Изобретение относится к спутниковым навигационным системам (СНС) позиционирования, в частности к предоставлению позиционной информации в местах недосягаемости радиосигналов СНС GPS, ГЛОНАСС, Galileo, Compass, GAGAN, QZSS, и может быть использовано в системах позиционирования в экранированном пространстве, например, в подземных переходах, станциях метро, внутри помещений, тоннелях, ущельях и т.д.
СНС, такие как GPS, ГЛОНАСС, Galileo, Compass, GAGAN, используются в мировом масштабе пользователями для определения своего местоположения в пространстве. Каждая СНС включает в себя ряд навигационных космических аппаратов (НКА), вращающихся вокруг Земли, причем каждый НКА передает радиосигналы с навигационными сообщениями, содержащими эфемеридную информацию с метками времени и альманахом.
Используя информацию навигационных сообщений, принятых навигационной аппаратурой потребителей (НАП), в частности приемником сигналов СНС, и измерения псевдодальностей до нескольких выбранных НКА, устанавливают функциональные зависимости между известными координатами НКА и неизвестными координатами пользователей СНС. Оценка координат пользователей сводится к решению навигационной задачи.
Нередко сигналы, излучаемые НКА СНС, не могут быть приняты с помощью НАП, ввиду различных препятствий, например, внутри помещений или в экранированных пространствах.
Известно техническое решение (1 аналог) - способ и система позиционирования, патент Российской Федерации на изобретение №2161318 от 27.12.2000 г., которое предлагает систему и способ определения положения для использования в экранированном пространстве. Система включает в себя GPS-приемник для получения GPS-сигналов и передачи навигационных данных, блок восстановления тактовой синхронизации для получения навигационных данных и восстановления точного временного сигнала, компьютерный процессор для получения точного временного сигнала и навигационных данных и, по меньшей мере, четыре псевдоспутника, установленные внутри экранированного пространства, причем по меньшей мере, один из четырех псевдоспутников - не компланарный относительно других. Способ обеспечения внутренней системы позиционирования включает следующие шаги: получение сигналов GPS, восстановление сигнала точного времени из сигналов GPS, вычисление орбитальных параметров для, по меньшей мере, четырех псевдоспутников и передачу сигналов данных псевдоспутников, используя восстановленный сигнал времени и орбитальные параметры для, по меньшей мере, четырех псевдоспутников, формирование информации навигационных данных (NAVDAT) из принятых сигналов GPS, использование информации навигационных данных (NAVDAT) для вычисления орбитальных параметров псевдоспутников и внесение смещения в навигационную информацию (NAVDAT) при вычислении орбитальных параметров, дополнительно включает задержку в восстановленном сигнале времени для учета различного времени прохождения сигнала к каждому из псевдоспутников. Недостатком данного технического решения является то, что система позиционирования принимает сигналы псевдоспутников одной СНС (GPS), при этом необходимо использовать приемник сигналов СНС со специализированным программным обеспечением для обработки сигналов псевдоспутников. Также недостатком является сложность системы, которая увеличивает время получения решения навигационной задачи, и сложность обеспечения высокой точности позиционирования.
Известно техническое решение (2 аналог) - система и способ для ретранслятора системы GPS («SYSTEM AND METHOD FOR GLOBAL POSITIONING SYSTEM REPEATER»), заявка США на изобретение №20060208946 от 21.09.2006 г., которое содержит направленную приемную антенну для приема GPS сигналов от одного или более спутников в предварительно выбранной области неба, передающую антенну для передачи полученных GPS сигналов, и радиочастотный усилитель, для повышения уровня усиления полученных GPS сигналов перед передачей в помещение. Один или несколько таких ретрансляторов GPS используются для воспроизведения спутниковой группировки внутри зданий или под землей, чтобы обеспечить охват СНС GPS в этих средах. Недостатком данного технического решения является использование сигналов одной СНС (GPS), причем система, описанная в изобретении использует направленные приемные антенны, охватывающие различные сегменты небесной полусферы. Данное техническое решение не обладает высокой точностью позиционирования.
