Настоящее изобретение касается способа определения показателя надежности, связанного с траекторией подвижного объекта. Изобретение можно применять для любой спутниковой системы позиционирования, использующей приемники типа GNSS (Global Navigation Satellite System), такие как приемники GPS (Global Positioning System) или Galileo.
В спутниковой системе позиционирования, использующей приемник типа GNSS, установленный на борту подвижного объекта, сигналы данных, позволяющие приемнику вычислять свое положение, поступают от различных спутников, принадлежащих к одной группировке спутников позиционирования. Группировка содержит по меньшей мере четыре спутника для определения четырех неизвестных, соответствующих географическим x, y, z и временным t координатам приемника. Позиционирование подвижного объекта при помощи приемника осуществляют в два этапа. На первом этапе приемник принимает радиоэлектрические сигналы, являющиеся навигационными сигналами, поступающими от четырех спутников группировки, и на втором этапе приемник производит оценку расстояний, отделяющих подвижный объект от четырех спутников, от которых приняты сигналы, и определяет положение подвижного объекта, используя триангуляционный метод.
Ошибка в положении подвижного объекта может иметь катастрофические последствия в случае применения в гражданской авиации или в случае географически локализованной дорожной оплаты.
Существуют самые разные источники ошибок позиционирования, которые могут повлиять на достоверность данных положения, определяемых при помощи спутниковой системы позиционирования. Ошибка позиционирования может быть связана с технической проблемой при приеме сигналов GNSS, например, такой как неисправность приемника или сбой при передаче данных используемой спутниковой группировкой. Надежность положения, определяемого при помощи спутниковой системы позиционирования, зависит также от окружающей среды, в которой находится подвижный объект.
В случае авиационного применения, в гражданской авиации, приемнику не мешают никакие препятствия, поэтому радиоэлектрические сигналы принимаются от спутников напрямую без отражения от какой-либо стены. В этом случае существуют системы SBAS (на английском языке: Satellite-Based Augmentation Systems), позволяющие получать надежную информацию, связанную с положением, вычисленным приемником авиационного подвижного объекта. Системы SBAS контролируют и постоянно ограничивают ошибки, происходящие на орбите спутников при синхронизации каждого спутника по отсчету времени группировок, и ошибки, связанные с распространением радиоэлектрических сигналов в верхних слоях атмосферы, в частности в ионосфере. Данные, выдаваемые системой SBAS, позволяют приемнику авиационного подвижного объекта определять положение подвижного объекта, а также предел ошибки положения.
Применения, относящиеся к географически локализованной дорожной оплате, предусматривают определение дороги, по которой движется наземный подвижный объект, оборудованный приемником GNSS, и выставление счета пользователю наземного подвижного объекта, если эта дорога является платной. Поскольку выставление счета зависит от используемой дороги, приемник должен выдавать две дополнительные информации, касающиеся, с одной стороны, положения подвижного объекта и, с другой стороны, траектории подвижного объекта. Поскольку от этих данных зависит выставление счета, необходимо также определять надежную информацию, касающуюся используемой траектории.
Однако, в случае применения для географически локализованной дорожной оплаты, условия приема радиоэлектрических сигналов являются гораздо более сложными и гораздо менее контролируемыми, чем в случае авиационного применения. В данном случае гораздо труднее ограничить ошибку положения, определяемого приемником.
В городской среде навигационные сигналы, исходящие от одного или двух, или трех спутников группировки, могут быть остановлены зданиями и не дойти до приемника подвижного объекта. В этом случае искажается геометрия совокупности спутников, используемых для вычисления положения подвижного объекта, что может сделать невозможным вычисление положения подвижного объекта.
