Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к области приемников спутниковой системы позиционирования (ССП, SPS), а более конкретно к снижению перекрестных помех в объединенных SPS-приемнике и системе связи.
Уровень техники
В последние годы существенно возросло использование персональных переносных устройств связи, таких как сотовые телефоны и пейджеры. Дополнительно возросло использование переносных навигационных устройств, таких как приемники спутниковой системы позиционирования (SPS), так как эти устройства стали более доступны. Последние технологические разработки обеспечили возможность объединения SPS-приемников и систем связи в единых блоках, например, объединения SPS-приемника и блока сотового телефона. Такие объединенные устройства имеют много приложений, например, персональная безопасность, аварийный отклик, слежение за транспортным средством и контроль за материально-производственными запасами. Некоторые объединенные блоки объединяют отдельные SPS-приемники и системы связи с использованием соответствующих электронных интерфейсов. Другие используют совместно используемые схемы и корпус. Указанные объединенные блоки отличаются преимуществами удобного использования, которые обеспечивают общие корпуса и единые интерфейсы пользователя. Однако такие объединенные блоки могут проявлять также некоторые недостатки, например, повышенный расход энергии и пониженную эффективность.
Одним отмеченным недостатком, свойственным многим объединенным устройствам SPS и связи, является пониженная эффективность секции SPS-приемника объединенного блока. Обычной причиной указанной пониженной эффективности являются помехи сигналов между каскадами связи и SPS-приемника. Например, в объединенном сотовом телефоне/SPS-приемнике передачи сотовой связи из каскада сотового телефона генерируют сильные помехи, которые могут понизить эффективность SPS-приемника.
Существующие подходы к преодолению перекрестных помех между каскадами SPS и связи включают в себя использование сложных фильтров или схем высокого динамического диапазона во входной секции SPS-приемника, для ограничения внутриполостной помехи до допустимых диапазонов. Однако указанные подходы требуют использования сложных дополнительных схем, которые могут повысить стоимость и расход энергии объединенных блоков. Например, один способ снижения перекрестных помех в объединенном сотовом телефоне/SPS-приемнике состоит в использовании отдельных полосовых фильтров в RF (РЧ) входном каскаде SPS-передатчика, для устранения радиочастотных (РЧ, RF) помех из передатчика сотовой связи. Однако в таком подходе имеются некоторые проблемы. Во-первых, для обеспечения адекватного уменьшения энергии сигнала, вводимой из передатчика сотовой связи в RF-схемы SPS-приемника, может потребоваться несколько фильтров. Это может повысить стоимость и увеличить размер объединенного блока. Во-вторых, использование фильтров повышает коэффициент шума SPS-приемника, делая его менее чувствительным к навигационным сигналам спутника.
Следовательно, требуется обеспечить систему, которая снижает перекрестные помехи между секциями связи и SPS объединенного приемника SPS/связного приемника.
Дополнительно требуется обеспечить систему, которая повышает эффективность приема SPS в объединенном приемнике SPS/связном приемнике без неблагоприятного влияния на стоимость и характеристики чувствительности SPS-приемника.
Раскрытие изобретения
Раскрыт способ работы мобильного устройства. Обнаруживается первое действие мобильного устройства. При обнаружении первого действия выполняются две следующие операции: (i) на период времени блокируется радиопередача данных через радиолинию передачи данных из блока связи мобильного устройства и (ii) из блока связи в приемник спутниковой системы позиционирования мобильного устройства передается первый сигнал управления, разрешающий обработку сигналов системы позиционирования сигнала, принимаемых приемником в продолжение указанного периода времени.
Первое действие может произойти, например, из-за операции, выполненной пользователем мобильного устройства, такой как нажатие кнопки на мобильном устройстве, или отсутствие речи, принимаемой микрофоном устройства связи.
Блокирование и разрешение радиопередачи может осуществляться поочередно.
Другие признаки настоящего изобретения станут ясны из последующего подробного описания и приложенных чертежей.
Краткое описание чертежей
Настоящее изобретение проиллюстрировано посредством возможных вариантов, а не наложения ограничений, согласно приложенным чертежам, в которых использована сквозная нумерация.
Фиг.1 - блочная диаграмма объединенных приемника глобальной системы позиционирования (ГСП, GPS) и системы связи с линией связи к базовой станции, согласно одному варианту осуществления настоящего изобретения.
Фиг.2 - блочная диаграмма компонентов, составляющих GPS-приемник и связной приемопередатчик в мобильном устройстве, согласно варианту осуществления настоящего изобретения.
Фиг.3 иллюстрирует мобильное устройство, используемое в сотовой сети телефонной связи, согласно одному варианту осуществления настоящего изобретения.
Фиг.4 - временная диаграмма, иллюстрирующая один способ работы мобильного устройства, согласно изобретению.
Фиг.5 - временная диаграмма, иллюстрирующая другой способ работы мобильного устройства, согласно изобретению.
Фиг.6 - блок-схема, иллюстрирующая операции снижения перекрестных помех в мобильном устройстве, согласно способу настоящего изобретения.
Осуществление изобретения
Описаны способ и устройство для снижения перекрестных помех в мобильном устройстве, которое объединяет приемник спутниковой системы позиционирования (ССМ, SPS) и устройство связи. В пояснительных целях в последующем описании изложены многочисленные конкретные подробности, чтобы обеспечить полное понимание настоящего изобретения. Однако для специалистов в данной области техники ясно, что настоящее изобретение может быть осуществлено без указанных конкретных подробностей. В других возможных вариантах, для облегчения пояснения, известные структуры и устройства изображены в виде блочной диаграммы.
В последующем описании варианты осуществления настоящего изобретения будут описаны в отношении применения в глобальной (спутниковой) системе позиционирования (ГСМ, GPS) Соединенных Штатов. Однако должно быть ясно, что эти способы в равной степени применимы к аналогичным спутниковым системам позиционирования, таким как российская система ГЛОНАСС. Следовательно, используемый здесь термин "GPS" включает в себя такие альтернативные спутниковые системы позиционирования, включая российскую систему ГЛОНАСС. Аналогично термин "GPS-сигналы" включает в себя сигналы из альтернативной спутниковой системы позиционирования.
Мобильное устройство
Фиг.1 - блочная диаграмма мобильного устройства 150, которое объединяет связной передатчик/приемник (приемопередатчик) с GPS-приемником для использования в одном варианте осуществления настоящего изобретения. Мобильным устройством 150 является переносной портативный блок, который включает в себя схемы для выполнения функций, необходимых для обработки сигналов GPS, а также функций, необходимых для обработки сигналов связи, передаваемых и принимаемых через линию связи. Линия связи, например линия 162 связи, обычно является линией радиочастотной связи к другому компоненту связи, такому как базовая станция 160, имеющая связную антенну 164.
Мобильное устройство 150 содержит GPS-приемник 130, в который входит схема захвата (сигнала) и секция обработки. В соответствии с обычными способами GPS, GPS-приемник 130 принимает GPS-сигналы, передаваемые из орбитальных GPS-спутников, и определяет времена поступления (так называемые "псевдодальности") уникальных псевдошумовых кодов (ПШ, PN), сравнивая сдвиги во времени между принимаемыми последовательностями PN-кодовых сигналов и внутренне сгенерированными последовательностями PN-сигналов. GPS-сигналы принимаются посредством GPS-антенны 111 и поступают на вход схемы захвата, которая захватывает PN-коды для различных принимаемых спутников. Навигационные данные (например, псевдодальности), производимые схемой захвата, обрабатываются процессором для передачи связным приемопередатчиком 109.
