Изобретение относится к мостостроению и может быть использовано для контроля деформаций опор при монтаже пролетных строений методом продольной надвижки.
Известен способ контроля деформаций опор моста при продольной надвижке пролетного строения, заключающийся в измерении углового перемещения вертикальной оси опоры посредством отвеса и отключения толкающей установки при превышении допустимого углового перемещения (источник информации: проект производства работ строительства моста через р. Томь на объездной дороге города Томска). Данным способом сложно обеспечить точность измерения, что обусловлено инерционностью отвеса и частыми ложными срабатываниями из-за его раскачивания.
Прототипом заявляемого способа является способ контроля деформации опор моста, заключающийся в том, что измеряют горизонтальное перемещение верха опоры относительно проволоки, натянутой между береговыми устоями, и отключают толкающую установку при превышении допустимого значения линейного перемещения верха опоры [экспресс-информация института "Оргтрансстрой". Совершенствование монтажа неразрезных железобетонных пролетных строений методом продольной надвижки (опыт строительства моста через р. Сок), М., 1977, с. 15]. Этим способом нельзя точно проконтролировать деформацию опоры, т.к. из-за влияния погодных условий, температурной деформации проволоки, ее провисания возникают погрешности в измерении. К тому же, чтобы реализовать этот способ, необходимо предварительно натянуть проволоку между береговыми устоями (через реку), а это сложно и трудоемко.
Известно устройство для автоматического отключения толкающей установки при предельно допустимой деформации опор моста, представляющее собой прикрепленный сбоку опоры отвес в виде подвешенного на гибком элементе груза, который находится в емкости с маслом, выполняющим роль демпфера; на грузе и емкости имеются контакты, замыкающие цепь катушки реле, отключающего привод толкающей установки при отклонении вертикальной оси опоры от первоначального положения (источник информации: проект производства работ строительства моста через р. Томь на объездной дороге города Томска). Недостаток такого устройства заключается в большой материалоемкости, трудоемкости изготовления, а также в инерционности маятника, что часто ведет к ложным срабатываниям устройства, не обеспечивая тем самым точность контроля за деформациями опоры.
Наиболее близкой к заявляемому устройству является схема автоматического контроля за деформацией опоры при продольной надвижке пролетного строения, содержащая механизм отключения привода толкающей установки, выполненный в виде высокопрочной проволоки, натянутой между береговыми устоями, и конечного выключателя, укрепленного на проволоке у опоры на расстоянии, равном предельно допустимому значению перемещения опоры, и соединенного с приводом толкающей установки [экспресс-информация института "Оргтрансстрой". Совершенствование монтажа неразрезных железобетонных пролетных строений методом продольной надвижки (опыт строительства моста через р. Сок), М., 1977, с. 15] . Если опора при надвижке пролетного строения деформируется, то при достижении предельно допустимого значения перемещения верха опоры она взаимодействует с выключателем, и привод отключается. Недостаток известного устройства заключается в большой трудоемкости изготовления, невозможности осуществления точного и надежного контроля за динамикой процесса деформации опоры, в погрешности из-за провисания, температурной деформации проволоки, ее колебаний как следствия влияния погодных условий.
Задача изобретения состоит в том, чтобы простым путем осуществить точный и надежный контроль за деформацией опоры и отключить толкающую установку при достижении предельно допустимого значения.
Задача решена следующим образом. По способу контроля за деформацией опоры при продольной надвижке пролетного строения моста, при котором устанавливают факт перемещения верха опоры и отключают привод толкающей пролетное строение установки при достижении величины линейного перемещения верха опоры предельно допустимого значения, согласно изобретению дополнительно измеряют величину линейного перемещения пролетного строения относительно берега и величину линейного перемещения относительно опоры, а факт перемещения верха опоры устанавливают, сравнивая вышеназванные величины линейного перемещения пролетного строения, причем величину линейного перемещения верха опоры определяют по формуле δ = (a-b), где δ - величина линейного перемещения верха опоры, a - величина линейного перемещения пролетного строения относительно берегового устоя, b - величина линейного перемещения пролетного строения относительно опоры.
