Изобретение относится к механизированным устройствам (поворотным столам) с пятью степенями свободы для фиксации и перемещения исследуемых объектов (изделий) произвольной формы в пространстве, и может применяться для проведения широкого спектра работ, как в специализированных защитных боксах (камерах), так и на открытом воздухе: исследование поверхностей деталей (изделий) различной геометрической формы методами количественной металлографии (фрактографии), создание трехмерных моделей деталей (изделий) сложной геометрии с применением технологии 3D сканирования, а также нанесение различных покрытий (окрашивание) на поверхности деталей (изделий) различной геометрической формы.
В настоящее время для получения, с минимальными производственными затратами, качественных результатов проводимых работ, связанных с необходимостью пространственного ориентирования различных объектов со сложной геометрий, необходимо использовать вспомогательное оборудование (устройство), обладающее возможностью свободного позиционирования объектов в пространстве с заданной скоростью и дискретностью. Указанные условия не могут быть выполнены известными техническими решениями.
Известно устройство перемещения, совмещения и позиционирования [патент РФ на изобретение №2160884, МПК G01B 5/00, G12B 5/00, приор. 15.05.2000 г., опубл. 20.12.2000 г.], содержащий основание, автоматизированную систему позиционирования и предметный стол (механизм фиксации исследуемого объекта), при этом автоматизированная система позиционирования установлена на основании и выполнена в виде основных - подвижного звена (нижнего), подвижной верхней рамы (центрального) и каретки (верхнего блоков позиционирования), а также предметный столик (дополнительного блоков позиционирования), последовательно взаимодействующих друг с другом, причем каждый блок позиционирования оснащен основанием и приводом перемещения, а пластина (механизм фиксации) установлена на предметном столике. На основании выполнены направляющие, в которых установлена каретка. На каретке в направляющих установлено подвижное звено, на котором закреплен посредствам упругих шарниров механизм совмещения и позиционирования. Привод линейных перемещений каретки смонтирован на основании, о привод линейных перемещений подвижного звена - на каретке. Механизм совмещения и позиционирования содержит подвижную нижнюю раму, платформу, подвижную верхнюю раму, предметный столик и установленную на нем пластину. Привод линейных перемещений подвижной верхней рамы установлен на платформе. Предметный столик связан с двумя приводами угловых перемещений.
Недостатками данного изобретения являются ограниченность габаритно-массовых характеристик исследуемого объекта, связанная с конструкцией самого устройства, а также ограниченность положения объекта исследования в пределах представленной установки, что снижает функциональные возможности устройства и ограничивает возможности проведения исследований объекта произвольной формы.
Данное устройство принимается за прототип, как наиболее близкое по технической сущности к заявляемому изобретению.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в расширении функциональных возможностей с повышением качества результатов проводимых работ.
Указанный технический результат достигается тем, что устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов содержит основание, автоматизированную систему позиционирования и механизм фиксации исследуемого объекта, при этом автоматизированная система позиционирования установлена на основании и выполнена в виде основных - нижнего, центрального и верхнего блоков позиционирования, а также дополнительного блока позиционирования, последовательно взаимодействующих друг с другом, причем каждый блок позиционирования оснащен основанием и приводом перемещения, а механизм фиксации установлен на дополнительном блоке позиционирования, согласно изобретению привод перемещения основных блоков позиционирования выполнен в виде резьбовой и гладких направляющих и шагового двигателя, вращающего резьбовую направляющую, а привод перемещения дополнительного блока позиционирования выполнен в виде вала, шестерней и шагового двигателя, вращающего шестерни, при этом дополнительный блок позиционирования выполнен в виде V-образного основания, в вершине которого установлен привод перемещения, изменяющий положение боковых поверхностей относительно друг друга, на одной из боковых поверхностей основания дополнительного блока позиционирования установлен опорный вал с приводом перемещения, на опорном валу установлен механизм фиксации исследуемого объекта, выполненный в виде диска с пазами, в которых подвижно установлены фиксирующие элементы.
