Область техники
Данное изобретение относится к области радионавигационных систем или позиционирования с помощью спутника, в частности к способу обработки радионавигационных сигналов, переданных спутниками такой системы.
Уровень техники
Системы спутникового позиционирования, такие как GPS (Система глобального позиционирования), Galileo, GLONASS, QZSS, Compass, IRNSS и другие, используют модулированные радионавигационные сигналы, называемые «модуляцией с расширенным спектром». Эти сигналы несут по существу псевдослучайные коды, образованные из периодически повторяющихся числовых последовательностей, основная функция которых заключается в обеспечении возможности коллективного доступа с кодовым разделением каналов (CDMA) и обеспечении измерения времени распространения переданного спутником сигнала. Попутно, радионавигационные сигналы могут также нести полезную нагрузку.
Радионавигационные сигналы образованы модуляцией центральных (несущих) частот. В случае с GPS радионавигационные сигналы передаются на полосе частот L1, с центром на 1575,42 МГц и L2 с центром на 1227,6 МГц. Полоса L5 с центром на 1176,45 МГц была добавлена при обновлении GPS. Спутники группировки Galileo будут передавать на диапазонах E2-L1-E1 (участок среднего диапазона L1 является тем же самым, что и участок GPS), Е5а (который, согласно номенклатуре Galileo представляет диапазон L5, предназначенный для GPS), E5b (с центром на 1207,14 МГц) и Е6 (с центром на 1278,75 МГц).
Основные измерения, которые могут быть осуществлены приемником, включают в себя кодовые измерения и измерения несущей фазы. Эти основные измерения могут, конечно, быть объединены друг с другом. Кодовые измерения являются точными до 1 метра, в то время как фазовые измерения - точными до нескольких мм. Однако фазовые измерения имеют недостаток, заключающийся в том, что они определяют только действительную часть фазовой разности несущей между передачей посредством спутника и приемником. Поэтому фазовые измерения являются неоднозначными в том, что количество полных циклов между спутником и приемником первоначально неизвестно. Чтобы иметь возможность извлечения выгоды из точности фазовых измерений, приемник должен разрешить неоднозначности, присущие этим фазовым измерениям.
Неоднозначности фаз обычно разрешаются посредством дифференцирования фазовых измерений (простым или двукратным дифференцированием). Способ, использующий простые различия между спутниками, описан, например, в статье «GPS carrier phase ambiguity resolution using satellite-satellite single differences» by M.J.Gabor and R.S.Nerem, ION GPS '99, 14-77 September 1999, Nashville, TN. Дифференцирование позволяет устранение (не моделированных) причин ошибок, которые являются общими для множества измерений и, таким образом, раскрывает полную информацию, которая в случае принятия во внимание еще более улучшает производительность. Однако эта полная информация состоит из разностей из одной или нескольких основных неоднозначностей фазы и не позволяет, в целом, обнаружить основные неоднозначности фазы.
Цель изобретения
Целью данного изобретения является разработка способа разрешения неоднозначности фазы недифференциальных измерений, выполненных приемником (на земле или на орбите), исходя из необработанных кодовых и фазовых измерений. Изобретение позволяет приемнику независимо находить неоднозначное значение или значения фазы, то есть без необходимого использования одной или нескольких дифференциаций измерений на местной или глобальной сети.
Общее описание изобретения
В целом изобретение включает в себя два компонента. Во-первых, оно включает в себя способ, который осуществляется на уровне сети опорных станций, во время которого определяется дополнительная информация, с помощью которой не принадлежащий к сети приемник пользователя может разрешить неоднозначности фазы. Во-вторых, изобретение включает в себя способ, который запускается на уровне не являющегося частью сети приемника, который использует дополнительную информацию, формируемую сетью опорных станций и предоставляемую любым типом канала связи.
В первом аспекте на уровне сети станций (опорных приемников), содержащих по меньшей мере одну станцию, изобретение относится к определению задержки спутника, соответствующей задержке во времени и/или смещению частоты и/или разности центров фаз нескомпенсированных соответствующих частот на спутнике между кодом и фазой радионавигационного сигнала. В дальнейшем предполагается случай группировки радионавигационных спутников, каждый из которых передает по меньшей мере два радионавигационных сигнала на двух отдельных диапазонах частот. Поэтому каждый спутник испускает по меньшей мере первый навигационный сигнал на первой частоте и второй навигационный сигнал на второй частоте, которая отличается от первой. Каждая станция, от которой спутник является видимым (то есть выше горизонта), может осуществлять кодовые измерения и фазовые измерения для каждого из двух сигналов, исходящих от соответствующего спутника, и может выводить неисправленное значение для широкополосной неоднозначности. На основе этого неисправленного значения для широкополосной неоднозначности затем определяются внутренняя задержка спутника и полное значение для широкополосной неоднозначности для опорной сети. Следует отметить, что кодовые и фазовые измерения в этом случае являются недифференцированными измерениями (то есть не дифференцированными ни между станциями, ни между спутниками). Здесь очевидно, что внутренние задержки спутников таким же образом оказывают влияние на измерения множества приемников и поэтому исчезают при дифференцировании измерений между двумя приемниками. Следовательно, основанные на дифференциации измерений способы не требуют известности внутренней задержки или внутренних задержек спутника. Наоборот, способ согласно изобретению использует недифференцированные измерения и предлагает точно определять внутреннюю задержку спутника.