Точно так же, в неблагоприятной наземной среде навигационные сигналы, передаваемые спутником группировки, могут отражаться от некоторых стен, прежде чем попасть в приемник. Это явление, называемое явлением многолучевого распространения, существенно сказывается на точности положения, вычисляемого приемником. Действительно, измеряемый приемником путь в этом случае является более длинным, чем расстояние, разделяющее подвижный объект от соответствующего спутника. В результате этого происходит ошибка в триангуляционном способе и, следовательно, в положении подвижного объекта. В этом случае последствие является двойным, поскольку, с одной стороны, ошибка положения является значительной и, с другой стороны, приемник не имеет возможности узнать, что он совершил ошибку, или оценить совершенную ошибку. Ошибки, совершаемые приемником, могут привести к ошибочному выводу о выбранной дороге и, следовательно, к ошибочному выставлению счета. Поэтому необходимо иметь показатель надежности, касающийся траектории подвижного объекта, определяемой приемником.
Настоящее изобретение призвано решить эти проблемы и предложить способ определения показателя надежности, связанного с траекторией движения подвижного объекта и позволяющего оценить ошибку в оценке положения подвижного объекта, совершенную приемником GNSS, находящимся на борту подвижного объекта.
В связи с этим, объектом изобретения является способ определения показателя надежности, связанного с траекторией подвижного объекта, оборудованного приемником, выполненным с возможностью оценки положения подвижного объекта на основании приема навигационных сигналов GNSS, передаваемых спутниковой группировкой, при этом навигационные сигналы модулируют при помощи кода, и приемник содержит локальный дубликат кода, при этом способ отличается тем, что содержит следующие этапы:
a) оценивают последовательные положения приемника в разные моменты измерения положения,
b) идентифицируют сегмент траектории R1, проходящий вблизи последовательных оцениваемых положений,
