Компенсационный акселерометр предназначен для применения в качестве чувствительного элемента в системах стабилизации, наведения и навигации. Изобретение может найти применение в приборах измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (описанное в АС №742801, МПК7 опубл. в БИ №23, 1980), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент, причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент и дополнительный интегрирующий усилитель подключен к управляющему входу электронного ключа.
Недостатком устройства является низкая точность измерения, обусловленная точностью работы интегрирующих аналоговых усилителей и порогового элемента. Кроме того, точность измерения зависит от параметров схемы электронного ключа, осуществляющего выборку информации.
Наиболее близким по техническому решению является устройство для измерения ускорений (патент РФ RU №2190857 C17 G 01Р 15/13, опубл. 10.10.2002, бюл. №28), содержащее последовательно соединенные чувствительный элемент, датчик угла, усилитель и датчик момента. В цифровой канал введен трехразрядный сдвиговый регистр (схема управления потоком входной информации) с выхода компаратора на вход итогового регистра через реверсивный счетчик, и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор. В аналоговый канал введены последовательно соединенные интегратор, стабилизирующий фильтр и преобразователь напряжение-ток, причем выход преобразователя напряжение-ток соединен с входом датчиком момента, выход усилителя соединен со входом интегратора, выход которого, являющийся аналоговым выходом, соединен с первым входом первого дискретизатора, вторые входы первого дискретизатора, сумматора, компаратора, второго дискретизатора соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации, вход которой соединен со вторым выходом первого дискретизатора, пятый выход схемы синхронизации соединен со вторым входом трехразрядного сдвигового регистра, второй, третий и четвертый выходы трехразрядного сдвигового регистра соединены соответственно с первым, вторым, третьим входами реверсивного счетчика, а выход итогового регистра является выходом цифрового кода.
Недостатком устройства для измерения ускорений является малая полоса пропускания, обусловленная работой интегрирующего аналогового усилителя и порогового элемента. Малая полоса пропускания устройства для измерения ускорений, невысокое быстродействие и малый коэффициент усиления по разомкнутому контуру, определяют точность в установившемся режиме.
Технической задачей настоящего изобретения является повышение точности измерения.
Техническая задача в предполагаемом изобретении решается тем, что в компенсационный акселерометр, содержащий аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла, усилитель, а также соединенные последовательно преобразователь напряжение-ток и датчик момента и цифровой канал, включающий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, а также последовательно соединенные реверсивный счетчик и итоговый регистр, вторые входы первого дискретизатора, сумматора, второго дискретизатора и компаратора соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации, второй выход первого дискретизатора соединен с входом схемы синхронизации и выход итогового регистра является выходом цифрового кода, введены с выхода усилителя на вход преобразователя напряжение-ток последовательно соединенные между собой два изодромных звена, и выход усилителя соединен с входом первого дискретизатора.
Введение в компенсационный акселерометр двух последовательно соединенных изодромных звеньев обеспечивает астатизм второго порядка, а следовательно, повышение точности измерения.