Этот способ содержит следующие этапы:
- получение первого и второго радионавигационных сигналов на уровне опорного приемника;
- осуществление посредством опорного приемника и для каждого из первого и второго радионавигационных сигналов недифференциального кодового измерения и недифференциального фазового измерения;
- вычисление неисправленного значения широкополосной неоднозначности из кодовых измерений (недифференцированных) и из фазовых измерений (недифференцированных); и
- установление внутренней задержки вместе с целым числом широкополосной неоднозначности фазы на основе неисправленного значения для опорного приемника.
Предпочтительно, внутренняя задержка спутника вместе с целым числом широкополосной фазовой неоднозначности определяются для каждой доступной комбинации спутник/станция (на данный период не все спутники видимы от каждой станции) из кодовых и фазовых измерений, осуществляемых для каждого из первых и вторых сигналов, образующихся от соответствующих спутников, с помощью соответствующего опорного приемника. Это осуществляется когерентным образом на уровне опорной сети, так что получается набор когерентных самих с собой задержек спутника и задержек станций.
Второй аспект изобретения относится к определению точных параметров хода часов спутника на уровне опорной сети. В этом способе на уровне станций получают первый и второй навигационные сигналы; для каждого из полученных первого и второго сигнала осуществляют недифференциальное кодовое измерение и недифференциальное фазовое измерение; и определяют параметр хода часов спутника из недифференциальных кодовых измерений, недифференциальных фазовых измерений одного или множества целых чисел широкополосной неоднозначности, а также модели дальности распространения между спутником и опорным приемником или приемниками. Чтобы определить целые числа широкополосной неоднозначности, получают внутренние задержки спутника или они вычисляются, как указано выше, и затем из неисправленных измерений широкополосной неоднозначности с помощью внутренних задержек спутника выводятся целые числа. Модель дальности распространения может осуществлять, в частности, точную орбиту спутника, тропосферную задержку, положение станции с принятием во внимание приливов и отливов и т.д. Точные орбиты могут быть определены в виде входного сигнала, если такие орбиты являются доступными. В качестве альтернативы точные орбиты могут быть оценены во время фильтрации.
Параметр хода часов спутника и, если необходимо, точные орбиты спутников группировки оцениваются, предпочтительно, посредством фильтрации из набора кодовых и фазовых измерений на группе станций (обычно 50 станций). Параметрами модели, регулируемыми во время фильтрации этого типа, являются транслируемые параметры хода часов и приемники в каждый период, тропосферное смещение, которое слегка изменяется в течение дня станцией, и узкополосные неоднозначности (параметр, определяемый на каждом прохождении). Предпочтительно, определение параметра хода часов включает в себя оценку параметров модели дальности распространения (таких как, например, точная орбита соответствующего спутника) с помощью недифференциальных кодовых измерений, недифференциальных фазовых измерений и одного или нескольких целых чисел широкополосной неоднозначности и затем оценку параметра хода часов из рассчитанных параметров.
Согласно простому алгоритму фильтрования, который будет описан ниже более подробно, сначала разрешается набор проблем с плавающими неоднозначностями, так что параметры модели, такие как тропосферная задержка и/или точная орбита и т.д., определяются с достаточной точностью. Затем узкополосная неоднозначность выражается в виде функции фазовых измерений, определенной модели, параметров хода часов спутника и параметров хода часов приемника.
Можно принять во внимание, что факт предыдущего установления широкополосной неоднозначности при определении задержек спутника означает, что решаемая проблема при определении параметров хода часов спутника содержит только одну неоднозначность на прохождение вместо двух, как в обычных подходах. Точность модели, необходимая, чтобы сформировать целые числа намного меньше, чем случае, когда неоднозначность заранее не известна. В частности, отсутствует необходимость в модели для ионосферной задержки, так как она может быть устранена посредством сочетания двухчастотных измерений. Тот факт, что ионосферная задержка не является частью модели, уменьшает количество оцениваемых параметров по сравнению с обычными способами. Это образует значительное преимущество способа согласно этому аспекту изобретения.
Задержки спутника и параметры хода часов и, по возможности, также точные орбиты спутников могут ретранслироваться (в зашифрованном или незашифрованном виде) приемникам пользователей посредством подходящих средств, например, наземными вещателями, спутниковыми вещателями (например, со спутников типа SBAS или с самих радионавигационных спутников, если система имеет сигнал, содержащий данные) посредством мобильных телефонов (например, с телефонной ретрансляционной станции), через Интернет, псевдолитами, посредством Wi-Fi, блютус и т.д. Следует отметить, что задержки спутника остаются в течение времени по существу постоянными. Поэтому они могут быть сохранены в базе данных внутри приемника, который получает их из базы данных при необходимости. С другой стороны, точные орбиты и параметры хода часов спутника являются данными, которые изменяются с каждым периодом времени, и затем, предпочтительно, ретранслируются в реальном времени.