Мобильное устройство 150 также содержит секцию 109 связного приемопередатчика. Связной приемопередатчик 109 соединен со связной антенной 100. Связной приемопередатчик 109 посредством сигналов связи (обычно RF) передает навигационные данные, обработанные GPS-приемником 130, в удаленную базовую станцию, например базовую станцию 160. Навигационными данными могут быть фактическая широта, долгота и высота GPS-приемника, или это могут быть необработанные или частично обработанные данные. Принятые сигналы связи подаются на вход связного приемопередатчика 109 и передаются на процессор для обработки и возможного вывода через громкоговоритель.
Согласно одному варианту осуществления настоящего изобретения в мобильном устройстве 150 данные псевдодальности, сгенерированные GPS-приемником 130, передаются через линию 162 связи в базовую станцию 160. Затем базовая станция 160 определяет местоположение объединенного приемника 150 на основе данных псевдодальности из объединенного приемника, времени, в которое измерена псевдодальность, и данных эфемерид, принятых из ее собственного GPS-приемника или других источников таких данных. Затем данные местоположения могут быть переданы обратно в мобильное устройство 150 или в другие удаленные местоположения. Линия 162 связи между мобильным устройством 150 и базовой станцией 160 может быть реализована в нескольких различных вариантах осуществления, включающих в себя линию телефонной сотовой связи или прямую линию связи. В одном варианте осуществления настоящего изобретения секция 109 связного приемопередатчика реализована в виде сотового телефона.
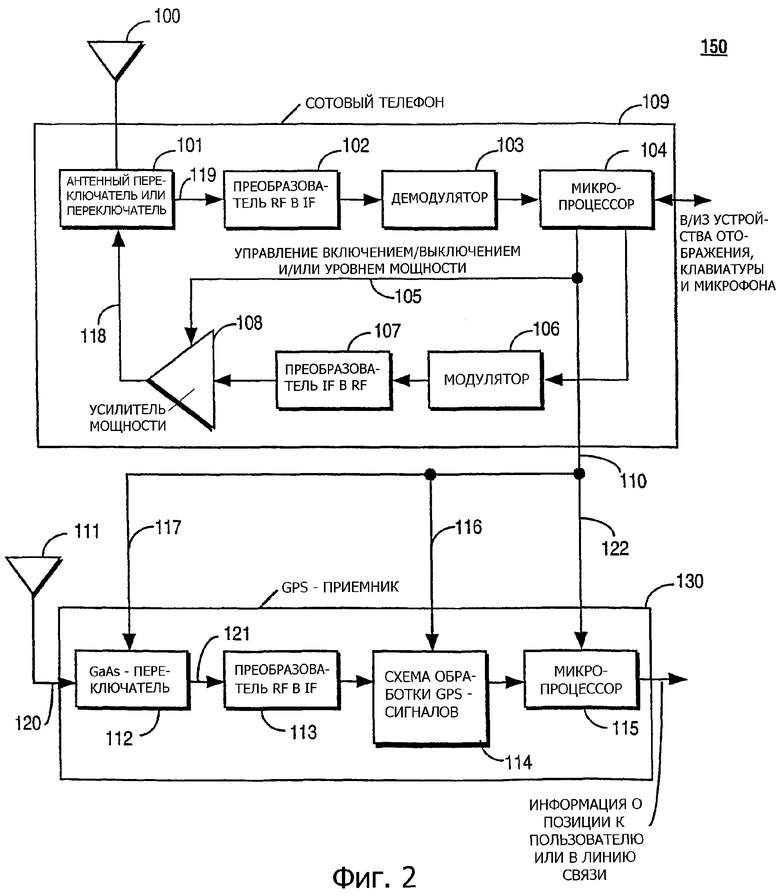
Фиг.2 обеспечивает более подробную блочную диаграмму объединенных сотового телефона и GPS-приемника согласно одному варианту осуществления настоящего изобретения. Для специалистов в данной области техники очевидно, что система, иллюстрируемая фиг.2, является одним вариантом осуществления, и, согласно принципам настоящего изобретения, возможны различные изменения в конструкции и структуре объединенного GPS-приемника. Например, хотя в последующем описании предполагается, что секция связи реализована сотовым телефоном, ясно, что настоящее изобретение может быть реализовано другими устройствами связи, такими как двусторонние пейджеры, и подобные двусторонно направленные коммуникаторы.
На фиг.2, мобильное устройство 150 содержит GPS-приемник 130 и GPS-антенну 111 (совместно определенные как "GPS-секция") и сотовый телефон 109 и антенну 100 сотового телефона (совместно определенные как "секция связи"). Сотовый телефон передает в удаленную базовую станцию (например, базовую станцию 160 на фиг.1) и принимает из нее сигналы через антенну 100.
GPS-секция
В GPS-приемнике 130 мобильного устройства 150 принятый GPS-сигнал подается из GPS-антенны 111 через линию 120 передачи сигналов и переключатель 112 на вход преобразователя 113 радиочастоты (RF) в промежуточную частоту (IF). Преобразователь 113 частоты преобразовывает сигнал к соответствующей промежуточной частоте, например, 70 МГц. Затем он обеспечивает дополнительное преобразование к более низкой промежуточной частоте, например, 1 МГц. Выходные данные преобразователя 113 RF в IF подсоединяются на вход схемы 114 обработки GPS-сигналов. Схема 114 обработки GPS-сигналов включает в себя аналого-цифровой (A/D) преобразователь, который оцифровывает выходные сигналы из преобразователя 113 RF в IF.
В одном варианте осуществления настоящего изобретения схема 114 обработки GPS-сигналов также включает в себя цифровую память кадра, которая соединена с выходом аналого-цифрового преобразователя и может хранить запись данных, которые должны быть обработаны. Память кадра используется для обработки GPS-сигналов, которые обычно хранятся в отдельном запоминающем устройстве, соединенном со схемой 114 обработки GPS. Память кадра может быть использована также для пакетированных сигналов связи, то есть сигналов, состоящих из пакетов битов данных, за которыми следуют длительные периоды бездействия. Непрерывная сигнализация, такая как многие сигналы сотового типа, также может обрабатываться схемой обработки непрерывно.
Выходные данные из схемы 114 обработки GPS-сигналов поступают на микропроцессор 115. Микропроцессор 115 осуществляет дополнительную обработку сигналов спутников, принимаемых в GPS-приемнике 130, и выводит обработанные сигналы для передачи непосредственно в интерфейс пользователя или через линию связи в удаленный приемник (не изображен).
В одном варианте осуществления настоящего изобретения GPS-приемником 130 является стандартный GPS-приемник, который для демодулирования GPS-сигналов использует совокупность корреляторов. В способе настоящего изобретения GPS-приемник активизируется или дезактивизируется отпирающим импульсом. Когда стандартный GPS-приемник активизирован, он может выполнять все свои нормальные функции, в которые входит демодуляция 50 бодов информационного сообщения спутника. Однако если периоды пропускания сигналов становятся большей частью периода бода данных, то демодуляция может быть затруднена или невозможна. В этом случае может быть использован альтернативный вид GPS-приемника. Например, один вид GPS-приемника только обнаруживает относительные времена поступления нескольких одновременно принятых GPS-сигналов и передает указанные относительные времена поступления (так называемые "псевдодальности") в удаленное местоположение (см., например, F.H.Raab, et al., "An Application of the Global Positioning System to Search and Rescue and Remote Tracking", Journal of the Institute of Navigation, Vol.24, No.3, Fall 1977, pp.216-227). Затем определяется позиция мобильного устройства посредством объединения указанных данных псевдодальности с GPS-информацией со спутника, которую оно накапливает, используя собственные приемники или через некоторый другой источник таких данных. Указанная конфигурация особенно полезна в различных приложениях аварийного отклика и слежения.
Хотя варианты осуществления настоящей заявки описаны в отношении конкретной конфигурации GPS-приемника, для специалистов в данной области техники очевидно, что существует несколько различных конфигураций GPS-приемника, которые могут пользоваться преимуществом способов снижения перекрестных помех настоящего изобретения.
