Способ обработки сигналов при одноканальной амплитудной пеленгации источников импульсных и непрерывных сигналов с подавлением ложных обнаружений по боковым лепесткам диаграммы направленности приемной антенны
Изобретение относится к радиопеленгационным системам и может быть использовано для обработки сигналов при одноканальной амплитудной пеленгации.
Известен способ [1, стр.274-276] обработки сигналов при одноканальной амплитудной пеленгации, при котором формируют диаграмму направленности (ДН), перемещающуюся в секторе поиска, принимают сигнал, селектируют его по частоте, линейно детектируют его по амплитуде, обнаруживают и, перемещая ДН в секторе поиска, вычисляют абсциссу центра тяжести полученной реализации сигнала и пересчитывают ее в пеленг.
Недостатками этого способа являются сложность стабилизации вероятности определения ложных пеленгов и невысокая точность пеленгования из-за сильного влияния динамических характеристик тракта, большая вероятность ложного обнаружения при поиске сканирующего источника излучения, когда главный лепесток ДН антенны источника излучения попадает в боковой лепесток ДН антенны устройства, реализующего данный способ, а также отсутствие в системе возможности определения характера излучения (импульсное или непрерывное).
Известен также способ обработки сигналов при одноканальной амплитудной пеленгации [2], принятый за прототип, при котором формируют ДН, перемещающуюся в секторе поиска, пространственно манипулируют перемещающуюся ДН на ее ширину по уровню 3 дБ со скоростью, существенно большей скорости перемещения, принимают сигнал, селектируют по частоте, детектируют по амплитуде и демодулируют по частоте манипуляции, обнаруживают и по зафиксированным при этом реализациям сигнала вычисляют абсциссы центров тяжести, и по их среднему значению оценивают пеленг.
Недостатками прототипа является сложность реализации алгоритмов снижения вероятности определения ложных пеленгов, большая вероятность ложного обнаружения при поиске сканирующего источника излучения, когда главный лепесток ДН антенны источника излучения попадает в боковой лепесток ДН антенны устройства, реализующего данный способ, а также отсутствие в системе возможности определения характера излучения (импульсное или непрерывное).
Целью настоящего изобретения является снижение вероятности определения ложных пеленгов при обнаружении сканирующего источника импульсного или непрерывного излучения и повышение точности пеленгования в данном случае, а также однозначное определение характера излучения.
Для достижения поставленной задачи предлагается способ обработки сигнала при одноканальной амплитудной пеленгации, при котором антенной системой формируют ДН, которую перемещают в секторе поиска последовательно три раза.
На каждом сканировании принимают сигнал, селектируют его по частоте, пропускают через аналогово-цифровой преобразователь. Обнаруживают импульсный сигнал по факту превышения заранее рассчитанного порога, непрерывный обнаруживают аналогично, но после некогерентного накопления всех отсчетов пачки текущей частоты.
Запоминают амплитуду, частоту, азимут антенны и флаг типа излучения при обнаружении для обоих случаев, корректируют амплитуду накопленного сигнала на эмпирически подобранный коэффициент, чтобы далее корректно сопоставлять амплитуды импульсных и непрерывных сигналов. Сохраняют эти данные в процессе каждого сканирования в матричной форме, определяют максимальное значение амплитуды обнаружения, его азимут и частоту за каждое сканирование в отдельности, посредством весовой обработки вычисляют оценку каждого параметра для соответствующих обнаружений. После окончания всех сканирований проводят анализ - если из всех трех сканирований только в одном имело место обнаружение источника излучения на данном пеленге на данной частоте, то его игнорируют в последующей обработке.
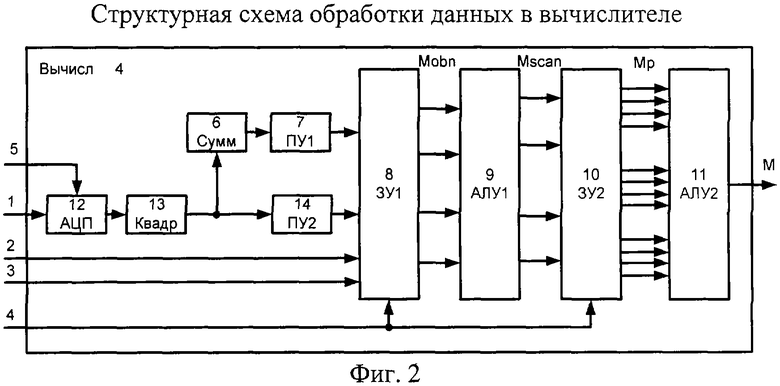
На фигурах 1 и 2 представлены структурные схемы устройства в целом и вычислителя.
При реализации предлагаемого способа выполняется следующая последовательность операций:
- антенной системой формируют ДН, перемещающуюся в секторе поиска;
- сканирование в секторе поиска осуществляют последовательно три раза;
- параллельно осуществляют циклическое сканирование по частоте в достаточно большом диапазоне;
- принятый сигнал селектируют по частоте и пропускают через аналогово-цифровой преобразователь;
- обнаружение импульсного сигнала производят по факту превышения порога обнаружения относительно уровня собственных шумов с учетом некоторого запаса, непрерывный сигнал обнаруживают аналогично, но после накопления всех отсчетов;
- корректируют амплитуду накопленного сигнала на коэффициент, подобранный эмпирическим путем, для дальнейшей совместной обработки обнаружений как по импульсному излучению, так и по непрерывному;
- если на определенной частоте и азимуте происходит превышение того или иного порога, или обоих порогов сразу, т.е. происходит обнаружение, тогда запоминают амплитуду, частоту, азимут антенны и флаг типа излучения в матрице Mobn;
- после окончания каждого сканирования по азимуту обрабатывают матрицу Mobn: находят обнаружение с максимальной амплитудой, определяют его азимут и частоту; формируют совместное окно по частоте и азимуту относительно частоты и азимута найденного обнаружения; все обнаружения, попавшие в совместное окно, принимают за один источник излучения; по каждому параметру (частота и азимут) этих обнаружений проводят весовую обработку и заполняют матрицу текущего сканирования Mscan;
- после окончания всех сканирований по углу путем объединения всех матриц Mscan формируют промежуточную матрицу Мр;
- проводят постобработку матрицы Мр: формируют окно по частоте аналогично предыдущей постобработке матрицы Mobn; для обнаружений, попавших в это окно, проводят анализ; если из всех трех сканирований только в одном имело место обнаружение источника излучения на данном пеленге на данной частоте, то его игнорируют в последующей обработке; для параметров неудаленных обнаружений также проводят весовую обработку; в результате выдается матрица источников излучений М.