Известно техническое решение (3 аналог) - система предоставления позиционной информации, устройство и передатчик предоставления позиционной информации, патент Российской Федерации на изобретение №2440590 от 10.05.2010 г., которое позволяет предоставить позиционную информацию без потери точности даже в местах вне досягаемости радиосигналов НКА, обеспечивает необходимость синхронизации во времени с НКА. Для этого процесс, выполняемый с помощью устройства предоставления позиционной информации, включает в себя этапы: получения принятого сигнала позиционирования, специфицирования источника излучения сигнала позиционирования, получения, когда источник излучения сигнала позиционирования находится вне помещения, сообщения навигации, включенного в сигнал позиционирования, выполнения процесса, предназначенного для вычисления позиции на основании сигнала, получения, когда источник излучения сигнала позиционирования находится внутри помещения, данных сообщения из сигнала позиционирования, получения значения координат из данных и отображения позиционной информации на основании значений координат. Недостатком данного изобретения является то, что принятые сигналы от НКА подвергаются в передающем устройстве модификации, а это усложняет построение НАП, в частности приемника сигналов СНС и увеличивает время получения решения навигационной задачи.
В качестве прототипа выбрана система позиционирования внутри помещений на основе сигналов глобальной системы позиционирования (GPS) и псевдоспутников с наружными направленными антеннами («INDOOR POSITIONING SYSTEM BASED ON GPS SIGNALS AND PSEUDOLITES WITH OUTDOOR DIRECTIONAL ANTENNAS»), международная заявка на изобретение №2011080541 от 07.07.2011 г. Это изобретение содержит три приемных антенны GPS, предназначенные для приема GPS сигналов, исходящих, по меньшей мере, от трех GPS спутников, по меньшей мере, три радиочастотных (РЧ) GPS ретранслятора, предназначенные для усиления сигналов GPS исходящих из направленных приемных GPS антенн, причем РЧ GPS ретранслятор состоит из полосового фильтра для снижения уровня шума, малошумящего усилителя для усиления сигнала GPS, линии передачи для передачи сигналов от приемных антенн GPS к излучающим антеннам GPS, по меньшей мере, три GPS излучающих антенны, предназначенные для передачи GPS сигналов поступающих из РЧ GPS ретрансляторов в экранированное пространство, по меньшей мере, один GPS приемник, предназначенный для приема GPS сигналов, поступающих от излучающих GPS антенн, антенна GPS приемника и способ определения позиции, включающий следующие операции: прием сигналов позиционирования НКА GPS (псевдодальности и цифровой информации), получение данных из сигнала позиционирования (цифровой информации) о положении каждого НКА, выполнение обработки навигационных сообщений, вычисление позиции (координат) и времени UTC (Всемирное координированное время) GPS НАП.
Недостаток данного изобретения заключаются в том, что при попадании в экранированное пространство приемник сигналов GPS должен получить данные о местоположении излучающих антенн (псевдоспутников) либо выделить информацию об их местоположении из принятого сигнала. При этом данные орбит НКА, полученные приемником сигналов GPS при нахождении во внешнем навигационном поле, никак не используются, поэтому однозначно будет перерыв в определении позиции. Это один из важных факторов сдерживания широкого применения псевдоспутников.
Задачей изобретения является повышение точности позиционирования в экранированном пространстве, используя сигналы СНС, например, GPS, ГЛОНАСС, Galileo, Compass, GAGAN.
Дополнительной задачей изобретения является создание способа и системы, которые позволят сформировать навигационное поле соответствующее внешнему навигационному полю и обеспечат непрерывное решение навигационной задачи при переходе из внешнего навигационного поля во внутрь экранированного пространства.
Еще одной дополнительной задачей данного изобретения является увеличение числа ситуаций, в которых могут использоваться способ и система мультичастотного позиционирования в экранированном пространстве, основанные на СНС позиционирования и определения местоположения.