Кроме того, хотя варианты осуществления настоящего изобретения описаны в отношении GPS-спутников, ясно, что принципы в равной степени применимы для систем позиционирования, которые используют псевдолиты (псевдоспутники) или комбинацию спутников и псевдолитов. Псевдолиты - наземные передатчики, которые широковещают PN-код (подобный GPS-сигналу), модулированный на несущей L-полосы частот (или другой частоты), в основном синхронизированный с временем GPS. Каждому передатчику может быть назначен уникальный PN-код, чтобы обеспечить возможность идентификации удаленным приемником. Псевдолиты полезны в ситуациях, где GPS-сигналы из орбитального спутника могут быть недоступны, например, в туннелях, шахтах, зданиях или других закрытых областях. Подразумевается, что используемый здесь термин "спутник" включает в себя псевдолиты или эквиваленты псевдолитов, а используемый здесь термин GPS-сигналы включает в себя GPS-подобные сигналы из псевдолитов или эквивалентов псевдолитов.
Секция связи
Секция связи мобильного устройства 150 содержит каскад приемника и каскад передатчика, соединенные со связной антенной 100 через антенный переключатель или переключатель 101 приемопередачи. При приеме сигнала связи, такого как сигнал сотового телефона, из базовой станции связи (например, базовой станции 160) переключатель 101 направляет входной сигнал на преобразователь 102 RF в IF. Преобразователь 102 частоты RF в IF осуществляет преобразование сигнала связи к соответствующей промежуточной частоте для дальнейшей обработки. Выходные данные преобразователя 102 RF в IF подсоединяются на демодулятор 103, который демодулирует сигнал связи для определения команд в сигнале связи или других данных в сигнале связи (например, оцифрованного речевого сигнала, доплеровских данных или данных, представляющих эфемериды видимых спутников). Демодулятор 103 может быть реализован в виде цифрового демодулятора. В этом случае, до подачи на вход демодулятора 103, сигнал связи, преобразованный по частоте, может быть пропущен через аналого-цифровой (A/D) преобразователь, который оцифровывает выходные сигналы из преобразователя 102 RF в IF.
В одном варианте осуществления настоящего изобретения выходные данные из демодулятора 103 передаются в микропроцессор 104. Микропроцессор 104 выполняет любую обработку, необходимую для функций приема и передачи связи.
Микропроцессор 104 также соединен с дисплеем и микрофоном. Микрофон выполнен с возможностью преобразования речи в речевую информацию и подает речевую информацию на микропроцессор 104. Когда требуется передача через линию связи, микропроцессор 104 генерирует данные для передачи и цифровые выборки основной полосы частот сигнала (или его представление, такое как математическая модель сигнала). Затем он использует эти данные для модулирования несущего сигнала с использованием модулятора 106. Хотя также может быть использована аналоговая модуляция (такая как частотная модуляция), в последних системах модуляция, в основном, имеет цифровой вид, такой как частотная манипуляция или фазовая манипуляция. В этом случае после модуляции цифровой сигнал преобразовывается в D/A преобразователе из цифрового в аналоговый. Несущая частота, на которой в модуляторе 106 выполняется модуляция, может быть или может не быть конечной RF частотой сигнала связи; если она является промежуточной частотой (IF), то для преобразования сигнала к конечной RF частоте сигнала связи используется дополнительный преобразователь 107 IF в RF. Усилитель 108 мощности повышает уровень сигнала сигнала связи, и затем этот усиленный сигнал через переключатель 101 передается в связную антенну 100.
В способе настоящего изобретения сигнал связи, содержащий данные, представляющие информацию о позиции (например, псевдодальности до различных спутников или широту и долготу мобильного устройства 150), передается через линию связи 162 в базовую станцию 160. Базовая станция 160 может служить в качестве узла обработки для вычисления информации о позиции переносного GPS-блока, или она может служить в качестве узла ретрансляции и ретранслировать информацию, принятую из мобильного устройства 150.
В некоторых сотовых системах телефонной связи, таких как системы множественного доступа с временным разделением каналов (МДВР, TDMA) (включая, например, глобальную систему мобильной связи (ГСМ, GSM)), времена передачи и приема сигналов сотовой связи разделены. В таких случаях для изолирования передаваемого усиленного сигнала 118, обеспечиваемого усилителем 108 мощности, от тракта 119, соединенного с чувствительными входными приемными схемами (преобразователь 102 частоты), может использоваться простой переключатель 101. В частности, приемные схемы 102 могут содержать малошумящий усилитель (МШУ, LNA), который может быть разрушен или подвергнуться иному неблагоприятному воздействию, если сигнал из усилителя мощности будет передан в LNA без существенного ослабления.
В других сотовых системах, таких как Североамериканская система IS-95, основанных на множественном доступе с кодовым разделением каналов (МДКР, CDMA), прием и передача сигналов через антенну 100 могут осуществляться одновременно. Для изолирования RF-схем из 102 от сигнала большой мощности из 118 вместо переключателя 101 используется устройство, называемое "антенным переключателем". Антенный переключатель 101 состоит из двух RF-фильтров, один настроен на полосу частот передачи, а другой на полосу частот приема. Выходные данные 118 усилителя мощности проходят через фильтр передачи и затем на антенну 100, в то время как принимаемый сигнал из антенны проходит через фильтр приема. Следовательно, передачи изолированы от RF-схем 102 на величину, равную изоляции, обеспечиваемой фильтром приема на частоте передачи.
Пропускание сигналов приемопередатчика связи
В одном варианте осуществления настоящего изобретения мобильное устройство 150 содержит схемы управления, которые снижают перекрестные помехи между каскадами GPS-приемника и приемопередатчика сотовой связи. В объединенных приемниках перекрестные помехи часто являются особо острой проблемой, так как принимаемые в GPS-приемнике сигналы со спутника обычно очень слабы. Обычно перекрестные помехи возникают из-за высокой степени взаимодействия между передаваемым через антенну 100 сигналом сотового телефона и принимающей GPS-антенной 111. Это верно, в особенности, для случая, где блоки 100 и 111 антенн, для экономии физического пространства или уменьшения стоимости, размещены совместно или совместно используют части их механической конструкции.
В одном варианте осуществления настоящего изобретения снижение перекрестных помех между секциями связи и GPS объединенного блока осуществляется посредством уменьшения мощности передатчика секции связи (обычно сотового телефона). Мощность передатчика уменьшается на период времени, в течение которого могут обрабатываться сигналы спутниковой системы позиционирования, после чего мощность передатчика опять увеличивается. Управление мощностью и работа GPS-приемника синхронизируются посредством отпирающего импульса. Действие отпирающего импульса, согласно одному варианту осуществления настоящего изобретения, описано в отношении объединенного приемника, изображенного на фиг.2.
В секции 109 сотового телефона мобильного устройства 150 из микропроцессора 104 в усилитель 108 мощности передается сигнал 105 управления уровнем мощности. В одном варианте осуществления настоящего изобретения первое состояние сигнала управления уровнем мощности уменьшает мощность в усилителе мощности, а второе состояние сигнала восстанавливает нормальные уровни мощности в усилителе мощности. В виде варианта, внутри сигнала управления уровнем мощности воплощены два сигнала. Первый сигнал уменьшает мощность в усилителе мощности, а второй сигнал восстанавливает нормальные уровни мощности в усилителе мощности. В зависимости от уровня мощности усилителя 108 и требуемого снижения перекрестных помех сигнал 105 управления уровнем мощности может выключить усилитель 108 мощности полностью или уменьшить мощность усиления на предварительно определенную величину.