Устройство, реализующее предлагаемый способ, содержит (см. фиг.1): последовательно соединенную антенную систему (АС) 1 на базе двух вибраторов; устройство управления диаграммой направленности (УУДН) 2, предназначенное для переключения вибраторов антенной системы при пеленгации в режиме автосопровождения источников излучения; радиоприемное устройство с регулируемым коэффициентом передачи 3; вычислитель 4, где осуществляются все основные операции по обработке сигнала; устройство управления и синхронизации 5 (УУС), которое определяет синхронизацию по времени работы всей системы в целом.
Устройство работает следующим образом: сигнал поступает на антенную систему 1, положение диаграммы направленности которой определяет устройство управления диаграммой направленности 2, принятый антенной сигнал подается на радиоприемное устройство 3, где он селектируется по частоте, усиливается, переносится на нулевую промежуточную частоту и поступает на вычислитель 4.
На вход 1 вычислителя поступает сигнал с радиоприемного устройства (см. фиг.2), на вход 2 поступает информация о его частоте, на вход 3 из антенной системы поступает информация о текущем положении ДН по азимуту относительно строительной оси антенны, на вход 4 поступает номер текущего сканирования, на вход 5 поступает синхронизирующий сигнал.
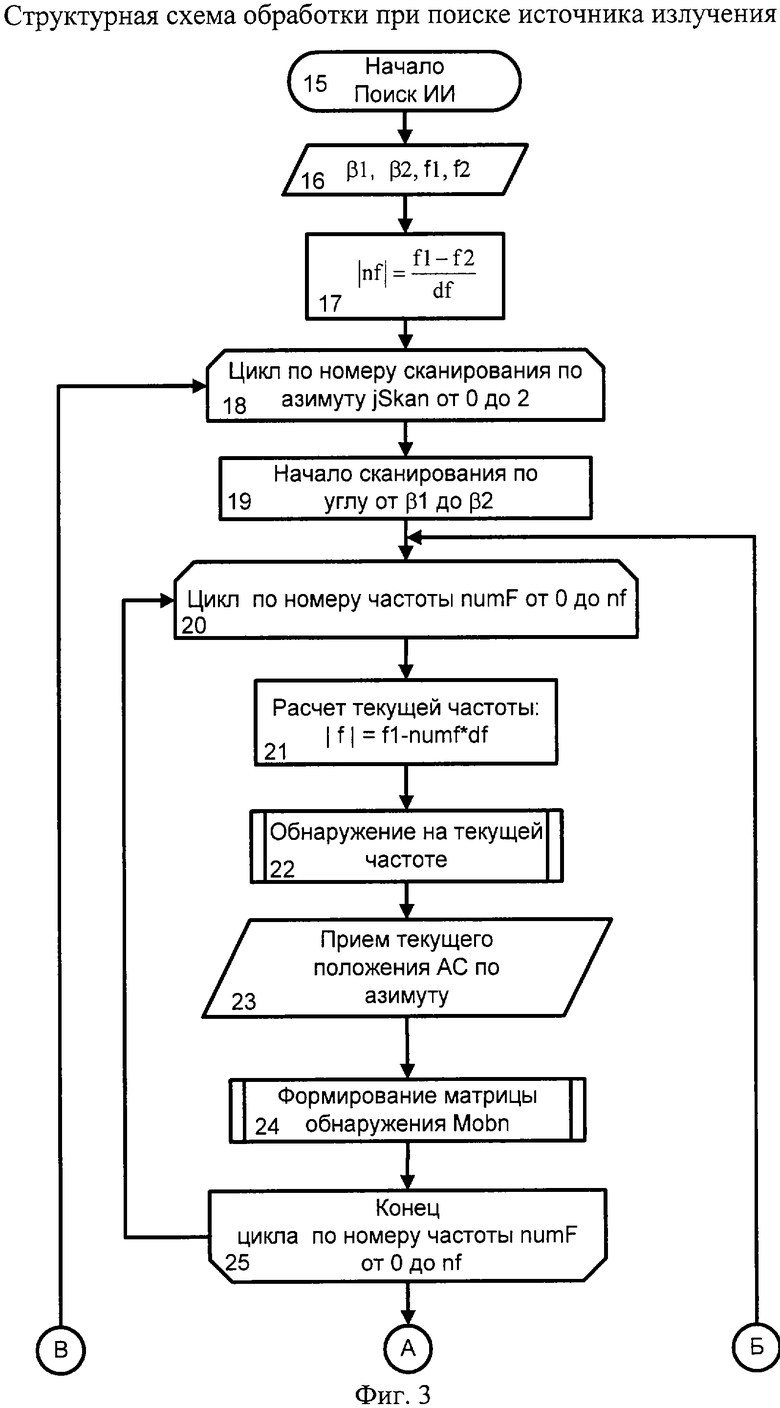
Основные операции по обработке сигнала производятся в вычислителе, алгоритм работы которого представлен на фиг.3. В процессе работы все промежуточные данные сохраняются в матричной форме. После окончания сканирования по углу формируется матрица обнаружения текущего сканирования Mobn. Каждый столбец матрицы содержит параметры одного обнаружения: его номер, частоту, азимут, амплитуду и флаг типа излучения (1 - непрерывное, 0 - импульсное). В результате каждого сканирования по азимуту формируется своя матрица обнаружения.