Кроме того, изобретение относится к способу, который происходит на уровне любого типа приемника (например, приемник конечного пользователя или приемник сетевой станции). Приемник получает первый и второй радионавигационные сигналы и осуществляет недифференциальное кодовое измерение и недифференциальное фазовое измерение для каждого из первого и второго полученных сигналов. Затем он из недифференциальных кодовых измерений и из недифференциальных фазовых измерений вычисляет неисправленное значение широкополосной неоднозначности фазы и получает внутреннюю задержку спутника. Используя неисправленное значение и внутреннюю задержку спутника, он затем определяет целое число широкополосной неоднозначности.
Согласно предпочтительному варианту способа, который имеет место на уровне приемника, приемник получает точный параметр орбиты и параметр хода часов спутника для спутника и вычисляет целое число узкополосной неоднозначности посредством фильтрации из недифференциальных кодовых измерений, недифференциальных фазовых измерений целого числа широкополосной неоднозначности, параметра орбиты, параметра хода часов спутника и модели дальности распространения между спутником и приемником.
Следует отметить, что внутренняя задержка спутника может быть получена из внутренней или внешней базы данных приемника или из сообщения (в зашифрованном или незашифрованном виде), ретранслированного спутником SBAS или посланного радиотелефонной сетью или ретранслированного наземными вещателями или посредством любых других подходящих средств связи, например, средств, упомянутых выше. Предпочтительно, точные орбиты спутников и параметры хода часов спутников извлекаются из сообщения, ретранслированного спутником SBAS или посланного радиотелефонной сетью или ретранслированного наземными вещателями или посредством любых других подходящих средств связи.
Краткое описание чертежей
Другие отличительные признаки и характеристики изобретения становятся понятными из подробного описания предпочтительного иллюстративного варианта осуществления, представленного ниже со ссылкой на прилагаемые чертежи. На чертежах показаны:
Фиг.1: неисправленные значения широкополосной неоднозначности, вычисленные из кодовых и фазовых измерений;
Фиг.2: остаточные погрешности, полученные после коррекции неисправленных значений широкополосной неоднозначности с внутренними задержками спутника;
Фиг.3: остаточные погрешности узкополосной неоднозначности, полученные обычной фильтрацией;
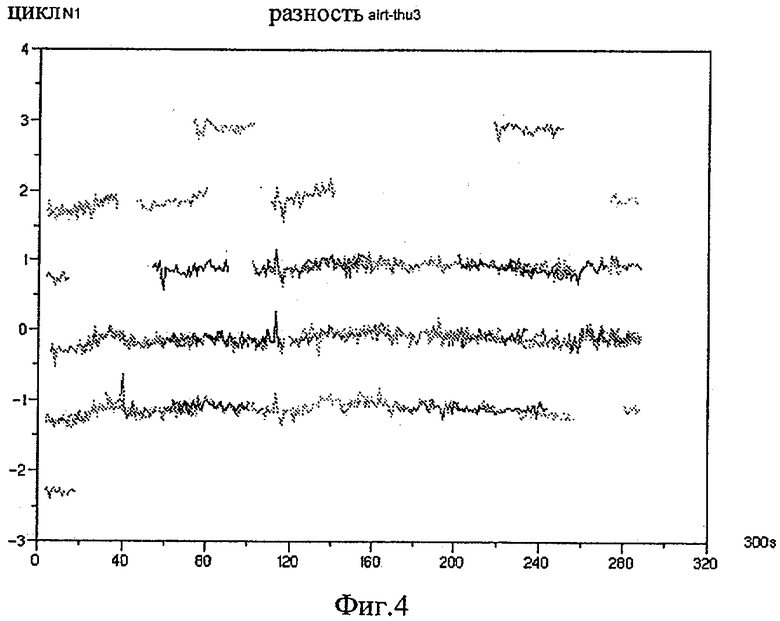
Фиг.4: остаточные погрешности узкополосной неоднозначности, полученные фильтрацией и разложением неоднозначностей сети.
Описание предпочтительного варианта осуществления
Для каждого видимого с приемника спутника на уровне приемника существуют два недифференциальных кодовых измерения (однозначных), далее обозначаемые P1 и P2, два недифференциальных фазовых измерения (неоднозначных), обозначаемые L1 и L2 для частот f1 и f2, соответственно.
Следующие обозначения будут использованы ниже:
 ,
,  ,
, 
где с представляет собой скорость света. Для диапазонов L1 и L2 системы GPS, например, f1=154 f0 и f2=120 f0, где f0=10,23 МГц. Будет использоваться условие, в котором кодовые измерения P1, Р2 выражены в единицах длины, в то время как фазовые измерения L1, L2 выражены в циклах.