Таким образом, выполнение привода перемещения основных блоков позиционирования в виде резьбовой и гладких направляющих и шагового двигателя, вращающего резьбовую направляющую, и привода перемещения дополнительного блока позиционирования в виде вала, шестерней и шагового двигателя, вращающего шестерни, позволяет повысить качество результатов проводимых работ, за счет возможности свободного перемещения исследуемых объектов произвольной формы в пространстве с заданной скоростью и точностью, а выполнение дополнительного блока позиционирования в виде V-образного основания, в вершине которого установлен привод перемещения, изменяющий положение боковых поверхностей относительно друг друга, на одной из боковых поверхностей основания дополнительного блока позиционирования установлен опорный вал с приводом перемещения, на опорном валу установлен механизм фиксации исследуемого объекта, выполненный в виде диска с пазами, в которых подвижно установлены фиксирующие элементы, позволяет расширить функциональные возможности устройства.
Кроме того, с целью удобства эксплуатации, устройство снабжено системой управления.
Кроме того, с целью сокращения времени установки исследуемого объекта произвольной формы, фиксирующий элемент механизма фиксации исследуемого объекта выполнен в виде винта с ручкой, установленного в корпусе, фиксирующегося кнопкой на основании, которое подвижно установлено в пазу диска механизма фиксации исследуемого объекта.