c) определяют последовательные функции автокорреляции между принятыми навигационными сигналами и локальным дубликатом кода,
d) выдвигают гипотезу скорости перемещения приемника по идентифицированному сегменту траектории R1,
e) на основании гипотезы скорости перемещения приемника выводят функцию доплеровской задержки, соответствующую движению приемника,
f) применяют функцию доплеровской задержки для каждой функции автокорреляции, определенной на этапе с, и на основании этого выводят скорректированные функции автокорреляции,
g) суммируют скорректированные функции автокорреляции, при этом результат суммирования соответствует скорректированной функции автокорреляции 
h) сравнивают результат суммирования скорректированных функций автокорреляции 
Предпочтительно показатель надежности является квадратичным критерием 
Дополнительно, способ может содержать дополнительный этап, заключающийся в том, что выдвигают несколько разных гипотез скорости перемещения приемника, определяют показатель надежности, соответствующий каждой гипотезе скорости, и выбирают гипотезу скорости, имеющую самый высокий показатель надежности.
В альтернативном варианте скорость перемещения приемника можно измерять при помощи инерциального датчика.
Предпочтительно показатель надежности определяют для каждого спутника группировки.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и не ограничительного примера, со ссылками на прилагаемые схематичные чертежи, на которых:
Фиг.1 - схема примера типовой дорожной системы в соответствии с изобретением;
Фиг.2 - пример, иллюстрирующий определение положения подвижного объекта, оборудованного приемником GNSS, в соответствии с изобретением;
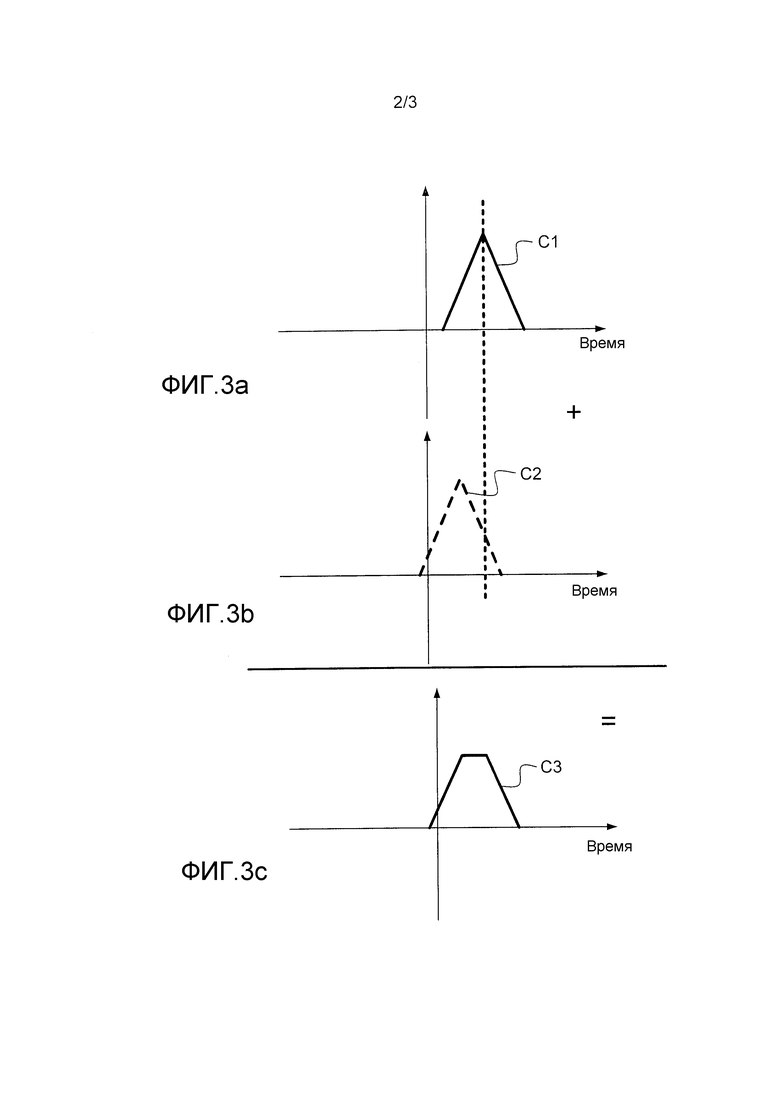
Фиг.3а, 3b, 3с - три схемы, иллюстрирующие пример изменения функции автокорреляции сигнала GPS в соответствии с изобретением;
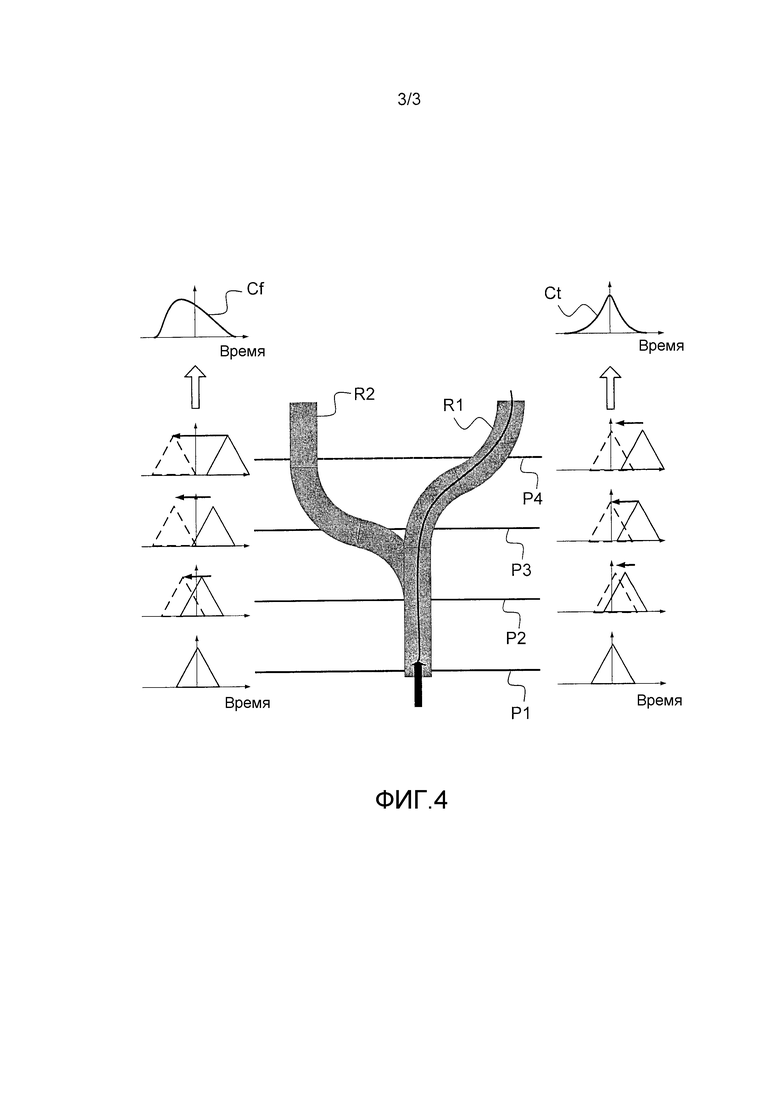
Фиг.4 - схема, иллюстрирующая способ определения показателя надежности, связанного с траекторией подвижного объекта, в соответствии с изобретением.
