Изобретение касается способа автономного понижения порогов приема и сопровождения кодов расширения спектра, принимаемых на орбите.
Существующий уровень техники в данной области
В соответствии с изобретением осуществляется сочетание трех базовых элементов. Это:
- некоторый приемник сигналов в расширенном или в растянутом спектре,
- некоторый бортовой фильтр определения параметров орбиты,
- некоторая технология понижения порога при помощи точной дополнительной информации о радиальной скорости.
Ниже будут более подробно рассмотрены каждый из трех упомянутых элементов.
Упомянутый приемник может представлять собой любое устройство, принимающее сигналы в расширенном или растянутом спектре на борту искусственного спутника Земли [1], [2]-[5]. Эти сигналы могут быть переданы с других спутников, находящихся на орбите, или со стационарных наземных станций. В качестве таких приемников могут использоваться, например:
- приемник систем GPS GLONASS, GNSS1, GNSS2,
- радиолокационный ответчик в растянутом или широком спектре,
- приемник системы DORIS NG.
Для группы спутников космических систем приемники GPS и GLONASS описаны соответственно в [3] и [4].
Аббревиатура GNSS1 обозначает некоторые геостационарные средства, дополняющие систему GPS и/или GLONASS и использующие навигационную полезную нагрузку спутников типа INMARSAT3. Аббревиатура GNSS2 обозначает перспективную "гражданскую" систему навигационных спутников.
DORIS NG представляет собой проект всемирной космической радионавигационной системы и системы определения местоположения, основанной, в частности, на использовании сигналов в растянутом или широком спектре, передаваемых наземными маяками и принимаемых спутниками на орбите.
Фильтр системы измерения параметров орбиты представляет собой некоторый комплекс цифровой обработки сигналов, локализованный, например, в упомянутом приемнике. В этом фильтре используются непосредственные измерения, выполненные этим приемником, то есть измерения псевдодальности и псевдоскорости по отношению к передатчикам сигналов в растянутом или широком спектре (расположенных на земле или на орбите). Эти измерения подвергаются обработке для определения автономным образом параметров орбиты и/или местоположения и скорости данного спутника-носителя. Определение упомянутых измерений дано в [5]. Упомянутый фильтр может принадлежать, например, к следующим типам:
- фильтр Калмана [6],
- фильтр с простыми наименьшими квадратами,
- фильтр с рекурсивными наименьшими квадратами.
Упомянутый выше фильтр способен также определять следующие параметры:
Di - расстояние между данным спутником и передатчиком сигналов i;
ΔТi - расхождение по времени между задающим генератором упомянутого приемника и задающим генератором передатчика i; - радиальная скорость между данным спутником и передатчиком i;
- радиальная скорость между данным спутником и передатчиком i; - относительный дрейф между задающим генератором передатчика i и задающим генератором приемника.
- относительный дрейф между задающим генератором передатчика i и задающим генератором приемника.
Таким образом, упомянутый фильтр позволяет произвести оценку псевдорасстояний PDi и псевдоскоростей PVi:
PDi=Di+C•ΔTi,
PVi=Vi+C•
Упомянутые выше величины могут быть оценены даже в том случае, если сигналы, поступающие от передатчика i, не обработаны упомянутым передатчиком и соответствующим навигационным фильтром, если только местоположение, скорость и коэффициенты упомянутого передатчика могут быть оценены или известны.
Орбитальная навигационная система производит оценку этих псевдорасстояний и этих псевдоскоростей с точностями δpd и δpv.
Эта орбитальная навигационная система или орбитальное навигационное устройство может принимать дистанционные команды описания маневра данного спутника-носителя. Эти маневры могут быть описаны параметрами ΔVx(to); ΔVy(to) и ΔVz(to), где параметры ΔVi представляют собой компоненты импульса по скорости, предусмотренного в момент времени to.
Маневры спутника описаны с точностями, обозначаемыми как δVx, δVy и δVz для каждой из трех осей. При этом общая точность описания упомянутого маневра δV определяется выражением
Техника понижения порога с использованием точного вспомогательного сигнала по радиальной скорости (или радиальной псевдоскорости) применяется в случае передатчиков, снабженных одним (или несколькими) контуром фазы, сопряженным с одним (или несколькими) контуром кода. При этом предполагается, что упомянутые контуры реализованы по цифровой технологии.
