Изобретение относится к радиолокации и может быть использовано в системах поиска и сопровождения воздушных и космических объектов.
Известен радиолокатор, описанный в книге Радиотехнические системы/ Под ред. Ю.М. Казаринова. - M.: Высшая школа, 1990, с. 252.
В нем осуществляется параллельный многоканальный обзор пространства. Передающая и приемная диаграмма направленности содержит несколько пересекающихся лепестков. Однако скорость обзора не может быть увеличена из-за задержки отраженных от объектов сигналов.
Известен радиолокатор, описанный в вышеупомянутом источнике на с. 252-254. В нем с помощью сканирующего передающего устройства осуществляется последовательное переключение лепестка с одного направления в другое и изучение сигнала по командам с синхронизатора. Отраженные сигналы срабатывают в смещенных по направлениям пересекающихся приемных каналах пеленгационного приемного устройства, определяющего направление моноимпульсным методом. Дальность и угловые координаты отображаются на индикаторе. Однако для уменьшения времени обзора необходимо усложнение аппаратуры, связанное с многоканальной обработкой.
С помощью предлагаемого устройства уменьшается время обзора без усложнения аппаратуры. Достигается это введением преобразователя временного положения луча в направление, двух блоков элементов совпадения, оперативного запоминающего устройства, блока счета длительности интервала, датчика длительности интервала, вычитателя с признаком отрицательной разности, сумматора, при этом группа выходов сканирующего передающего устройства через преобразователь временного положения луча в направление соединена с группой входов первого блока элементов совпадения, имеющего отдельный вход, соединенный с выходом синхронизатора и имеющего группу выходов, соединенную с первой группой входов оперативного запоминающего устройства, вторая группа входов которого соединена через блок счета длительности интервала с группой выходов датчика длительности интервала и далее через второй блок элементов совпадения соединена со второй группой входов сумматора, а третья группа входов оперативного запоминающего устройства и группа выходов соответственно соединены с группой выходов пеленгационного приемного устройства и группой входов вычитателя с признаком отрицательной разности, имеющего вторую группу входов, отдельный выход и группу выходов, соответственно соединенные с группой выходов блока счета длительности интервала, с отдельным входом второго блока элементов совпадения и с первой группой входов сумматора, группа выходов которого соединена со второй группой входов индикатора.
На чертеже и в тексте приняты следующие обозначения:
1 - синхронизатор;
2 - сканирующее передающее устройство;
3 - пеленгационное приемное устройство;
4 - преобразователь временного положения луча в направление;
5 - блок элементов совпадения;
6 - блок счета длительности интервала;
7 - оперативное запоминающее устройство;
8 - датчик длительности интервала;
9 - вычитатель с признаком отрицательной разности;
10 - блок элементов совпадения;
11 - сумматор;
12 - индикатор,
при этом выход синхронизатора 1 соединен с отдельным входом блока элементов совпадения 5 и с входом сканирующего передающего устройства 2, группа выходов которого через преобразователь временного положения луча в направление 4 через блок элементов совпадения 5 соединена с первой группой входов оперативного запоминающего устройства 7, вторая группа входов которого соединена через блок счета длительности интервала 6 с группой выходов датчика длительности интервала 8 и далее через второй блок элементов совпадения 10 соединена со второй группой входов сумматора 11, а третья группа входов оперативного запоминающего устройства 7 и группа выходов соответственно соединены с группой выходов пеленгационного приемного устройства 3 и группой входов вычислителя с признаком отрицательной разности 9, имеющего вторую группу входов, отдельный выход и группу выходов, соответственно соединенные с группой выходов блока счета длительности интервала 6, с отдельным входом блока элементов совпадения 10 и первой группой входов сумматора 11, группа выходов которого соединена со второй группой входов индикатора 12, имеющего первую группу входов, соединенную с вышеупомянутой группой выходов пеленгационного приемного устройства 3.
Работа устройства осуществляется следующим образом.
