Изобретение относится к устройствам оценки угловых координат целей и предназначено для моноимпульсного радиолокатора (МРЛК) с фазированной антенной решеткой (ФАР), осуществляющей безынерционное электронное управление положением равносигнального направления (РСН).
Известно устройство оценки угловых координат целей для МРЛК [1, рис.109 на с.297], выполненное в виде делителя и автономного источника калибровочного напряжения, причем делитель подключен своим первым входом к выходу МРЛК для сигнала ошибки (СО) - U, а своим вторым входом - к источнику калибровочного напряжения, выход делителя является выходом данного устройства для сигнала углового отклонения цели от РСН

Недостатком известного устройства является снижение точности оценки αц из-за отсутствия автоматической коррекции калибровочного напряжения μ в зависимости от углового отклонения цели от РСН, а также от углового отклонения РСН от направления нормали к апертуре ФАР [2, с.139, ф-ла 2.52, 4, с.186].
Более близким по составу элементов и функциональным связям является устройство оценки угловых координат цели для обзорного моноимпульсного радиолокатора по Патенту RU 2052831 C1, G01S 3/04 от 14.01.88.
Данное устройство содержит блоки оценки сигнала ошибки  и пеленгационной чувствительности
и пеленгационной чувствительности  на скользящем интервале углов, которые имеют общие входы для сигнала ошибки U и угла РСН α0, a выходы которых через делитель подключены к выходу устройства для сигнала оценки углового отклонения цели от РСН.
на скользящем интервале углов, которые имеют общие входы для сигнала ошибки U и угла РСН α0, a выходы которых через делитель подключены к выходу устройства для сигнала оценки углового отклонения цели от РСН.

Недостатком известного устройства является снижение точности оценки угловых координат целей для обзорного МРЛК из-за существенного ограничения числа измерений значений U и μ на скользящем интервале, особенно применительно к ФАР с безынерционным управлением угловым положением РСН. Снижение точности обусловлено также динамической ошибкой запаздывания в оценке значений  и
и  в процессе изменения входных сигналов U и α0 на проходе [2, с.385].
в процессе изменения входных сигналов U и α0 на проходе [2, с.385].
Точность оценки угловых координат целей может быть повышена при дискретном управлении положением РСН по ступенчатому закону, например, в моноимпульсных радиолокаторах с ФАР, когда значения оценок  и
и  могут формироваться на более протяженном интервале времени и при фиксированных угловых положениях РСН [3, с.327-330].
могут формироваться на более протяженном интервале времени и при фиксированных угловых положениях РСН [3, с.327-330].
Однако состав элементов известного устройства, функциональные схемы блоков оценки  и
и  на скользящем интервале углов и их связи не обеспечивают реализации указанной возможности при указанном дискретном управлении положением РСН.
на скользящем интервале углов и их связи не обеспечивают реализации указанной возможности при указанном дискретном управлении положением РСН.
Технической задачей, решаемой данным изобретением, является повышение точности оценки угловых координат целей путем оценки СО  и пеленгационной чувствительности
и пеленгационной чувствительности  при фиксированных значениях углов РСН.
при фиксированных значениях углов РСН.
Поставленная задача решается тем, что в предлагаемое устройство оценки угловых координат целей для моноимпульсного радиолокатора (МРЛК) с ФАР введены задатчик фиксированных значений углов (РСН) по ступенчатому закону, индикатор цели на проходе, ключевой элемент (КЭ), а также генератор тактовых импульсов для синхронизации моментов съема выходных сигналов указанного задатчика, блока оценки СО и индикатора цели на проходе, причем блок оценки СО формирует среднее значение СО МРЛК для фиксированных значений углов РСН, выход указанного блока соединен с сигнальными входами индикатора цели на проходе и блока оценки пеленгационной чувствительности непосредственно, а с первым входом делителя через КЭ, выход индикатора цели на проходе соединен с управляющими входами КЭ и блока оценки пеленгационной чувствительности, который выполняет следующую функцию:
 ,
,
где 
 - значения оценок СО в двух соседних фиксированных положениях РСН;
- значения оценок СО в двух соседних фиксированных положениях РСН;
Δα - шаг по углу для ступенчатого закона управления РСН;
γj - сигнал индикации цели на проходе (γj=1) или ее отсутствия (γj=0)
Предлагаемая совокупность признаков для повышения точности оценки угловых координат целей формирует значения оценок сигналов ошибки  и пеленгационной чувствительности
и пеленгационной чувствительности  при фиксированных значениях углов РСН.