Поставленные задачи решаются за счет того, что в способе мультичастотного позиционирования в экранированном пространстве одновременно выполняют прием сигналов позиционирования для диапазонов частот СНС: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS, при этом диапазон частот L1 GPS может быть заменен на диапазон частот L1 Galileo, а диапазон частот L5 GPS на Е5а Galileo; причем каждый из используемых сигналов переизлучают отдельным частотно-избирательным ретранслятором, выделяющим с помощью полосового фильтра только используемую полосу частот, приемной и излучающей антенной; одновременно получают цифровую информацию из всех принятых сигналов позиционирования; одновременно вычисляют позицию (координаты) и текущее время UTC отдельно для каждого из принятых диапазонов частот СНС: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS, при этом диапазон частот L1 GPS может быть заменен на диапазон частот L1 Galileo, диапазон частот L5 GPS на Е5а Galileo, причем полученные разные координаты соответствуют координатам приемных антенн, а время полученное в процессе вычисления каждой координаты равно сумме времени UTC, времени задержки в ретрансляторе и времени распространения сигнала от излучателя до приемника; причем для повышения точности позиционирования время распространения сигнала от приемной к передающей антенне выравнивают любым из известных способов (например подбирая длину кабеля); сравнивают полученные координаты для каждого диапазона соответствующей СНС, причем совпадение координат соответствует тому, что мультичастотный приемник находится во внешнем реальном навигационном поле, а расхождение координат соответствует тому, что мультичастотный приемник расположен в экранированном пространстве; решают задачу определения позиции антенны мультичастотного приемника, причем для этого используют координаты излучающих антенн, которые соответствуют координатам, полученным для каждого диапазона частот соответствующей СНС, и разность времени распространения сигналов между антеннами.
Данный способ реализуется системой мультичастотного позиционирования в экранированном пространстве, в котором ретрансляторы выполнены частотно-избирательными, причем каждый из используемых сигналов переизлучается отдельным частотно-избирательным ретранслятором, выделяющим с помощью фильтра только используемую полосу частот, приемной и излучающей антенной, причем излучающие антенны располагаются в разных местах экранированного помещения соосно с приемными антеннами, приемник сигналов СНС выполнен мультисистемным с возможностью приема сигналов СНС, по меньшей мере, в трех различных частотных диапазонах из следующего набора: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS и обеспечивает определение координат и времени отдельно и одновременно по каждому из принимаемых диапазонов частот.
Также в частотно-избирательных ретрансляторах системы прием-передача диапазона частот L1 GPS может быть заменен на L1 Galileo, a L5 GPS на Е5а Galileo.
Также в частотно-избирательных ретрансляторах системы полосы пропускания фильтров, выделяющие рабочий диапазон частот, не должны пересекаться по частоте.
Также в системе приемные антенны и излучающие антенны сигналов СНС имеют одинаковые координаты соответственно, причем время распространения сигнала от приемной до излучающей антенны одинаковое.
Также в приемнике сигналов СНС системы частотный диапазон L1 GPS может быть заменен на частотный диапазон L1 Galileo, а частотный диапазон L5 GPS на частотный диапазон Е5а Galileo.
Также приемник сигналов СНС системы выполнен с возможностью решения навигационной задачи по разности времени распространения сигнала СНС от излучающих антенн, расположенных, по меньшей мере, в трех различных точках экранированного пространства.
Экранированное пространство системы имеет размеры, многократно превышающие длину волны сигналов используемых НКА, а излучающие антенны располагаются в верхней части экранированного пространства на максимальном удалении друг от друга.
Техническим результатом является повышение точности позиционирования в экранированном пространстве используя сигналы СНС, например, GPS, ГЛОНАСС, Galileo, Compass, GAGAN и обеспечение непрерывного решения навигационной задачи при переходе из внешнего навигационного поля СНС во внутрь экранированного пространства с помощью системы мультичастотного позиционирования в экранированном пространстве.
Дополнительным техническим результатом является получение координат позиционирования без использования любых источников данных об излучающих антеннах в экранированном пространстве, включая базы данных.
Дополнительным техническим результатом является расширение области применения мультичастотной и мультисистемной НАП, а именно, позволяет использовать обычные мультисистемые, многочастотные приемники сигналов СНС для позиционирования в экранированном пространстве, без изменения их структуры.
Дополнительным техническим результатом является использование одних и тех же сигналов НКА СНС (псевдодальностей, цифровой информации) для позиционирования вне и внутри экранированного пространства.
Дополнительным техническим результатом является увеличение числа ситуаций, в которых могут использоваться глобальные навигационные системы позиционирования.