На начальном этапе работы осуществляется прием исходных данных, которые содержат диапазон поиска по частоте от f1 до f2 и сектор сканирования по азимуту от β1 до β2 (см. фиг.3, блок 16). Затем осуществляется расчет количества шагов по частоте nf (блок 17) через диапазон поиска по частоте и шаг поиска по частоте df, который определяется полосой пропускания выходного каскада РПрУ (см. фиг.1). Далее начинает выполняться цикл по номеру сканирования по азимуту (блок 18). Здесь дается команда АС (см. фиг.1) на сканирование по азимуту от β1 до β2 (блок 19). Параллельно начинает выполняться цикл сканирования по частоте (блок 20). Внутри цикла производится расчет и настройка РПрУ на текущую частоту (блок 21). Далее происходит обнаружение (блок 22). В результате обнаружения выдаются две амплитуды - по импульсному и по непрерывному излучению. Затем осуществляется прием текущего положения АС по азимуту (блок 23).
Таким образом, текущая частота и азимут, а также обе амплитуды поступают на ЗУ1 (см. фиг.2) для формирования матрицы обнаружений Mnbn. Для каждой ненулевой аплитуды обнаружения заполнятся отдельный столбец матрицы Mobn. Также в процессе формирования матрицы Mobn корректируется амплитуда обнаружения по непрерывному излучению, и определяется флаг типа излучения (0 - непрерывное, 1 - импульсное). После окончания цикла по частоте передается запрос в АС об окончании сканирования по углу (блок 26). Если оно не закончено, цикл по частоте повторяется. В противном случае выполняется постобработка матрицы обнаружения Mobn после одного сканирования по углу.
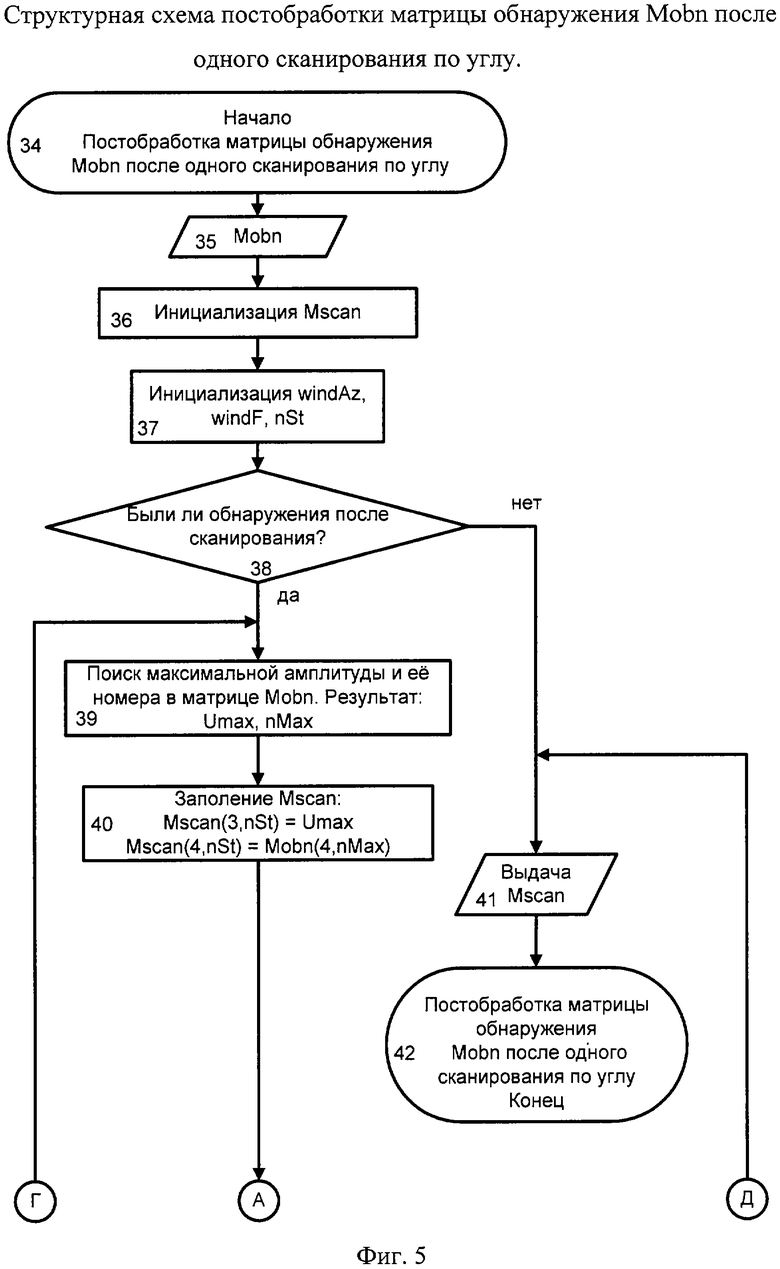
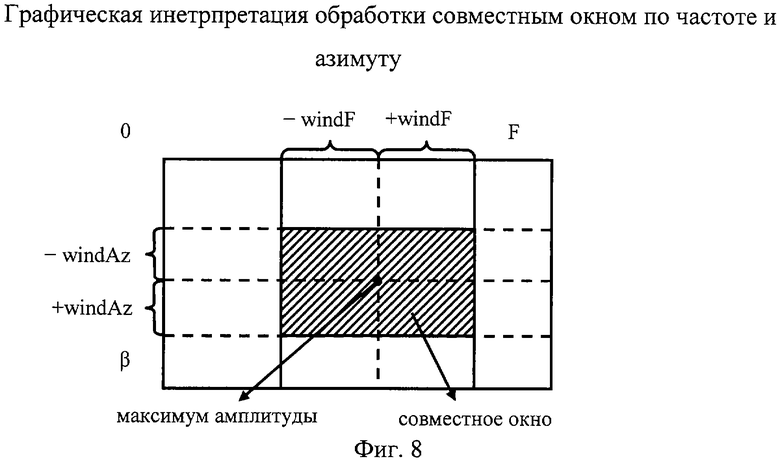
Эта постобработка осуществляется в АЛУ1 (см. фиг.2). Структура данной постобработки представлена на фигурах 5, 6 и 7. В качестве исходных данных принимается матрица обнаружения после одного сканирования по углу Mobn (см. фиг.5, блок 35), которая поступает из ЗУ1 (см. фиг.2). Затем происходит инициализация матрицы после одного сканирования Mscan (блок 36), которая будет хранить результат выполнения данной постобработки и имеет ту же структуру, что Mobn. Далее инициализируются переменные, определяющие ширину окна по частоте windF, ширину окна по азимуту windAz (см. фиг.8), и переменная nSt, которая представляет собой начальный номер столбца матрицы Mscan (блок 37). Переменная windF выбирается из тех соображений, что два источника излучения должны быть разнесены по частоте не менее чем на windF, иначе они будут оказывать влияние друг на друга. Переменная windAz численно равна половине ширины ДН антенны вибратора АС. Окна по частоте и азимуту охватывают интервалы ±windF и ±windAz относительно частоты и азимута сигнала с максимальной амплитудой (см. фиг.8).