В том случае, когда данный сигнал принимается с отношением C/No, меньшим, чем обычный порог захвата или настройки в режиме поддержанного приема сигналов, контур несущей частоты оказывается открытым или разомкнутым и управляемый цифровым образом генератор колебаний (OCN) в данном случае будет управляться внешним прогнозом радиальной скорости (или внешним прогнозом радиальной псевдоскорости).
Обычный захват сигнала или настройка в режиме поддержанного приема схематически проиллюстрированы в [1].
Этот прогноз радиальной скорости должен быть достаточно точным и достоверным и должен поступать с некоторого датчика, отличного от данного приемника. Упомянутый датчик обычно может представлять собой, например, инерциальную навигационную централь.
Такая техника используется обычно для сопровождения сигналов спутниковой системы GPS с малым эквивалентным отношением C/No, принимаемых военными приемниками системы GPS (код С/А и код Р), устанавливаемыми на военных самолетах, оборудованных инерциальными навигационными централями. Эта техника называется условно "только код", поскольку только псевдослучайный код сопровождается или отслеживается до весьма низких порогов.
Объектом изобретения является способ автономного понижения порогов приема и сопровождения кодов расширения спектра, принимаемых на орбите.
Краткое изложение изобретения
Изобретение касается способа автономного понижения порогов приема и сопровождения кодов расширения спектра, принимаемых на орбите при помощи некоторого приемника, имеющего доступ к некоторому орбитальному навигационному устройству, внутреннему или внешнему по отношению к упомянутому приемнику. Предлагаемый способ отличается тем, что, поскольку упомянутый приемник содержит некоторый контур кода и некоторый контур фазы, этот контур кода в режиме сопровождения псевдослучайных кодов "подталкивается" вспомогательным сигналом скорости и сглаживает погрешность между реальной псевдоскоростью и расчетной псевдоскоростью, при этом этот контур кода в режиме приема псевдослучайных кодов также "подталкивается" вспомогательным сигналом точной скорости, причем поиск фазы принятого кода осуществляется вокруг некоторого прогнозного значения фазы, поддерживаемого этим вспомогательным сигналом скорости.
Способ в соответствии с изобретением содержит следующие этапы:
- упомянутый приемник получает вспомогательные сигналы, необходимые для классического поддержанного приема, которые позволяют этому приемнику захватить (или настроиться на) все сигналы с отношением C/No, удовлетворяющим условию C/No>(C/No)a, где величина (C/No)а представляет собой порог захвата или настройки в классическом поддержанном режиме приема,
- понижают пороги псевдослучайных кодов до некоторой величины (C/No)avf, которая представляет собой порог захвата псевдослучайных кодов в режиме приема, поддержанном точным вспомогательным сигналом по скорости, причем этот точный вспомогательный сигнал скорости поступает из орбитального навигационного бортового устройства.
Cпособ в соответствии с изобретением может содержать некоторый предварительный этап, в ходе которого упомянутый приемник запускается в холодном состоянии без всяких внутренних или внешних вспомогательных сигналов или сообщений и захватывает (или настраивается на) все сигналы с отношением C/No, которое удовлетворяет условию C/No>(C/No)na, где величина (C/No)na представляет собой порог захвата или настройки в режиме без поддержки.
В случае осуществления некоторого маневра, связанного с контролем орбиты данного спутника, орбитальное навигационное устройство принимает описание упомянутого маневра и производит корректировку вспомогательного сигнала скорости, выдаваемого навигационным устройством. Для того, чтобы захват псевдослучайных кодов, принимаемых с малыми значениями отношения C/No, всегда был возможен в случае выполнения маневра, должно соблюдаться следующее условие в первом разряде:
где δpv представляет собой погрешность прогноза псевдоскорости, выдаваемой навигационным устройством в отсутствие маневра, ВF1 представляет собой полосу предварительного детектирования, С представляет собой скорость света и fi представляет собой частоту сигнала несущей, передаваемой передатчиком i.