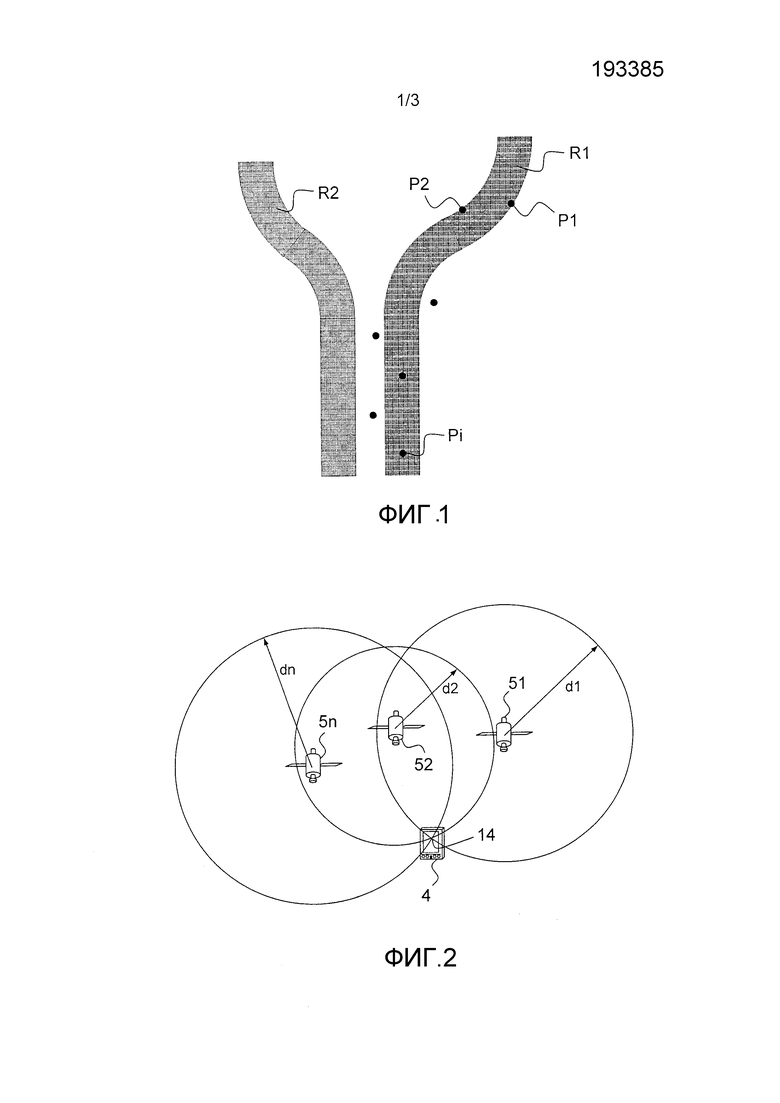
На фиг.1 представлена схема примера типовой дорожной системы, содержащей две возможные дороги R1, R2. Дорога R1 является платной, дорога R2 не является платной. Несколько подвижных объектов, оборудованных приемником GNSS, движутся по платной дороге R1. На положения Р1-Pi, где i является целым числом, превышающим 1, различных подвижных объектов, определяемые приемниками GNSS каждого подвижного объекта, влияют ошибки. Совершенные ошибки могут привести к ошибочному выводу относительно выбранной дороги и, следовательно, к ошибочному выставлению счета.