Недифференциальные кодовые и фазовые измерения выполняют следующие равенства:
P1=D+(Δс+Δτ)+е+Δh
P2=D+γ(Δc+Δτ)+γe+Δh
λ1L1=D+(Δc+Δτ)-e+Δh+Δb-λ1N1
λ2L2=D+γ{Δc+Δτ)-γe+Δh+Δb-λ2N2
при этом
- D представляет собой количественный параметр, содержащий геометрическую дальность распространения, тропосферные эффекты, эффекты разности от центра фазы, эффекты геометрического вращения фазы (вращение фазы), эффекты относительности и т.д.;
- е содержит элемент ионосферной задержки, который изменяется в виде функции квадрата частоты и который устраняется посредством не зависящего от ионосферы сочетания фазовых и кодовых наблюдаемых величин;
- Δτ=τrec-τeme содержит дифференциал межчастотного отклонения (TGD) между передатчиком и приемником;
- Δс=crec-ceme содержит дифференциал отклонений от центров фазы соответствующего частотного/не зависящего от ионосферы центра фазы между передатчиком и приемником;
- Δh=hrec-heme представляет собой разность между ходами часов приемника hrec и передатчика heme;
- Δb=brec-beme представляет собой разность отклонений приемника brec и передатчика beme (отклонения brec и beme соответствуют разностям хода часов между кодом и фазой); и где
- N1, N2 представляют собой (целые) неоднозначности фазы двух несущих.
(Однозначные) разности фазы между передачей сигналов спутником и получением приемником записаны L1+N1 и L2+N2, где N1 и N2 представляют собой необходимые (целые) неоднозначности. Тогда Nw=N2-N1, Nw является (целой) широкополосной неоднозначностью.
Ионосферная задержка кода рассчитывается по формуле:

Затем:
 и
и 
Эти величины зависят только от измерений.
Так как измерения шумовых кодов являются таковыми, то на шкале одного прохождения (время видимости одного спутника)  и
и  рассеяны по десяти или около этого циклам. Даже посредством расчета среднего числа за одно прохождение N1 и N2 не могут быть оценены правильно. В этом заключается причина того, почему для определения широкополосной неоднозначности используются кодовые измерения.
рассеяны по десяти или около этого циклам. Даже посредством расчета среднего числа за одно прохождение N1 и N2 не могут быть оценены правильно. В этом заключается причина того, почему для определения широкополосной неоднозначности используются кодовые измерения.
Посредством разложения в ряд равенств для и получают:
 и
и 
Неисправленное значение  широкополосной неоднозначности получают по формуле:
широкополосной неоднозначности получают по формуле:

где λw определяется по формуле 1/λw=1/λ1-1/λ2 и соответствует длине волны широкой полосы (примерно 87 см в случае с диапазонами L1 и L2). На фиг.1 показан пример кривых неисправленных значений широкополосных неоднозначностей, происходящих из (недифференциальных) кодовых и фазовых измерений приемника. Для Nw находим выражение формы:

На шкале одного прохождения представляет собой малый шум (ниже части цикла), так что Nw может быть оценен правильно.
Определение внутренних задержек спутника на уровне опорной сети
На уровне опорной сети, содержащей по меньшей мере одну станцию (опорный приемник), неисправленные значения неоднозначности определяются из недифференциальных кодовых и фазовых измерений. Неисправленные значения оцениваются посредством алгоритма оценки на одном прохождении или на части прохождения для того, чтобы уменьшить помехи, получая тем самым оценочное неисправленное значение, обозначаемое  . Алгоритм оценки может быть, например, оценкой средства, оценкой медианы или устойчивой оценкой с возможным отклонением отклоняющихся измерений. Это значение
. Алгоритм оценки может быть, например, оценкой средства, оценкой медианы или устойчивой оценкой с возможным отклонением отклоняющихся измерений. Это значение  может быть разбито на целое число и две дополнительные медленно изменяющиеся величины, которые независимы от измерения и характерны для внутренних задержек спутника и приемника:
может быть разбито на целое число и две дополнительные медленно изменяющиеся величины, которые независимы от измерения и характерны для внутренних задержек спутника и приемника:

В отсутствие дополнительных допущений эта проблема смешанных целых и действительных чисел является единственной, так как разности  являются помехой во всех равенствах, что означает, что
являются помехой во всех равенствах, что означает, что  и
и  определяются только в пределах действительной постоянной. Более того, так как Nw является целым числом на одно прохождение, существуют также целые глобальные своеобразности на уровне
определяются только в пределах действительной постоянной. Более того, так как Nw является целым числом на одно прохождение, существуют также целые глобальные своеобразности на уровне  и
и  .
.