В том случае, когда псевдослучайный код сопровождается с отношением C/No, отвечающим условию (C/No)avf<C/No<(C/No)a, корректировки характеристических параметров передатчиков сообщаются приемнику при помощи внешних дистанционных команд.
Способ в соответствии с изобретением состоит в понижении порогов приема и сопровождения кодов расширения спектра приемниками для спутников, снабженных некоторым бортовым фильтром определения параметров орбиты. Это понижение порога осуществляется автономным образом упомянутыми приемниками, использующими предлагаемое изобретение. Это понижение порога может быть достаточно существенным.
Краткое описание чертежей
Фиг. 1 представляет собой блок-схему приемника с порогом, понижаемым при помощи точного внешнего сигнала скорости,
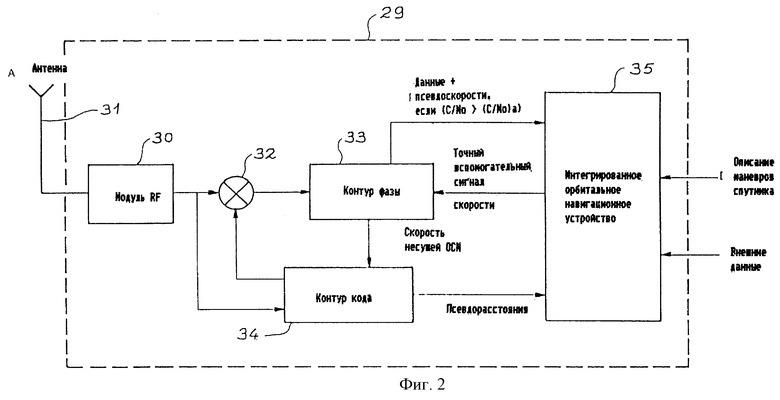
Фиг. 2 представляет собой блок-схему приемника, имеющего в своем составе устройство в соответствии с изобретением,
Фиг. 3 представляет собой блок-схему возможного варианта реализации изобретения.
Подробное изложение способов реализации
Блок-схема на фиг.1 иллюстрирует некоторый приемник в растянутом спектре с порогом, понижаемым при помощи внешнего вспомогательного точного сигнала скорости, причем на фиг.1 представлена только структура цифровой обработки сигналов.
Этот приемник 10 содержит некоторый модуль RF 11, связанный с антенной 12. Выходной сигнал этого модуля подается на вход коррелятора 13, выход которого связан с дискриминатором 14 контура фазы. Сигнал с упомянутого дискриминатора поступает на фильтр контура 15, после чего подается на коммутатор 16. Модуль управляемого цифрового генератора OCN несущей 17 передает некоторую локальную несущую Fi в фазе и в квадратуре, то есть со сдвигом фазы на 90o, на дискриминатор 14 и соединен с другой клеммой коммутатора 16. Этот коммутатор принимает также некоторый сигнал, поступающий с внешнего датчика скорости 18 (в качестве такого датчика может быть использована, например, инерциальная централь).
Упомянутый модуль OCN управляемого цифровым образом генератора несущей частоты посылает сигнал скорости OCN несущей на некоторый первый вход сумматора 19, выход которого связан с некоторым модулем OCN (управляемого цифровым образом генератора) кода 20 и с генератором локального кода 21. Генератор 21 связан, с одной стороны, с коррелятором 13 и подает на него упомянутый локальный код в фазе, а с другой стороны, он связан с дискриминатором контура кода 22 и выдает на него упомянутый локальный код с опережением фазы и упомянутый локальный код с отставанием фазы, причем некоторый фильтр кода G(Р) 23 располагается между выходом дискриминатора 22 и некоторым вторым входом сумматора 19.
Таким образом, в данной схеме имеются некоторый контур фазы 33 и некоторый контур кода 34.