Сигнал 105 управления уровнем мощности также передается в GPS-приемник 130. Этот сигнал программируется для активизации GPS-приемника для приема и обработки GPS-сигналов в зависимости от уровня мощности усилителя 108 мощности связи. Когда сигнал 105 управления уровнем мощности уменьшает или снижает мощность усилителя 108 мощности, GPS-приемник 130 активизируется для приема GPS-сигналов. Обратно, когда сигнал управления уровнем мощности поддерживает нормальные уровни мощности в усилителе 108 мощности, предотвращается прием GPS-приемником 130 GPS-сигналов. В виде варианта, GPS-приемник 130 может программироваться для приема GPS-сигналов, но игнорирования таких сигналов в схемах обработки, когда сигнал управления уровнем мощности указывает, что передатчик сотового телефона имеет большую мощность.
В GPS-приемнике 130 отпирающий импульс 110 соответствует сигналу 105 управления уровнем мощности. В одном варианте осуществления настоящего изобретения, отпирающий импульс 110 передается в микропроцессор 115 через линию 122, в схему 114 обработки GPS через линию 116 и в переключать 112 через линию 117. В одном варианте осуществления переключатель 112 управляется отпирающим импульсом 110 и сигналом 105 управления уровнем мощности. Когда сигнал 105 управления уровнем мощности уменьшает мощность усилителя 108 мощности сотового телефона, переключатель 112 включается для обеспечения возможности прохождения данных из GPS-антенны 111 в схемы GPS-приемника. Обратно, когда сигнал 105 управления уровнем мощности поддерживает большую мощность усилителя 108 мощности, переключатель 112 выключается, чтобы данные не проходили через GPS-приемник. Следовательно, при передачах сотового телефона на большой мощности пропускание GPS-сигналов отсутствует (или блокируются), тогда как в любое другое время может осуществляться их прием.
В одном варианте осуществления настоящего изобретения переключателем 112 является переключатель на арсениде галлия (GaAs). Так как переключатель 112 находится во входном тракте GPS-сигнала, он вызывает некоторое ослабление входного GPS-сигнала. Использование GaAs-переключателя минимизирует указанное ослабление. Кроме того, устройства токового ключа на GPS-частоте (1575.42 МГц) обеспечивают вносимое ослабление около 0.5 dB.
В альтернативном варианте осуществления настоящего изобретения отпирающий импульс 110 может подаваться только на вход микропроцессора 115 вместо переключателя 117. В такой конфигурации микропроцессор 115 непосредственно управляет переключателем 117 или схемой 114 обработки GPS-сигналов для пропускания входящих GPS-сигналов при передаче сотового телефона 109.
В дополнительном альтернативном варианте осуществления настоящего изобретения, GPS-приемник 130 может не содержать GaAs-переключателя 112. Указанный переключатель может быть опущен, если входные RF-схемы GPS-приемника 113 могут выдерживать большую мощность из передатчика сотового телефона (например, с некоторого вида ограничивающими схемами). Исключение переключателя 112 устраняет любое потенциальное ослабление сигнала посредством переключателя. В этом альтернативном варианте осуществления импульс 110 отпирания подается на вход схемы 114 обработки GPS-сигналов или микропроцессора 115 или на вход обоих устройств. Указанный сигнал вызывает игнорирование схемами обработки входных GPS-сигналов в продолжение периодов передачи сотовым телефоном, даже если указанные сигналы принимаются GPS-приемником 130.
Наиболее современные системы цифровых сотовых телефонов обладают возможностью осуществлять передачу на полной мощности только часть времени. Соответственно, описанный здесь способ отпирающего импульса применим ко многим различным цифровым сотовым телефонам. Если передачи сотовой связи в этих телефонах происходят с рабочим циклом 1/8 (как в случае цифровой сотовой GSM или CDMA в режиме пониженной пропускной способности данных), то потери в чувствительности GPS-приемника из-за такого пропускания (сигнала) составляют только около 0.5 dB.
Фиг.4 иллюстрирует один возможный вариант возможной работы мобильного устройства. Фиг.4 является временной диаграммой с моментами времени T1, T2, T3 и т.д. по оси абсцисс и действиями, такими как "разговор", "передача речевой информации" и "обработка GPS-данных" по оси ординат.
Начиная с момента времени T1, человек может говорить в микрофон до достижения момента времени T2. В продолжение этого времени из мобильного устройства непрерывно передается речевая информация.
Затем может иметь место перерыв в речи с момента времени T2 до момента времени T3, после которого вновь продолжается речь. Так как перерыв с T2 до T3 меньше предварительно определенного минимума, например, в полсекунды, передача речевой информации не прерывается.
Затем вновь, в момент времени T4, может иметь место перерыв (то есть пауза) в речи. Перерыв в речи может длиться до момента времени T7. Так как перерыв или пауза в речи больше минимального перерыва в полсекунды, в момент времени T5, после минимального перерыва, передача речевой информации блокируется. В момент времени T5 передается сигнал управления, который разрешает обработку GPS-данных. Обработка GPS-данных продолжается до момента времени T6. Разрыв между моментом времени T6 и моментом времени T5 достаточно большой, чтобы разрешить обработку требуемого минимального количества GPS-данных, обычно от одной до двух секунд. Минимальное количество GPS-данных является достаточным для триангулирования позиции мобильного устройства.
В момент времени T7 вновь продолжается речь, которая может продолжаться до момента времени T8, после чего имеет место перерыв в речи с момента времени T8 до момента времени T10. Минимальный перерыв в речи в полсекунды достигается в момент времени T9, в который блокируется передача речевой информации. В момент времени T9 разрешается обработка GPS-данных. В момент времени T10 пользователь может вновь говорить в микрофон и продолжать говорить до момента времени T12. Однако передача речевой информации является деактивированной до момента времени T11. Разрыв между моментом времени T11 и моментом времени T9 составляет, например, около двух секунд и является достаточно большим, чтобы обработать достаточное количество GPS-данных. В момент времени T9 передается сигнал, который разрешает обработку GPS-данных, и в момент времени T11 передается другой сигнал, который блокирует прием и обработку GPS. В момент времени T11 вновь разрешается передача речевой информации. В этом возможном варианте блок речевой информации говорящего (между T10 и T11) отсекается из-за требования на завершение обработки GPS. В других вариантах осуществления действие возобновленной речи могло привести к завершению периода обработки GPS, вследствие чего обеспечивается возможность непрерывной речи. Однако это может привести к неуспешному завершению обработки GPS.
Следует отметить, что не требуется, чтобы промежутки времени, используемые для обработки GPS-данных, были равными. Например, в вышеупомянутом возможном варианте не требуется, чтобы промежутки времени T5-T6 и T9-T11 были равными. Это может иметь место, так как информация, полученная из обработки предыдущего промежутка времени (например, T5-T6), может способствовать сокращению времени обработки, требуемого для последующей обработки GPS-сигналов (например, T9-T11). Например, предыдущая обработка GPS определяет времена поступления различных GPS-сигналов. Указанные времена поступления могут быть спроецированы вперед во времени для оценки времен поступления таких сигналов в более поздний момент времени. Такие оценки сокращают обработку, требуемую для определения точных времен поступления GPS-сигналов, что требуется для точной геолокации. Также следует отметить, что периоды времени, в продолжение которых выполняется обработка GPS (T5-T6 и T9-T11 в возможном варианте, рассмотренном выше), могут быть определены предварительно или могут быть, по существу, настраиваемыми. Согласно простой процедуре должны использоваться периоды, обеспечивающие успешную обработку GPS, которые фиксированы и определены предварительно. Более сложной процедурой будет процедура, согласно которой промежуток времени обработки GPS будет настраиваемым в зависимости от разнообразных условий. Однажды завершившись, передача речи может быть возобновлена. Условия, управляющие длительностью промежутка времени, должны включать в себя интенсивность принимаемого сигнала принимаемых SPS-сигналов и априорную информацию относительно параметров таких сигналов, например, область неопределенности доплеровских частот и времена поступления таких сигналов. Как указано выше, предыдущие операции обработки SPS-сигнала могут приводить к сокращению длительностей промежутков времени, требуемых для последующей обработки. В виде варианта, как описано ранее, длительность промежутка времени может определять неактивность речи.