Далее проводится проверка, были ли обнаружения после сканирования (блок 38). Если обнаружение имело место, то производится поиск максимального значения амплитуды по всем столбцам матрицы обнаружения Mobn (блок 39). Затем максимальное значение записывается в третью строку Mscan, в столбец с номером nSt, и считается, что это амплитуда nSt-ого источника излучения (ИИ). В четвертую строку матрицы Mscan записывается флаг типа излучения обнаружения с максимальной амплитудой, и считается, что это - флаг излучения nSt-ого ИИ.
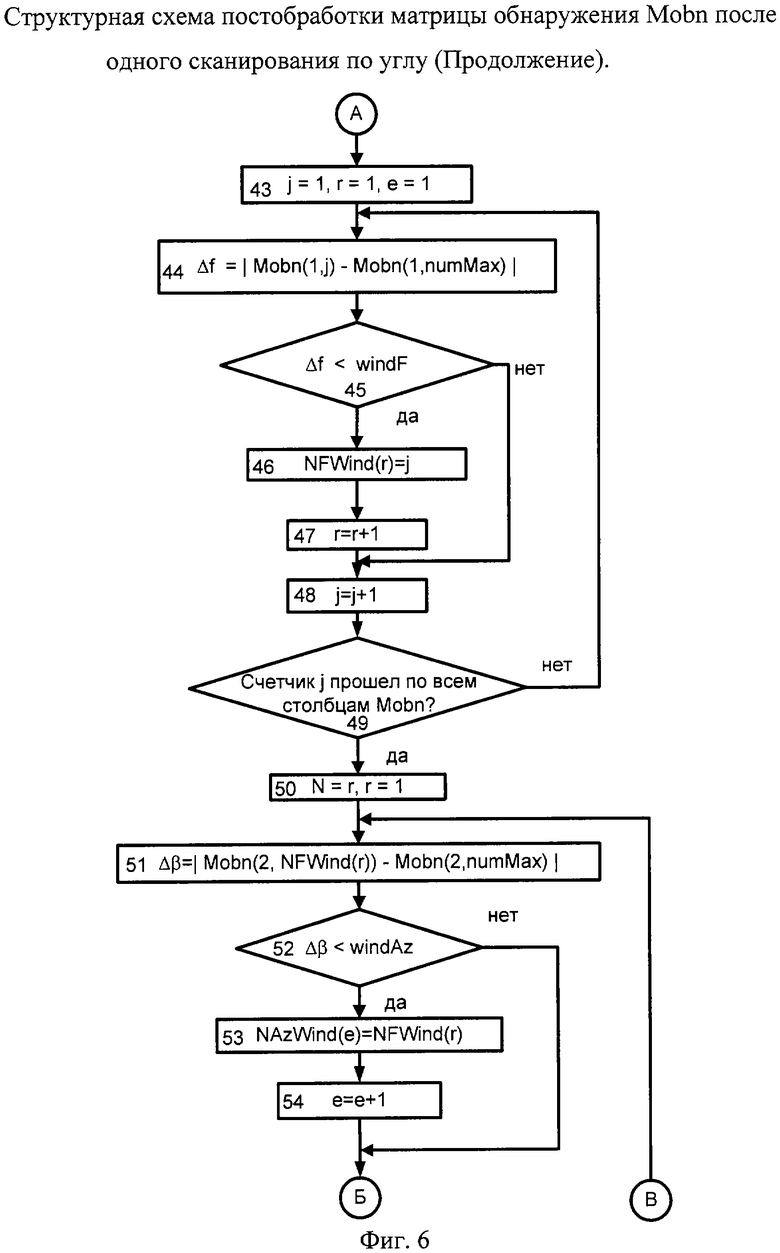
Следующий цикл по номеру столбца j необходим для определения номеров столбцов матрицы Mobn, частоты которых попали в окно по частоте ±windF, относительно частоты максимума амплитуды. На первом шаге здесь рассчитывается разница по модулю между частотой из первого столбца и частотой максимума. Эта разница присваивается переменной Δf (см. фиг.6, блок 44). Далее проводится проверка, попадает ли в окно частота первого столбца (блок 45). Если попадает, то запоминаем номер столбца в массиве NFWind. Затем цикл повторяется для следующего столбца матрицы Mobn. В результате выполнения данного цикла получаем массив номеров столбцов матрицы обнаружения, попавших в окно по частоте. В блоке 50 определяется переменная N, в которой запоминается длина массива NFWind (число обнаружений, попавших в окно по частоте).