Режим сопровождения
Упомянутый контур кода, работающий в режиме сопровождения псевдослучайных кодов, "подталкивается" вспомогательным сигналом скорости. Другими словами, управляемый цифровым образом генератор OCN этого контура изменяет фазу локального кода со скоростью, равной вспомогательному сигналу внешнего прогноза скорости. "Продвинутый" таким образом контур кода выбирает ошибку между реальной скоростью и вычисленной скоростью.
Команда этого контура должна быть достаточной для поддержания обслуживаемого генератора OCN, что позволяет производить измерения псевдорасстояний.
Режим приема
Упомянутый контур кода, работающий в режиме приема псевдослучайных кодов, также "подталкивается" при помощи точного вспомогательного сигнала скорости. Поиск фазы принятого кода осуществляется вокруг некоторого прогноза фазы (предварительного позиционирования расстояния), поддерживаемого внешним вспомогательным сигналом скорости.
Зона поиска фазы принятого кода оказывается меньшей, чем в случае приема в классическом поддержанном режиме. То же самое можно сказать и о зоне поиска частоты принятой несущей. Действительно, описанный выше принцип действует в том случае, если Доппперовский прогноз ΔFD оказывается меньше упомянутой полосы предварительного детектирования ВF1.
Таким образом, погрешность δpv прогноза псевдоскорости должна удовлетворять следующему соотношению:
ΔFD<ВF1 или 
где С представляет собой скорость света, а fi представляет собой частоту несущего сигнала, передаваемого передатчиком i.
Таким образом, поскольку зоны Допплеровской погрешности и погрешности по расстоянию оказываются значительно меньшими, чем в классических случаях, поиск энергии может осуществляться со значительно меньшей скоростью сканирования локального кода, чем в упомянутых классических случаях, для той же продолжительности поиска Т. Таким образом, порог приема оказывается пониженным. Техника режекции или подавления погрешностей приема должна быть использована в случае одновременного приема нескольких псевдослучайных кодов с различными отношениями C/No.
В данном случае определяются следующие характерные значения отношений C/No:
(C/No)na - порог захвата в не поддержанном режиме;
(C/No)a - порог захвата в классическом поддержанном режиме приема;
(C/No)avf - порог захвата псевдослучайных кодов в режиме приема, поддержанного точным вспомогательным сигналом скорости.
Определение (C/No)na и (C/No)a подробно дано в [1].
Порог (C/No)avf представляет собой функцию нескольких параметров:
(C/No)avf=g(T, δpv, ВF1).
Изобретение характеризуется следующим способом, применяемым в приемнике сигналов в растянутом спектре для спутника, снабженного некоторым орбитальным навигационным устройством.
ЭТАП 1
(факультативный)
Упомянутый приемник запускается в холодном состоянии (без каких бы то ни было внешних или внутренних вспомогательных сигналов или сообщений). Этот приемник захватывает (или настраивается на) все сигналы с отношением C/No, удовлетворяющим следующему условию C/No≥(C/No)na.
Первые захваченные сигналы могут в случае необходимости позволить данному приемнику:
- принять сообщения, позволяющие определить пространственное положение и/или скорость, и/или коэффициенты задающего генератора передатчика i,
- согласовать упомянутое орбитальное навигационное устройство при помощи первых измерений псевдорасстояния и псевдоскорости, реализованных на основе этих первых захваченных сигналов.
Этот первый этап необходим для осуществления полностью автономных космических задач.
ЭТАП 2
Упомянутый приемник получает вспомогательные сигналы, необходимые для классического поддержанного приема. Эти вспомогательные сигналы не отличаются высокой точностью (то есть являются достаточно грубыми) и имеют следующий характер:
1) дата и время задающего генератора приемника,
2) пространственное положение и скорость (или, в случае необходимости, орбитальные параметры) передатчиков,
3) пространственное положение и скорость или орбитальные параметры спутника-носителя.
Эти вспомогательные сигналы могут исходить частично или полностью из этапа 1. В этом случае упомянутые вспомогательные сигналы являются внутренними по отношению к упомянутому приемнику (пример: пространственные положения и скорости передатчиков могут быть переданы самими этими передатчиками) и функция автономии сохраняется.