С помощью сканирующего передающего устройства 2 осуществляется последовательное переключение диаграммы направленности с одного направления в другое и излучение сигнала по командам с синхронизатора 1 с частотой 10-50 кГц. Время сканирования не должно быть меньше максимального времени запаздывания отраженного сигнала. Отраженные сигналы срабатывают в N смещенных по направлению пересекающихся приемных каналах пеленгационного приемного устройства 3, определяющего направления моноимпульсным методом. Поле зрения пеленгационного приемного устройства 3 равно зоне сканирования сканирующего передающего устройства 2. Направление отображается на индикаторе 12. Сканирующее передающее устройство 2 выдает код временного положения луча относительно начала сканирования в преобразователь временного положения луча в направление 4, который преобразует временное положение в направление относительно начала сканирования. Исполнение преобразователя 4 может быть аналогично постоянному запоминающему устройству, где для каждого значения временного положения зашивается соответствующее направление. В момент выдачи синхроимпульса с синхронизатора 1 параллельный код, характеризующий текущее направление луча, проходит через блок элементов совпадения 5 в виде адреса и признака записи в оперативное запоминающее устройство 7 для записи кода, характеризующего время с блока счета длительности интервала 6. Последний осуществляет счет времени внутри интервала до тех пор, пока это время не сравняется с кодом длительности интервала, постоянно поступающего на другую группу его входов с датчика длительности интервала 8.
Далее блок счета длительности интервала 6 устанавливается в исходное состояние и снова осуществляет счет времени. Исполнение блока 6 аналогично преобразователю дальности. Величина кода длительности интервала является постоянной величиной и должна превышать максимальное время запаздывания отраженного от объекта сигнала. Адрес для считывания, являющийся в то же время и признаком считывания в оперативное запоминающее устройство 7 также поступает в виде направления на объект с пеленгационного передающего устройства 3, и когда направление с пеленгационного приемного устройства 3 совпадает с ранее поступившим направлением луча со сканирующего передающего устройства 2, в оперативном запоминающем устройстве 7 произойдет считывание запомненной информации о времени внутри интервала с блока 6 в вычитатель с признаком отрицательной разности 9. На другой вход вычислителя 9 поступает текущее время внутри интервала с блока 6, и положительная разность будет характеризовать дальность до объекта в том случае, если текущая величина времени будет превышать считанную. Если же считанная величина времени с оперативного запоминающего устройства будет превышать текущую, это свидетельствует о том, что при записи значениe времени с блока счета длительности интервала 6 поступило при одном интервале времени, а при считывании - при следующем интервале времени. В этом случае отрицательная разность с выхода вычитателя с признаком отрицательной разности 9 не будет характеризовать дальность, и вычитатель 9 выдаст сигнал признака отрицательной разности в блок элементов совпадения 10, разрешающий прохождение информации о длительности интервала с датчика длительности интервала 8 через этот блок 10 в сумматор 11.
В последнем произойдет сложение длительности интервала с датчика 8 с отрицательным значением разности с вычитателя 9. Сумма будет характеризовать дальность до объекта. Ранее же упомянутая положительная разность с вычитателя 9 не изменится при прохождении через сумматор 11, так как сложится с нулевой величиной, поступающей на другой вход сумматора с блока элементов совпадения 10 в связи с тем, что при отсутствии признака отрицательной разности с вычитателя 9 блок элементов совпадения 10 не будет пропускать информацию. Информация о дальности до объекта с выхода сумматора 11 поступает в индикатор 12 для отображения на направлении, поступающем с пеленгационного приемного устройства 7.
Приведем пример исполнения устройства.
Пусть луч, представляющий из себя ряд пересекающихся по углу места диаграмм направленности круговой фазированной антенной решетки, осуществляет круговой обзор пространства. Ширина луча по азимуту 3o по углу места 60o, частота излучения зондирующих импульсов 30 кГц. Если принять, что после каждого перемещения луча на величину 20 мин излучается один импульс, то время обзора пространства будет составлять 36 мс, а частота сканирования 28 Гц. Пеленгационное приемное устройство также выполняется в виде круговой решетки и имеет разрешающую способность по азимуту менее 20 мин.