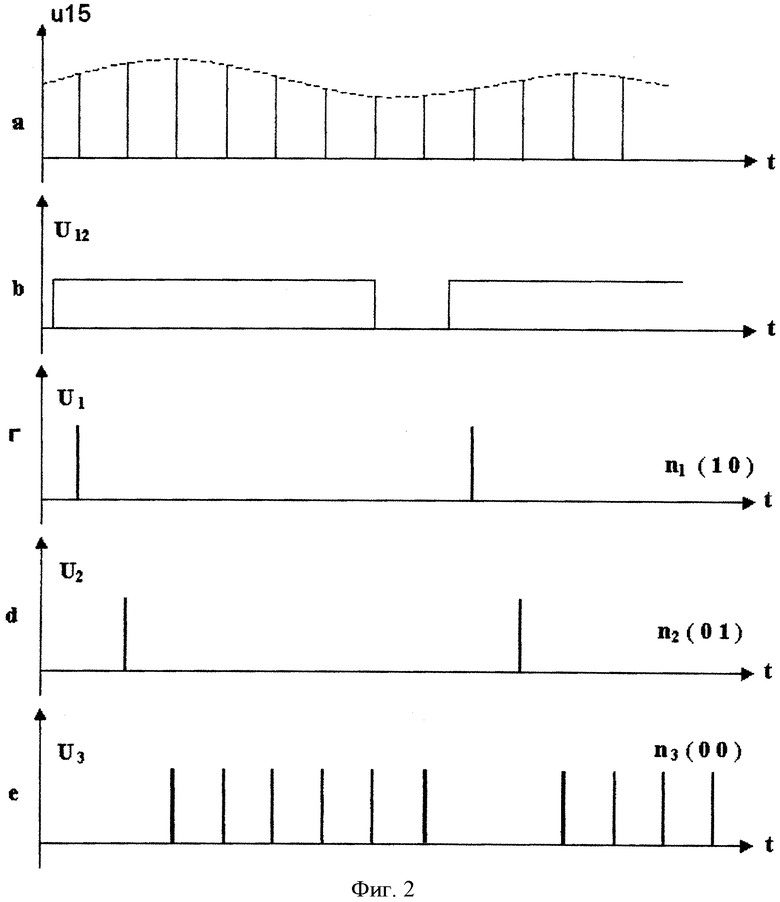
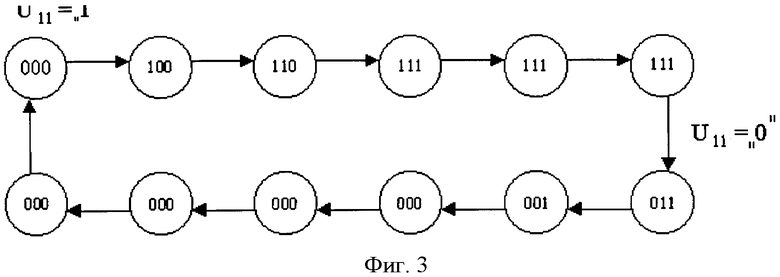
На фиг. 1 изображена функциональная схема компенсационного акселерометра, на фиг. 2 диаграммы, поясняющие принцип работ компенсационного акселерометра, на фиг. 3 граф работы трехразрядного сдвигового регистра в цифровом канале компенсационного акселерометра.
Компенсационный акселерометр содержит чувствительный элемент 1, выполненный в виде маятника, датчик угла 2, выход датчика угла соединен с входом усилителя 3, выход которого соединен с входом первого изодромного звена 4, выход которого соединен с входом второго изодромного звена 5. Выход второго изодромного звена 5 соединен с входом преобразователя напряжение-ток 6, а выход преобразователя напряжение-ток 6 соединен с входом датчика момента 7. Выход усилителя 3 соединен также с первым входом первого дискретизатора 8, первый выход которого соединен с первым входом сумматора 9. Выход сумматора 9 соединен с первым входом второго дискретизатора 10, выход второго дискретизатора 10 соединен с первым входом компаратора 11. Выход компаратора 11 соединен с первым входом трехразрядного сдвигового регистра 12, второй, третий и четвертый выходы которого соединены соответственно с первым, вторым и третьим входами реверсивного счетчика 13. Выход реверсивного счетчика 13 соединен с входом итогового регистра 14, другой вход которого соединен с первым выходом трехразрядного сдвигового регистра 12. Второй выход первого дискретизатора 8 соединен с входом схемы синхронизации 15, первый второй, третий и четвертый выходы которой соединены со вторыми входами первого дискретизатора 8, сумматора 9, второго дискретизатора 10 и компаратора 11. Пятый выход схемы синхронизации 15 соединен со вторым входом трехразрядного сдвигового регистра 12.
Внутреннее содержание дискретизатора, компаратора, итогового регистра, сумматора, трехразрядного сдвигового регистра, реверсивного счетчика описаны в книгах Майоров С.А., Новиков Г.И., Принципы организации цифровых машин. Л.: Машиностроение, 1974, 432 с., П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир., т. 1-3, 1999.
Компенсационный акселерометр работает следующим образом.