В продолжение периодов, когда передача речевой информации блокирована, секция связи мобильного устройства может входить в полудуплексный режим. Следовательно, она может принимать речевую информацию и, имея акустический динамик, который является частью мобильного устройства, создавать звуковой сигнал. Следовательно, как изображено на фиг.4, она может принимать речевую информацию в продолжение промежутка времени, начинающегося в T5 и заканчивающегося в T6, когда передача речевой информации блокирована. В других вариантах осуществления в продолжение указанного промежутка времени должны быть предотвращены и передача и прием речевой информации.
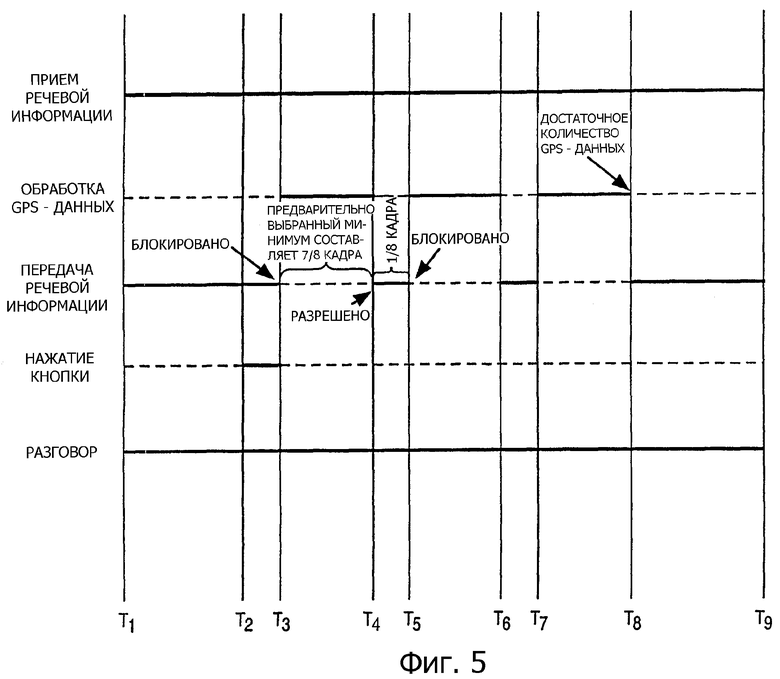
Фиг.5 иллюстрирует другой способ, согласно которому может работать мобильное устройство. Предполагается, что человек говорит в микрофон непрерывно с момента времени T1 до момента времени T9. Передача речевой информации инициируется в момент времени T1 и продолжается вплоть до момента времени T2.
В момент времени T2 человек нажимает кнопку, или, в другом варианте осуществления, человек может произвести некоторое другое действие на мобильном устройстве. Кнопка является нажатой с момента времени T2 и отпускается в момент времени T3. В момент времени T3, при отпускании кнопки, передача речевой информации блокируется. Передается сигнал управления, который разрешает обработку GPS-данных.
Затем передача речевой информации поочередно блокируется и разрешается, чередуясь в зависимости от времени. Речевая информация блокируется на 7/8 кадра и затем разрешается на 1/8 кадра. Каждый раз при блокировке передачи речевой информации передается сигнал управления, который разрешает обработку GPS-данных, и каждый раз при разрешении передачи речевой информации передается сигнал управления, который блокирует обработку GPS-данных. В данном возможном варианте передача речевой информации блокируется в моменты времени T3, T5 и T7 и разрешается в моменты времени T4, T6 и T8. GPS-данные обрабатываются с момента времени T3 до момента времени T4, с момента времени T5 до момента времени T6 и с момента времени T7 до момента времени T8. Количество GPS-данных, накопленных и обработанных от отпускания кнопки в момент времени T3 до момента времени T8, является достаточным для триангулирования позиции мобильного устройства. После момента времени T8 передача речевой информации не блокируется вновь, за исключением случая, если вновь нажимается кнопка. Посредством этого пользователь мобильного устройства может по желанию вызвать начало и далее окончание обработки GPS.
Мобильное устройство может входить в полудуплексный режим также каждый раз при блокировке передачи речевой информации, чтобы могла быть принята и обработана речевая информация и мог быть сгенерирован звуковой сигнал. Звуковой сигнал обычно передается на динамик в мобильном устройстве, который генерирует слышимый звук.
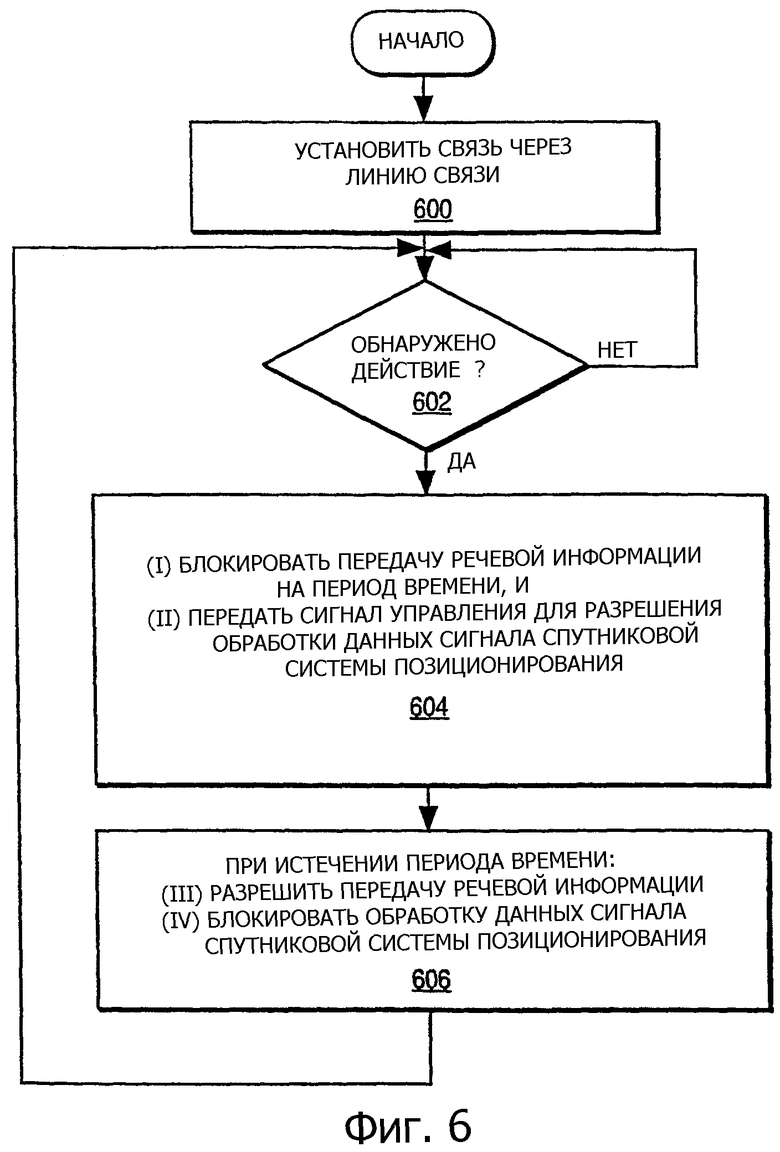
Фиг.6 иллюстрирует основные действия согласно изобретению. На этапе 600 устанавливается связь через линию связи. На этапе 602 определяется, обнаружено ли действие. Действием может быть, например, отсутствие речи, обнаруженное микрофоном мобильного устройства, как описано согласно фиг.4, или нажатие кнопки, например, описанное согласно фиг.5. Возможны также другие действия.