Пример определения положения подвижного объекта, оборудованного приемником GNSS 4, схематично представлен на фиг.2. Приемник 4 определяет расстояния d1, d2, …, dn, где n является целым числом, превышающим или равным 4, которые отделяют его по меньшей мере от четырех спутников 51, 52, …, 5n группировки, при этом на фиг.2 показаны только три спутника, затем на их основании определяют точку пересечения 14 по меньшей мере четырех сфер, центры которых находятся на четырех спутниках и которые имеют окружность, проходящую через приемник 4, при этом каждая сфера имеет центр, обозначенный положением спутника 51-5n, и она имеет радиус, соответствующий одному из расстояний d1-dn. Положение приемника GNSS 4 и, следовательно, подвижного объекта, оборудованного этим приемником 4, соответствует этой точке пересечения 14. Измерение расстояний d1-dn в приемнике 4 происходит посредством хронометража времени поступления радиоэлектрических сигналов, образующих навигационное сообщение, от спутников 51-5n. Радиоэлектрические сигналы, передаваемые каждым спутником, содержат данные, необходимые для вычисления положения приемника, причем эти данные модулированы при помощи кода, который может быть, например, периодическим псевдослучайным кодом расширения. Скорость передачи данных медленнее, чем скорость передачи кода. Например, в случае сигнала GPS код расширения имеет период 1 мс и скорость передачи 1023 бит в секунду, тогда как скорость передачи данных составляет 50 бит в секунду. Все данные, добавляемые по модулю 2 к коду расширения, передаются на несущей частоте. Как правило, в случае сигнала GPS несущая частота равна 1,57542 ГГц. Основные данные, которые поступают от каждого спутника в виде навигационного сообщения и которые должен обрабатывать приемник 4, включают в себя время передачи сообщения и положение спутника в момент передачи радиоэлектрического сигнала. Спутник также передает и другие данные, такие как некоторые поправки, которые необходимо внести в бортовые часы спутника, параметры коррекции скорости распространения сигналов в слоях земной атмосферы и приблизительные положения других спутников группировки, при помощи данных, называемых альманахом. Спутник передает в своем навигационном сообщении свои эфемериды (кеплеровские параметры), позволяющие приемнику 4 вычислить положение спутника в системе координат, привязанной к Земле. В случае сигнала GPS эфемериды включают в себя 16 параметров, повторяющихся каждые 30 с в навигационном сообщении.
После получения положения спутника приемнику 4 остается определить время передачи сообщения, чтобы вывести из него время распространения сигнала, переданного соответствующим спутником, расстояние, отделяющее его от упомянутого спутника, и радиус соответствующей сферы. Время передачи сообщения включено в содержание навигационного сообщения, передаваемого спутником, и в случае системы GPS повторяется каждые шесть секунд. Вместе с тем, для времени, считываемого из навигационного сообщения, следует применять поправку часов спутника, чтобы привести передаваемое время к системе отсчета, общей для всех спутников. Эта поправка передается каждые тридцать секунд.
Когда время передачи сообщения раскодировано и скорректировано, приемник выводит из него время распространения радиоэлектрического сигнала посредством разности между временем приема и временем передачи навигационного сообщения. Эта информация, скорректированная от ошибок скорости распространения сигналов в различных слоях земной атмосферы, таких как ионосфера, дает приемнику оценку расстояния, отделяющего его от спутника. Используя сигналы, поступающие по меньшей мере от четырех спутников 51-5n группировки, приемник 4 выводит на их основании свое положение и, следовательно, положение подвижного объекта, на котором он находится, при помощи известного триангуляционного метода.