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения, на этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Техническое решение иллюстрируется чертежами:
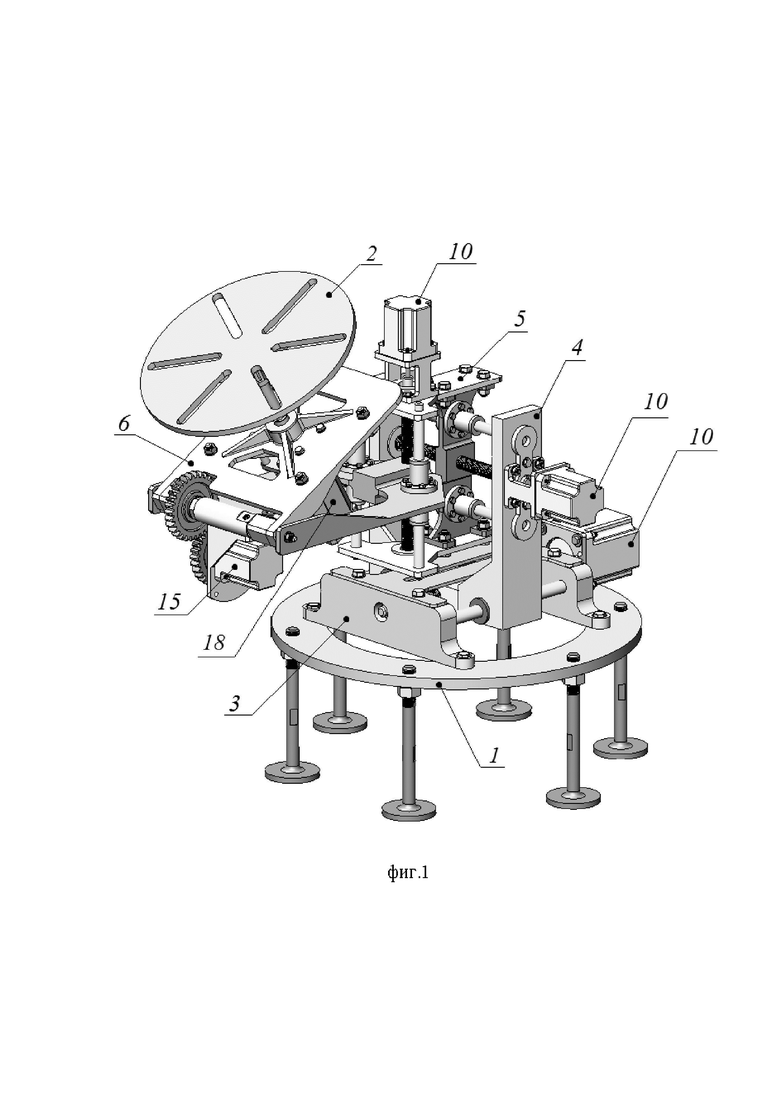
на фиг.1 представлен общий вид устройства;
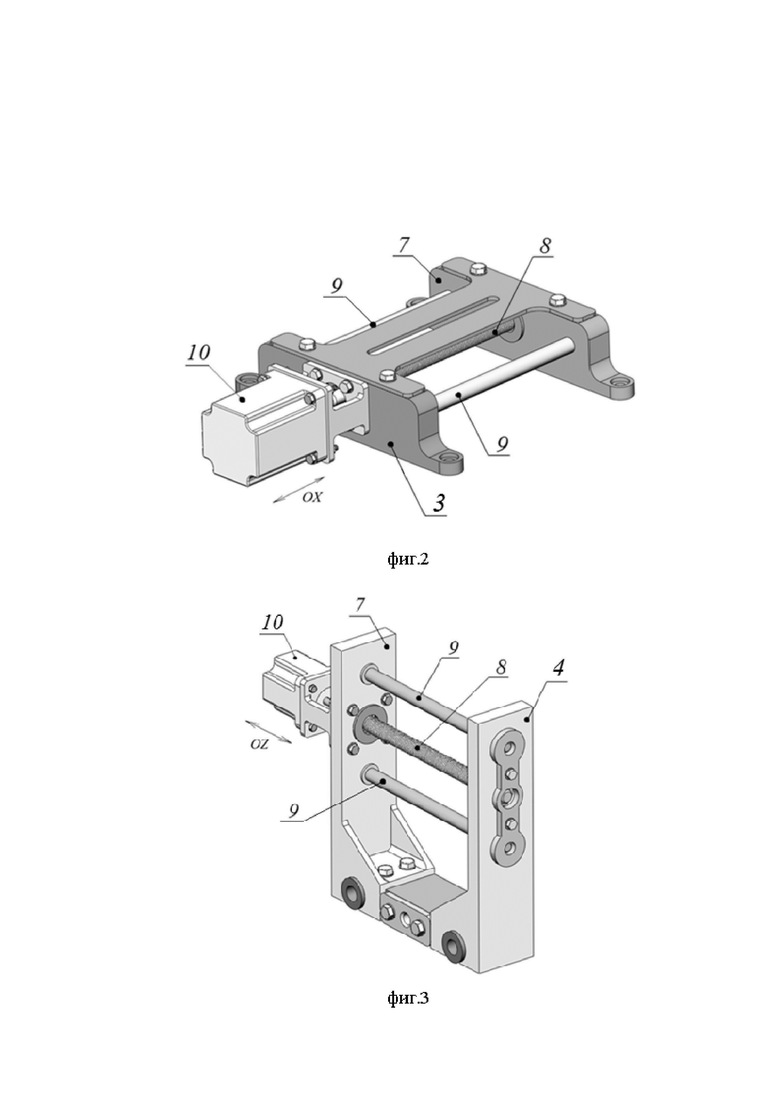
на фиг.2 - общий вид нижнего блока автоматизированной системы позиционирования;
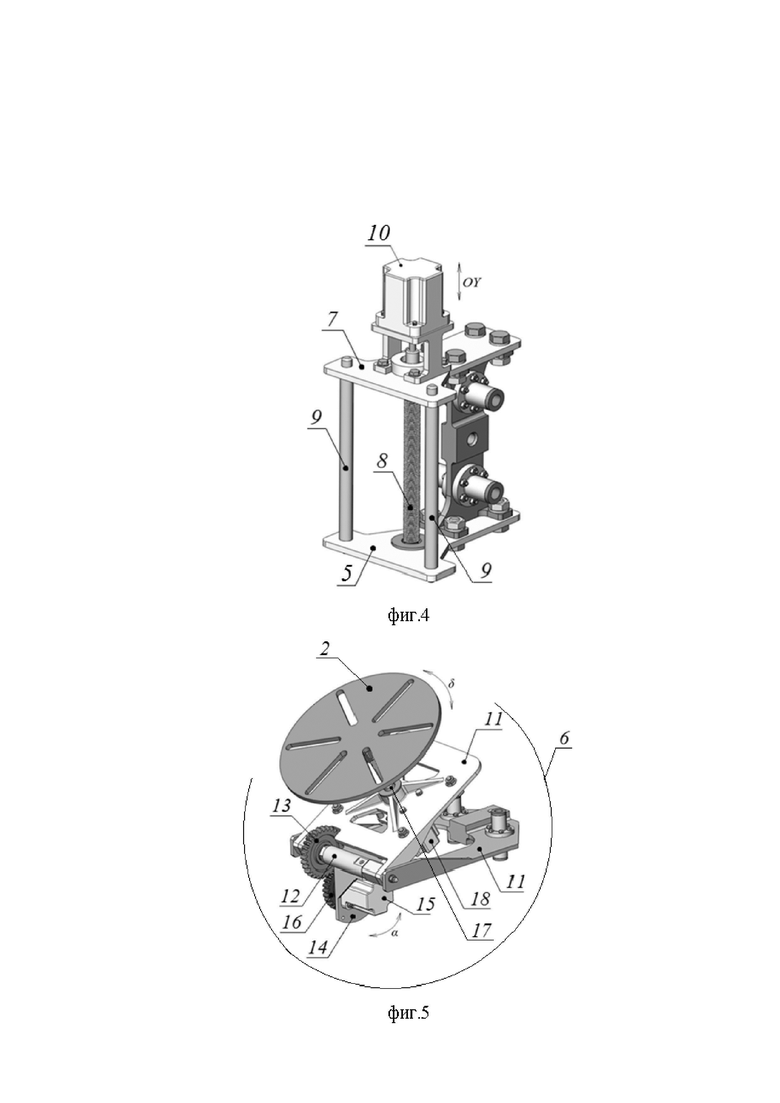
на фиг.3 - общий вид центрального блока автоматизированной системы позиционирования;
на фиг.4 - общий вид верхнего блока автоматизированной системы позиционирования;
на фиг.5 - общий вид дополнительного блока автоматизированной системы позиционирования;
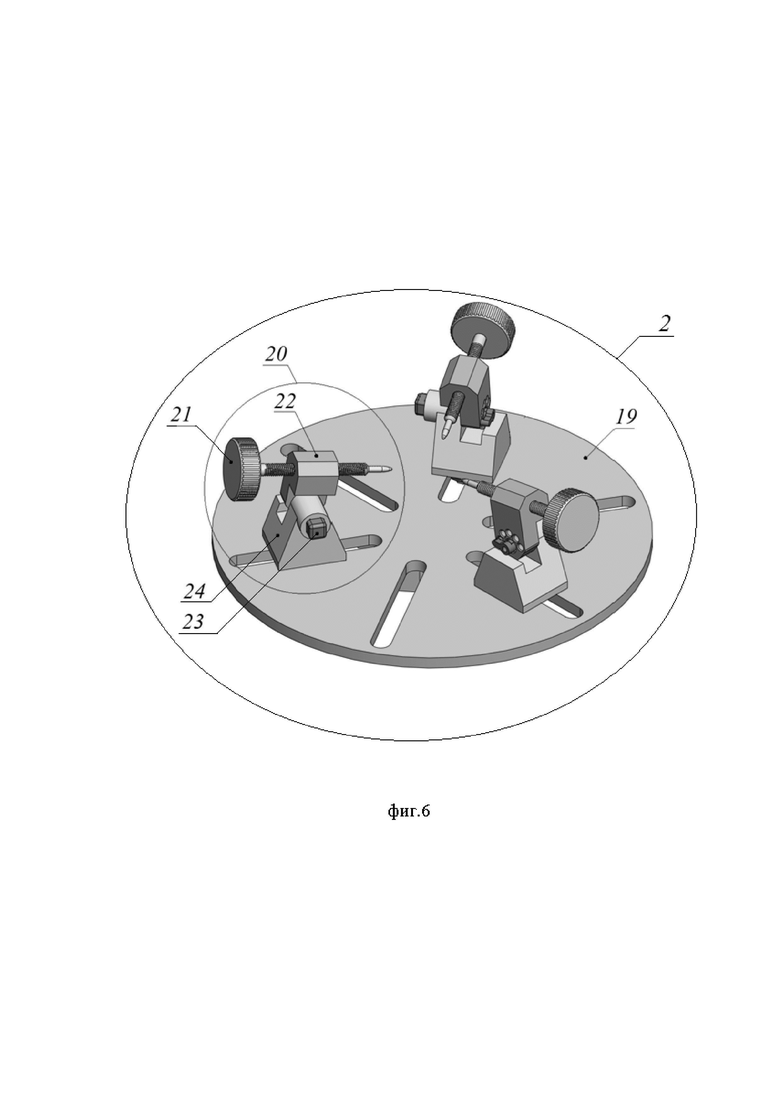
на фиг.6 - общий вид механизма фиксации исследуемого объекта.
Устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов содержит основание 1, автоматизированную систему позиционирования, механизм фиксации 2 исследуемого объекта и систему управления.
Основание 1 выполнено в виде диска зафиксированного на опорах, изменяющих высоту для установки диска в строго горизонтальном положении.
Автоматизированная система позиционирования состоит из трех основных блоков позиционирования: нижнего 3, центрального 4, верхнего 5 и одного дополнительного блока 6 позиционирования. Нижний 3 блок перемещается по оси ОХ. Центральный 4 блок передает перемещение по оси OZ. Верхний 5 блок перемещается по оси OY. Каждый основной блок содержит П-образное основание 7, резьбовую 8 и две гладкие 9 направляющие и шаговый двигатель 10. Резьбовая 8 и гладкие 9 направляющие установлены в боковых стенках основания 7. Гладкие 9 направляющие жестко зафиксированы в основании 7, а резьбовая 8 направляющая расположена между гладкими 9 направляющими с возможностью вращения. Шаговый двигатель 10 установлен с внешней стороны одной из боковых стенок основания 7 и соединен с резьбовой 8 направляющей, передавая ей вращение. Глухой торец основания 7 центрального 4 и верхнего 5 блоков оснащен сквозными отверстиями, через которые проходят направляющие нижнего 3 и центрального 4 блоков, соответственно. Основания 7 нижнего 3 блока свободными концами жестко зафиксированы на диске основания 1. Дополнительный блок 6 выполнен в виде двух пластин 11 соединенных с одной стороны валом 12 с шестерней 13. Одна из пластин 11 оснащена кронштейном 14, расположенным под валом 12, а на противоположной от вала 12 стороне выполнены отверстия, через которые проходят направляющие 8 и 9 основного верхнего 5 блока. На кронштейне 14 зафиксирован с одной стороны шаговый двигатель 15, а с другой - шестерня 16, связанная с шаговым двигателем 15 и шестерней 13. В центре второй пластины 11 с одной стороны установлен опорный вал 17, а с другой - на кронштейне шаговый двигатель 18, передающий вращение опорному валу 17. На свободном торце опорного вала 17 зафиксирован механизм фиксации 2 исследуемого объекта.
Механизм 2 фиксации исследуемого объекта выполнен в виде диска 19 с пазами, в которых подвижно установлены фиксирующие элементы 20. Фиксирующий элемент 20 выполнен в виде винта 21, корпуса 22, кнопки 23 и основания 24. Винт 21 оснащен ручкой для удобства вращения и установлен в корпус 22. Корпус 22 с противоположной от винта 21 стороны оснащен проточками для изменения угла наклона корпуса 22. Кнопка 23 установлена на основании 24 и позволяет зафиксировать корпус 22 с помощью проточек под нужным углом. Основание 24 установлено в пазу диска 19 с возможностью перемещения по всей его длине.
Система управления (не показано) содержит внешний блок питания, управляющую плату, мобильный пульт управления и блоком контроля превышения максимально-допустимой нагрузки на шаговые двигатели 10, 15 и 18. Внешний блок питания преобразует напряжения промышленной сети 220V в напряжение 12V, необходимое, для питания используемых в устройстве электронных компонентов, в том числе шаговых двигателей 10, 15 и 18. Управляющая плата преобразует сигналы, поступающие с мобильного пульта управления, и направляет их к конкретному шаговому двигателю, обеспечивая перемещение основных 3, 4, 5 и дополнительного 6 блоков позиционирования в пространстве. Для обеспечения безопасности проведения технологических операций с исследуемыми объектами и повышение надежности автоматизированной системы позиционирования, используется блок контроля превышения максимально-допустимой нагрузки на шаговые двигателя 10, 15 и 18. Блок контроля не позволяет проводить технологические операции при установке на диск 19 фрагмента исследуемого образца превышающего максимально допустимую массу, а также при заклинивании механизмов привода. Внешний блок питания, управляющая плата и блок контроля превышения максимально-допустимой нагрузки располагаются отдельно от разработанного устройства в защищающем от пыли и влаги корпусе. Устройство связано с компонентами, размещенными в защищающем корпусе, гибким жгутом проводов. Управление устройством осуществляется с единого мобильного пульта управления, который связан с компонентами, размещенными в защищающем корпусе, гибким жгутом проводов. Мобильный пульт управления оборудован джойстиками, а также световой индикацией выбранного режима работы с возможностью вывода реализуемых линейных и угловых перемещений на компьютер оператора.