Решение задачи заключается также в том, что в устройстве автоматического контроля деформаций опоры, содержащем механизм отключения привода толкающей установки при достижении величины линейного перемещения верха опоры предельно допустимого значения с выключателем привода, дополнительно имеются датчики перемещений, выполненные, например, в виде преобразователей линейных перемещений в число импульсов, и закрепленные один на берегу, другой - на опоре с возможностью взаимодействия с пролетным строением, а механизм отключения привода толкающей установки выполнен в виде блока сравнения перемещений пролетного строения относительно берега и относительно опоры, например, в виде реверсивного счетчика с заранее загруженным числом импульсов, соответствующим предельно допустимому значению перемещения верха опоры, выход окончания счета на уменьшение которого соединен с выключателем привода, вход на увеличение - с датчиком на опоре, а вход на уменьшение - с датчиком на берегу.
Таким образом, заявляемый способ отличается от прототипа тем, что:
- измеряют величину линейного перемещения пролетного строения относительно берега;
- измеряют величину линейного перемещения пролетного строения относительно опоры;
- факт перемещения опоры устанавливают, сравнивая вышеназванные величины;
- величину линейного перемещения верха опоры определяют по формуле δ = (a-b), где δ - величина линейного перемещения верха опоры, a - величина линейного перемещения пролетного строения относительно берега, b - величина линейного перемещения пролетного строения относительно опоры.
Заявляемое устройство отличается от известного тем, что:
- содержит датчик перемещения, измеряющие величины a и b (согласно способу);
- механизм отключения содержит блок сравнения величин a и b, реализованного, например, на базе реверсивного счетчика с заранее загруженным числом импульсов, соответствующим предельно допустимому перемещению опоры, причем его выход окончания счета на уменьшение соединен с выключателем привода толкающей установки, вход на уменьшение - с датчиком на берегу, а вход на увеличение - с датчиком на опоре.
Отличительные от прототипа признаки способа и устройства говорят о новизне заявляемых объектов изобретения.
Введенные датчики позволили измерить перемещения пролетного строения a и b, необходимые, согласно заявляемому способу, для определения величины линейного перемещения верха опоры δ, которое находится путем их сравнения с помощью другого отличительного признака - блока сравнения перемещения, выполненного на базе реверсивного счетчика (в случае использования датчиков, представляющих перемещения в виде количества импульсов). Счетчик при этом предварительно загружен числом импульсов, соответствующим предельному перемещению верха опоры, его вход на увеличение соединен с датчиком, установленным на опоре, а вход на уменьшение - с датчиком на берегу. Поэтому при неизменном положении верха опоры во время надвижки пролетное строение совершит одинаковое перемещение относительно опоры и берега, значит, датчики, взаимодействующие с пролетным строением, будут вырабатывать одинаковое количество импульсов, которые, поступая на входы счетчика, не будут менять число, загруженное в него первоначально. Но в случае перемещения верха опоры вместе с пролетным строением во время его надвижки расстояние, пройденное пролетным строением относительно берега, окажется большим расстояния, пройденного им же относительно опоры, ровно на величину перемещения опоры, значит, на вход на увеличение счетчика поступит меньше импульсов, чем на вход на уменьшение, и число, загруженное в счетчик, уменьшится на число импульсов, соответствующее перемещению верха опоры, и как только верх опоры сместится на предельно допустимую величину, которой соответствует число, предварительно загруженное в счетчик, на выходе окончания счета на уменьшение появится сигнал, используемый для управления выключателем привода толкающей установки.
Точность предложенного способа в отличие от прототипа зависит только от шага импульсов, вырабатываемых датчиками, поэтому в сравнении с прототипом она выше. Для того чтобы реализовать способ по прототипу, необходимо предварительно совершить ряд трудоемких операций (натянуть между береговыми устоями проволоку, укрепить на необходимом расстоянии выключатели привода). Заявляемый способ, реализуемый предложенным устройством, проще и надежнее.