Процесс вычисления начинается посредством выбора первой станции сети, предпочтительно той станции, где известно, что  являются стабильным на протяжении длительного времени. Для этой станции значение
являются стабильным на протяжении длительного времени. Для этой станции значение  устанавливается произвольно, например, принимая
устанавливается произвольно, например, принимая  . Затем сканируются прохождения спутников, которые видимы от этой станции. Для каждого прохождения имеется
. Затем сканируются прохождения спутников, которые видимы от этой станции. Для каждого прохождения имеется  посредством определения от первой станции
посредством определения от первой станции  . Затем
. Затем  разлагается на произвольное целое число (например, ближайшее целое число), обозначаемое Nw, и количественный параметр, который необязательно является целым числом, соответствующим разности
разлагается на произвольное целое число (например, ближайшее целое число), обозначаемое Nw, и количественный параметр, который необязательно является целым числом, соответствующим разности  ), обозначаемый как
), обозначаемый как  . Это дает
. Это дает  спутников, которые являются видимыми от первой станции.
спутников, которые являются видимыми от первой станции.
Для группы спутников, для которых теперь известны внутренние задержки  , возможно оценить задержки
, возможно оценить задержки  других станций. В это время в уравнении
других станций. В это время в уравнении  известно значение
известно значение  . Затем
. Затем  раскладывают на произвольное целое число Nw (от первой станции) и задержку соответствующей станции
раскладывают на произвольное целое число Nw (от первой станции) и задержку соответствующей станции  . Эти этапы повторяются для всех спутников группировки и всех станций опорной сети. В конечном счете, получают значения µeme, которые являются когерентными по всей опорной сети. Значения µeme могут считаться постоянными по меньшей мере один день.
. Эти этапы повторяются для всех спутников группировки и всех станций опорной сети. В конечном счете, получают значения µeme, которые являются когерентными по всей опорной сети. Значения µeme могут считаться постоянными по меньшей мере один день.
Определение параметров хода часов спутника на уровне опорной сети
После определения широкополосной неоднозначности по меньшей мере одна неоднозначность (N1 или N2) остается неизвестной.
Так как широкополосная неоднозначность известна, неоднозначность фазы N1 или N2 может быть разложена значительно проще, прежде всего в отношении необходимых точностей модели.
Измерения P1 и Р2 кодов зависят от множества параметров, включая геометрическое расстояние между точками передачи и приема, ионосферные эффекты, тропосферные эффекты вместе с передающими и принимающими параметрами хода часов. Необходима модель, которая является достаточно точной для этих переменных для того, чтобы идентифицировать остающиеся неоднозначности, и вследствие параметров хода часов потребуется общая резольвента для обрабатываемой сети приемников.
Представим:
 (не зависящий от ионосферы код)
(не зависящий от ионосферы код)
 (не зависящая от ионосферы фаза)
(не зависящая от ионосферы фаза)
где  является оценочным, плавающим, округленным значением N1, полученным, например, посредством вычисления среднего значения или посредством устойчивой оценки с исключением возможных отклоняющихся значений на прохождении или части прохождения количественных параметров N1, оцененных посредством кода и фазы:
является оценочным, плавающим, округленным значением N1, полученным, например, посредством вычисления среднего значения или посредством устойчивой оценки с исключением возможных отклоняющихся значений на прохождении или части прохождения количественных параметров N1, оцененных посредством кода и фазы:
 находится на расстоянии от действительного значения N1 на десять или около этого циклов вследствие измерения помех на коде.
находится на расстоянии от действительного значения N1 на десять или около этого циклов вследствие измерения помех на коде.
Измеренные количественные параметры кода и фазы могут быть связаны с моделированным геометрическим расстоянием D посредством следующих равенств:
Pc=D+hrec-heme
Qc=D+λcδN1+hrec-heme
с λс=(γλ1-λ2)/(γ-1), heme и hrec, соответствующими соответствующим параметрам хода часов передатчиков и приемников (одно значение на дату) и δN1, являющийся коррекцией неоднозначности (одно значение на прохождение,  ). Значение δN1 будет идентифицировано посредством глобальной фильтрации.
). Значение δN1 будет идентифицировано посредством глобальной фильтрации.
Количественные параметры D соответствуют полной модели дальности распространения, использующей следующие элементы:
- комбинация центров двухчастотной фазы: это не зависящая от ионосферы комбинация фазовых центров (L1 и L2) антенны приемника и передатчика;
- точные орбиты спутников;
- закон пространственного расположения спутников (правило номинальной ориентации по рысканию);
- эффекты относительности вследствие эксцентриситета спутников;
- точная модель положения приемника (с моделью земных приливов и отливов);
- модель тропосферной задержки (вертикальная задержка на каждую станцию с функцией свертки, зависящей от места, как определено в Stanag (Standardization Agreement - «Соглашение по стандартизации»));
- модель вращения (геометрическое вращение фазы).