В том случае, когда все или некоторая часть из этих вспомогательных сигналов в грубом или приблизительном виде сообщаются приемнику с использованием внешних дистанционных команд, он уже не является полностью автономным.
В том случае, когда этап 1 не реализуется, упомянутые вспомогательные сигналы обязательно оказываются внешними по отношению к данному приемнику.
Эти грубые вспомогательные сигналы позволяют данному приемнику захватить (или настроиться на) все сигналы с отношением C/No, удовлетворяющим неравенству C/No>(C/No)a. При этом количество измерений псевдоскорости и псевдорасстояния возрастает по сравнению со случаем этапа 1, поскольку имеет место неравенство (C/No)a<(C/No)na.
Количество упомянутых измерений предполагается достаточным для того, чтобы согласовать упомянутое орбитальное навигационное устройство, выдающее орбитальные параметры спутника-носителя с несколько более высокой точностью, чем это имеет место на этапе 1.
ЭТАП 3
После реализации этапа 2 предполагается, что точность выходных параметров упомянутого орбитального навигационного устройства и характеристических параметров передатчиков сопоставима с точностью упомянутого вспомогательного сигнала скорости, требуемого для еще большего понижения порогов приема псевдослучайных кодов вплоть до величины (C/No)avf.
В отличие от существующего состояния техники в данной области в данном случае точный вспомогательный сигнал скорости поступает из орбитального навигационного устройства, интегрированного в упомянутый приемник. Таким образом, этот вспомогательный сигнал оказывается внутренним и автономность данной системы сохраняется, как это схематически показано на фиг.2.
Таким образом, точность упомянутого орбитального навигационного устройства может быть дополнительно повышена. В то же время, в случае постепенного ухудшения баланса связи с передатчиками снижение упомянутой точности может быть ограничено.
Таким образом, имеем
(C/No)avf<(C/No)a.
ЭТАП 4
В случае маневра, сопряженного с контролем орбиты данного спутника, упомянутое орбитальное навигационное устройство получает описание данного маневра и корректирует вспомогательный сигнал скорости, выдаваемый этим навигационным устройством.
Для того, чтобы захват псевдослучайных кодов, принимаемых с малым отношением C/No, был всегда возможен, в случае выполнения маневра следующее условие обязательно должно быть выполнено в первом разряде:
где δpv представляет собой прогноз псевдоскорости, выдаваемый упомянутым навигационным устройством в отсутствие маневра.
ЭТАП 5
В том случае, когда псевдослучайный код сопровождается с отношением C/No, отвечающим неравенству
(C/No)avf<C/No<(С/Nо)a,
демодуляция данных, переданных передатчиками, оказывается невозможной.
Действительно, эта демодуляция должна быть выполнена контуром несущей (контуром фазы). Однако этот контур оказывается открытым или разомкнутым в том случае, когда отношение C/No удовлетворяет упомянутому выше двойному неравенству.
Коррекции характеристических параметров передатчиков (пространственное положение и/или скорость, и/или коэффициенты задающего генератора), таким образом, должны быть обязательно сообщены упомянутому приемнику при помощи внешних дистанционных команд. Например, в случае использования приемника системы GPS или GLONASS этими параметрами могут быть эфемериды используемого созвездия или группы спутников.
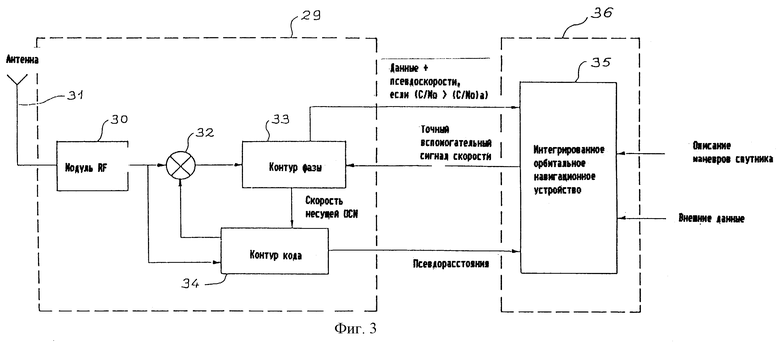
На фиг.2 схематически представлен приемник 29 сигналов в растянутом или расширенном спектре для спутников, который содержит некоторый модуль RF 30, принимающий сигнал от антенны 31. Этот модуль связан с некоторым первым входом коррелятора 32, выходной сигнал которого поступает в контур фазы 33, связанный с контуром кода 34, который принимает также выходной сигнал модуля RF 30, причем выход этого контура кода связан с некоторым вторым входом коррелятора 32. Приемник 29 содержит также некоторое интегрированное орбитальное навигационное устройство 35, которое получает из упомянутого контура фазы данные и псевдоскорости в том случае, если выполняется условие (C/No)>(C/No)a, и которое подает в этот контур фазы некоторый точный вспомогательный сигнал скорости и принимает от контура кода псевдорасстояния.
