Изобретение относится к роботизированным комплексам с манипуляторам для перемещения продуктов с одного места на другое и может использоваться для перемещения продукции подвесного размещения от рабочего стола оператора на тележки [B25J 5/00, B25J 5/02, B25J 9/00, B25J 9/06, B25J 11/00, B65G 47/36, B65G 65/02, B21D 43/00].
Из уровня техники известно РОБОТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ПАЛЛЕТИРОВАНИЯ ГРУЗОВ [RU220278, опубликовано: 05.09.2023], включающее оборудование для зоны разгрузки паллетированной продукции, накопитель для прокладочных материалов, управляемое устройство с рабочими схватами для зоны позиционирования груза и паллетов, отличающееся тем, что в основании роботизированного устройства для паллетирования грузов лежит пространственная силовая рама, на которой при помощи крепежных элементов установлены направляющие, система контроля и управления линейным перемещением управляемого устройства с рабочими схватами и паллетов и выдвижной накопитель для прокладочных материалов, оборудование для зоны загрузки паллетированной продукции представляет собой выдвижные упоры, установленные на внешней стороне пространственной силовой рамы, а накопитель для прокладочных материалов представляет собой конструкцию, выполненную с возможностью задвижения в корпус, включающую металлическую раму с ложементами для установки прокладочных материалов, при этом на ложаментах установлены телескопические задвижные направляющие.
Известно УСТРОЙСТВО ПОДАЧИ И РАЗГРУЗКИ ПОДВЕСНОГО ИНСТРУМЕНТА [CN219928808U, опубликовано: 31.10.2023], включающее в себя механизм загрузки и механизм разгрузки, который включает узел изменения расстояния загрузки, первый узел перемещения, первый узел разборки и сборки и узел позиционирования загрузки, узел изменения погрузочного расстояния и первый узел разборки и сборки расположены на первом узле перемещения механизма загрузки на соседних сторонах, а узел изменения расстояния загрузки и узел позиционирования загрузки расположены на одной и той же стороне первого узла перемещения с рядом расположенными узлом позиционирования загрузки и первого узла разборки и сборки, механизм разгрузки включает в себя узел изменения расстояния разгрузки, второй узел перемещения, второй узел разборки и сборки и узел выгрузки, узел изменения расстояния разгрузки и второй узел разборки и сборки расположены на втором узле перемещения, а узел изменения расстояния разгрузки и узел выгрузки расположены на одной стороне второго узла перемещения, а узел выгрузки и второй узел разборки и сборки расположены рядом.
Известна СИСТЕМА ДЛЯ БЫСТРОГО И ЭФФЕКТИВНОГО ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ С ПЕРВОЙ СТАНЦИИ НА ВТОРУЮ СТАНЦИЮ [US5423648A, опубликовано: 13.06.1995], которая содержит опорную конструкцию, смещенную горизонтально от пути потока; робот, включающий основание, установленное на опорной конструкции, и включающий узел руки, шарнирно поддерживаемый проксимально от первого конца узла руки с возможностью поворота вокруг и под по существу горизонтальной первой осью, приспособленной для расположения над первой и второй рабочими станциями и между ними, так что узел рычага способен качаться, как маятник, между первой рабочей станцией и второй рабочей станцией вокруг первой оси, при этом первая ось расположена в вертикальной плоскости, пересекающей путь потока проксимальнее средней точки пути потока между двумя рабочие места; и концевой эффектор, установленный на узле рычага, причем узел рычага включает в себя первое четырехрычажное рычажное соединение, шарнирно соединенное с основанием на первой оси, и второе четырехрычажное рычажное соединение, шарнирно соединенное с первым четырехрычажным рычажным механизмом с возможностью вращения вокруг по существу вертикальная вторая ось, при этом вторая ось пересекает первую ось, когда узел рычага расположен по существу в вертикальном положении, при этом указанное вертикальное положение может быть расположено на половине расстояния между первым и вторым рабочими станциями и, по меньшей мере, на части второго рычажный механизм шарнирно соединен с возможностью вращения вокруг третьей оси, причем указанная третья ось лежит в плоскости, по существу ортогональной второй оси.