Следующий цикл по номеру столбца r массива NFWind работает по такому же принципу. Здесь формируется окно по азимуту, но только по тем элементам, которые попали в окно по частоте, поэтому берутся номера столбцов массива NFWind. В результате этого цикла формируется массив NazWind номеров столбцов матрицы обнаружения Mobn, попавших в совместное окно по частоте и азимуту. Переменная е используется как счетчик номеров элементов массива NazWind. После окончания цикла она содержит длину массива (число обнаружений, попавших в совместное окно по азимуту и по частоте).
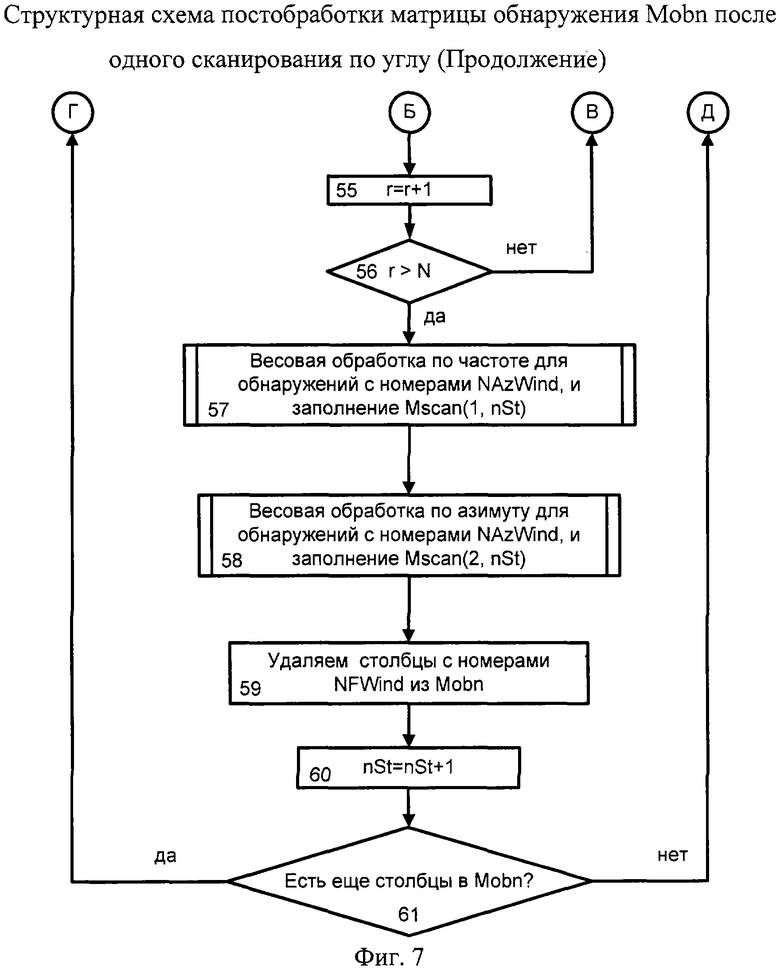
Все обнаружения, которые попали в совместное окно по частоте и азимуту вокруг максимума, принимаются за один ИИ. Чтобы получить оценку азимута и частоты данного ИИ, проводится весовая обработка по соответствующим строкам матрицы обнаружения (блоки 57, 58), но номера столбцов берутся из массива NazWind. Весовая обработка проводится по формуле:
где β - оценка значения положения ИИ по азимуту для обнаружения, которое определяется Umax;
βi - значение азимута i -го обнаружения, попавшего в совместное окно по азимуту и частоте;
Ui - значение амплитуды i-го обнаружения, попавшего в совместное окно по азимуту и частоте.
По аналогичной формуле производится оценка частоты обнаруженного сигнала.
Далее из матрицы Mobn удаляются отработанные столбцы, попавшие в окно по частоте, т.е. с номерами из массива NFWind. Затем номер столбца nSt матрицы Mscan увеличивается на единицу (блок 60), и проводится проверка, были ли еще обнаружения в матрице Mobn (блок 61). Если были, то весь цикл повторяется и формируется следующий столбец матрицы Mscan. Иначе данная постобработка закончена, и матрица Mscan выдается для последующей обработки.
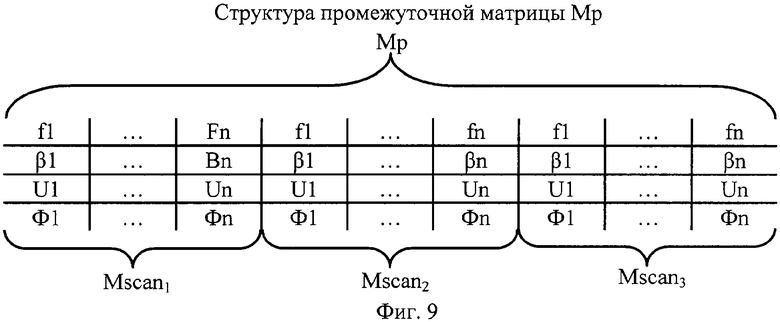
Матрица Mscan поступает на ЗУ2 (см. фиг.2), где хранится она и все последующие матрицы Mscan. Как только последнее сканирование по азимуту закончено, все матрицы Mscan объединяются в матрицу Мр и поступают на АЛУ2. Матрица Мр имеет структуру, представленную на фиг.9.