На фиг.1 представлена структурная схема системы мультичастотного позиционирования в экранированном пространстве, которая содержит 1, 4, 7 - приемные антенны, 2, 5, 8 - полосовые фильтры, 3, 6, 9 - малошумящие усилители, 10 - экранированное пространство, 11, 12, 13 - излучающие антенны, 14 - мультичастотный приемник сигналов СНС, 15 - антенна мультичастотного приемника сигналов СНС.
Способ и система мультичастотного позиционирования в экранированном пространстве реализуются следующим образом.
В экранированном пространстве (10), имеющем размеры, многократно превышающие длину волны используемых сигналов СНС, в верхней части, на максимальном удалении друг от друга располагаются излучающие антенны (11, 12 и 13) в количестве не менее трех. К каждой излучающей антенне подключен, через линию передачи, длина которой подобрана таким образом, чтобы обеспечить одинаковую задержку сигналов от приемной до передающей антенны, соответствующий частотно-избирательный ретранслятор. Ретранслятор состоит из малошумящего усилителя соответственно (3, 6, 9), усиление которого подбирается таким образом, чтобы компенсировать потери в тракте от приемной антенны (1, 4, 7) до излучающей антенны (11, 12, 13), и полосового фильтра (2, 5, 8), позволяющего выделить один из частотных диапазонов СНС, например, L1 ГЛОНАСС, или L1 GPS, или L2 ГЛОНАСС, или L2 GPS. Полосовые фильтры подключаются к приемным антеннам соответственно.
Приемник сигналов СНС (14) с антенной приемника сигналов СНС (15), попадая в сформированное таким образом навигационное поле, получит разные координаты по выбранным частотным диапазонам и СНС, соответствующие фазовым центрам соответствующих приемных антенн. При этом, в результате решения навигационной задачи, получится разная длина трассы от излучающей антенны до приемника сигналов СНС. Зная длину трассы и координаты излучающих антенн, решается задача позиционирования антенны приемника сигналов СНС по способу мультичастотного позиционирования в экранированном пространстве. Данный способ позволяет использовать обычные мультисистемые, многочастотные приемники сигналов СНС для позиционирования в экранированном пространстве, без изменения их структуры.
Приемник сигналов CMC обеспечивает определение координат и времени по каждому из принимаемых диапазонов частот, а также обеспечивает решение навигационной задачи по разности времени распространения сигнала от излучающих антенн, расположенных как минимум в трех различных точках экранированного пространства.
Антенны для приема и излучения сигналов ГНСС представляют собой широкополосную антенну с диапазоном рабочих частот от 1,1 ГГц до 1,67 ГГц.
Частотно-избирательный ретранслятор состоит из полосового фильтра, малошумящего усилителя и линии передачи, причем полосовые фильтры представляют собой фильтры с характеристиками: затухание в рабочей полосе частот не более 3 дБ, вне рабочей полосы частот - более 40 дБ, а малошумящие усилители представляют собой малошумящие усилители с усилением от 10 до 40 дБ (в зависимости от длины передающего тракта).
Приемник навигационный для приема сигналов СНС представляет собой любой мультичастотный спутниковый приемник сигналов СНС, например ПСНМ, разработанный в ЗАО «КБ НАВИС».
Экранированное пространство - пространство, в котором не доступны для приема сигналы СНС GPS, GLONASS, Galileo, Compass, GAGAN.
Линия передачи представляет собой ВЧ соединительный кабель.
Данное техническое решение может быть использовано в позиционных системах ориентации подвижных объектов различной физической природы внутри экранированного пространства с помощью обычного мультичастотного приемника сигналов СНС для позиционирования без изменения их структуры, например, в подземных переходах, станциях метро, внутри помещений, тоннелях, ущельях и др.