Упомянутое интегрированное орбитальное навигационное устройство принимает также описание маневров данного спутника и некоторые внешние данные.
На фиг. 3 схематически представлен возможный вариант реализации изобретения, в соответствии с которым упомянутое орбитальное навигационное устройство интегрировано в некоторый бортовой вычислитель 36, имеющийся на данном спутнике.
Примеры практического применения
Применение способа в соответствии с изобретением, касающегося приема сигналов в растянутом или расширенном спектре на борту спутника, имеет отношение к неблагоприятным случаям баланса связи между используемыми в данном случае передатчиками и упомянутым спутником.
Так, например, этими применениями могут быть с точки зрения типов приемников:
- навигация при помощи некоторого приемника существующего созвездия или группы навигационных спутников (например, спутников систем GPS или GLONASS);
- навигация при помощи радиолокационного ответчика в растянутом или расширенном спектре, при этом баланс связи может быть неблагоприятным в начале и в конце пролета некоторой наземной контрольно-измерительной станции (ТМ/ТС);
- навигация при помощи некоторого приемника сигналов в растянутом или расширенном спектре, передаваемых системой наземных радиомаяков, снабженных антеннами с полусферической диаграммой направленности. Мощность, передаваемая этими наземными радиомаяками, предполагается оптимизированной для использования спутниками, находящимися на относительно низких орбитах. Таким образом, баланс связи предполагается менее благоприятным для спутников, располагающихся, например, на геостационарных орбитах;
- прием на орбите сигналов в растянутом или расширенном спектре в условиях, возмущенных другими нежелательными передатчиками радиосигналов. Эквивалентное отношение C/No принятых сигналов уменьшается по сравнению со случаем невозмущенного эфира. Таким образом, баланс связи в этом случае ухудшается и может оказаться необходимым использование способа в соответствии с изобретением.
С другой стороны, применениями способа в соответствии с изобретением с точки зрения орбит могут быть:
- Навигация при помощи некоторого приемника навигационной системы GPS или DORIS NG на орбите геостационарного перевода. Орбита геостационарного перевода или перехода может быть следующих типов:
классическая орбита геостационарного перехода (OTG);
суперсинхронная орбита (OSPS);
субсинхронная орбита (OSBS);
орбита дрейфа (ODD).
Эти типы навигации могут быть реализованы с использованием двух антенн с относительно небольшим коэффициентом усиления, если порог захвата сигналов является достаточно низким (см., например, [7]).
- Навигация при помощи приемника на некоторой орбите с высоким апогеем, которая может представлять собой орбиту следующих типов [8]:
орбита типа "Молния";
орбита типа "Тундра";
орбита типа "Архимед".
- Навигация при помощи некоторого приемника на круговой орбите для созвездия или группы навигационных спутников с периодом орбиты, составляющим двенадцать часов. Прием сигналов наземных радиомаяков, снабженных антеннами с полусферической диаграммой направленности, в этом случае адаптирован.
- Навигация при помощи некоторого приемника, располагающегося на относительно низкой орбите и соединенного с одной или несколькими приемными антеннами относительно небольшой стоимости, не оптимизированными соответствующим образом, но вполне подходящими для того, чтобы позволить данному приемнику реализовать этап 2 в соответствии с изобретением.