Основной технической проблемой аналогов является низкая эффективность защиты персонала, обеспечивающего коллаборацию человека и робота в их совместной работе, обусловленная отсутствием конструктивных решений по обеспечению безопасности, слабая автоматизация процессов перемещения продукции подвесного размещения, обусловленная отсутствием конструктивных решений, обеспечивающих размещение продукции подвесного размещения в рабочих зонах, обеспечивающих получение информации (сигналов) функциональной части - роботизированной, о наличии/отсутствии в зоне погрузки/выгрузки продукции, степени загруженности этих зон.
Задача изобретения состоит в устранении создании функционального и безопасного для работы человека, окружающего оборудования и продукции коллаборативного роботизированного комплекса для перемещения продукции подвесного размещения.
Технический результат изобретения заключается в обеспечении возможности создания безопасного коллаборативного роботизированного комплекса для перемещения продукции подвесного размещения, в повышении функциональных свойств технологического оборудования, а также в расширении арсенала технических средств для автоматизации перемещения продукции подвесного размещения.
Указанный технический результат достигается за счет того, что коллаборативный роботизированный комплекс для перемещения продукции подвесного размещения, включающий в себя манипулятор, выполненный в виде механической руки из шарнирно соединенных между собой звеньев, на головке манипулятора смонтирован захватный инструмент, выполненный с возможностью захвата и удержания штанги с подвешенным на штанге продуктом при перемещении штанги с продуктом из зоны захвата в зону погрузки, при этом в зоне захвата для размещения штанги с подвешенным продуктом смонтирован предметный стол, выполненный с возможностью размещения и удержания штанги с подвешенным продуктом, а в зоне погрузки для размещения штанги с подвешенным продуктом, перемещаемой манипулятором, расположено подвижное средство накопления продукции, манипулятор, предметный стол и средство накопления функционально связаны между собой таким образом, что манипулятор осуществляет перемещение штанги с продукцией на средство перемещения по сигналам, поступающих на контроллер манипулятора от датчиков о наличии штанги с продукцией в зоне захвата, о наличии средства накопления в зоне погрузки, рабочая зона манипулятора ограничена защитным ограждением с возможностью ограничения доступа в зону работу манипулятора, обеспечивающего безопасность технологических процессов для человека, окружающего комплекс оборудования объекта, где установлен комплекс, самого комплекса и перемещаемой продукции, при этом ограждение содержит проемы для выделения зоны захвата и размещения в ней предметного стола и перемещения в зону погрузки и обратно средства накопления продукции, комплекс снабжен датчиками безопасности, подключенными к контроллеру манипулятора и выполненными с возможностью контроля за отсутствием в зоне работы манипулятора людей.
В частности, манипулятор снабжен модулем технического зрения.
В частности, захват манипулятора выполнен в виде двухзубчатой вилки.
В частности, манипулятор размещен напольно, подвесным способом, в том числе на подвижной платформе.
В частности, платформа манипулятора снабжена средствами горизонтального и/или вертикального перемещения.
В частности, предметный стол выполнен в виде стоек или упоров.
В частности, подвижное средство накопления выполнено в виде тележки.
В частности, зона погрузки содержит упоры для подвижного средства накопления с возможностью обеспечения устойчивости положения этого средства.
В частности, комплекс снабжен средствами сигнализации с возможностью оповещения оператора о присутствии средства накопления в зоне погрузки, о необходимости замены средства накопления, о работе манипулятора в зонах захвата и погрузки.
В частности, датчики безопасности выполнены в виде фотобарьеров.
Краткое описание чертежей.