Изобретение относится к спутниковым навигационным системам (CНC) позиционирования. Технический результат состоит в повышении точности позиционирования в экранированном пространстве. Для этого одновременно выполняют прием сигналов позиционирования для диапазонов частот СНС: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS, причем каждый из используемых сигналов переизлучают отдельным частотно-избирательным ретранслятором, выделяющим с помощью полосового фильтра только используемую полосу частот, приемной и излучающей антенной; одновременно получают цифровую информацию из всех принятых сигналов позиционирования; одновременно вычисляют координаты и текущее время для каждого из принятых диапазонов частот СНС, причем полученные разные координаты соответствуют координатам приемных антенн, а время, полученное в процессе вычисления каждой координаты, равно сумме времени задержки в ретрансляторе и времени распространения сигнала от излучателя до приемника; сравнивают полученные координаты для каждого диапазона соответствующей СНС, расхождение координат соответствует тому, что мультичастотный приемник расположен в экранированном пространстве; решают задачу определения позиции антенны мультичастотного приемника. 2 н. и 5 з.п. ф-лы, 1 ил.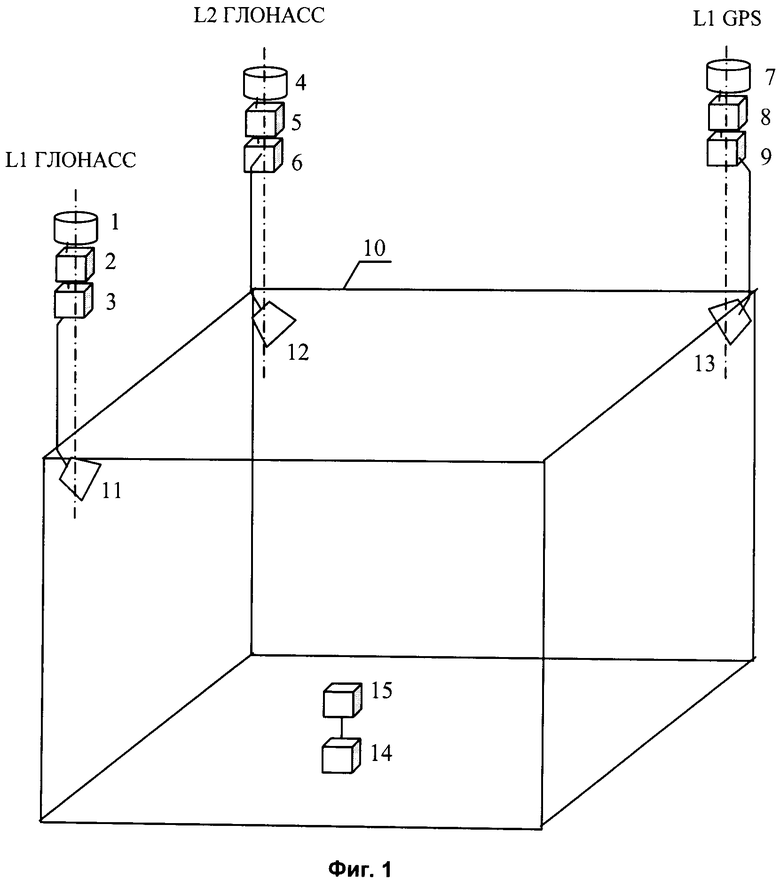
1. Способ мультичастотного позиционирования в экранированном пространстве включающий прием сигналов позиционирования навигационных космических аппаратов (НКА) GPS в виде псевдодальности и цифровой информации, получение данных из сигнала позиционирования в виде цифровой информации о положении каждого НКА, выполнение обработки навигационных сообщений, вычисление позиции (координат) и времени UTC (Всемирное координированное время) GPS навигационной аппаратуры потребителей (НАП), отличающийся тем, что одновременно выполняют прием сигналов позиционирования для диапазонов частот СНС: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS, при этом диапазон частот L1 GPS, например, заменяется на диапазон частот L1 Galileo, а диапазон частот L5 GPS на Е5а Galileo; причем каждый из используемых сигналов переизлучают отдельным частотно-избирательным ретранслятором, выделяющим с помощью полосового фильтра только используемую полосу частот, приемной и излучающей антенной; одновременно получают цифровую информацию из всех принятых сигналов позиционирования; одновременно вычисляют позицию в виде координат и текущее время UTC отдельно для каждого из принятых диапазонов частот СНС: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS, при этом диапазон частот L1 GPS, например, заменяется на диапазон частот L1 Galileo, диапазон частот L5 GPS на Е5а Galileo, причем полученные разные координаты соответствуют координатам приемных антенн, а время полученное в процессе вычисления каждой координаты равно сумме времени UTC, времени задержки в ретрансляторе и времени распространения сигнала от излучателя до приемника; причем для повышения точности позиционирования задержку распространения сигнала от приемной к передающей антенне выравнивают; сравнивают полученные координаты для каждого диапазона соответствующей СНС, причем совпадение координат соответствует тому, что мультичастотный приемник находится во внешнем реальном навигационном поле, а расхождение координат соответствует тому, что мультичастотный приемник расположен в экранированном пространстве; решают задачу определения позиции антенны мультичастотного приемника, причем для этого используют координаты излучающих антенн, которые соответствуют координатам, полученным для каждого диапазона частот соответствующей СНС, и разность времени распространения сигналов между излучающими антеннами.