К тому же в известных решениях контроль деформации опоры осуществляется непосредственно над контролируемой опорой, а в заявляемых объектах о деформации опоры судят по перемещению пролетного строения, т.е. предложен новый путь решения задачи.
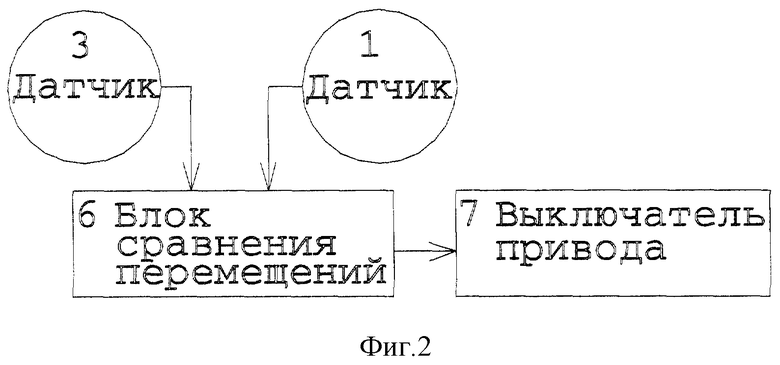
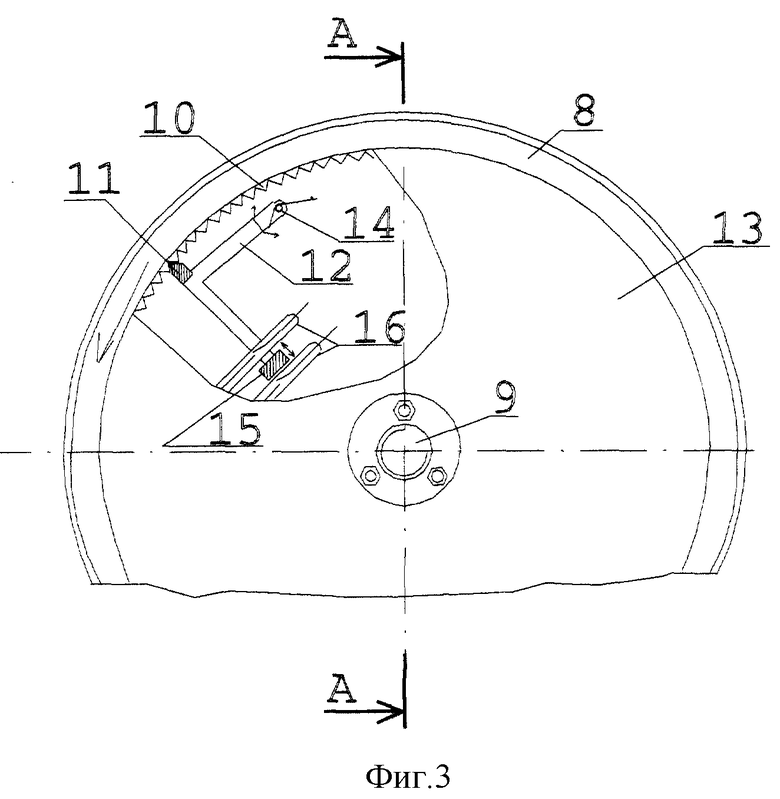
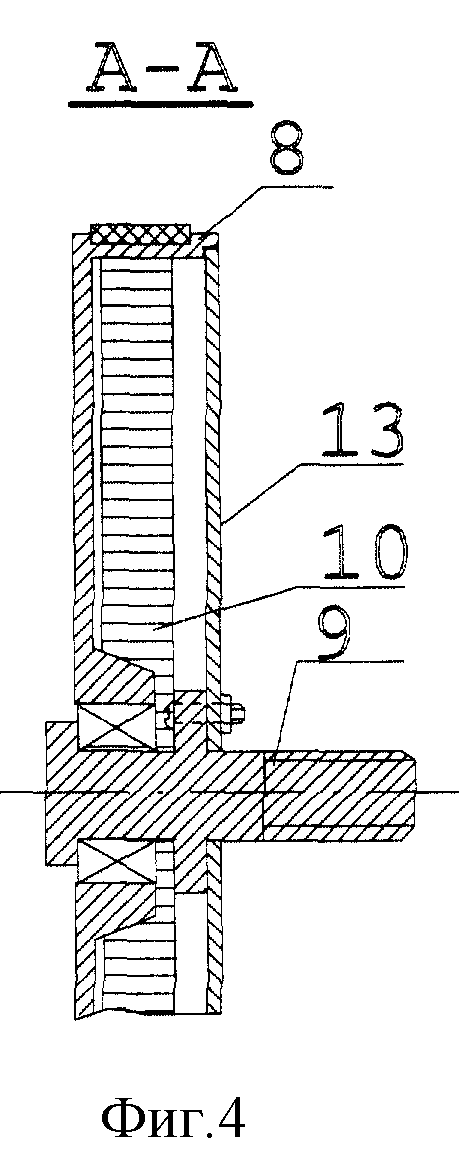
На фиг. 1 изображена схема установки датчиков; на фиг. 2 - блок-схема устройства автоматического отключения толкающей установки; на фиг. 3 - один из вариантов выполнения датчика перемещения; на фиг. 4 - разрез А-А по фиг. 3.
Устройство (фиг. 1) содержит датчик 1, установленный на берегу 2, датчик 3, установленный на опоре 4. Датчики 1, 3 закреплены с возможностью взаимодействия с пролетным строением 5. Датчики соединены с входами блока сравнения перемещений 6 (фиг. 2), выход которого соединен с выключателем привода 7 толкающей установки.
Заявителем предложен один из вариантов исполнения датчика перемещений (фиг. 3). Предложенный датчик содержит обрезиненное по ободу колесо 8, имеющее возможность вращаться на оси 9, по окружности которого расположены зубцы 10, способные воздействовать посредством кулачка 11 на подпружиненный рычаг 12, закрепленный на диске 13 с помощью оси 14. Диск 13 закреплен неподвижно на оси 9. К рычагу 12 прикреплен также постоянный магнит 15 с возможностью воздействия его на герконы 16, закрепленные на диске 13.
Блок сравнения 6 выполнен на базе реверсивного счетчика, вход счета на увеличение которого соединен с датчиком 3, установленным на опоре моста, а вход счета на уменьшение соединен с датчиком 1, установленным на берегу. Кроме того, возможно соединение одного из входов счетчика с выходом генератора импульсов для загрузки в счетчик разности перемещений, равной предельно допустимому значению перемещения верха опоры. Выход блока сравнения 6 соединен с выключателем 7 привода толкающей установки.
Возможны и другие варианты исполнения блока сравнения, например, на базе шаговых искателей.