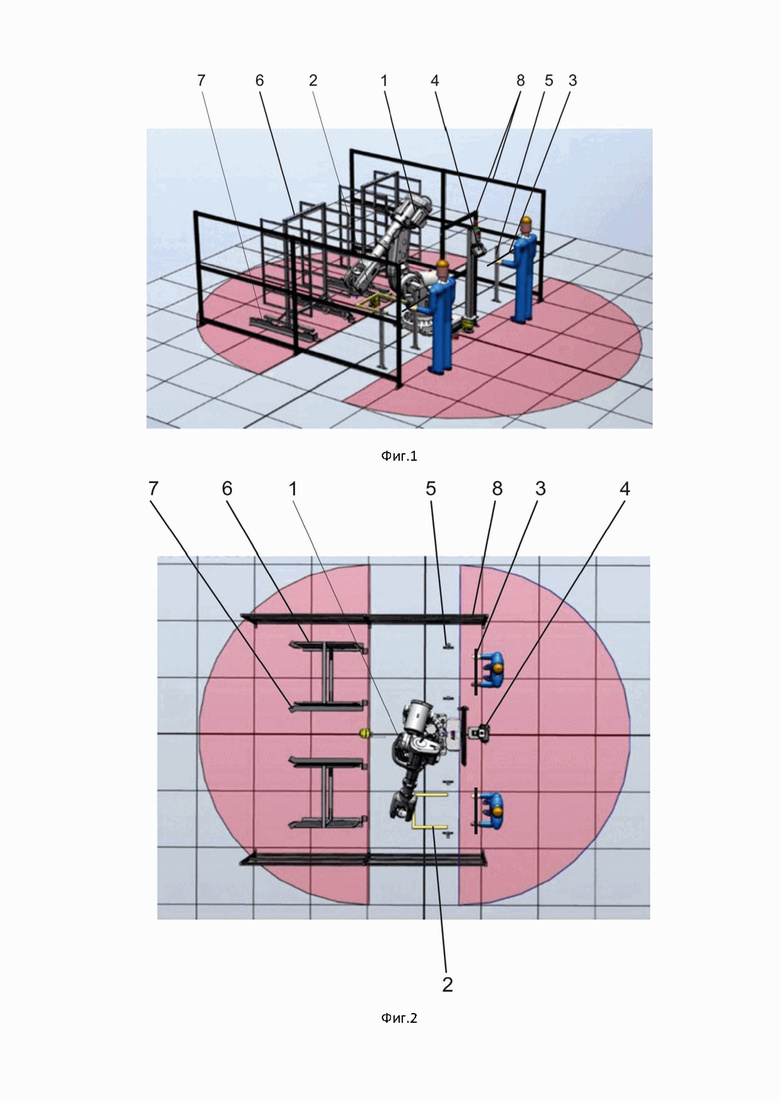
На фиг. 1 показан упрощенный общий вид коллаборативного роботизированного комплекса для перемещения продукции подвесного размещения.
На фиг. 2 показан упрощенный вид сверху коллаборативного роботизированного комплекса для перемещения продукции подвесного размещения.
На фигурах обозначено: 1 - манипулятор, 2 - захват, 3 - штанга, 4 - пульт управления, 5 - предметный стол, 6 - тележка, 7 - упоры, 8 - ограждение.
Осуществление изобретения.
Заявленное изобретение представляет собой коллаборативный роботизированный комплекс для приема от оператора из зоны захвата и перемещения в зону погрузки на тележки продукции, подвесного размещения.
Подвесное размещение продукции предполагает использование штанги, которая может быть снабжена крюками, вешалами и другими приспособлениями, на которых подвешивают товары, например, пищевой продукции (колбасы, сосиски, рыба), текстильной продукции (ткани, меха) и т.д. Подвешивание продукции на штанге может выполняться непосредственно на штангу путем продевания штанги в кольца подвесов, которыми может быть снабжен продукт или непосредственно надеванием продукта, имеющего для этого отверстие на штангу.