Определение времени приема сигнала GNSS, как и любого сигнала расширенного спектра, осуществляют посредством вычисления функции автокорреляции между принятым сигналом и локальным дубликатом кода расширения, соответствующего искомому спутнику. В случае сигнала GPS функция автокорреляции является функцией в виде треугольника, при этом положение во времени его вершины указывает момент приема сигнала. Этот момент приема используют в триангуляционном способе.
Функция автокорреляции сигнала GPS схематично представлена на фиг.3а и 3b для двух последовательных моментов t1 и t2. Как показано на этих двух фигурах, функции автокорреляции С1 и С2 сигнала GPS, вычисленные в момент t1 и в момент t2, превышающий момент t1, смещены, как показано на фиг.3b, в другое положение во времени. Положение пика корреляции меняется в течение времени в зависимости от относительного движения спутника по отношению к приемнику 4 подвижного объекта и, следовательно, от изменения расстояния между спутником и приемником 4. Это явление, известное под названием доплеровского эффекта на код расширения, связано с тремя разными причинами, которыми являются движение спутника, движение приемника и, в меньшей степени, погрешности часов приемника.
Движение спутника относительно приемника, который считается неподвижным, можно компенсировать таким образом, чтобы это движение не влияло на перемещение пика автокорреляции. Скорость перемещения пика корреляции, связанная с перемещением спутника, выражается в виде 
Радиальную скорость Vr спутника вычисляют на основании расстояния, отделяющего спутник от приемника 4, с использованием эфемерид, передаваемых спутником. Расстояние d(t) между спутником и приемником в момент t выводят непосредственно путем вычисления нормы вектора, связывающего положение спутника с положением приемника. Такое же вычисление, производимое в последующий момент t+δt, позволяет оценить расстояние между спутником и приемником в момент t+δt, то есть d(t+δt). При этом радиальная скорость выражается в виде 
Если Rk(τ) является функцией автокорреляции, вычисленной в момент τ после k-й миллисекунды, где k является целым числом, превышающим 1, и где τ соответствует оценке времени поступления сигнала, компенсацию движения спутника осуществляют, применяя задержку к этой функции автокорреляции, при этом задержка равна 
Чтобы облегчить процесс оценки положения пика автокорреляции R(τ), эту оценку осуществляют на основании некогерентной суммы последовательности из N функций автокорреляции, где N является числом измерений положения, произведенных в течение общего времени измерения.
Если доплеровский эффект не компенсирован, функция автокорреляции имеет не пик, а уплощенную вершину, как видно из результата С3 суммирования функций автокорреляции С1+С2, показанного на фиг.3с. Этот эффект оказывает крайне отрицательное влияние на оценку времени поступления сигнала GPS.
Для решения этой проблемы и коррекции доплеровского эффекта, связанного с движением спутника, к каждой вычисленной функции автокорреляции следует применять вышеуказанную задержку
Эта операция позволяет компенсировать доплеровский эффект, связанный с движением спутника, и найти для неподвижного приемника пик корреляции в виде треугольника.
Как правило, доплеровский эффект, связанный с перемещением приемника 4, компенсировать невозможно, поэтому он оказывает влияние. Этот доплеровский эффект сказывается на коде расширения, который смещается относительно кода расширения спутника, что выражается деформацией пика корреляции, как в случае погрешности, связанной с движением спутника. Чтобы ограничить ошибку, появляющуюся по причине доплеровского эффекта, продолжительность суммирования функций автокорреляции ограничивают таким образом, чтобы ограничить деформацию пика корреляции.
Чтобы скорректировать доплеровский эффект, связанный с перемещением приемника 4, следует произвести следующее суммирование:
где ƒ(τ) является функцией, которая зависит от движения приемника 4, тогда как это движение приемника неизвестно.