при фиксированных значениях углов РСН.
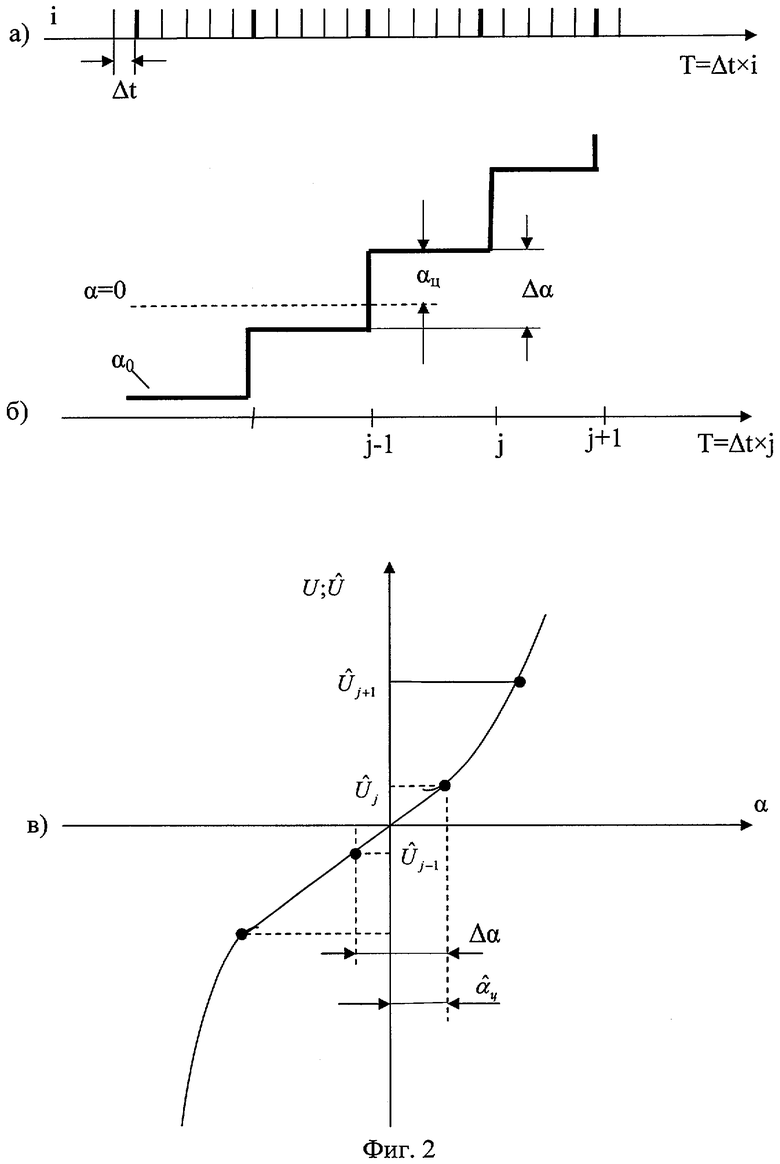
На фиг.1 показана функциональная схема предлагаемого устройства. Принцип работы предлагаемого устройства и достигаемый технический результат поясняются графически на фиг.2, где
а) последовательность тактовых импульсов с интервалом Δt;
б) ступенчатый закон изменения углов РСН α0;
в) пеленгационная характеристика МРЛК и значения оценок СО  и углового отклонения цели от РСН
и углового отклонения цели от РСН  ц
ц
Предлагаемое устройство содержит:
1 - моноимпульсный радиолокатор (МРЛК) с фазированной антенной решеткой (ФАР);
2 - блоки оценки сигнала ошибки (СО) для фиксированных значений углов равносигнального направления;
3 - индикатор цели на проходе;
4 - блок оценки пеленгационной чувствительности;
5 - делитель;
6 - ключевой элемент КЭ;
7 - задатчик фиксированных значений углов равносигнального направления;
8 - генератор тактовых импульсов.