Коллаборативный роботизированный комплекс для перемещения продукции подвесного размещения (см.Фиг.1, 2) включает в себя манипулятор 1, выполненный в виде механической руки из шарнирно соединенных между собой звеньев (элементов). Шарнирные соединения элементов механической руки снабжены сервоприводами. Манипулятор 1 выполнен, как минимум, c четырьмя степенями свободы.
Манипулятор 1 снабжен захватным инструментом - захватом 2, смонтированным на головке манипулятора 1. На захвате 2 или на головке манипулятора 1 или стационарно на коллаборативном комплексе смонтирован, как минимум, один модуль технического зрения (на фигурах не показан), выполненный, например, в виде сенсорных датчиков или цифровой камеры. Модуль технического зрения выполнен с возможностью захвата объектов в зоне работы манипулятора 1 и их распознания по запрограммированному алгоритму известными способами.
Захват 2 манипулятора 1 выполнен в виде двухзубчатой вилки, снабженной схватами или магнитами, например, электрическими, с возможностью захвата и удержания штанги 3 с размещенной на ней продукцией подвесного размещения по ее, например, концам.
Управление манипулятором 1 осуществляется автоматически с помощью контроллера по запрограммированному в нем алгоритму, вручную оператором с помощью пульта управления 4, подключенного к контроллеру или комплексно.
Манипулятор 1 может быть размещен напольно, подвесным способом, в том числе на подвижной платформе (на фигурах не показана). Платформа может быть снабжена средствами горизонтального и/или вертикального перемещения.
Комплекс содержит в зоне захвата, по крайнее мере, один предметный стол 5 для размещения на нем штанги 3 с продукцией подвесного размещения и находящийся в зоне доступа захвата 2 манипулятора 1. В одном из вариантов реализации комплекс может содержать несколько предметных столов 5, каждый из которых находится в зоне доступа захвата 2 манипулятора 1.
Предметный стол 5 выполнен с возможностью обеспечения взаимодействия захвата 2 манипулятора 1 со штангой 3. В одном из вариантов реализации упомянутый предметный стол 5 может быть выполнен в виде пары симметричных вертикальных стоек с упорами на их верхних торцах для расположения на этих упорах штанги 3 и ее устойчивого размещения в том числе в момент взаимодействия захвата 2 с этой штангой 3.
Комплекс содержит в зоне погрузки подвижное средство накопления продукции подвесного размещения, выполненное в виде подвижной тележки 6, одно- или многоярусной, располагаемую в зоне доступности захвата 2 манипулятора 1 для размещения на ней перемещаемой с помощью манипулятора 1 с предметного стола 5 штанги 3 с подвешенной продукцией.
Комплекс может содержать одну тележку 6 на один предметный стол 5, одну тележку 6 на несколько предметных столов 5.
Тележка 6 выполнена подвижной и снабжены роликами или колесами.
Комплекс для устойчивости положения тележки 6 в зоне погрузки на нее штанги 3 с продукцией снабжен упорами 7 или направляющими.
Манипулятор 1, предметный стол 5 и тележка 6 функционально связаны между собой таким образом, что манипулятор 1 осуществляет перемещение штанги 3 с продукцией из зоны захвата в зону погрузки на тележку 6. Функциональная связь может быть обеспечена с помощью датчиков, подающих соответствующие управляющие сигналы в контроллер манипулятора 1, например, от датчиков, смонтированных на предметном столе 5, о наличии на предметном столе 5 штанги 3 с продукцией, на упорах 7 - о наличии тележки 6, с контроллера манипулятора 1 - о количестве перемещенных штанг 3 на одну тележку 6, зависящем о количестве мест для штанг 3 на тележке 6. Кроме того, функциональная связь может быть обеспечена с помощью модуля технического зрения манипулятора 1 (при его наличии), который определяет наличие штанги 3 с продукцией на предметном столике 5, наличие тележки 6 в зоне погрузки, наличие в тележке 6 свободных мест для штанг 3 с продукцией.
