Изобретение относится к измерительной технике, а именно, к прецизионным акселерометрам с компенсационным преобразованием для измерения линейных ускорений.
Известен компенсационный акселерометр, содержащий корпус, чувствительный элемент, датчик положения, подключенный к входу усилителя следящей системы, к выходу которого подключены компенсационная катушка магнитоэлектрического силового преобразователя и соединенный с ней масштабный резистор [3].
Недостатком такого акселерометра является постоянство разрешающей способности во всем диапазоне измеряемых ускорений, что ограничивает точность измерений на нижнем пределе измеряемых ускорений.
Возможностью изменения разрешающей способности в зависимости от измеряемого ускорения обладает компенсационный акселерометр, содержащий корпус, чувствительный элемент, датчик положения, магнитоэлектрический силовой преобразователь с постоянным магнитом и компенсационной катушкой, усилитель акселерометра, корректирующий фильтр с комплексным сопротивлением, масштабный регистр, причем датчик положения подключен к входу усилителя акселерометра, один вывод компенсационной катушки соединен с выводом масштабного резистора [1].
Недостатком такого компенсационного акселерометра является изменение полосы частот пропускания и динамической характеристики акселерометра при изменении коэффициента преобразования акселерометра путем изменения величины сопротивления масштабного резистора в зависимости от требований потребителя.
Целью изобретения является устранение влияния на динамические характеристики акселерометра изменения коэффициента преобразования акселерометра путем изменения сопротивления масштабного резистора.
Цель достигается в известном компенсационном акселерометре тем, что введены (m-1) масштабных резисторов и усилитель постоянного тока с n каскадами, все m масштабных резисторов соединены последовательно, вход корректирующего фильтра подключен к входу усилителя постоянного тока или одного из его каскадов, выход корректирующего фильтра подключен к точке соединения (m-1)-го масштабного резистора с m-ым масштабным резистором, вход усилителя постоянного тока с n каскадами соединен с выходом усилителя акселерометра, а его выход соединен с другим выводом компенсационной катушки, при этом суммарное сопротивление цепи из (m-1) масштабных резисторов выполнено большим или равным сопротивлению m-го масштабного резистора.
В развитие компенсационного акселерометра сопротивление RМm m-го масштабного резистора выполнено в соответствии с соотношением:
RМm=(UМ/IМ)-RКМ,
где
UМ - максимальное выходное напряжение усилителя постоянного тока;
IМ - максимальный ток нагрузки усилителя постоянного тока;
RКМ - максимальное сопротивление компенсационной катушки силового преобразователя.
Путем введения (m-1) масштабных резисторов и усилителя постоянного тока с n каскадами, соединения всех масштабных резисторов последовательно, подключения входа корректирующего фильтра к входу усилителя постоянного тока или одного из его каскадов, входа корректирующего фильтра к входу усилителя постоянного тока или одного из его каскадов, выхода корректирующего фильтра к точке соединения (m-1)-го и m-го масштабных резисторов, соединения входа усилителя постоянного тока с выходом усилителя акселерометра, а его выхода с другим выводом компенсационной катушки достигается неизменность функции преобразования следящей системы акселерометра, так как при неизменных функциях преобразования чувствительного элемента, датчика положения, усилителя акселерометра, корректирующего фильтра, силового преобразователя при изменении суммарного сопротивления цепи, состоящей из первых (m-1) масштабных резисторов, коэффициент преобразования k1 усилителя постоянного тока не изменяется вследствие того, что он определяется соотношением:
k1=Zф+RМm/Rвх1RМm, (1)
где
Zф - комплексное сопротивление корректирующего фильтра;
RМm - сопротивление m-го масштабного резистора;
Rвх.1 - сопротивление на входе усилителя постоянного тока.
Поэтому при изменении коэффициента преобразования акселерометра путем включения или выключения одного или нескольких первых (m-1) масштабных резисторов остаются неизменными динамические характеристики акселерометра, полоса его частот пропускания, сохраняется устойчивость следящей системы акселерометра.