Параметры, оцениваемые фильтром:
- на каждом периоде параметры хода часов heme и hrec спутников и станций;
- для каждого прохождения постоянная неоднозначность δN1 фазы (без ограничения, что это целое число);
- вертикальная тропосферная задержка для каждой станции с небольшим изменением со временем (обычно постоянный сегмент каждые 4 часа);
- точные орбиты спутников (если точные орбиты не предоставлены в виде входных данных).
Фильтр может быть в виде фильтра, основанного на методе наименьших квадратов, или в виде фильтра Кальмана, более совместимого для обработки в режиме реального времени. Входные величины для фильтрования являются недифференцированными величинами не зависящего от ионосферы кода и не зависящей от ионосферы фазы с их соответствующими помехами, которые равны примерно 1 м для кода и 1 см для фазы.
В конце этого этапа по формуле (Qc-D-(hrec-heme))/λс вычисляются оценки идентифицированных остаточных погрешностей δN1. Некоторые примеры остаточных погрешностей δN1 показаны на фиг.1. (δN1 не являются целыми числами, так как во время фильтрования не было произведено допущений на целых числах.)
Этот этап фильтрования служит, прежде всего, для точного вычисления члена D (геометрическая модель). Идентифицированные на этом этапе параметры хода часов используются впоследствии в качестве начальных значений, тем самым позволяя производить работу на небольших вариациях параметров хода часов, но это не является обязательным.
Получив посредством фильтрации значение D, происходит поиск целых чисел δN1 на уровне опорной сети. Снова используется следующее равенство:
Qc=D+λcδN1+hrec-heme (*)
где D теперь принимает значение, найденное посредством фильтрации. Можно отметить, что равенство обладает глобальной ненаблюдаемостью. В действительности, возможно сдвинуть имеющие отношение к данному передатчику значения δN1 и соответствующие значения heme и/или hrec посредством сохранения имеющего силу равенства:
Qc=D+λc(δN1+α)+(hrec-λcα)-heme
На этом этапе значения heme вычисляются посредством итеративного процесса начиная с первой станции (первый опорный приемник), параметр хода часов которой принимается в качестве опорного параметра хода часов, и посредством последовательного добавления станций для заполнения всей сети.
Для первой станции устанавливается δN1=0 и hrec=0. Этот выбор является произвольным и приводит к набору heme для спутников, которые являются видимыми с первой станции, так что выполняется равенство (*).
Добавление станции осуществляется следующим образом. С помощью известного перед добавлением станции набора heme вычисляют остаточные погрешности δN1+hrec/λc, которые должны быть выражены в форме целого числа на прохождение (δN1), и действительное значение в каждый период (соответствующее параметру хода часов hrec добавленной станции). На фиг.2 показаны остаточные погрешности δN1+hrec/λс для вновь добавленной станции.
Можно увидеть, что остаточные погрешности разделены целыми числами и что их смещение по отношению к ближайшему целому числу является идентичным. Поэтому можно утверждать, что сдвиг между остаточными погрешностями и ближайшим целым числом соответствует hrec/λc, и само целое число соответствует δN1.
Следует отметить, что для новой станции параметры хода часов спутника и тем самым остаточные погрешности δN1+hrec/λc известны априори только для части прохождений. Однако так как δN1 является постоянным на прохождение, его можно распространить на все прохождение. Периоды, при которых данный спутник виден с одной станции, только частично соответствуют периодам, при которых тот же самый спутник виден с соседней станции. Чем больше расстояние между станциями, тем меньше обычные периоды наблюдения. Это подразумевает, что по меньшей мере к одной из предыдущих станций всегда добавляется соседняя станция.
Наконец, для группы прохождений для всех станций сети идентифицируется набор δN1 целых чисел. Затем равенство (*) может быть решено для группы прохождений и для всех станций сети с heme и hrec в качестве единственных неизвестных.
Описанный в этой части способ идентификации для heme проходит в автономном режиме (off-line), но специалисту было бы понятно, как осуществить эквивалентный способ, проходящий в реальном времени (real-time). Например, посредством идентификации целочисленной неоднозначности при каждом поступлении нового прохождения, посредством накопления адекватных измерений этого прохождения и при условии, что текущее решение для параметров хода часов спутника само является целым числом, затем целое число неоднозначности появится непосредственно в измерениях остаточных погрешностей.
Решение фазовых неоднозначностей на уровне (одиночного) приемника
Любой приемник может решить широкополосную неоднозначность, если ему известны µeme видимых спутников. Приемник осуществляет недифференцированные кодовые и фазовые измерения и находит тем самым неисправленные значения широкополосной неоднозначности (показано на фиг.1). Для одного прохождения (или части прохождения) он вычисляет среднее неисправленное значение широкополосной неоднозначности и выводит целую широкополосную неоднозначность посредством решения уравнения:

где µeme теперь является известным параметром. Приемник может получать значения µeme любыми доступными средствами. Например, он может загружать их из внешней базы данных (например, с интернет-сайта). Поскольку эти значения очень мало изменяются со временем, они, полученные однажды, могут использоваться в течение долгого времени при условии, что они хранятся внутри приемника. На фиг.2 показаны остаточные погрешности  , полученные после коррекции неисправленных значений широкополосной неоднозначности фиг.1 с соответственно известными внутренними задержками µeme спутника. Можно видеть, что среднее или срединное значение остаточной погрешности для каждого прохождения найдено около того же значения (не обязательного целого), общего для всех прохождений (0,7 в представленном случае). Поэтому дробная часть этого общего значения дает µrec, тогда как целая часть дает целую широкополосную неоднозначность Nw.