Если на этапе 602 обнаружено действие, то выполняется этап 604. На этапе 604 (i) на период времени блокируется передача речевой информации и (ii) передается сигнал управления для разрешения обработки данных сигнала спутниковой системы позиционирования. На фиг.4 этап 604 происходит в моменты времени T5 и T9, а на фиг.5 этап 604 происходит в момент времени T3. Когда истекает указанный период времени, выполняется этап 606. На этапе 606 (iii) разрешается передача речевой информации и (iv) блокируется обработка данных сигнала спутниковой системы позиционирования. На фиг.4 этап 606 происходит в моменты времени T6 и T11, а на фиг.5 этап 606 происходит в момент времени T4. Как указано ранее, период времени 604 может быть предварительно определенным или настраиваемым в зависимости от применяемой стратегии обработки.
В мобильном устройстве 150 фиг.2 схемы внутри GPS-секции и секции связи иллюстрируются как выделенные и разделенные между двумя секциями. Однако следует отметить, что варианты осуществления настоящего изобретения могут использоваться в мобильных устройствах, в которых один или большее количество элементов используется двумя секциями совместно. Например, функции микропроцессора 104 и 115 могут быть объединены в едином процессоре или программируемой цифровой схеме, которые могут использоваться секциями GPS и связи совместно. Аналогично двумя секциями может совместно использоваться один или большее количество преобразователей частоты, переключателей или антенных блоков.
В приведенном выше описании был описан сигнал управления, который передается GPS-приемнику и/или обрабатывающим элементам для активизации или деактивизации работы GPS. Сигнал управления был показан проходящим по отдельному тракту 110, 117 и 116. Должно быть ясно, что в некоторых реализациях GPS схемы обработки GPS-сигналов и схемы обработки сотового телефона могут быть помещены внутри одной интегральной схемы. В этом случае отпирающий сигнал управления может быть полностью представлен внутри той же интегральной схемы и не наблюдаться в виде внешней физической линии связи. Кроме того, такие сигналы управления могут передаваться через общую шину микропроцессора, которая совместно используется несколькими элементами схемы, такими как блоки памяти, клавиатуры и т.д. Настоящее изобретение должно интерпретироваться как включающее в себя указанные виды сигнала управления. Дополнительно, как только что пояснено, сотовый телефон или другое устройство связи может быть не отделено полностью от SPS-приемника, так как вновь они могут совместно использовать общие схемы, например, входные RF-компоненты, микропроцессоры и т.д. Однако функция связи и функция SPS должны иметь некоторые отдельные блоки аппаратных элементов и/или программного обеспечения. Следовательно, когда осуществляется ссылка на "блок связи" и на "SPS-приемник", отсутствует ограничение, означающее их полную или даже преимущественную отделенность.
Сеть GPS/сотовая сеть телефонной связи
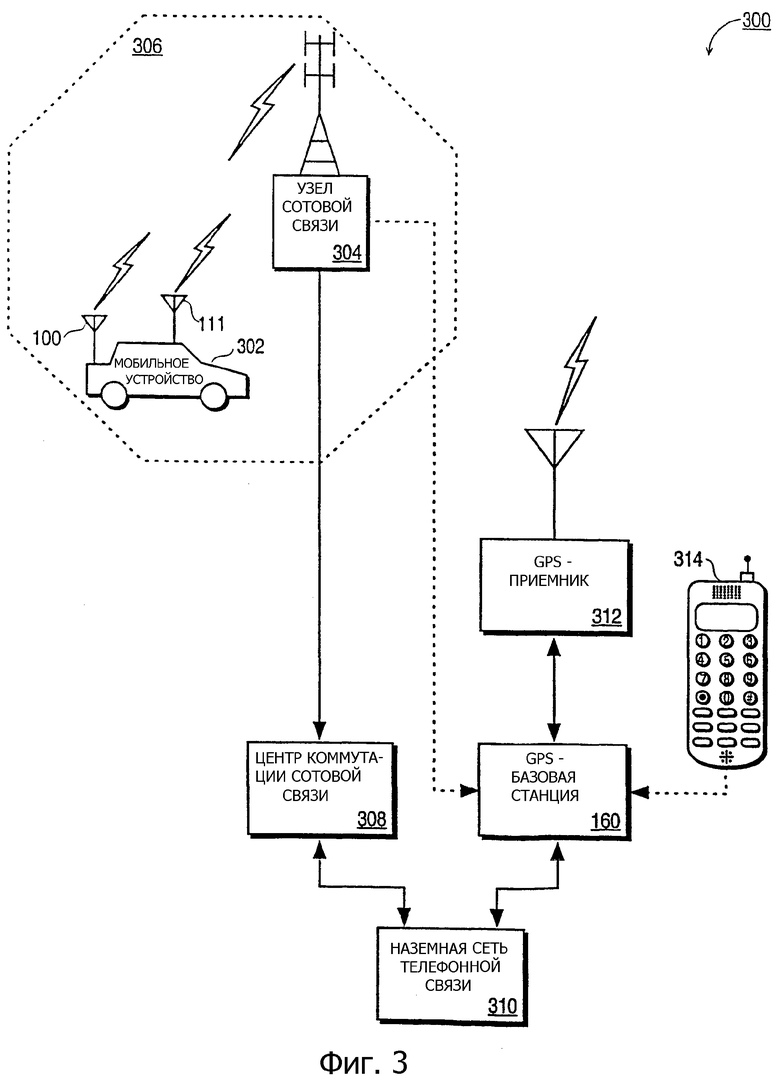
Как описано выше, один вариант осуществления настоящего изобретения используется в мобильном устройстве, в котором связным приемопередатчиком является сотовый телефон, используемый в сотовой сети связи. Фиг.3 иллюстрирует использование мобильного устройства 150, в контексте сотовой сети телефонной связи, для формирования объединенной системы 300 GPS и сотовой связи. Область 306 представляет ячейку сотовой телефонной связи, которая обслуживается узлом 304 сотовой связи. Узел 304 сотовой связи передает в сотовые телефоны и приемники, например, мобильное устройство 302 и принимает из них сигналы сотовой телефонной связи внутри ячейки 306. Мобильное устройство 302 содержит мобильное устройство, такое как мобильное устройство 150 на фиг.1. Мобильное устройство 302 передает сигналы сотовой связи в узел 304 сотовой связи через связную антенну 100 и принимает GPS-сигналы из GPS-спутников через GPS-антенну 111. Узел 304 сотовой связи передает передачи сотовой связи из мобильных устройств внутри ячейки 306 в наземную сеть 310 телефонной связи через центр 308 коммутации сотовой связи. Центр 308 коммутации сотовой связи передает к соответствующему адресату сигналы связи, принятые из мобильного устройства 302. Центр 308 коммутации сотовой связи, дополнительно к ячейке 306, может обслуживать несколько других ячеек. Если адресатом сигнала, переданного мобильным устройством 302, является другое мобильное устройство, то создается соединение с узлом сотовой связи, охватывающим зону, в которой расположено вызванное мобильное устройство. Если адресат является наземным, то центр 308 коммутации сотовой связи соединяется с наземной сетью 310 телефонной связи.