МРЛК с ФАР - 1 своим выходом для сигнала ошибки (СО) U соединен со входом блока 2 оценки СО  который своим выходом соединен с сигнальными входами индикатора цели на проходе 3, ключевого элемента КЭ-6 и блока 4 оценки пеленгационной чувствительности
который своим выходом соединен с сигнальными входами индикатора цели на проходе 3, ключевого элемента КЭ-6 и блока 4 оценки пеленгационной чувствительности  . Выход индикатора цели на проходе 3 соединен с управляющими входами блока 4 и КЭ-6, выходы которых соединены соответственно со вторым и первым входами делителя 5, выход которого является выходом устройства для сигнала оценки углового отклонения цели от РСН
. Выход индикатора цели на проходе 3 соединен с управляющими входами блока 4 и КЭ-6, выходы которых соединены соответственно со вторым и первым входами делителя 5, выход которого является выходом устройства для сигнала оценки углового отклонения цели от РСН  ц.
ц.
Генератор тактовых импульсов 8 подключен к синхронизирующим входам блока 2 оценки СО  индикатора цели на проходе 3 и задатчика 7.
индикатора цели на проходе 3 и задатчика 7.
Работа устройства.
При изменении посредством задатчика 7 угла РСН по ступенчатому закону α0j=Δα·j, как показано на фиг.2б, измеряемые МРЛК с ФАР (блок 1) сигналы ошибки U поступают в блок 2, формирующий сглаженное значение входного сигнала для фиксированного значения угла РСН
где U и  - входной сигнал ошибки (СО) и выходной сигнал оценки СО;
- входной сигнал ошибки (СО) и выходной сигнал оценки СО;
индекс i - номер тактового импульса;
индекс j - номер шага РСН по углу;
индекс m - число отсчетов при фиксированных значениях углов РСН.
При этом точность формирования  пропорциональна
пропорциональна  .
.
Указанный сигнал  поступает в блок 3 для индикации наличия цели на проходе (γ=1) или ее отсутствия (γ=0) в данном шаге изменения угла РСН
поступает в блок 3 для индикации наличия цели на проходе (γ=1) или ее отсутствия (γ=0) в данном шаге изменения угла РСН

В случае, когда при изменении положения РСН на угол Δα значение  меняет знак, например,
меняет знак, например,  выходной сигнал блока 3 γ=1 поступает на управляющий вход нормально разомкнутого ключевого элемента КЭ-6, который обеспечивает передачу сигнала
выходной сигнал блока 3 γ=1 поступает на управляющий вход нормально разомкнутого ключевого элемента КЭ-6, который обеспечивает передачу сигнала  на первый вход делителя 5.
на первый вход делителя 5.
Кроме того,  поступает на сигнальный вход, a γj - на управляющий вход блока 4 оценки пеленгационной чувствительности
поступает на сигнальный вход, a γj - на управляющий вход блока 4 оценки пеленгационной чувствительности  который выполняет следующую функцию:
который выполняет следующую функцию:
где шаг по углу Δα - константа для данного закона управления РСН, значение которой ограничено диапазоном угловой линейности пеленгационной характеристики.
 поступает на второй вход делителя 5.
поступает на второй вход делителя 5.
Делитель 5, ключевой элемент КЭ-6 и генератор (Г) тактовых импульсов являются типовыми элементами электронных схем, например [5, рис.1.35 на с.42, рис.1.12 на с.30 и рис.9.9 на с.244];
МРЛК с ФАР - 1 с выходом для сигнала ошибки известен, например [4, с.267-269].