Кроме того, упомянутые датчики связаны со средствами сигнализации (оповещения) работающего совместно с манипулятором 1. Упомянутые средства сигнализации выполнены с возможностью оповещения оператора о присутствии тележки 6 в зоне погрузки, о необходимости замены тележки 6, о работе манипулятора 1 по загрузке тележки 6. Средства сигнализации могут быть выполнены в виде светофора, при этом, в качестве примера, желтый свет светофора может оповещать оператора о присутствии тележки 6 в зоне погрузки, зеленый - о загрузке тележки 6 и необходимости ее замены, красный - в зоне тележки работает робот - идет загрузка.
Упомянутые выше датчики могут быть выполнены контактными, оптическими, лазерными, весовыми и т.д.
Комплекс снабжен защитным ограждением 8, выполненным с возможностью ограничения доступа в зону работу манипулятора 1, обеспечивающего безопасность технологических процессов для человека, окружающего комплекс оборудования объекта, где установлен комплекс, самого комплекса и перемещаемой продукции. Упомянутое ограждение 8 содержит проходы (проемы) для размещения в, по крайней мере, в одном из проемов предметного стола 5 и перемещения через упомянутый проем в зону погрузки и обратно тележки 6.
Комплекс снабжен средствами сигнализации (оповещения), выполненными с возможностью оповещения оператора о присутствии тележки 6 в зоне погрузки, о необходимости замены тележки 6, о работе манипулятора 1 по загрузке тележки 6. Средства сигнализации могут быть выполнены в виде светофоров, по одному для каждой из тележек 6, при этом в одном из вариантов реализации светофора, желтый свет светофора оповещает о присутствия тележки 6 в зоне погрузки, зеленый - тележка 6 загружена, красный - в зонах захвата и погрузки работает робот (идет загрузка).
Комплекс снабжен датчиками безопасности, выполненными в виде, например, оптических датчиков (сканеров) с возможностью контроля за отсутствием в зоне работы манипулятора 1 людей. Датчики безопасности подключены к контроллеру и смонтированы в ограждении 8 (опорах ограждения 8) по обе стороны от приборного стола 5, а также, как вариант, в ограждении 8 (опорах ограждения) проема подачи тележки 6.
В одном из вариантов реализации упомянутые датчики безопасности могут быть выполнены в виде фотобарьеров. Из уровня техники известно, что фотоэлектрические барьеры (оптобарьеры, световые завесы безопасности) - это оптоэлектронные приборы, состоящие из многолучевого источника инфракрасного излучения и приемника. Инфракрасный световой поток от излучателя попадает в приемник, создавая неосязаемую область контроля. Защищенная зона находится между излучателем и приемником.
Датчики безопасности обнаруживают появление посторонних непрозрачных объектов (человека) в контролируемой зоне и передают управляющий сигнал в контроллер комплекса. Контроллер либо посылает сигнал об остановке манипулятора 1 до устранения помех в зоне контроля, либо выдает тревожный сигнал в случае невозможности быстрой остановки опасного технологического процесса.
Коллаборативный роботизированный комплекс для перемещения продукции подвесного размещения работает следующим образом.
Оператор выбирает схему навески продукции на тележку 6 с помощью пульта управления 4. Схема навески может быть заранее запрограммирована в контроллере.
Оператор закатывает пустую тележку 6 на упоры 7, на пульте управления 4 подтверждает загрузку новой тележки 6, при этом тележка 6 на упорах фиксируется зажимами и контролируется датчиками.
Оператор забирает, например, с технологической линии или оборудования или специального доставляемую другим способом, продукцию и подвешивает ее на штангу 3. Например, для производства колбасных изделий, таким технологическим оборудованием может быть машина набивки колбасных изделий, а может быть транспортер, подающий колбасные изделия от машины набивки. Основным условием безопасности оператора при его работе является взаимное размещение технологического оборудования и манипулятора 1, при котором зоны работы оператора у технологического оборудования и комплекса не должны пересекаться. Это учитывают при программировании работы манипулятора 1.
