Изобретение относится к подъемно-транспортирующим устройствам, используемым нреимущественно на подъемно-транспорт- , югрузочно-разгрузочных и складских работах с штучными грузами, выполняемых мостовыми кранами с использованием автоматических грузозахватных устройств.
Цель изобретения - повыпшние надежности и удобства эксплуатации.
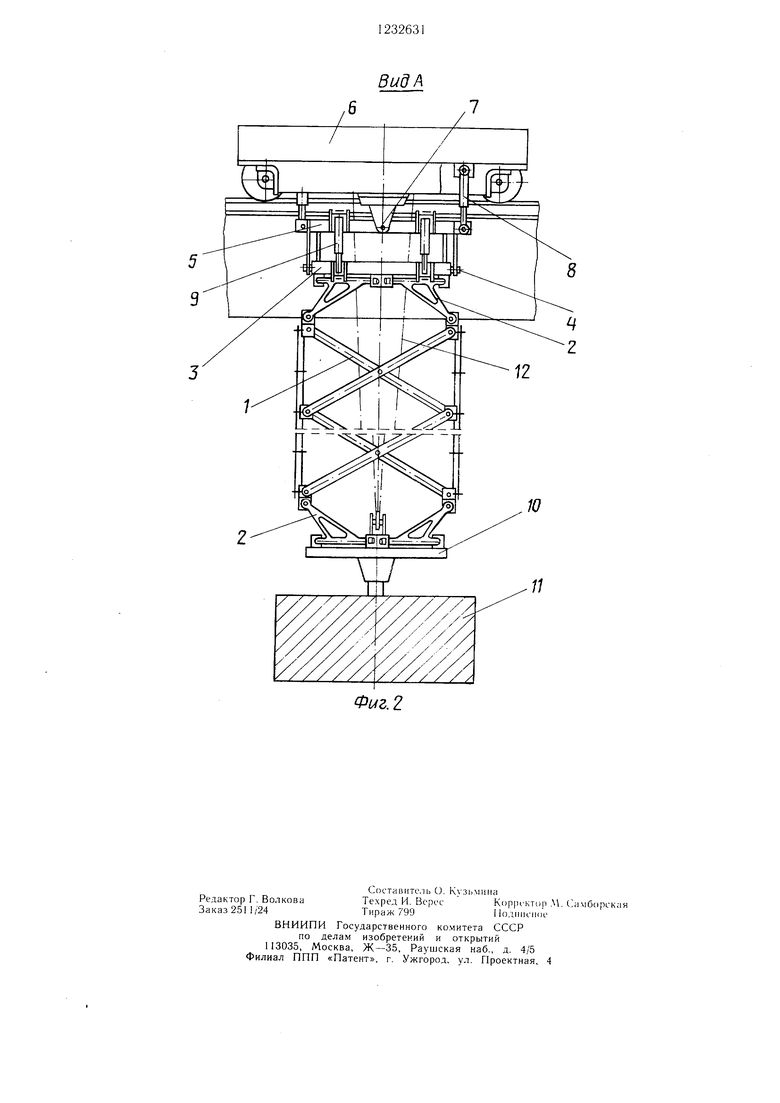
1а фиг.1 изображена грузовая подЕзеска крапа; на фиг.2 -- вид А на фиг.1.
Грузовая подвеска крана содержит про- страпствеппый шарнирно-рычажный механизм 1, птрпирно присоединяемый с помощью жестких треугольных элементов 2 к нижней горизонтальной раме 3, которая с помощью Hiapnnpa 4 прикреплена к верхней горизонтальной раме 5. Верхняя гори- зоптальпая рама 5 присоединяется к грузовой тележке 6 крапа с помопдью шарнира 7, продольная ось которого перпендикулярна продольной оси njapHHpa 4. Нижняя горизоп- тальная рама 3, верхняя горизонтальная рама 5 и п;арниры 4 и 7 составляют шар- пирную муфту. Между верхней горизонтальной рамой 5 и грузовой тележкой 6 крана размещены шарнирно соединенные с ними амортизаторы 8, а другие амортизаторы 9 размеп1ены между горизонтальными рамами 3 и 5 и П1арпирно соединены с ними. Верхняя горизонтальная рама 5 шарнирно связана с грузовой тележкой 6 крана с возможностью поворота вокруг горизонтальной оси, перпендикулярной горизонтальной оси поворота нижней горизонтальной рамы 3. Амортизаторы 8 и 9 могут быть выполнены гидравлическими, в частности могут быть ис- по.чьзованы гидравлические амортизаторы передпей подвески грузовых автомобилей.