При выполнении суммарного сопротивления цепи из последовательно соединенных масштабных резисторов, начиная с первого масштабного резистора и заканчивая (m-1)-ым масштабным резистором, большим или равным сопротивлению m-го масштабного резистора, обеспечивается многократное увеличение коэффициента преобразования акселерометра по сравнению с минимальным коэффициентом преобразования, определяемым величиной сопротивления m-го масштабного резистора.
Возможность применения компенсационного акселерометра в зависимости от требований потребителей к коэффициенту преобразования акселерометра достигается при выполнении сопротивления RМm m-го масштабного резистора в соответствии с соотношением:
RМm=(UМ/IМ)-RКМ, (2)
где
UМ - максимальное выходное напряжение усилителя постоянного тока;
IМ - максимальный ток нагрузки усилителя постоянного тока;
RКМ - максимальное сопротивление компенсационной катушки силового преобразователя.
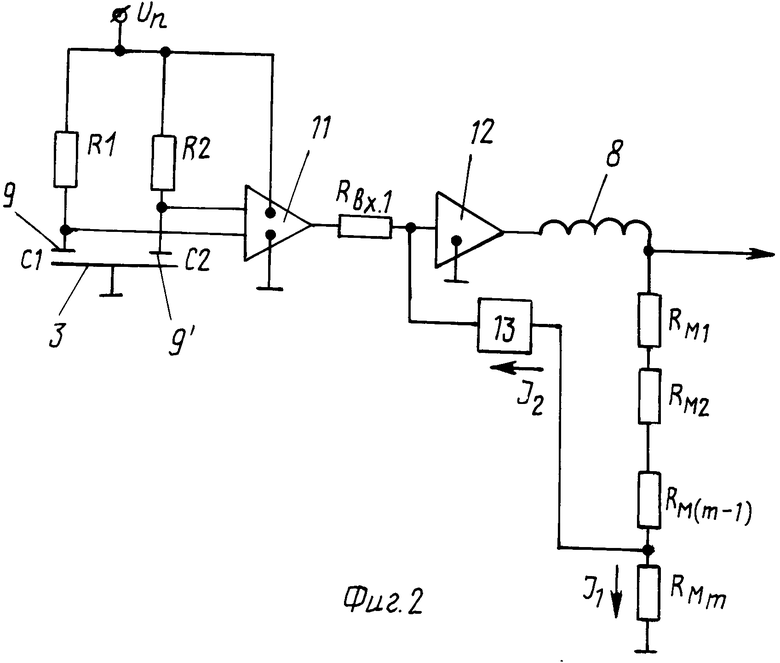
На фиг. 1 представлен общий вид компенсационного акселерометра; на фиг. 2 - электрическая схема компенсационного акселерометра.
Компенсационный акселерометр (фиг.1) содержит корпус 1, в котором установлен чувствительный элемент 2 с подвижной частью 3 и неподвижной частью 4, которые соединены между собой посредством упругого шарнира 5. На подвижной части 4 чувствительного элемента 2 установлен груз 6. Магнитоэлектрический силовой преобразователь содержит установленный в корпус 1 постоянный магнит 7 с диаметральным направлением намагничивания и компенсационную катушку 8 на подвижной части 3 чувствительного элемента 2. Неподвижные электроды 9, 9' емкостного датчика положения расположены на постоянном магните 7, а подвижный электрод выполнен в виде электропроводной поверхности подвижной части 3 чувствительного элемента 2. Чувствительный элемент 2 может быть подготовлен, например, из монокристаллического кремния методом анизотропного травления.
Акселерометр закрыт крышкой 10.
Датчик положения (фиг. 2) в компенсационном акселерометре выполнен по мостовой схеме и содержит конденсаторы С1, С2 и резисторы R1, R2. Конденсатор C1 образован неподвижным электродом 9 и электропроводной поверхностью подвижной части 3 чувствительного элемента 2. Конденсатор С2 образован неподвижным электродом 9' и электропроводной поверхностью подвижной части 3 чувствительного элемента 2. К одной диагонали мостовой схемы датчика положения подведено напряжение питания Uп от источника переменной ЭДС. Выход датчика положения соединен с входом усилителя 11 акселерометра, выход которого посредством резистора Rвх.1 соединен с входом усилителя постоянного тока с n каскадами. Один вывод компенсационной катушки 8 силового преобразователя подключен к выходу усилителя постоянного тока 12. Масштабные резисторы RМ1, RМ2. ..RМm соединены последовательно. Второй вывод компенсационной катушки 8 подсоединен к свободному выводу первого резистора RМ1. Вход корректирующего фильтра 13 соединен с входом усилителя постоянного тока 12, выход корректирующего фильтра 13 соединен с точкой соединения масштабного резистора RМ(m-1) с масштабным резистором RМm.