, полученные после коррекции неисправленных значений широкополосной неоднозначности фиг.1 с соответственно известными внутренними задержками µeme спутника. Можно видеть, что среднее или срединное значение остаточной погрешности для каждого прохождения найдено около того же значения (не обязательного целого), общего для всех прохождений (0,7 в представленном случае). Поэтому дробная часть этого общего значения дает µrec, тогда как целая часть дает целую широкополосную неоднозначность Nw.
Решение для узкополосной неоднозначности на уровне (одиночного) приемника основано на уравнениях:
Pc=D+hrec-heme
Qc=D+λcδN1+hrec-heme
Чтобы определить δN1, приемнику необходимо знать параметры хода часов спутника, а также точные орбиты для данного срока наблюдения (точные орбиты являются частью модели для D). Предпочтительно, эти параметры хода часов спутника и/или точные орбиты транслируются наземной трансляцией или со спутника SBAS (Satellite-Based Augmentation System).
Сначала приемник определяет значение D посредством фильтрации, основанной на модели, аналогичной упомянутой ранее. Во время этого этапа вычисления для D приемнику в целом необходимо оставаться неподвижным. Затем приемник оценивает свои параметры хода часов приемника и δN1. Затем он принимает (решение) при значениях для N1 посредством  и при значениях для N2 посредством N2=Nw+N1.
и при значениях для N2 посредством N2=Nw+N1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ОБЪЕКТА, ИМЕЮЩЕГО ПРИЕМНИК ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ, ПОСРЕДСТВОМ ОБРАБОТКИ НЕРАЗНОСТНЫХ ДАННЫХ, ПОДОБНЫХ ИЗМЕРЕНИЯМ ФАЗЫ НЕСУЩЕЙ, И ВНЕШНИХ ДАННЫХ, ПОДОБНЫХ ИОНОСФЕРНЫМ ДАННЫМ | 2011 |
|
RU2565386C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| Система для определения скорости распространения и направления прихода ионосферного возмущения | 2016 |
|
RU2655164C2 |
| НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ РАЗРЕШЕНИЯ ЦЕЛОЧИСЛЕННЫХ НЕОДНОЗНАЧНОСТЕЙ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧЕНИЯ НЕОДНОЗНАЧНОСТИ ДВОЙНОЙ РАЗНОСТИ | 2011 |
|
RU2591953C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ И УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ ВЫСОКОЙ ТОЧНОСТИ - КИНЕМАТИКИ В РЕАЛЬНОМ ВРЕМЕНИ (PPP-RTK) | 2018 |
|
RU2759392C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |


Изобретение относится к области радионавигационных систем, а именно, к обработке радионавигационных сигналов, переданных спутниками таких систем, и может быть использовано в навигационном приемнике. Технический результат заключается в разрешении неоднозначности фазы недифференциальных измерений без использования одной или нескольких дифференциаций измерений на местной или глобальной сети. Для этого каждый из спутников группировки спутников на различных частотах передает первый и второй радионавигационный сигнал соответственно, а каждая станция опорной сети, от которой спутник является видимым, выполняет недифференциальные измерения кода и фазы для каждого из двух исходящих от спутника сигналов и выводит из этого неисправленное значение широкополосной неоднозначности. На основе этого неисправленного значения устанавливается внутренняя задержка спутника и целое число широкополосной неоднозначности в сети. 3 н. и 12 з.п. ф-лы, 4 ил.
1. Способ обработки радионавигационных сигналов, которые исходят от спутника группировки радионавигационных спутников, при этом спутник транслирует по меньшей мере первый радионавигационный сигнал на первой частоте и второй радионавигационный сигнал на второй частоте, которая отличается от первой,
при этом в способе на уровне опорной сети, содержащей по меньшей мере один опорный приемник, от которого виден указанный спутник, определяют внутреннюю задержку спутника и целое число широкополосной фазовой неоднозначности для опорного приемника, и это определение внутренней задержки спутника и целого числа широкополосной фазовой неоднозначности включает в себя шаги:
получение первого и второго радионавигационного сигнала на уровне опорного приемника;
осуществление посредством опорного приемника и для каждого из первого и второго радионавигационных сигналов недифференциального кодового измерения и недифференциального фазового измерения;
вычисление неисправленного значения для широкополосной фазовой неоднозначности из недифференциальных кодовых измерений и из недифференциальных фазовых измерений;
установление внутренней задержки спутника вместе с целым числом широкополосной фазовой неоднозначности на основе неисправленного значения для опорного приемника.