Данная частота сканирования сохраняет энергетические характеристики, так как объекты постоянно облучаются с частотой 28 Гц, а следовательно, и сохраняется максимальная дальность обнаружения по сравнению с аналогами и устройствами, где частота следования зондирующих импульсов зависит от максимального времени запаздывания отраженного от объекта сигнала.
Предлагаемое устройство можно использовать для поиска воздушных и космических объектов. Уменьшение времени обзора улучшает качество автосопровождения. Отсутствие большого количества узлов обработки в процессе многоканального приема отраженных сигналов обеспечивает экономический эффект в процессе изготовления.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2010 |
|
RU2447456C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2358280C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2012 |
|
RU2479851C2 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
Изобретение относится к радиолокации. Технический результат заключается в том, что радиолокатор уменьшает время обзора без усложнения аппаратуры благодаря введению преобразователя временного положения луча в направление, двух блоков элементов совпадения, оперативного запоминающего устройства, блока счета длительности интервала, датчика длительности интервала, вычитателя с признаком отрицательной разности, сумматора при этом группа выходов сканирующего пeредающего устройства через преобразователь временного положения луча в направление соединена с группой входов первого блока элементов совпадения, имеющего отдельный вход, соединенный с выходом синхронизатора и имеющего группу выходов, соединенную с первой группой входов оперативного запоминающего устройства, вторая группа входов которого соединена через блок счета длительности интервала с группой выходов датчика длительности интервала, группа выходов которого через второй блок элементов совпадения соединена со второй группой входов сумматора, а третья группа входов оперативного запоминающего устройства и группа выходов соответственно соединены с группой выходов пеленгационного приемного устройства и группой входов вычитателя с признаком отрицательной разности, имеющего вторую группу входов, отдельный выход и группу выходов, соответственно соединенные с группой выходов блока счет длительности интервала, отдельным входом блока элементов совпадения и первой группой входов сумматора, группа выходов которого соединена со второй группой входов индикатора. 1 ил.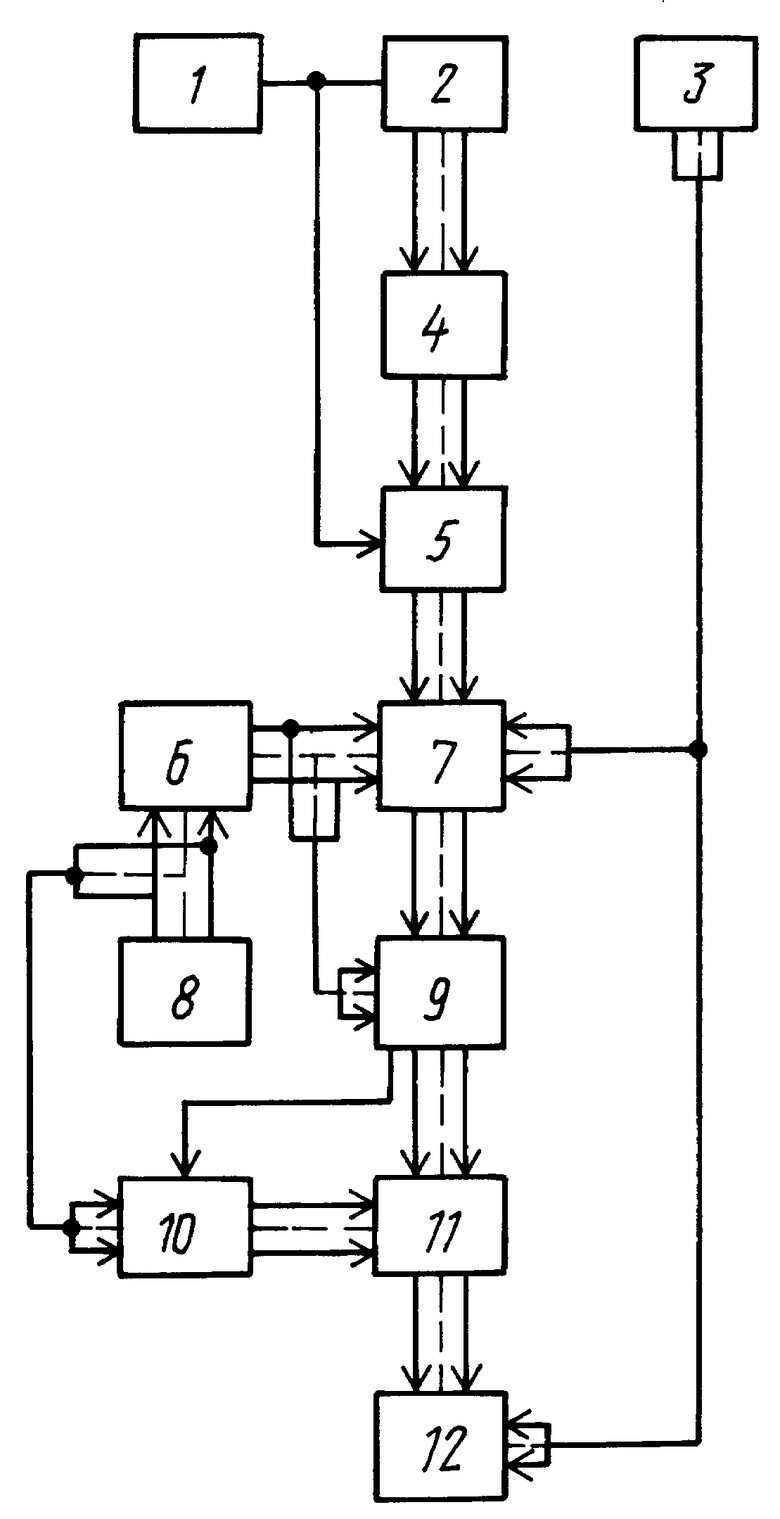