Следует отметить, что система связи, основанная на сотовой связи, является системой связи, имеющей более одного передатчика, каждый из которых обслуживает отличную географическую зону, которая в любой момент времени является предварительно определенной. Обычно каждый передатчик является радиопередатчиком, обслуживающим ячейку, имеющую географический радиус менее 20 миль, однако охватываемая зона зависит от конкретной сотовой системы связи. Существуют многочисленные виды сотовых систем связи, такие как сотовые телефоны, PCS (персональная система связи), SMR (специализированная радиостанция для связи с подвижными объектами), односторонние и двусторонние системы пейджеров, RAM, ARDIS и системы радиосвязи для передачи пакетированных данных. Обычно различные предварительно определенные географические зоны определяются, как ячейки, и несколько ячеек группируются совместно в зону обслуживания сотовой связи, и указанные несколько ячеек соединяются с одним или большим количеством центров коммутации сотовой связи, которые обеспечивают соединения с наземными системами и/или сетями телефонной связи. Зоны обслуживания часто используются для расчетов (биллинга). Следовательно, может иметь место соединение ячеек более чем в одной зоне обслуживания, с одним центром коммутации. В виде варианта, иногда имеет место соединение ячеек внутри одной зоны обслуживания с различными центрами коммутации, особенно в зонах плотной заселенности. В основном, зона обслуживания определяется как совокупность ячеек, расположенных близко географически по отношению друг к другу. Другой класс сотовых систем связи, соответствующий приведенному выше описанию, основан на спутниках, причем базовыми станциями сотовой связи являются спутники, которые обычно находятся на орбите Земли. В этих системах сектора ячейки и зоны обслуживания смещаются как функции от времени. Возможные варианты таких систем включают в себя системы Iridium, Globalstar, Orbcomm и Odyssey.
В системе, иллюстрируемой на фиг.3, GPS-информация позиционирования, передаваемая мобильным устройством 302, передается в обслуживающую GPS-базовую станцию через наземную сеть 310 телефонной связи. GPS-базовая станция 160 служит в качестве узла обработки для вычисления позиции GPS-приемника в удаленном устройстве 302. GPS-базовая станция 160 также может принимать GPS-информацию из сигналов со спутника, принимаемых в GPS-приемнике 312 (например, для обеспечения дифференциальных коррекций к GPS-информации мобильного устройства). GPS-базовая станция 160 может быть связана непосредственно с узлом 304 сотовой связи через наземную линию связи или радиолинию для приема соответствующих сигналов сотовой связи. В виде варианта, GPS-базовая станция 160 может принимать соответствующие сигналы сотовой связи из сотового телефона 314, который передает сигналы в приемник сотовой связи в GPS-базовой станции 160.
Следует отметить, что система 300 сотовой сети связи на фиг.3 представляет один вариант осуществления использования настоящего изобретения, и для передачи GPS-сигналов из мобильного устройства в GPS-базовую станцию могут использоваться другие системы связи, отличные от сотовой сети телефонной связи.
Сотовые системы связи
Варианты осуществления настоящего изобретения могут использоваться в нескольких различных сотовых системах телефонной связи. Конкретная сотовая система связи или стандарт зависят от региона, в котором развернута система, так как стандарты сотовой связи отличаются в различных странах и регионах.
В одном варианте осуществления настоящего изобретения объединенное мобильное устройство 150 используется в сотовой системе связи GSM. GSM является Пан-европейской цифровой сотовой системой связи, которая использует способы множественного доступа с временным разделением каналов (TDMA). При передаче речевой информации микротелефон передает пакет данных в продолжение временного интервала, равного 15/26 миллисекундам. В один TDMA-кадр входят восемь временных интервалов, и микротелефон, в первичном режиме работы, осуществляет передачу в продолжение только одного из этих кадров. Следовательно, передатчик активизирован только 12.5% времени. Соответственно, линия связи управления для этой системы (т.е. отпирающий импульс 110 на фиг.2) будет указывать активную передачу в 12.5% времени. Это приводит к отсутствию пропускания и/или игнорированию GPS-приемником 130 входных GPS-данных на указанный период времени. Периоды "выключения" являются очень короткими, менее периода одного GPS-кода (977.5 микросекунд) и только около 1/20 длительности бита GPS-данных. Реальные потери чувствительности составляют коэффициент в 0.875 или -0.58 dB.
Другой вариант осуществления настоящего изобретения может использоваться в Североамериканской системе TDMA IS-136. Система IS-136 использует шесть временных интервалов на период 40-миллисекундного кадра. Для полноскоростной сигнализации канал речевого трафика занимает два таких интервала или 13.33 миллисекунды. Для полускоростной сигнализации канал речевого трафика занимает один временной интервал или 6.66 миллисекунды. Следовательно, для полноскоростной сигнализации не всегда возможно практически принимать информационное сообщение GPS совместно с пропусканием передачи; однако остается возможность выполнения измерения GPS PN периодов (для определения так называемых "псевдодальностей"). В этом случае результирующие потери чувствительности составляют 0.667 или -1.76 dB. Если используется полускоростная сигнализация, то результирующие потери снижаются до 0.833 или -0.76 dB.
Дополнительный вариант осуществления настоящего изобретения может использоваться в Североамериканской системе IS-95 множественного доступа с кодовым разделением каналов (CDMA). В системе IS-95 помехи между сигналами предотвращены посредством использования каждым отличного расширяющего кода по расширенному спектру. Данные организованы в 20-миллисекундные кадры. Однако при передаче сигналов на низких скоростях передачи данных (например, прерывистая речь) данные передаются в пакетах, которые занимают только часть кадра. Например, при 1200 бод пакеты данных занимают только 1/8 кадра, и в продолжение оставшейся части кадра передаваемый сигнал передается на пониженных уровнях мощности. В продолжение этих времен пониженных эмиссий может быть активизирован GPS-приемник 130. Аналогично в продолжение периодов нормальной передачи GPS-приемник 130 может быть деактивирован, то есть входной каскад приемника выключен и/или входные GPS-данные игнорируются схемами обработки. Реальные потери чувствительности для GPS-приемника в случае передачи 1200 бод эквивалентны уменьшению времени интегрирования до 7/8 от возможного в ином случае, что эквивалентно -0.58 dB. Для указанного случая 1200 бод, времена периодов передачи пакета данных составляют только 1.25 миллисекунды, что составляет малую долю бита GPS-данных (20 миллисекунд). Соответственно, стандартный GPS-приемник может продолжать демодулировать информационные сообщения со спутника при наличии отпирающего импульса 110.
Выше была описана система для снижения перекрестных помех в объединенных GPS-приемнике и блоке связного приемопередатчика. Хотя настоящее изобретение было описано в отношении конкретных возможных вариантов осуществления, очевидно, что, не удаляясь от сущности изобретения и не выходя из его контекста в широком смысле, изложенных в формуле изобретения, в указанных вариантах осуществления могут быть сделаны различные изменения и модификации. Соответственно, описание и чертежи следует рассматривать как поясняющие, а не накладывающие ограничения.

