижный корпус 1, подвижное звено 2, валик 3, гибкие звенья 4 и гибкое звено 5, охватывающие валик 3 по всей длине окружности его сечения. Концы гибких звеньев 4 жестко закреплены на корпусе 1, а концы гибкого звена 5 жестко закреплены на подвижном звене 2.
В первом варианте выполнения механизма (фиг. 1, 2, 6) на корпусе 1 в верхней его части установлены направляющие 7, например, роликового типа, которые взаимодействуют с подвижным звеном 2, обуславливая возможность его перемещения относительно корпуса 1. Подвижное звено 2 установлено в верхней части корпуса 1 над валиком 3, а концы гибких звеньев 4 и гибкого звена 5 расположены по разные стороны относительно оси О-О валика 3.
Во втором варианте выполнения механизма (фиг. 7) подвижное звено 2 установлено в направляющих 7, расположенных снаружи нижней части корпуса 1, а концы гибких звеньев 4 и гибкого звена 5 расположены по одну сторону относительно оси О-О валика 3.
В обоих вариантах выполнения механизма валик 3 в продольном сечении может быть выполнен ступенчатой формы (фиг. 4, 5, 7).
Механизм перемещения с гибкими звеньями работает следующим образом.
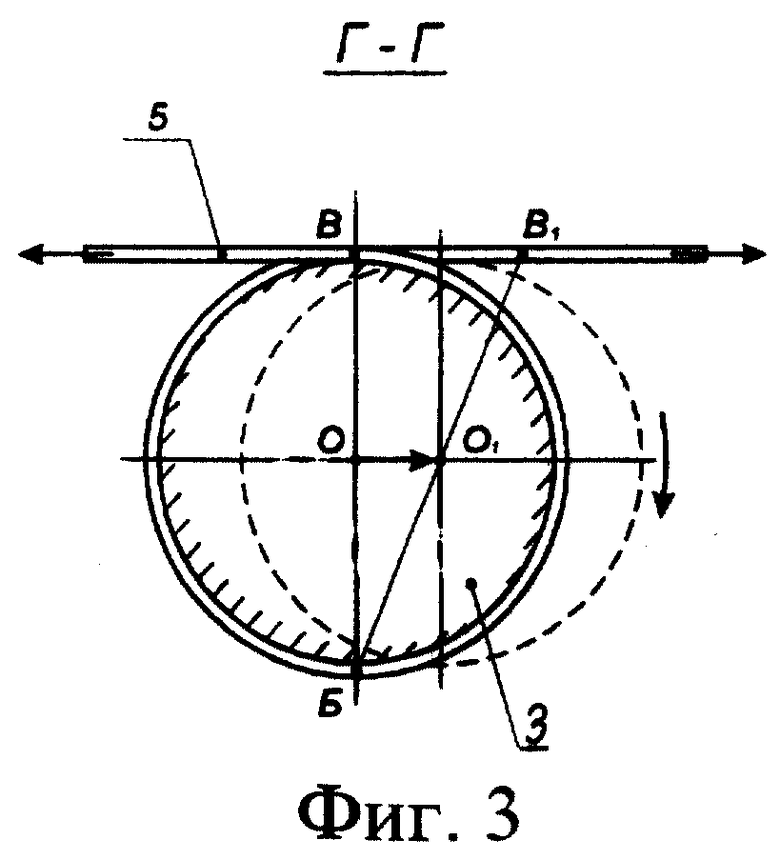
Гибкие звенья 4 и 5 предварительно натянуты определенным усилием. При вращении валика 3 он перекатывается по гибким звеньям 4 относительно корпуса 1. Гибкое звено 5, охватывающее валик 3 со стороны, противоположной стороне охвата валика 3 гибкими звеньями 4, перекатывается без проскальзывания относительно валика 3 и перемещает связанное с ним подвижное звено 2. Точка Б (фиг. 1, 3, 6, 7) является мгновенным центром скоростей валика 3. При перекатывании валика 3 его центр О перемещается из точки О в точку О1, а точка В в точку В1.
В первом варианте выполнения механизма перемещения (фиг. 1, 3) перемещение подвижного звена 2 (отрезок BB1) будет в два раза больше, чем перемещение центра О валика 3 (отрезок ОО1), поскольку расстояние между точками Б и В в два раза больше расстояния между точками Б и О. Таким образом, при минимальном диаметре валика 3, величина которого определяется допустимыми напряжениями в гибких звеньях, возможно получение удвоенного перемещения подвижного звена 2.
Во втором варианте выполнения механизма перемещения (фиг. 7) подвижное звено 2 перемещается в сторону, противоположную перемещению центра О валика 3, что обуславливает возможность получения величин перемещений подвижного звена 2 (отрезок ВВ1) на несколько порядков меньше, чем при первом варианте выполнения механизма.
Выполнение валика 3 ступенчатой формы в продольном сечении (фиг. 6, 7) в обоих вариантах выполнения механизма перемещений позволяет расширить диапазон перемещений подвижного звена 2.