Радиолокатор, состоящий из синхронизатора, сканирующего передающего устройства, пеленгационного приемного устройства и индикатора, где выход синхронизатора соединен с входом сканирующего передающего устройства, а группа выходов пеленгационного приемного устройства соединена с первой группой входов индикатора, отличающийся тем, что вводится преобразователь временного положения луча в направление, два блока элементов совпадения, оперативно-запоминающее устройство, блок счета длительности интервала, датчик длительности интервала и вычитатель с признаком отрицательной разности, при этом группа выходов сканирующего передающего устройства через преобразователь временного положения луча в направление соединена с группой входов первого блока элементов совпадения, имеющего отдельный вход, соединенный с выходом синхронизатора, и имеющего группу выходов, соединенную с первой группой входов оперативного запоминающего устройства, вторая группа входов которого соединена через блок счета длительности интервала с группой выходов датчика длительности интервала, второй блок элементов совпадения, разрешающий прохождение через него информации о длительности интервала с датчика длительности интервала в сумматор, а третья группа входов оперативного запоминающего устройства и группа выходов соответственно соединены с группой выходов пеленгационного приемного устройства и группой входов вычитателя с признаком отрицательной разности, имеющего вторую группу входов, отдельный выход и группу выходов, соответственно соединенные с группой выходов блока счета длительности интервала, отдельным входом второго блока элементов совпадения и первой группой входов сумматора, группа выходов которого соединена со второй группой входов индикатора.
| Радиотехнические системы /Под ред | |||
| проф | |||
| Ю.М.Казаринова | |||
| - М.: Высшая школа, 1990, с | |||
| Телефонно-трансляционное устройство | 1921 |
|
SU252A1 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| РАДИОЛОКАТОР | 1990 |
|
RU2032184C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
| US 4456911 A, 26.06.1984 | |||
| 1973 |
|
SU425141A1 | |
| US 4881078 A, 14.11.1989. | |||