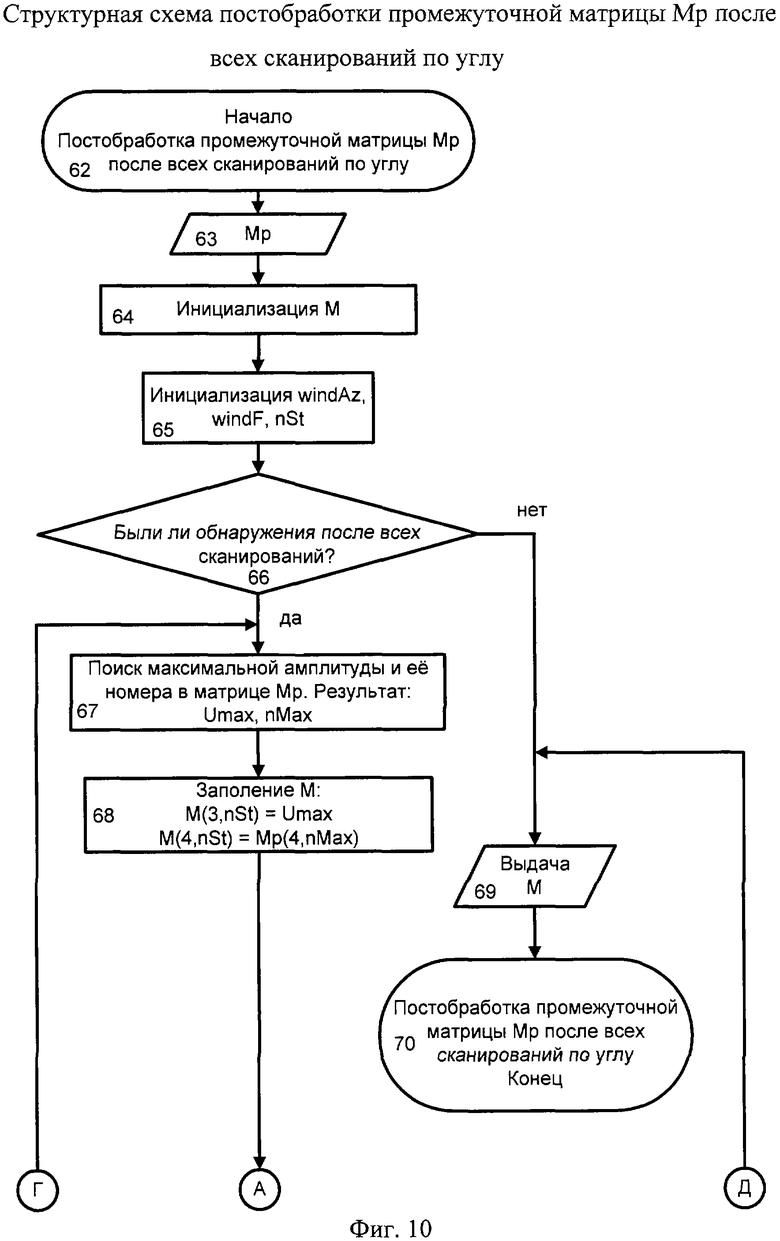
АЛУ2 осуществляет постобработку матрицы Мр после всех сканирований по углу (см. фиг.4, блок 31). Результатом выполнения данной постобработки является матрица источников излучений М.
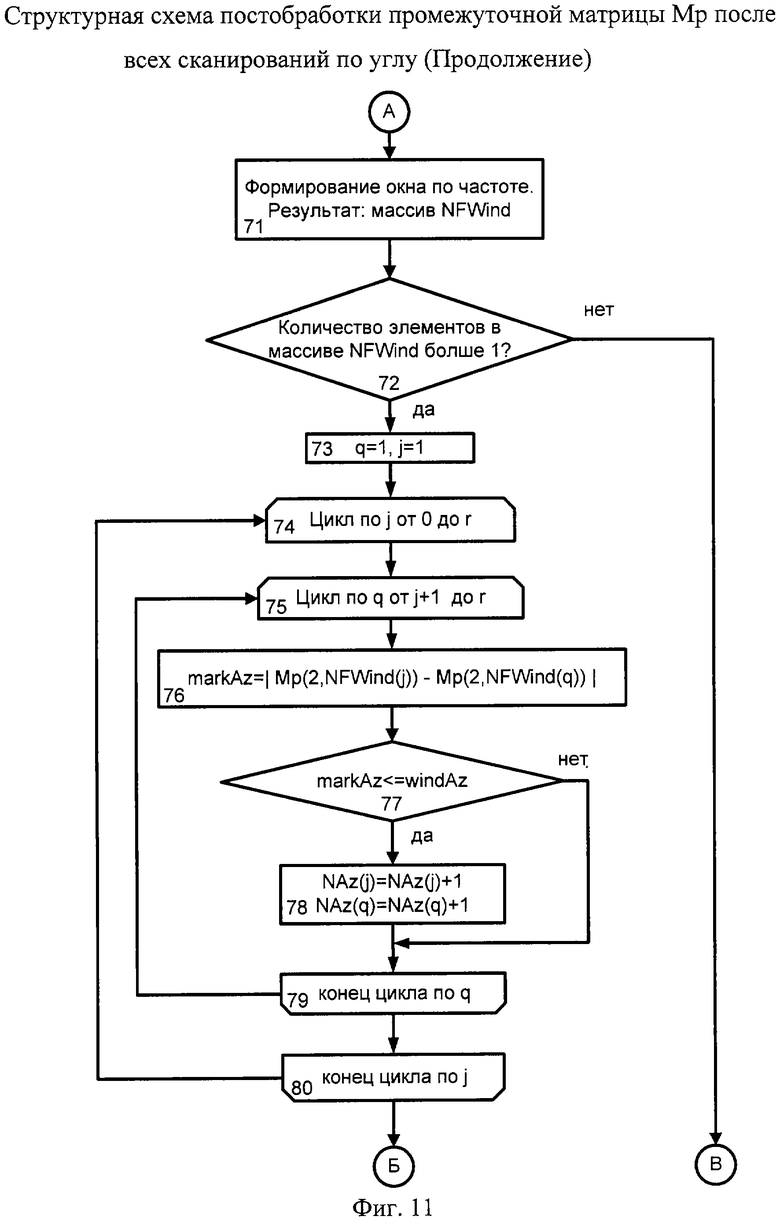
Схема данной постобработки представлена на фигурах 10, 11 и 12. В качестве исходных данных принимается промежуточная матрица после всех сканирований по углу Мр (см. фиг.10, блок 63). Затем происходит инициализация конечной матрицы источников излучений М (блок 64). Последующая обработка во многом аналогична описанной выше. Отличие заключается в том, что после формирования окна по частоте (блок 71) проводится проверка на количество обнаружений, попавших в окно по частоте (блок 72). Если оно одно, то считается, что это обнаружение произошло, когда главный лепесток ДН антенны ИИ попал в боковой лепесток ДН антенны устройства, реализующего данный способ (см. фиг.1). Такое обнаружение удаляется.