После заполнения штанги 3 продукцией оператор размещает штангу 3 с продукцией на предметном столе 5 и переходит выходит в безопасную зону (обозначена заливкой на фиг. 1-3). Контроль выхода оператора из зоны работы манипулятора 1 осуществляется с датчиков безопасности.
По сигналу от датчика с приборного стола 5 о наличии на нем штанги 3 с продукцией и после разрешения от контроллера (оператор покинул опасную зону работы манипулятора 1) манипулятор 1 с помощью захвата 2 забирает штангу 3 с продукцией и размещает ее на тележке 6 в соответствии со схемой размещения. В этом время средства сигнализации оповещают о ходе процесса как описано ранее.
После заполнения всех мест на тележке 6 штангами 3 с продукцией, манипулятор 1 прекращает работу, а тележка 6 заменяется оператором, при этом при извлечении тележки 6 с упоров 7 и установке новой тележки 6 срабатывают датчики, которые передают в контроллер соответствующие сигналы. После получения сигнала о наличии тележки 6 манипулятор 1 включается в работу или при наличии второй тележки 6 переходит к ее наполнению.
В варианте реализации нескольких мест для перемещения подвесной продукции, характеризующейся количеством предметных столов 5 и/или количеством тележек 6, манипулятор 1 может быть запрограммирован различными способами, например, для чередующегося перемещения продукции с каждого предметного стола 5 на одну тележку 6, или с одного предметного стола 5 на несколько тележек 6, или сначала с одного предметного стола 5 на тележку 6 до ее заполнения, а затем перехода для перемещения со следующего предметного стола 5 на одну или несколько тележек 6.
Технический результат - обеспечение возможности создания безопасного коллаборативного роботизированного комплекса для перемещения продукции подвесного размещения достигается за счет обеспечения конструктивной и функциональной взаимосвязи между собой манипулятора 1, предметного стола 5 и тележки 6 с помощью датчиков, сигнализирующих о наличии в зоне захвата на предметном столе 5 штанги 3 с продукцией, о наличии в зоне загрузки тележки 6, датчиков безопасности, подающих сигналы о наличии/отсутствии человека в зоне работы манипулятора 1 при этом датчики в свою очередь связаны конструктивно и функционально с контролером манипулятора 1 для остановки работы манипулятора 1 или подачи тревожного сигнала в случае появления помехи в зоне работы манипулятора 1 и со средствами сигнализации (оповещения), оповещающих о наличии тележки 6 в зоне погрузки, о необходимости замены тележки 6, о работе манипулятора 1 в зонах захвата и загрузки, которые в свою очередь являются управляющими сигналами для контроллера манипулятора 1 и дополнительно за счет ограничения зоны работы манипулятора 1 защитным ограждением 8 для ограничения доступа внутрь этой зоны человека, обеспечивающего в свою очередь безопасность технологических процессов для человека, окружающего комплекс оборудования объекта, где установлен комплекс, самого комплекса и перемещаемой продукции.
Изобретение относится к области коллаборативных роботизированных комплексов для перемещения продукции подвесного размещения. Комплекс содержит манипулятор с контроллером, средство накопления продукции, расположенное в рабочей зоне манипулятора с возможностью передачи на нее посредством манипулятора перемещаемой продукции, при этом он снабжен по меньшей мере одним предметным столом, выполненным с возможностью размещения и удержания штанги с подвешенной продукцией, подлежащей перемещению, и установленным в рабочей зоне манипулятора, причем средство накопления продукции выполнено подвижным, а захватный инструмент манипулятора выполнен с возможностью захвата и удержания штанги с подвешенной на ней продукцией при перемещении штанги из зоны захвата в зону погрузки на средство накопления. Упомянутый предметный стол оснащен датчиками наличия на нем штанги с продукцией, зона погрузки оснащена датчиками наличия в ней подвижного средства накопления, а указанные датчики связаны с контроллером манипулятора. Использование изобретения позволяет повысить безопасность комплекса и расширить его технологические возможности. 10 з.п. ф-лы, 2 ил.