Если истинное положение приемника в момент t обозначить P(t) и положение спутника в момент t обозначить Xs(t), то относительная радиальная скорость между спутником и приемником выражается как 

Чтобы определить показатель надежности, касающийся траектории, оцениваемой приемником GNSS 4, и, следовательно, дороги, по которой движется подвижный объект, оборудованный приемником 4, согласно заявленному способу, на основании сигналов, передаваемых спутниковой группировкой, оценивают положения приемника в разные последовательные моменты при помощи триангуляционного метода, как было указано выше, затем на основании оцениваемых положений выдвигают гипотезу траектории, по которой следует подвижный объект, оборудованный приемником 4, при этом гипотеза траектории состоит в выборе сегмента дороги, проходящего вблизи разных оцениваемых положений, при этом сегмент выбранной дороги может быть, например, платной дорогой R1, за пользование которой выставляется счет, или не платной дорогой R2. Для выдвижения гипотезы траектории приемник 4 содержит картографические средства, позволяющие ему определять дорожную топологию вблизи оцениваемых положений. Затем приемник 4 выдвигает гипотезу скорости перемещения приемника на выбранном сегменте дороги и выводит из нее время Т прохождения на выбранном сегменте дороги 


Для одной и той же гипотезы траектории приемник должен последовательно выдвинуть несколько разных гипотез скорости и для каждой гипотезы скорости определить соответствующее значение показателя надежности, при этом приемник сохраняет только гипотезу скорости, соответствующую наиболее высокому показателю надежности.
На фиг.4 показано влияние коррекции доплеровского эффекта, связанного с движением приемника, в случае, когда гипотеза траектории является реальной траекторией, по которой следует подвижный объект, оборудованный приемником 4, и в случае, когда траектория не соответствует реальной траектории. Сегмент дороги R1 является объектом выставления счета и соответствует дороге, выбранной подвижным пользователем, тогда как сегмент дороги R2 не является объектом для выставления счета. Для двух гипотез и для разных последовательных моментов измерения, соответствующих четырем разным положениям Р1, Р2, Р3, Р4 подвижного объекта на соответствующих сегментах дороги, функции автокорреляции до коррекции доплеровского эффекта показаны сплошными линиями, а функции автокорреляции после коррекции показаны пунктирными линиями. Горизонтальные стрелки показывают перемещение во времени различных функций автокорреляции после коррекции. Приемник сравнивает вероятность движения по сегменту дороги R1 по отношению к сегменту дороги R2. На этой фиг.4 видно, что в случае, когда приемник выдвигает гипотезу движения по сегменту дороги R1, который соответствует реальной траектории подвижного объекта, функция автокорреляции Ct, полученная после коррекции в результате доплеровского эффекта на код расширения приемника, соответствует функции, очень похожей на теоретическую функцию автокорреляции в виде треугольника. В случае, когда приемник выдвигает гипотезу движения по сегменту дороги R2, который не соответствует реальной траектории подвижного объекта, функция автокорреляции Cf, полученная после коррекции в результате доплеровского эффекта на код расширения приемника, очень далека от теоретической функции автокорреляции в виде треугольника.
В альтернативном варианте для одной и той же выбранной гипотезы траектории, вместо того, чтобы выдвигать гипотезы скорости перемещения приемника, приемник можно оборудовать инерциальным датчиком, позволяющим ему оценивать его относительные перемещения и, в конечном итоге, его скорость перемещения на соответствующем дорожном сегменте траектории. В этом случае функцию ƒ(τ) получают при помощи отношения ƒ(τ)=
Наконец, способ в соответствии с изобретением может содержать дополнительный этап, на котором выдвигают дополнительную гипотезу, касающуюся отклонения локальных часов приемника. Эта дополнительная гипотеза состоит в модулировании относительной радиальной скорости между приемником и спутником.
Изобретение было описано в связи с частными вариантами выполнения, но, разумеется, оно не ограничивается этими вариантами и охватывает все технические эквиваленты описанных средств, а также их комбинации, если они не выходят за рамки изобретения.