При действии ускорения на чувствительный элемент 1, выполненный в виде маятника, действует инерционный момент. Под действием этого момента происходит отклонение чувствительного элемента 1. Величина этого угла фиксируется датчиком угла 2, сигнал с которого в виде напряжения поступает на вход усилителя 3, а затем на вход первого изодромного звена 4. Сигнал с 4, в виде напряжения, поступает на вход второго изодромного звена 5. Изодромные звенья 4 и 5 обеспечивают не только устойчивость, но и астатизм по отклонению и по скорости. Сигнал с выхода второго изодромного звена 5 поступает на вход преобразователя напряжение-ток 6, сигнал с выхода которого в виде тока поступает на вход датчика момента 7, который развивает момент для компенсации инерционного момента, вызванного действием ускорения. Выходной сигнал с усилителя 3 служит оценкой величины действующего ускорения в аналоговой форме. Сигнал с выхода усилителя 3, в виде напряжения, поступает на первый вход первого дискретизатора 8, на второй вход которого поступает управляющий сигнал в виде импульсов с первого выхода схемы синхронизации 15. Первый дискретизатор 8 фиксирует величину аналогового сигнала с усилителя 3 на время преобразования. Напряжение на выходе первого дискретизатора 8, фиксируется с приходом каждого импульса со схемы синхронизации 15. Со второго выхода первого дискретизатора 8 сигнал поступает на вход схемы синхронизации 15 и используется для формирования знака поступающей информации, которая смещает сигнал параметрической компенсации в положительную или отрицательную область. Сумматор 9, на первый вход которого поступает сигнал в виде ступенчатого напряжения с первого выхода первого дискретизатора 8, а на второй вход сумматора 9 поступает со второго выхода схемы синхронизации 15 параметрический сигнал треугольной формы, складывает сигнал с выходов 8 и 15, смещаемый в зависимости от знака вверх или вниз. Сигнал с выхода сумматора 9 поступает на первый вход второго дискретизатора 10, на второй вход дискретизатора 10 поступает управляющий сигнал с третьего выхода схемы синхронизации 15. Второй дискретизатор 10 запоминает информацию с выхода сумматора 9 на время преобразования. Сигнал с выхода второго дискретизатора 10 поступает на первый вход компаратора 11, в котором происходит сравнение сигнала с выхода второго дискретизатора 10 в аналоговой форме с сигналом треугольной формы, выделенного из стабильного по частоте и амплитуде прямоугольного сигнала с четвертого выхода схемы синхронизации 15. Если сигнал с выхода второго дискретизатора 10 больше треугольного напряжения с выхода схемы синхронизации 15, то на выходе компаратора 11 будет высокий логический уровень, если меньше, то на выходе 11 будет низкий логический уровень. Сигнал с выхода компаратора 11 (фиг. 2б), в виде уровня, поступает на первый вход трехразрядного сдвигового регистра 12, на второй вход которого поступают тактовые импульсы с пятого выхода схемы синхронизации 15 (фиг. 2а). На первый вход реверсивного счетчика 13 поступают импульсы счета U3 (фиг. 2d) при состоянии счетчика 111, на второй вход 13 (фиг. 2е) импульсы U4 ″1″ при состоянии счетчика 011, 001, 000. На третий вход реверсивного счетчика 13 поступают импульсы установки счетчика 13 в начальное состояние ″+1″ (фиг. 2г) при состоянии счетчика 110. Запись этой информации осуществляется по импульсу записи информации U1 (фиг. 2b) при состоянии счетчика 100. Выход информации с итогового регистра 14 является выходом цифрового кода компенсационного акселерометра.
На фиг. 3 представлен граф работы трехразрядого сдвигового регистра 12 при переходе информации с компаратора 11 с высокого логического уровня на низкий (U11=″1″, U11=″0″).