Заявляемый способ реализуется устройством следующим образом. Перед началом осуществления надвижки на опоре и на берегу устанавливают датчики перемещения 1 и 3 и соединяют с блоком сравнения перемещений 6, выход которого соединяют с выключателем привода толкающей установки 7. Во время надвижки пролетного строения 5 датчики 1, 3 преобразуют его линейное перемещение в число импульсов благодаря попеременному замыканию параллельно включенных герконов 16 под действием поля постоянного магнита 15, который закреплен на подпружиненном рычаге 12, и вместе с ним при вращении колеса 8 приводится в движении зубцами 10 посредством воздействия их на кулачок 11, закрепленный на том же рычаге 12. Таким образом, измеряют линейные перемещения пролетного строения 5 относительно опоры 4 и берега 2. Далее импульсы, вырабатываемые датчиками, поступают на входы блока сравнения перемещений 6, выполненного на базе реверсивного счетчика, причем импульсы от датчика 1, установленного на берегу, поступают на вход счетчика CD (счет на уменьшение), а импульсы от датчика 3, установленного на опоре 4, - на вход счетчика CU (счет на увеличение). Кроме того, в счетчик до начала надвижки загружается, например, от генератора импульсов, число, соответствующее предельной величине линейного перемещения верха контролирующей опоры. Во время надвижки происходит автоматическое сравнение величин линейных перемещений пролетного строения, преобразованных в импульсы. При неизменном положении верха опоры во время надвижки пролетное строение переместится относительно берега на ту же величину, что и относительно верха опоры, значит, от обоих датчиков на входы CU и CD счетчика поступит одинаковое количество импульсов, и число, загруженное в счетчик первоначально, останется тем же. Но если при надвижке опора деформируется, пролетное строение переместится относительно ее верха на меньшую величину, чем относительно берега. Соответственно на вход CD счетчика поступит больше импульсов, чем на вход CU, и число, загруженное в счетчик, уменьшится. Когда верх опоры переместится от своего нормального положения на предельную величину, число, загруженное в счетчик, уменьшится до нуля, и на выходе счетчика появится сигнал, используемый для управления выключателем 7, в качестве которого может быть использовано электромагнитное реле. Таким образом, при достижении величиной линейного перемещения верха опоры ее предельно допустимого значения привод толкающей установки отключают.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИКЛИЧНОЙ ПРОДОЛЬНОЙ НАДВИЖКИ НЕРАЗРЕЗНОГО ЖЕЛЕЗОБЕТОННОГО ПРОЛЕТНОГО СТРОЕНИЯ МОСТА | 2004 |
|
RU2242559C1 |