Изобретение относится к радиотехнике и может использоваться в системах навигации. Технический результат состоит в повышении точности определения показателя надежности. Для этого положение подвижного объекта оценивают на основании приема навигационных сигналов GNSS, передаваемых спутниковой группировкой, навигационные сигналы модулируют при помощи кода, и приемник содержит локальный дубликат кода. Для определения показателя надежности производят оценку скорости перемещения приемника на идентифицированном сегменте траектории, на основании этого выводят функцию доплеровской задержки, соответствующую движению приемника, при помощи функции задержки корректируют функцию автокорреляции навигационного сигнала GNSS, принятого от каждого спутника группировки, сравнивают скорректированную функцию автокорреляции с теоретической функцией автокорреляции, применяя квадратичный критерий, соответствующий показателю надежности. 4 з.п. ф-лы, 6 ил.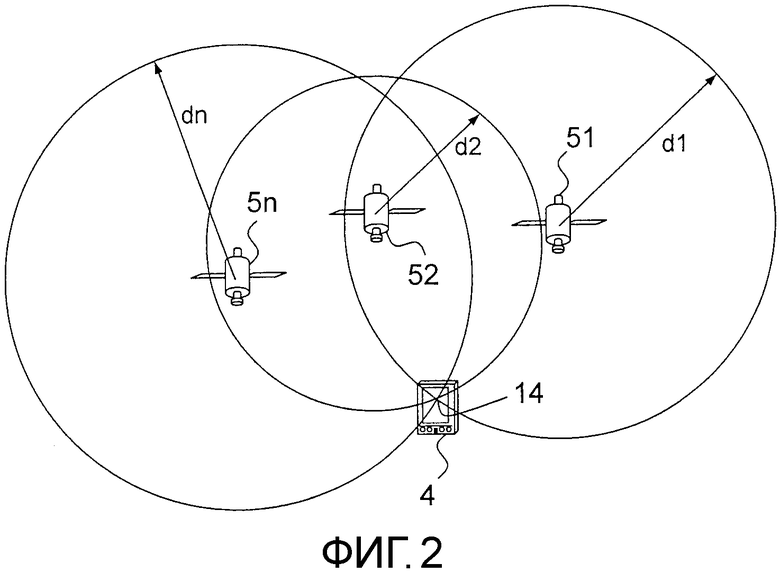
1. Способ определения показателя надежности, связанного с траекторией подвижного объекта, оборудованного приемником, выполненным с возможностью оценки положения подвижного объекта на основании приема навигационных сигналов GNSS, передаваемых спутниковой группировкой, при этом навигационные сигналы модулируют при помощи кода, и приемник (4) содержит локальный дубликат кода, при этом способ отличается тем, что содержит следующие этапы:
a) оценивают последовательные положения приемника (4) в разные моменты измерения положения,
b) идентифицируют сегмент траектории, проходящий вблизи последовательных оцениваемых положений,
c) определяют последовательные функции автокорреляции между принятыми навигационными сигналами и локальным дубликатом кода,
d) выдвигают гипотезу скорости перемещения приемника (4) по идентифицированному сегменту траектории,
e) на основании гипотезы скорости перемещения приемника выводят функцию доплеровской задержки, соответствующую движению приемника (4),
f) применяют функцию доплеровской задержки для каждой функции автокорреляции, определенной на этапе с, и на основании этого выводят скорректированные функции автокорреляции,
g) суммируют скорректированные функции автокорреляции, при этом результат суммирования соответствует скорректированной функции автокорреляции 
h) сравнивают результат суммирования скорректированных функций автокорреляции 
2. Способ определения показателя надежности по п.1, отличающийся тем, что показатель надежности является квадратичным критерием 
3. Способ по одному из пп.1 или 2, отличающийся тем, что он состоит в том, что выдвигают несколько разных гипотез скорости перемещения приемника (4), определяют показатель надежности, соответствующий каждой гипотезе скорости, и выбирают гипотезу скорости, имеющую самый высокий показатель надежности.
4. Способ по одному из пп.1 или 2, отличающийся тем, что скорость перемещения приемника (4) измеряют при помощи инерциального датчика.
5. Способ по п.1, отличающийся тем, что показатель надежности определяют для каждого спутника группировки.
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| US 6072433 A, 06.06.2000 | |||
| US 6356232 B1, 12.03.2002. | |||