К пижней части шарнирно-рычажного механизма 1 с помон;ью жестких треугольных элементов 2 п арнирно крепится плита 10 с грузовым захватом 11, подвешенным на канатах 12 механизма подъема тележки 6.
Грузовая подвеска крана работает еле- дуюп1им образом.
Под ьем и опускание грузового захвата 11 и груза производится канатами 12 ме- хапизма подъема тележки 6. При это.м njap- ппрно-рычажный механизм 1, жесткие тре- уго;1ьные э;1е.менты 2, горизонтальные ра.мы
3 и 5 на1 рузки от |-рузового захвата 1 I и груза, подвешенного на канатах 12, не вос- припимают, а восприпи.мают Hai-рузку только от горизонтальных сил инерции, возникающих при разгоне или замедлении крана или тележки 6 и силы контакта при наезде грузовым захватом 1 1 на неподвижное препятствие. При неремешении крана или тележки 6 с пебольн1ими ускорениями (замедлениями) горизонтальной силы инер- пии, приложенной к нижней части njapnnp- но-рычажного механизма 1, недостаточно, чтобы преодолеть сопротивление перемеше- пию нггоков амортизаторов 8 и 9 и повер- путь горизонтальные рамы 3 и 5 вокруг нарниров 4 и 7 и п арнирпо-рычажпый механизм 1 не отк;1оняется от вертикального положения. С увеличением ускорения (замедления) нри неремеп1.ении кра}1а или тележки 6 при столкновении крапов или наезде их на ограничите;1ьные упоры, а также при наезде грузовы.м захватом 11 па неподвижное Г1репятствие горизоптальпые силы инерции и cn:ia контакта с неподвижным пре- пятствие.м, приложенные к нижней части П1арнирно-рычажного механизма 1. возрастают и, преодолевая сопротивление перемещению HITOKOB амортизаторов 8 и 9, поворачивают горизонтальные рамы 3 и 5 вокруг 1парниров 4 и 7, позволяя шарпир)1о-рычаж- ному механизму 1 отклониться от вертикального положения. Отклонение шарнирпо-ры- чажпого механизма 1 от вертикального положения резко уменьп1ает нагрузку о: горизонтальных сил инерции и силы контакта с неподвижным препятствием, что обеспечивает устойчивость грузовой тележки б и умепь- паение массы шарнирно-рычажного .механизма 1. После остановки грузовой те.чежки 6 или крака раскачивание (ко.чебания) грузового захвата 11 и груза быстро затухают, так как перемещение HITOKOB амортизаторов 8 и 9 постоянно препятствуют этим раскачиваниям. При увеличепии жесткостг. амортизаторов 8 и 9 (коэффипиепт липей- ного сопротивления) пагрузка па Н1арнирно- рычажный механизм I возрастает и период .затухания раскачивания груза у.меньп1ается и паоборот. Следовательно, изменяя жесткость амортизаторов, .можно из.;енять нагрузку на шарнирно-рычажный механизм, а следовательно, ei o массу.
11
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовая подвеска крана | 1986 |
|
SU1399255A1 |
| Грузовая подвеска крана | 1985 |
|
SU1286497A1 |
| Грузовая подвеска крана | 1985 |
|
SU1335529A2 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1985 |
|
SU1377239A1 |
| УСТРОЙСТВО для ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗОВОЙ ПОДВЕСКИ КРАНА | 1972 |
|
SU347286A1 |
| Грузовая подвеска крана | 1987 |
|
SU1530563A2 |
| Грузовая подвеска крана | 1987 |
|
SU1532522A2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Кран | 1988 |
|
SU1523528A1 |
| Козловой кран | 1976 |
|
SU698907A1 |

| Грузовая подвеска крана | 1984 |
|
SU1177258A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