2. Способ по п.1, в котором опорная сеть содержит несколько опорных приемников, от которых в любое время видны несколько спутников группировки, при этом каждый из этих спутников транслирует по меньшей мере первый радионавигационный сигнал на первой частоте и второй радионавигационный сигнал на второй частоте,
при этом в способе для каждой из доступных комбинаций спутник/опорный приемник когерентным образом на уровне опорной сети посредством опорного приемника определяют внутреннюю задержку спутника и целое число широкополосной фазовой неоднозначности на основании неисправленного значения для широкополосной фазовой неоднозначности, вычисленной из кодовых и фазовых измерений, выполненных для каждого из первого и второго сигналов, исходящих от соответствующего спутника.
3. Способ по п.1, содержащий этап трансляции определенной внутренней задержки спутника.
4. Способ обработки радионавигационных сигналов, которые исходят от спутника группировки радионавигационных спутников, при этом спутник транслирует по меньшей мере первый радионавигационный сигнал на первой частоте и второй радионавигационный сигнал на второй частоте, которая отличается от первой,
при этом способ на уровне опорной сети, содержащей один или несколько опорных приемников, от которых виден указанный спутник, содержит этапы:
получение первого и второго радионавигационного сигнала на уровне опорного приемника или приемников;
осуществление посредством опорного приемника или приемников и для каждого из первого и второго радионавигационных сигналов недифференциального кодового измерения и недифференциального фазового измерения;
определение параметра хода часов спутника из недифференциальных кодовых измерений, недифференциальных фазовых измерений, одного или нескольких целых чисел широкополосной фазовой неоднозначности, а также модели дальности распространения между спутником и опорным приемником или приемниками.
5. Способ по п.4, в котором определение параметра хода часов спутника содержит этапы:
получение внутренней задержки спутника в отношении указанного спутника; и
определение целого числа широкополосной фазовой неоднозначности, основанной на неисправленном значении для широкополосной фазовой неоднозначности и внутренней задержке спутника.
6. Способ по п.4, в котором определение параметра хода часов спутника содержит оценку параметров модели для дальности распространения, используя кодовые измерения, фазовые измерения и одно или несколько целых чисел широкополосной фазовой неоднозначности, и последующую оценку параметра хода часов спутника из оцененных параметров.
7. Способ по п.6, в котором оценка параметров модели для дальности распространения включает в себя определение точной орбиты в отношении спутника.
8. Способ по п.4, содержащий трансляцию определенного параметра хода часов спутника.
9. Способ по п.7, содержащий трансляцию определенной точной орбиты.
10. Способ обработки радионавигационных сигналов, которые исходят от спутника группировки радионавигационных спутников, при этом спутник транслирует по меньшей мере первый радионавигационный сигнал на первой частоте и второй радионавигационный сигнал на второй частоте, которая отличается от первой,
при этом способ на уровне приемника, от которого виден указанный спутник, содержит этапы:
получение первого и второго радионавигационных сигналов;
осуществление для каждого из первого и второго полученных сигналов недифференциального кодового измерения и недифференциального фазового измерения;
вычисление неисправленного значения для широкополосной фазовой неоднозначности из недифференциального кодового измерения и недифференциального фазового измерения;
получение внутренней задержки спутника в отношении спутника; и
определение целого числа широкополосной фазовой неоднозначности, основанное на неисправленном значении и внутренней задержке спутника.
11. Способ по п.10, в котором внутреннюю задержку спутника получают из базы данных.
12. Способ по п.10, в котором внутреннюю задержку извлекают из сообщения, транслируемого спутником SBAS, или посылаемого радиотелефонной сетью, или транслируемого наземными трансляторами.
13. Способ по п.10, содержащий этапы:
получение параметра орбиты и параметра хода часов спутника в отношении спутника;
оценка целого числа узкополосной неоднозначности посредством фильтрации из недифференциальных кодовых измерений, недифференциальных фазовых измерений целого числа для широкополосной неоднозначности, параметра орбиты, параметра хода часов спутника, а также модели дальности распространения между спутником и приемником.
14. Способ по п.13, в котором параметр орбиты и параметр хода часов получают из базы данных.
15. Способ по п.13, в котором параметр орбиты и параметр хода часов извлекают из сообщения, транслируемого спутником SBAS, или посылаемого радиотелефонной сетью, или транслируемого наземным транслятором.
| Michael J.Gabor, R.Steven Nerem «GPS Carrier Phase Ambiguity Resolution Using Satellite-Satellite Single Differences», 17.09.1999 | |||
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| Michael J.Gabor, R.Steven Nerem «Characteristics of Satellite-Satellite Single Difference Widelane Fractional Carrier Phase Biases», 22.09.2000 | |||
| US 5148179 A, 15.09.1992 | |||
| WO 2006073490 A2, 13.07.2006 | |||
| JP 2006010573 A, 12.01.2006. | |||