В этом случае величина перемещения подвижного звена ΔL (отрезок ВВ1) в миллиметрах определяется из соотношения:
где α - угол поворота валика, в градусах;
R1, R2 - радиусы ступеней валика, в мм;
a1, a2 - толщины гибкого звена 5 и гибких звеньев 4, в мм.
При этом, если концы гибких звеньев 4 и гибкого звена 5 расположены по разные стороны относительно оси валика, в формуле берется знак "+", если по одну сторону, то знак "-".
При закреплении концов гибких звеньев по одну или разные стороны относительно оси валика можно получить величины перемещений подвижного звена, отличающиеся на несколько порядков.
Например, при радиусах ступеней валика R1 = 25,1 мм, R2 = 25 мм, толщине гибких звеньев a1 = a2 = 0,1 мм, угле поворота валика α = 1o величины перемещения подвижного звена ΔL1 и ΔL2 для случаев закрепления концов гибких звеньев по разные стороны или по одну относительно оси валика будут соответственно равны:

т.е. ΔL2 в ≈ 500 раз меньше, чем ΔL1.
Во всех случаях выполнения механизм перемещения может передавать движение как от валика 3 к подвижному звену 2, так и от подвижного звена к валику - в обратном направлении. Замкнутые линии охвата валика гибкими звеньями с концами, вытянутыми в одну прямую линию, не создают дополнительных усилий, а следовательно, и сил трения между валиком 3 и корпусом 1, что повышает точность позиционирования подвижного звена 2. Если гибкие звенья выполнены из тросиков (нитей), то достаточно охватить валик каждым гибким звеном один раз. Если гибкие звенья выполнены из ленты, то они могут быть дополнительно жестко закреплены на валике и тогда для увеличения перемещения подвижного звена возможна намотка двух или более витков гибких лент на валик, однако, в этом случае зависимость перемещения подвижного звена будет нелинейной.
Выполнение механизма перемещения с охватом валика гибкими звеньями по всей длине окружности его сечения с образованием концов, вытянутых в одну линию, и расположением концов гибких звеньев по одну или разные стороны относительно оси валика позволяет при простой конструкции механизма расширить диапазон перемещений подвижного звена с высокой точностью его позиционирования.




Изобретение относится к приборостроению и измерительной технике. Механизм содержит подвижное звено, которое установлено в направляющих, расположенных на корпусе валик, гибкие звенья, которые охватывают валик по всей длине окружности его сечения. Валик может быть выполнен ступенчатой формы в продольном сечении и расположен под подвижным звеном. Концы гибких звеньев, закрепленные на корпусе и на подвижном звене, могут быть расположены соответственно по одну или разные стороны относительно оси валика. В варианте выполнения подвижное звено установлено вне корпуса, а валик расположен над подвижным звеном. Изобретение направлено на упрощение конструкции и повышение точности позиционирования подвижного звена. 2 с. и 2 з.п. ф-лы, 7 ил.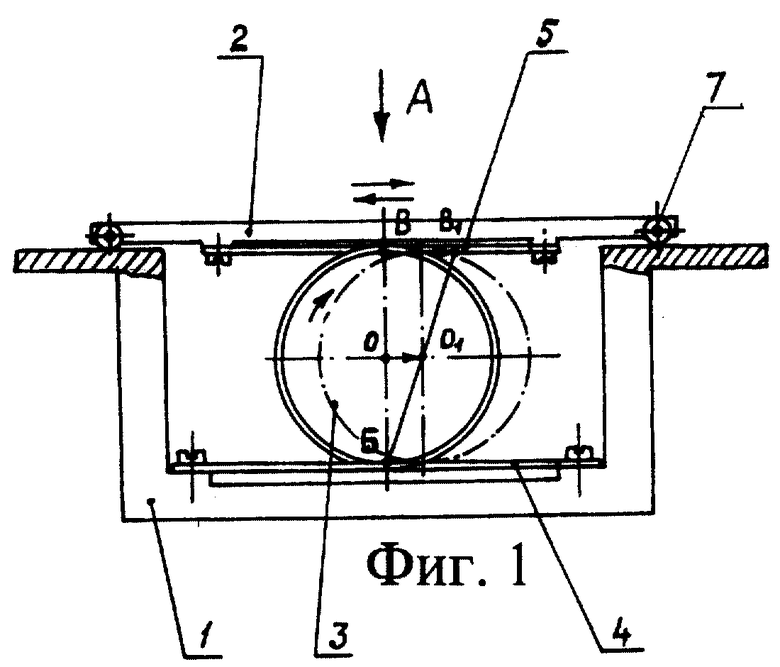
| Механизм перемещения с гибкими звеньями | 1986 |
|
SU1439686A1 |
| Механизм перемещения с гибкими звеньями | 1991 |
|
SU1823008A1 |
| US 5563485 A, 08.10.1996 | |||
| Способ определения метгемоглобинредуктазной активности эритроцитов | 1984 |
|
SU1302196A1 |
| DE 4338155 A, 04.05.1995. | |||