2. Система мультичастотного позиционирования в экранированном пространстве, содержащая три приемных антенны GPS, предназначенные для приема GPS сигналов, исходящих, по меньшей мере, от трех GPS спутников, по меньшей мере, три радиочастотных (РЧ) GPS ретранслятора, предназначенные для усиления сигналов GPS, исходящих из направленных приемных GPS антенн, причем РЧ GPS ретранслятор состоит из полосового фильтра для снижения уровня шума, малошумящего усилителя для усиления сигнала GPS, линии передачи для передачи сигналов от приемных антенн GPS к излучающим антеннам GPS, по меньшей мере, три GPS излучающих антенны, предназначенные для передачи GPS сигналов, поступающих из РЧ GPS ретрансляторов в экранированное пространство, по меньшей мере, один GPS приемник, предназначенный для приема GPS сигналов, поступающих от излучающих GPS антенн, антенна GPS приемника, отличающаяся тем, что ретрансляторы выполнены частотно-избирательными, причем каждый из которых обеспечивает прием-передачу одного диапазона частот СНС: L1 GPS, или L1 ГЛОНАСС, или L2 GPS, или L2 ГЛОНАСС, или L3 ГЛОНАСС, или L5 GPS соответственно, излучающие антенны располагаются в разных местах экранированного помещения соосно с приемными антеннами, приемник сигналов СНС выполнен мультисистемным с возможностью приема сигналов СНС, по меньшей мере, в трех различных частотных диапазонах из следующего набора: L1 GPS, L1 ГЛОНАСС, L2 GPS, L2 ГЛОНАСС, L3 ГЛОНАСС, L5 GPS и обеспечивает определение координат и времени отдельно и одновременно по каждому из принимаемых диапазонов частот.
3. Система мультичастотного позиционирования в экранированном пространстве по п. 2, отличающаяся тем, что в частотно-избирательных ретрансляторах прием-передача диапазона частот L1 GPS, например, заменяется на L1 Galileo, a L5 GPS на Е5а Galileo.
4. Система мультичастотного позиционирования в экранированном пространстве по п. 2, отличающаяся тем, что в частотно-избирательных ретрансляторах системы полосы пропускания полосовых фильтров, выделяющие рабочий диапазон частот, не пересекаются по частоте.
5. Система мультичастотного позиционирования в экранированном пространстве по п. 2, характеризующаяся тем, что приемные антенны и излучающие антенны сигналов СНС имеют одинаковые координаты соответственно, причем время распространения сигнала от приемной до излучающей антенны одинаковое.
6. Система мультичастотного позиционирования в экранированном пространстве по п. 2, отличающаяся тем, что в приемнике сигналов СНС частотный диапазон L1 GPS, например, заменяется на частотный диапазон L1 Galileo, а частотный диапазон L5 GPS на частотный диапазон Е5а Galileo.
7. Система мультичастотного позиционирования в экранированном пространстве по п. 2, отличающаяся тем, что приемник сигналов СНС выполнен с возможностью решения навигационной задачи по разности времени распространения сигнала СНС от излучающих антенн, расположенных, по меньшей мере, в трех различных точках экранированного пространства.
| US5644318 A, 01.07.1997 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ КООРДИНАТ ОБЪЕКТА С ПРИВЯЗКОЙ К ПРОИЗВОЛЬНОЙ ТОЧКЕ ПРОСТРАНСТВА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2253128C1 |
| US5752218 A, 12.05.1998 | |||
| US5585800 A, 17.12.1996 | |||