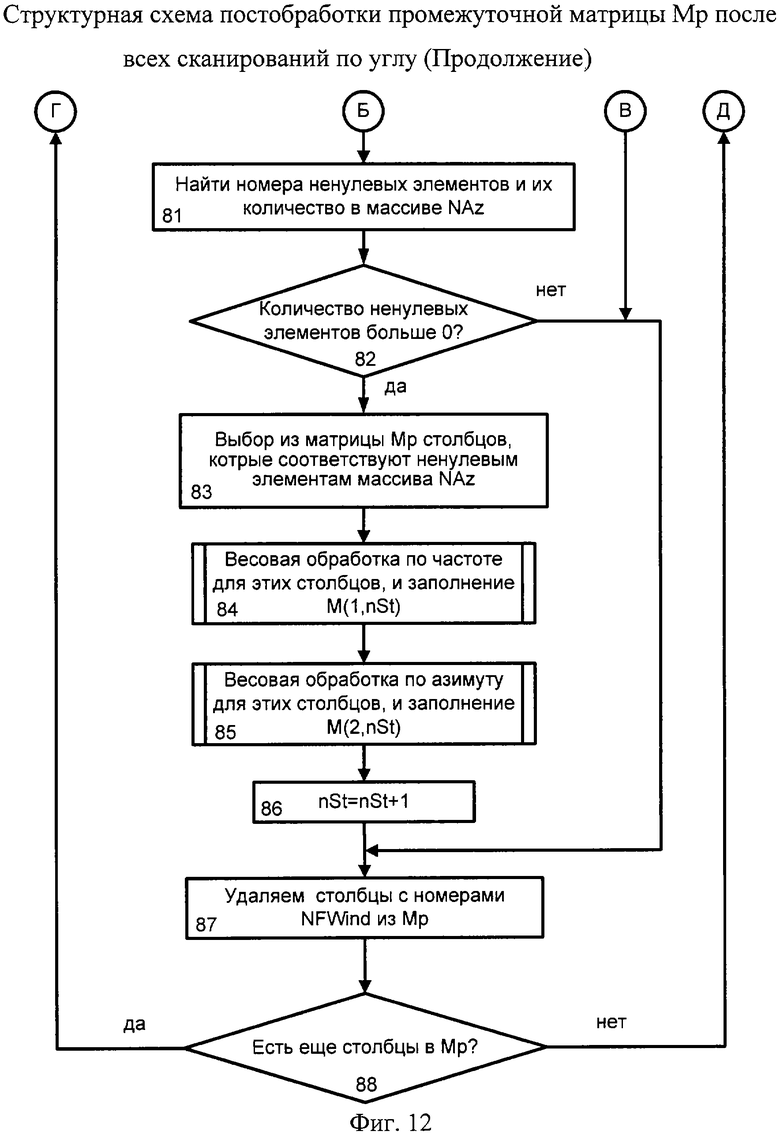
Если обнаружений больше одного, то проводится следующая постобработка: берется первый азимут из попавших в окно и из него вычитается второй (блок 76), если эта разница меньше окна по азимуту, то взводится счетчик совпадений для этих азимутов в массиве NAz (блок 78). Таким образом, происходит подсчет совпадений для каждого азимута из тех, которые попали в окно по частоте. Затем проводится проверка, есть ли такие азимуты, для которых число совпадений равно нулю (блок 82). Если такие азимуты есть, то необходимо их удалить.
Далее проводится весовая обработка параметров обнаружений, для которых количество совпадений из массива NAz больше нуля (блоки 84, 85), и заполнение матрицы М. Данная весовая обработка происходит по формуле (1).
Затем увеличивается счетчик номеров столбцов матрицы М (блок 86), и обработанные столбцы обнаружений, попавшие в окно по частоте, удаляются из матрицы Мр (блок 87). Далее цикл повторяется для другого источника излучения, или осуществляется выдача матрицы М.
Таким образом, использование трех сканирований по азимуту при реализации способа обработки сигналов при одноканальной амплитудной пеленгации позволяет существенно уменьшить вероятность ложных пеленгов при обнаружении сканирующего источника импульсного или непрерывного излучения, а использование двух пороговых устройств отдельно для импульсного и непрерывного излучения позволяет однозначно определить его характер.
ЛИТЕРАТУРА
1. Теоретические основы радиолокации по ред. Я.Д.Ширмана, М. Сов. радио, 1970 г.