Суммарное сопротивление масштабных резисторов RМ1, RМ2... RМ(m-1) выполнено большим или равным сопротивлению масштабного резистора RМm.
Для выполнения требований к коэффициенту преобразования акселерометра всех возможных потребителей сопротивление масштабного резистора RМm выполнено в соответствии с соотношением (2).
Компенсационный акселерометр (фиг. 1,2) работает следующим образом. При наличии ускорения на груз 6 воздействует инерционная сила, которая вызывает угловое перемещение подвижной части 3 чувствительного элемента 2 относительно неподвижной части 4. Пусть направление ускорения таково, что нижняя часть подвижной части 3 чувствительного элемента 2 приближается к неподвижному электроду 9, а ее верхняя часть отдаляется от неподвижного электрода 9'. Тогда емкость конденсатора С1 увеличивается, емкость конденсатора С2 уменьшается, происходит разбаланс мостовой схемы датчика положения, и с выхода датчика положения на усилитель акселерометра 11 поступает переменный сигнал рассогласования следящей системы акселерометра. После его усиления и преобразования в сигнал постоянного тока в усилителе акселерометра 11 он усиливается по напряжению и мощности в усилителе постоянного тока 12 с n каскадами. Затем напряжение постоянного тока на выходе усилителя постоянного тока 12 преобразуется в постоянный ток посредством цепи, состоящей из последовательно включенных компенсационной катушки 8 и масштабных резисторов RМ1, RМ2,... RМm. Этот ток, проходя через компенсационную катушку 8 магнитоэлектрического силового преобразователя, создает магнитное поле, которое взаимодействует с магнитным полем постоянного магнита 7.
В результате в магнитоэлектрическом силовом преобразователе создается компенсационная сила, воздействие которой на подвижную часть 3 чувствительного элемента 2 уравновешивает воздействие инерционной силы. При этом подвижная часть 3 чувствительного элемента 2 возвращается в исходное положение.
Ток компенсационной катушки 8, проходя через масштабные резисторы RМ1, RМ2, . . .RМm, создает на них падение напряжения UМ, которое пропорционально измеряемому ускорению и является выходным сигналом акселерометра. Коэффициент преобразования акселерометра, определяемый отношением выходного напряжения акселерометра к измеряемому ускорению, может изменяться в зависимости от режима акселерометра и от требований потребителя путем включения или выключения одного или нескольких масштабных резисторов из числа RМ1, RМ2... RМ(m-1) масштабных резисторов.
При изменении нагрузки усилителя постоянного тока 12 путем изменения суммарного сопротивления масштабных резисторов RМ1, RМ2...RМ(m-1) коэффициент преобразования k1 усилителя постоянного тока 12 не изменяется, как следует из нижеприведенных соотношений.
Ток I2 через корректирующий фильтр 13 равен:
I2=I1RМm/Zф+RМm (3)
где
I1 - ток в масштабном резисторе RМm;
Zф - комплексное сопротивление корректирующего фильтра 13.
Отсюда
I1=I2(Zф+RМm)/RМm (4)
Входное напряжение U1 усилителя постоянного тока 12 определяется соотношением
U1=I2Rвх.1 (5)
где Rвх.1 - сопротивление на входе усилителя постоянного тока 12.
Коэффициент преобразования k1 усилителя постоянного тока 12 равен:
k1=I1/U1 (6)
Подставляя в (6) выражения (4), (5), получим:
k1=Zф+RМm/Rвх.1RМm (7)
Как следует из выражения (7), коэффициент преобразования усилителя постоянного тока 12 не зависит от величин сопротивлений масштабных резисторов RМ1, RМ2...RМ(m-1).