Работает устройство следующим образом:
Устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов устанавливают в месте использования. Регулируют высоту опор основания 1 для выравнивания диска основания 1 в строго горизонтальном положении. Устанавливают исследуемый объект (не показано). Исследуемый объект располагают на диск 18 механизма 2 фиксации исследуемого объекта и фиксируют его, вкручивая винты 20 фиксирующих элементов 19. Удаленно с помощью системы управления задают параметры пространственного расположения исследуемого объекта. Шаговые двигатели 10, 15 и 18 вращаются, перемещая блоки 3, 4, 5, 6 автоматизированной системы позиционирования за счет резьбовых направляющих 8 и шестерней 16 и13 в заданное положение. Расположив исследуемый объект в нужном положении, производят запланированные исследования.
Для изменения положения исследуемого объекта задают параметры нового положения исследуемого объекта. Система управления включает шаговые двигатели 10, 15 и/или 18, которые перемещаю объект в нужное положение.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
• Средство, воплощающее заявленное изобретение при его осуществлении, предназначено для механизированных устройств (поворотных столов) с пятью степенями свободы для фиксации и перемещения исследуемых объектов (изделий) произвольной формы в пространстве;
• Для заявленного устройства в том виде, как оно охарактеризовано в пункте формулы изобретения, подтверждена возможность его осуществления;
• Средство, воплощающее заявленное изобретение при осуществлении, способно обеспечить расширение функциональных возможностей с повышением качества результатов проводимых работ.
Следовательно, заявленное изобретение соответствует условию «Промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для высокоточного одноосевого растяжения эластичных субстратов для культивирования клеток и эмбриональных тканей | 2019 |
|
RU2723726C1 |
| АППАРАТУРА ДЛЯ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2008 |
|
RU2366974C1 |
| Способ и устройство для контроля контактов розеток соединителей, установленных на печатной плате | 2023 |
|
RU2811335C1 |
| Опорно-поворотное устройство | 2016 |
|
RU2634333C1 |
| Устройство для комплексной оценки продовольственного зерна и семенного материала | 2021 |
|
RU2776946C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЧРЕСКОСТНЫМ АППАРАТОМ | 2006 |
|
RU2327430C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
| Автоматическая линия для сборки магнитной системы электромагнитного реле | 1990 |
|
SU1709417A1 |
| Способ и устройство для гибки персонифицированных имплантатов из реконструктивных титановых пластин | 2023 |
|
RU2829203C1 |
Изобретение относится к механизированным устройствам, в частности к поворотным столам с пятью степенями свободы для фиксации и перемещения исследуемых объектов произвольной формы в пространстве, и может применяться для проведения широкого спектра работ как в специализированных защитных боксах (камерах), так и на открытом воздухе: исследование поверхностей деталей (изделий) различной геометрической формы методами количественной металлографии (фрактографии), создание трехмерных моделей деталей (изделий) сложной геометрии с применением технологии 3D сканирования, а также нанесение различных покрытий (окрашивание) на поверхности деталей (изделий) различной геометрической