2. Патент Россия №2159940 С1, кл. G01S 3/14 от 08.06.1999, Способ обработки сигналов при одноканальной пеленгации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2013 |
|
RU2529867C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2159940C1 |
| СПОСОБ ПЕЛЕНГАЦИИ МНОЖЕСТВА ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ, ОДНОВРЕМЕННО ПОПАДАЮЩИХ В ПОЛОСУ ПРИЕМА | 2001 |
|
RU2207583C1 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| СПОСОБ ПЕЛЕНГАЦИИ С УЧЕТОМ КОРРЕЛЯЦИОННОЙ ВЗАИМОСВЯЗИ МЕЖДУ ЛУЧАМИ | 2005 |
|
RU2305294C2 |
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2005 |
|
RU2305850C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННО-ПИЛОТАЖНОЙ ИНФОРМАЦИИ ДЛЯ СУДОВ И ОТВЕТЧИК | 1993 |
|
RU2075763C1 |
| СПОСОБ ОЦЕНКИ УГЛОВЫХ ПАРАМЕТРОВ ИОНОСФЕРНЫХ СИГНАЛОВ | 2012 |
|
RU2518013C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |

Изобретение может быть использовано для обработки сигналов при одноканальной амплитудной пеленгации. Достигаемым техническим результатом изобретения является уменьшение количества ложных тревог, а также определение характера излучения (импульсное или непрерывное). Сущность изобретения заключается в том, что формируют диаграмму направленности, перемещающуюся в секторе поиска от β1 до β2 (первое сканирование), затем от β2 до β1 (второе сканирование), и снова от β1 до β2 (третье сканирование), параллельно осуществляется циклическое сканирование по частоте. Затем принимают сигнал и обнаруживают импульсный сигнал по факту превышения максимального уровня собственных. Для обнаружения непрерывного сигнала все отсчеты на текущей пачке суммируются, и в результате образуется амплитуда обнаружения. Обнаружение происходит по факту превышения данной амплитудой ранее рассчитанного порога. Запоминают в матричной форме полученную амплитуду обнаружения, частоту обнаружения, азимут антенны и флаг излучения для обоих случаев. Производят накопление этих данных в процессе каждого сканирования, по этим данным проводят весовую обработку пеленгов обнаружений для каждого сканирования. При этом выравнивание амплитуд обнаружения импульсного и непрерывного сигналов производится путем нормировки на коэффициент, подобранный эмпирическим путем. Используя весовую обработку, оценивают частоту обнаруженного сигнала. Затем по всем сканированиям производят селекцию - если из всех трех сканирований только в одном имело место обнаружение источника излучения на данном пеленге, то его игнорируют в последующей обработке. В результате выдается матрица обнаруженных источников излучения. 12 ил.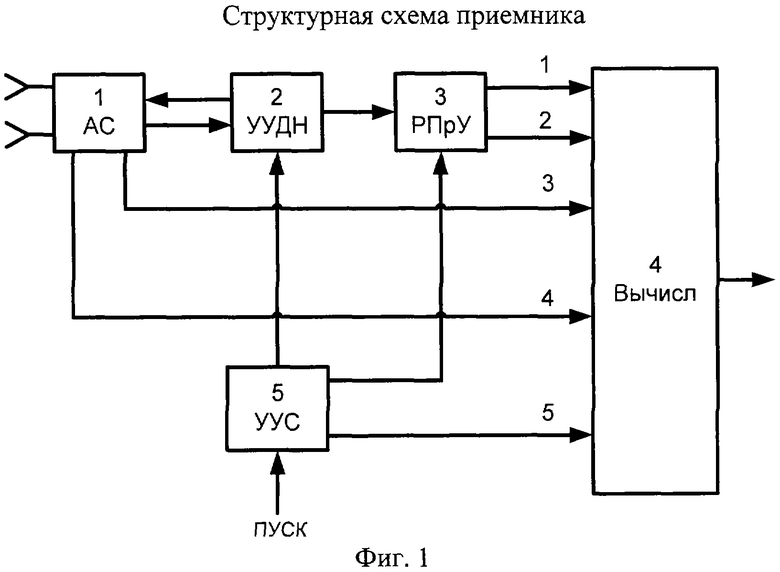
Способ обработки сигналов при одноканальной амплитудной пеленгации источников импульсных и непрерывных сигналов с подавлением ложных обнаружений по боковым лепесткам диаграммы направленности приемной антенны, включающий формирование диаграммы направленности антенной системой, прием сигнала и селекцию его по частоте, отличающийся тем, что диаграмму направленности (ДН) перемещают в секторе поиска от β1 до β2 (первое сканирование), затем от β2 до β1 (второе сканирование), и снова от β1 до β2 (третье сканирование), параллельно производят циклическое сканирование по частоте в диапазоне от fl до f2, производят отсчеты принятого сигнала на каждой из частот, пропускают их через аналогово-цифровой преобразователь, каждый отсчет возводят в квадрат, по факту его превышения соответствующего порога обнаруживают импульсный сигнал или, после накопления всех отсчетов принятого сигнала, непрерывный сигнал, производят выравнивание амплитуд обнаруженных импульсного или непрерывного сигнала путем нормировки на коэффициент, подобранный эмпирическим путем, запоминают амплитуду каждого обнаруженного сигнала, его частоту, азимут антенны и флаг типа излучения 0 - непрерывного или 1 - импульсного, накапливают эти данные в процессе каждого сканирования в матрице обнаружения Mobn, после окончания каждого сканирования проводят постобработку, в процессе которой определяют максимальную амплитуду Umax из всех обнаружений, ее частоту Fmax и азимут βmax, за прошедшее сканирование, далее определяют все обнаружения, частоты которых расположены в промежутке Fmax±ΔF, где ΔF - диапазон значений частот, который принимается за одно обнаружение, затем из полученных значений выбирают те, азимут которых находится в диапазоне βmax±Δβ, где Δβ - ширина главного лепестка ДН вибратора антенной системы, таким образом производят формирование совместного окна по частоте и азимуту, в котором проводят весовую обработку частоты и азимута полученных обнаружений по формуле
где β - оценка положения источника излучения по азимуту,
βi - значение азимута i-го обнаружения,
Ui - значение амплитуды i-го обнаружения,
N - количество обнаружений в окне, полученные оценки частоты и азимута запоминают в матрице текущего сканирования Mscan, а использованные данные удаляют, и проводят проверку, есть ли еще данные по этому сканированию, если есть, то цикл обработки повторяют, после окончания всех сканирований все матрицы Mscan объединяют в промежуточную матрицу Мр и проводят ее постобработку, находят обнаружение с максимальной амплитудой и задают в его окрестности окно по частоте, по данным, попавшим в это окно, проводят анализ, если из всех трех сканирований только в одном имело место обнаружение источника излучения на данном азимуте, то его отбрасывают, затем проводят весовую обработку полученных данных аналогичную той, которая проводилась после каждого сканирования, и в результате получают матрицу обнаруженных источников излучения М.
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2159940C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 2000 |
|
RU2194287C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ОДНОКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2162233C1 |
| US 6069585 A, 19.12.2000 | |||
| US 4236159, 25.11.1980. | |||