1. Коллаборативный роботизированный комплекс для перемещения продукции подвесного размещения, содержащий манипулятор, выполненный в виде механической руки, состоящей из шарнирно соединенных между собой звеньев и головки манипулятора с захватным инструментом, и имеющий контроллер манипулятора, средство накопления продукции, расположенное в рабочей зоне манипулятора с возможностью передачи на нее посредством манипулятора перемещаемой продукции, отличающийся тем, что он снабжен по меньшей мере одним предметным столом, выполненным с возможностью размещения и удержания штанги с подвешенной продукцией, подлежащей перемещению, и установленным в зоне захвата рабочей зоны манипулятора, причем средство накопления продукции выполнено подвижным, а захватный инструмент манипулятора выполнен с возможностью захвата и удержания штанги с подвешенной на ней продукцией при перемещении штанги из зоны захвата в зону погрузки на средство накопления, при этом упомянутый предметный стол оснащен датчиками наличия на нем штанги с продукцией, зона погрузки оснащена датчиками наличия в ней подвижного средства накопления, а указанные датчики связаны с контроллером манипулятора.
2. Комплекс по п. 1, отличающийся тем, что манипулятор снабжен модулем технического зрения.
3. Комплекс по п. 1, отличающийся тем, что захват манипулятора выполнен в виде двухзубчатой вилки.
4. Комплекс по п. 1, отличающийся тем, что манипулятор размещен напольно или подвесным способом, в том числе на подвижной платформе.
5. Комплекс по п. 4, отличающийся тем, что платформа манипулятора снабжена средствами горизонтального и/или вертикального перемещения.
6. Комплекс по п. 1, отличающийся тем, что предметный стол выполнен в виде стоек или упоров.
7. Комплекс по п. 1, отличающийся тем, что подвижное средство накопления выполнено в виде тележки.
8. Комплекс по п. 1, отличающийся тем, что в зоне погрузки установлены упоры для подвижного средства накопления с возможностью обеспечения устойчивости положения этого средства.
9. Комплекс по п. 1, отличающийся тем, что он снабжен защитным ограждением, выполненным с возможностью ограничения доступа персонала в рабочую зону манипулятора, при этом защитное ограждение выполнено с соответствующими проемами для выделения зоны захвата продукции и перемещения в зону погрузки и обратно средства накопления продукции и снабжено датчиками безопасности, подключенными к контроллеру манипулятора с возможностью контроля за отсутствием персонала в рабочей зоне манипулятора.
10. Комплекс по п. 9, отличающийся тем, что датчики безопасности выполнены в виде фотобарьеров.
11. Комплекс по п. 1, отличающийся тем, что он снабжен средствами сигнализации с возможностью оповещения оператора о присутствии средства накопления в зоне погрузки, о необходимости замены средства накопления, о работе манипулятора в зонах захвата и погрузки.
| МОДУЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПАЛЛЕТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 2021 |
|
RU2783555C1 |
| КОЛЛАБОРАТИВНЫЙ СВАРОЧНЫЙ АППАРАТ | 2022 |
|
RU2789145C1 |
| КОЛЛАБОРАТИВНАЯ СБОРОЧНО-ПРОИЗВОДСТВЕННАЯ ЛИНИЯ | 2020 |
|
RU2771901C2 |
| АВТОНОМНАЯ СБОРОЧНАЯ МОДУЛЬНАЯ ЯЧЕЙКА | 2021 |
|
RU2755994C1 |
| CN 108582025 A, 28.09.2018. | |||