Изобретение относится к области систем связи. Раскрыт способ работы мобильного устройства, являющегося объединенным приемником спутниковой системы позиционирования и системы мобильной связи. При обнаружении первого действия выполняются две следующие операции: (i) на период времени блокируется радиопередача данных через радиолинию передачи данных из блока связи мобильного устройства и (ii) из блока связи в приемник спутниковой системы позиционирования мобильного устройства передается первый сигнал управления, разрешающий обработку сигналов системы позиционирования сигнала, принимаемых приемником в продолжение указанного периода времени. Размер указанного периода времени может быть предварительно определенным или настраиваемым. Технический результат заключается в снижении перекрестных помех между секциями связи и позиционирования объединенного приемника. 5 н. и 12 з.п. ф-лы, 6 ил.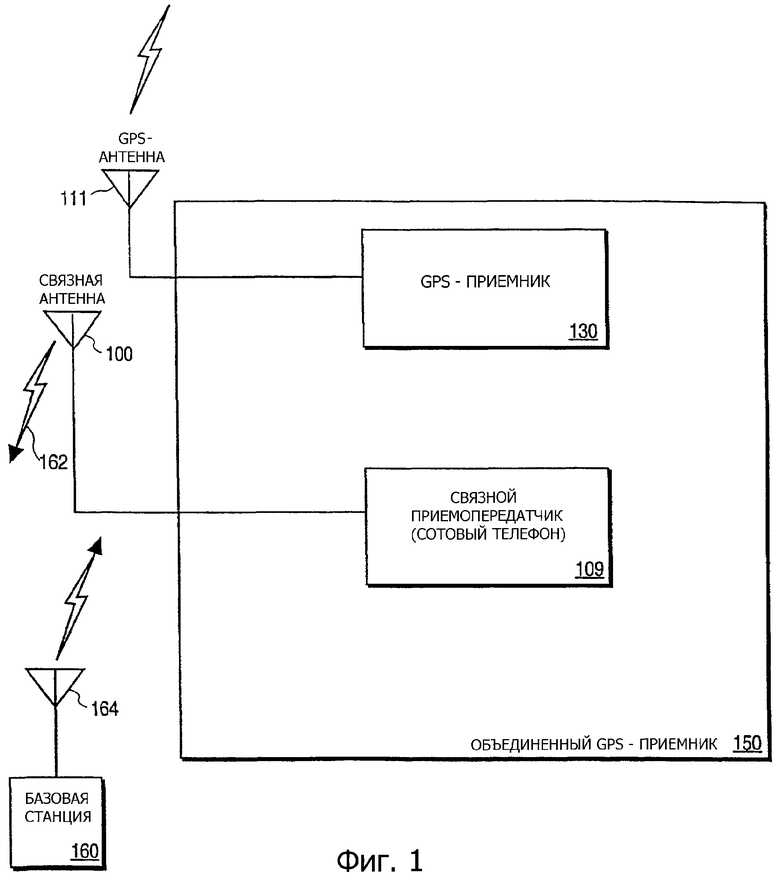
обнаружение состояния, содержащего отсутствие речи, принимаемой микрофоном мобильного устройства, или нажатие кнопки на мобильном устройстве,
при обнаружении указанного состояния:
(i) блокирование радиопередачи данных через радиолинию передачи данных из блока связи мобильного устройства, и
(ii) передачу из блока связи в приемник спутниковой системы позиционирования (GPS) мобильного устройства первого сигнала управления, разрешающего начало обработки сигналов спутниковой системы позиционирования, принимаемых приемником за период, достаточно продолжительный для того, чтобы выполнить обработку минимально необходимого объема данных GPS, причем передача данных остается блокированной в продолжение упомянутого периода, даже когда человек говорит в микрофон мобильного устройства.
(iii) разрешение радиопередачи данных через радиолинию передачи данных из блока связи после приема достаточного количества данных спутниковой системы позиционирования.
(iv) передачу второго сигнала управления из блока связи в приемник спутниковой системы позиционирования, когда разрешается радиопередача, причем второй сигнал управления блокирует обработку сигналов спутниковой системы позиционирования, принимаемых приемником.
обнаружение состояния мобильного устройства,
при обнаружении указанного состояния:
(i) блокирование радиопередачи данных через радиолинию передачи данных из блока связи мобильного устройства, и
(ii) передачу из блока связи в приемник спутниковой системы позиционирования (GPS) мобильного устройства первого сигнала управления, разрешающего начало обработки сигналов спутниковой системы позиционирования, принимаемых приемником за период, достаточно продолжительный для того, чтобы выполнить обработку минимально необходимого объема данных GPS, причем передача данных остается блокированной в продолжение упомянутого периода, даже когда человек говорит в микрофон мобильного устройства,
причем передача данных является блокированной в результате того, что пользователь мобильного устройства говорит в микрофон блока связи.
антенну спутниковой системы позиционирования (GPS) для приема сигналов спутниковой системы позиционирования от нескольких спутников спутниковой системы позиционирования,
схему приемника, соединенную с антенной системы обработки сигналов спутника для обработки сигналов спутниковой системы позиционирования,
детектор состояния мобильного устройства,
микрофон для преобразования речи в речевую информацию, радиопередатчик, выполненный с возможностью передачи речевой информации посредством радиосвязи через радиолинию передачи данных,
выходной усилитель, соединенный с радиопередатчиком, и
схему блока связи, выполненную с возможностью управления выходным усилителем для передачи сигнала посредством радиосвязи из радиопередатчика и, при обнаружении детектором указанного состояния:
(i) блокировки радиопередачи, осуществляемой выходным усилителем, и
(ii) передачи в схему приемника первого сигнала управления, для начала
обработки схемой приемника сигналов спутниковой системы позиционирования, принимаемых антенной спутниковой системы позиционирования в продолжение периода времени, достаточно продолжительного для того, чтобы выполнить обработку минимально необходимого объема данных GPS, причем выходной усилитель остается блокированным в продолжение упомянутого периода времени, даже когда человек говорит в микрофон,
причем упомянутый период времени является настраиваемым, с определением окончания упомянутого периода времени при упомянутой обработке сигналов спутниковой системы позиционирования.
кнопку, на которую может нажимать пользователь, причем упомянутое состояние содержит нажатие кнопки.
антенну спутниковой системы позиционирования (ОР8) для приема сигналов спутниковой системы позиционирования от нескольких спутников спутниковой системы позиционирования,
схему приемника, соединенную с антенной системы обработки сигналов спутника для обработки сигналов спутниковой системы позиционирования,
детектор состояния, содержащего отсутствие речи, принимаемой микрофоном,
микрофон для преобразования речи в речевую информацию,
радиопередатчик, выполненный с возможностью передачи речевой информации посредством радиосвязи через радиолинию передачи данных,
выходной усилитель, соединенный с радиопередатчиком, и
схему блока связи, выполненную с возможностью управления выходным усилителем для передачи сигнала посредством радиосвязи из радиопередатчика и, при обнаружении детектором указанного состояния:
(i) блокировки радиопередачи, осуществляемой выходным усилителем, и
(ii) передачи в схему приемника первого сигнала управления, для начала обработки схемой приемника сигналов спутниковой системы позиционирования, принимаемых антенной спутниковой системы позиционирования в продолжение периода времени, достаточно продолжительного для того, чтобы выполнить обработку минимально необходимого объема данных GPS, причем выходной усилитель остается блокированным в продолжение упомянутого периода времени, даже когда человек говорит в микрофон.
антенну спутниковой системы позиционирования (ОР8) для приема сигналов спутниковой системы позиционирования от нескольких спутников спутниковой системы позиционирования,
схему приемника, соединенную с антенной системы обработки сигналов спутника для обработки сигналов спутниковой системы позиционирования,
детектор состояния мобильного устройства,
микрофон для преобразования речи в речевую информацию,
радиопередатчик, выполненный с возможностью передачи речевой информации посредством радиосвязи через радиолинию передачи данных,
выходной усилитель, соединенный с радиопередатчиком, и
схему блока связи, выполненную с возможностью управления выходным усилителем для передачи сигнала посредством радиосвязи из радиопередатчика и, при обнаружении детектором указанного состояния
(i) блокировки радиопередачи, осуществляемой выходным усилителем, и
(ii) передачи в схему приемника первого сигнала управления, для начала обработки схемой приемника сигналов спутниковой системы позиционирования, принимаемых антенной спутниковой системы позиционирования в продолжение периода времени, достаточно продолжительного для того, чтобы выполнить обработку минимально необходимого объема данных GPS, причем выходной усилитель остается блокированным в продолжение упомянутого периода времени, даже когда человек говорит в микрофон,
причем радиопередача данных является блокированной пока пользователь мобильного устройства говорит в микрофон блока связи.
| Способ торможения судна гребным винтом | 1982 |
|
SU1122554A1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА | 2000 |
|
RU2173888C1 |
| US 6107960 А, 22.08.2000 | |||
| Способ получения усни новой кислоты из лишайников | 1956 |
|
SU106669A1 |