Литература
1. "Orbital Navigation With a GPS Receiver On The HETE Spacecraft" (ION GPS janvier 94, pages 645-656).
2. "ESA Dual-Standard S-Band Transponder: A Versatile TT&C Equipment For Communications Via A Data Relay Satellite Or Directly With The Ground Network" de J.L. Gerner (42nd Congress Or The International Astronautical Federation, 5-11 octobre 1991).
3. "Accord de standardisation; caractеristiques du systеme mondial de dеtermination de la position NAVSTAR (GPS)" (OTAN, STANAG 4294).
4. "GLONASS Approaches Full Operational Capability (FOC)" de P. Daly (ION GPS, septembre 1995).
5. "Techniques et technologies des vеhicules spatiaux module 6. Localisation spatiale" (Editions Cеpaduеs).
6. "Low-Orbit Navigation Concepts" de H.James Rome (vol.35, no3, Fall 1988, pages 371-390).
7. "GPS Techniques For Navigation Of Geostationary Satellites" de P. Ferrage, J. L. Issler, G. Campan et J.C. Durand (ION GPS, 12-15 septembre 1995).
8. "Applicability Of GPS-Based Orbit Determination Systems To A Wide Range of HEO Missions" de J. Potti, P. Bernedo et A. Pasetti (ION GPS, 12-15 septembre 1995).
Изобретение касается способа автономного понижения порогов приема и сопровождения кодов расширения спектра, принимаемых на орбите при помощи приемника, имеющего доступ к орбитальному навигационному устройству, внутреннему или внешнему по отношению к данному приемнику, а также контура фазы и контура кода. Контур кода, работающий в режиме сопровождения псевдослучайных кодов, "подталкивается" точным вспомогательным сигналом скорости и выбирает ошибку между реальной скоростью и рассчитанной скоростью. Контур кода, работающий в режиме приема псевдослучайных кодов, также "подталкивается" точным вспомогательным сигналом скорости, причем поиск фазы принятого кода осуществляют около некоторого прогнозируемого значения фазы, поддерживаемого точным вспомогательным сигналом скорости, поступающим из орбитального навигационного устройства. Технический результат, достигаемый при осуществлении способа, состоит в согласовании орбитального навигационного устройства для выдачи орбитальных параметров спутника-носителя с более высокой точностью. 3 з.п.ф-лы, 3 ил.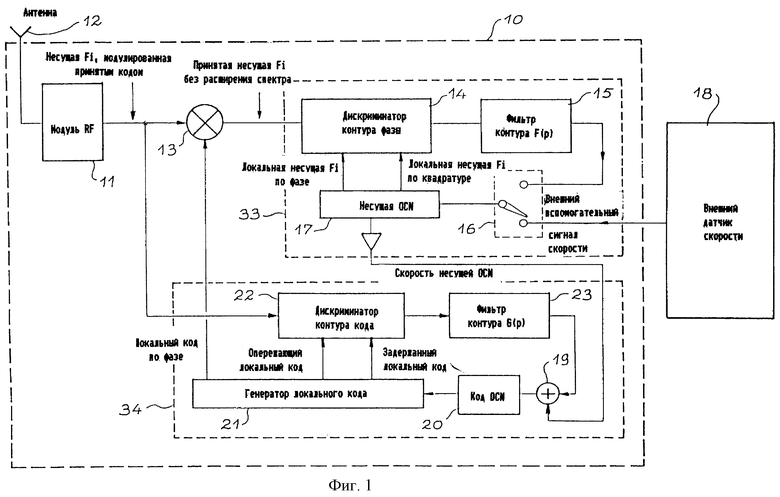
где δpv представляет собой точность псевдоскорости, выдаваемой орбитальным навигационным устройством в соответствие маневра, а δv представляет собой точность описания маневра.
(C/No)avf<C/No<(C/No)a,
корректировки характеристических параметров передатчиков сообщаются приемнику при помощи внешних дистанционных команд.
| УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННОЙ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2012896C1 |
| Способ электрокоагуляции биологической ткани | 1974 |
|
SU552975A1 |
| US 5175557 A, 29.12.1992. | |||