Введение в цифровой канал трехразрядного сдвигового регистра, осуществляющего управление потоком входной информации, позволяет создавать устройство с расширенной полосой пропускания, значительным быстродействием. Расширение полосы и увеличение быстродействия обеспечивается с тем, что начальная установка реверсивного счетчика 13 не на ″0″, а на ″+1″. Применение последовательно соединенных изодромных звеньев 4 и 5 позволяет свести к нулю коэффициенты ошибок системы, а следовательно, повысить точность компенсационного акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2008 |
|
RU2363958C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190857C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190858C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2750531C1 |
| Акселерометр | 2017 |
|
RU2653140C1 |
| Устройство для измерения ускорений | 2020 |
|
RU2740875C1 |
| Компенсационный акселерометр | 2020 |
|
RU2738877C1 |
| ГИРОТАХОМЕТР | 2006 |
|
RU2325659C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478212C1 |
Изобретение относится к измерительной технике и предназначено для использования в приборах компенсационного типа с дискретным выходом в системах стабилизации, навигации и наведения. Компенсационный акселерометр содержит аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла, усилитель, а также соединенные последовательно преобразователь напряжение-ток и датчик момента и цифровой канал, включающий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, а также последовательно соединенные реверсивный счетчик и итоговый регистр, вторые входы первого дискретизатора, сумматора, второго дискретизатора и компаратора соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации, второй выход первого дискретизатора соединен с входом схемы синхронизации и выход итогового регистра является выходом цифрового кода, введены с выхода усилителя на вход преобразователя напряжение-ток последовательно соединенные между собой два изодромных звена, и выход усилителя соединен с входом первого дискретизатора. Технический результат - повышение точности измерения. 3 ил.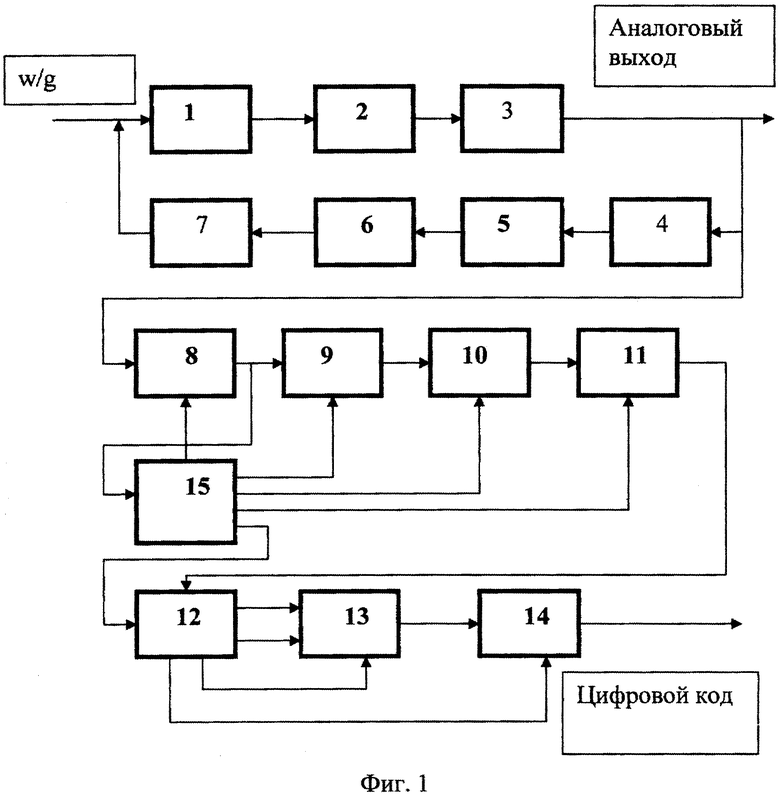
Компенсационный акселерометр, содержащий аналоговый канал, включающий последовательно соединенные чувствительный элемент, датчик угла, усилитель, а также соединенные последовательно преобразователь напряжение-ток и датчик момента и цифровой канал, включающий схему синхронизации и последовательно соединенные по информационным входам первый дискретизатор, сумматор, второй дискретизатор, компаратор, а также последовательно соединенные реверсивный счетчик и итоговый регистр, вторые входы первого дискретизатора, сумматора, второго дискретизатора и компаратора соединены соответственно с первым, вторым, третьим и четвертым выходами схемы синхронизации, второй выход первого дискретизатора соединен с входом схемы синхронизации и выход итогового регистра является выходом цифрового кода, отличающийся тем, что в него введены с выхода усилителя на вход преобразователя напряжение-ток последовательно соединенные между собой два изодромных звена, и выход усилителя соединен с входом первого дискретизатора.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2008 |
|
RU2363958C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2001 |
|
RU2190857C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| US 5597956 A1, 28.01.1997 | |||
| US 20050235751 A1, 27.10.2005. | |||