формы. Устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов содержит основание, автоматизированную систему позиционирования и механизм фиксации исследуемого объекта. Автоматизированная система позиционирования установлена на основании и выполнена в виде основных - нижнего, центрального и верхнего блоков позиционирования, а также дополнительного блока позиционирования, последовательно взаимодействующих друг с другом. Каждый блок позиционирования оснащен основанием и приводом перемещения, а механизм фиксации установлен на дополнительном блоке позиционирования. Привод перемещения основных блоков позиционирования выполнен в виде резьбовой и гладких направляющих и шагового двигателя, вращающего резьбовую направляющую, а привод перемещения дополнительного блока позиционирования выполнен в виде вала, шестерней и шагового двигателя, вращающего шестерни. Дополнительный блок позиционирования выполнен в виде V-образного основания, в вершине которого установлен привод перемещения, изменяющий положение боковых поверхностей относительно друг друга. Технический результат - расширение функциональных возможностей с повышением качества результатов проводимых работ. 2 з.п. ф-лы, 6 ил.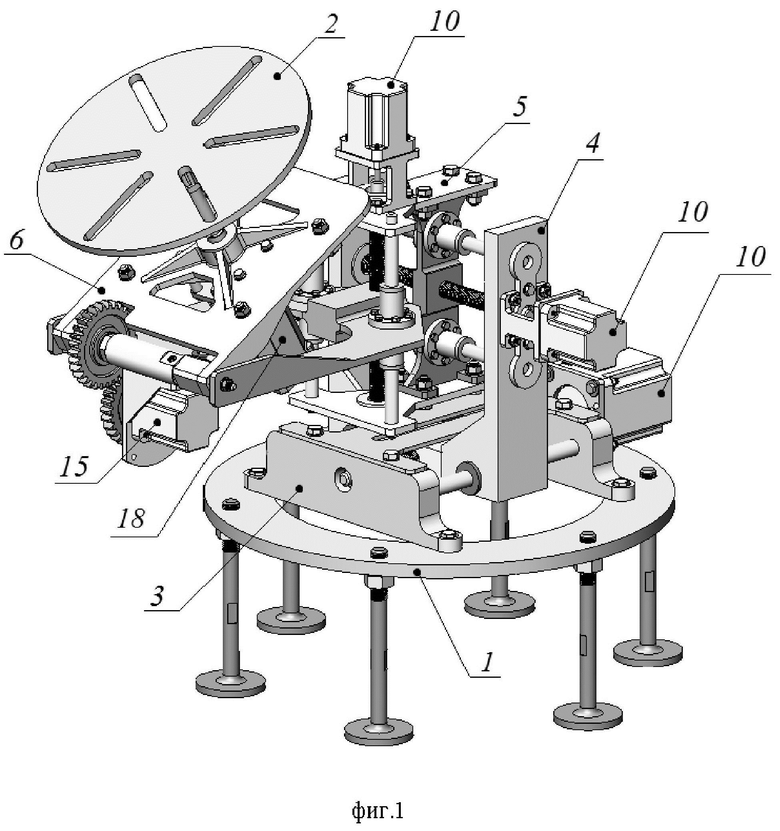
1. Устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов, содержащее основание, автоматизированную систему позиционирования и механизм фиксации исследуемого объекта, при этом автоматизированная система позиционирования установлена на основании и выполнена в виде основных – нижнего, центрального и верхнего - блоков позиционирования, а также дополнительного блока позиционирования, последовательно взаимодействующих друг с другом, причем каждый блок позиционирования оснащен основанием и приводом перемещения, а механизм фиксации установлен на дополнительном блоке позиционирования, отличающееся тем, что привод перемещения основных блоков позиционирования выполнен в виде резьбовой и гладких направляющих и шагового двигателя, вращающего резьбовую направляющую, а привод перемещения дополнительного блока позиционирования выполнен в виде вала, шестерней и шагового двигателя, вращающего шестерни, при этом дополнительный блок позиционирования выполнен в виде V-образного основания, в вершине которого установлен привод перемещения, изменяющий положение боковых поверхностей относительно друг друга, на одной из боковых поверхностях основания дополнительного блока позиционирования установлен опорный вал с приводом перемещения, на опорном валу установлен механизм фиксации исследуемого объекта, выполненный в виде диска с пазами, в которых подвижно установлены фиксирующие элементы.
2. Устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов по п.1, отличающееся тем, что оно снабжено системой управления.
3. Устройство с автоматизированной системой позиционирования для пространственного ориентирования исследуемых объектов по п.1, отличающееся тем, что фиксирующий элемент механизма фиксации исследуемого объекта выполнен в виде винта с ручкой, установленного в корпусе, фиксирующегося кнопкой на основании, которое подвижно установлено в пазу диска механизма фиксации.
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РАСТВОРОВ ИЗ МЕЛКОГО ЗАПОЛНИТЕЛЯ И ПОЛИМЕРЦЕМЕНТНОЙ СУСПЕНЗИИ | 0 |
|
SU207790A1 |
| US 4575942 A1, 18.03.1986 | |||
| Способ получения искусственного вольтаита | 1930 |
|
SU23506A1 |