Делитель 5 формирует следующую оценку углового отклонения цели от РСН  как показано на фиг.2в.
как показано на фиг.2в.
Таким образом, совокупность признаков пеленгационного устройства обеспечивает оценку значений 
 и
и  при фиксированных значениях углов РСН, что повышает точность по сравнению с известным устройством с оценкой указанных параметров на скользящем интервале углов.
при фиксированных значениях углов РСН, что повышает точность по сравнению с известным устройством с оценкой указанных параметров на скользящем интервале углов.
Литература
1. П.И.Дудник, Ю.И.Чересов. Авиационные радиолокационные устройства. Изд. ВВИА им. Жуковского, 1986.
2. A.M.Зуфрин. Методы построения судовых автоматических угломерных систем. Изд. Судостроение, - Л.: 1970.
3. Радиолокационные системы радиоуправления. Под ред. А.И.Канащенкова и др., т.2. - М.: Радиотехника, 2003.
4. А.А.Коростелев. Пространственно-временная теория радиосистем. - М.: Радио и связь, 1987.
5. Проектирование радиолокационных приемных устройств. Под ред. М.А.Соколова. - М.: Высшая школа, 1984.
Изобретение относится к области радиолокации и может использоваться для оценки угловых координат целей. Достигаемый технический результат - повышение точности оценки угловых координат целей путем оценки сигнала ошибки и пеленгационной чувствительности при фиксированных значениях углов при равносигнальном направлении. Устройство оценки угловых координат целей для моноимпульсного радиолокатора с фазированной антенной решеткой содержит блок оценки сигнала ошибки и блок оценки пеленгационной чувствительности, делитель, задатчик фиксированных значений углов по ступенчатому закону, индикатор цели на проходе, ключевой элемент, генератор тактовых импульсов. 2 ил.
Устройство оценки угловых координат для моноимпульсного радиолокатора (МРЛК) с фазированной антенной решеткой (ФАР), содержащее блоки оценки сигнала ошибки (СО) и пеленгационной чувствительности, выходы которых соединены, соответственно, с первым и вторым входами делителя, выход которого является выходом устройства для сигнала оценки углового отклонения цели от равносигнального направления (РСН), отличающееся тем, что в него дополнительно введены задатчик фиксированных значений углов (РСН) по ступенчатому закону, индикатор цели на проходе, ключевой элемент (КЭ), а также генератор тактовых импульсов для синхронизации моментов съема выходных сигналов указанных выше задатчика, блока оценки СО и индикатора цели на проходе, причем блок оценки СО формирует среднее значение СО МРЛК для фиксированных значений углов РСН, выход указанного блока соединен с сигнальными входами индикатора цели на проходе и блока оценки пеленгационной чувствительности непосредственно, а с первым входом делителя через КЭ, выход индикатора цели на проходе соединен с управляющими входами КЭ и блока оценки пеленгационной чувствительности 
 ,
,
где  j, j-1 - значения оценок СО в двух соседних фиксированных положениях РСН;
j, j-1 - значения оценок СО в двух соседних фиксированных положениях РСН;
Δα - шаг по углу для ступенчатого закона управления РСН;
γj - сигнал индикации цели на проходе (γj=1) или ее отсутствия (γj=0).
| RU 2052831 C1, 20.01.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВЫСОКОТЕМПЕРАТУРНОГО СВЕРХПРОВОДНИКА В СИСТЕМЕ НАТРИЙ - ТЕЛЛУРИД НАТРИЯ | 2010 |
|
RU2441934C1 |
| WO 00/39601 A1, 06.07.2000 | |||
| US 3735410, 22.05.1973 | |||
| УПЛОТНЕННОЕ ВОЙЛОЧНОЕ ИЗДЕЛИЕ С УМЕНЬШЕННОЙ КАЖУЩЕЙСЯ ТОЛЩИНОЙ И УМЕНЬШЕННОЙ КАЖУЩЕЙСЯ ПОДДЕРЖКОЙ | 1999 |
|
RU2193612C1 |