Так как функция преобразования подвижной части 3 чувствительного элемента 2, датчика положения, усилителя акселерометра 11, магнитоэлектрического силового преобразователя для данного типа акселерометра неизменны, а коэффициент преобразования усилителя постоянного тока 12 не зависит от суммарного сопротивления масштабных резисторов RМ1, RМ2...RМ(m-1), то передаточная функция следящей системы акселерометра остается неизменной при любом суммарном сопротивлении масштабных резисторов RМ1, RМ2...RМ(m-1). Поэтому при изменении коэффициента преобразования акселерометра путем изменения суммарного сопротивления масштабных резисторов RМ1, RМ2...RМ(m-1) сохраняются устойчивость акселерометра его динамические характеристики и полоса частот пропускания акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155965C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2210781C2 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2184937C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199754C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2128325C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1998 |
|
RU2140653C1 |
Изобретение обеспечивает устранение влияния на динамические характеристики акселерометра изменения коэффициента его преобразования путем изменения суммарного сопротивления масштабных резисторов. Вход корректирующего фильтра акселерометра подключен к входу усилителя постоянного тока или одного из его каскадов, выход корректирующего фильтра подключен к точке соединения (m - 1)-го масштабного резистора с m-ым масштабным резистором, суммарное сопротивление от первого до (m - 1)-го масштабных резистров выполнено большим или равным сопротивлению m-го масштабного резистора. 1 з.п.ф-лы, 2 ил.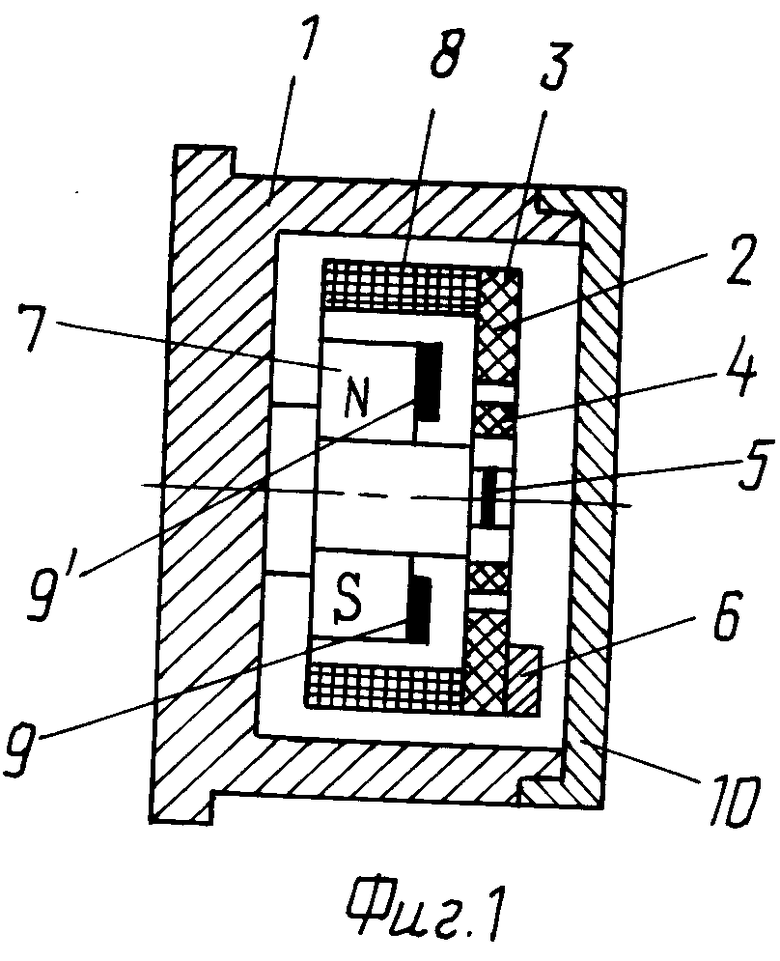
RM m = (UM/IM) - RK M,
где UM - максимальное выходное напряжение усилителя постоянного тока;
IM - максимальный ток нагрузки усилителя постоянного тока;
RK M - максимальное сопротивление компенсационной катушки силового преобразователя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1795374, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1728807, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент, 4507965, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| EP, заявка, 0386464, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