| Способ монтажа сборного из блоков пролетного строения моста и устройство для его осуществления | 1985 |
|
SU1307008A1 |
| ДЕФОРМАЦИОННЫЙ ШОВ МОСТА | 1993 |
|
RU2057837C1 |
| Толкающее устройство для продольной надвижки пролетного строения моста | 1979 |
|
SU876830A1 |
| ТОЛКАЮЩЕЕ УСТРОЙСТВО МОСТОВЫХ КОНСТРУКЦИЙ | 2006 |
|
RU2318949C1 |
| Способ монтажа сборного из блоков пролетного строения моста | 1987 |
|
SU1470844A1 |
| Устройство для надвижки пролетного строения моста | 1983 |
|
SU1101496A1 |
| Сборно-разборное пролетное строение | 2023 |
|
RU2814086C1 |
| Способ определения коэффициента трения в опорных частях зданий и сооружений | 2022 |
|
RU2799291C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ ОДИНОЧНОЙ ПОДВИЖНОЙ НАГРУЗКИ НА ПРОЕЗЖУЮ ЧАСТЬ АВТОДОРОЖНЫХ МОСТОВ | 2010 |
|
RU2529669C2 |
Изобретение может быть использовано при монтаже пролетных строений мостов методом продольной надвижки для контроля деформаций опоры. С помощью датчиков перемещений, один из которых установлен на контролируемой опоре, другой - на берегу и находится во взаимодействии с пролетным строением, измеряют перемещения пролетного строения относительно берега и относительно контролируемой опоры. Импульсы, количество которых соответствует величине линейного перемещения пролетного строения, поступают на выходы блока сравнения, выполненного в виде реверсивного счетчика и предварительно загруженного числом импульсов, соответствующим предельно допустимому значению линейного перемещения опоры. Вход счетчика на увеличение соединен с датчиком на опоре, вход на уменьшение соединен с датчиком на берегу. Если опора не деформируется, то на входы счетчика будет поступать одинаковое количество импульсов, а число импульсов, которым предварительно загружен счетчик, не изменится. Если опора начнет двигаться вместе с пролетным строением (будет деформироваться), то с датчика, установленного на опоре, будет поступать меньшее количество импульсов, и загруженное в счетчик число импульсов по уменьшению. И если оно уменьшится до нуля, что соответствует предельно допустимой деформации опоры, то на выключатель подается сигнал, и привод толкающей установки отключается. Технический результат, обеспечиваемый изобретением, состоит в обеспечении простым путем точного и надежного контроля за деформацией опоры и своевременного отключения толкающей установки. 2 с.п. ф-лы, 4 ил.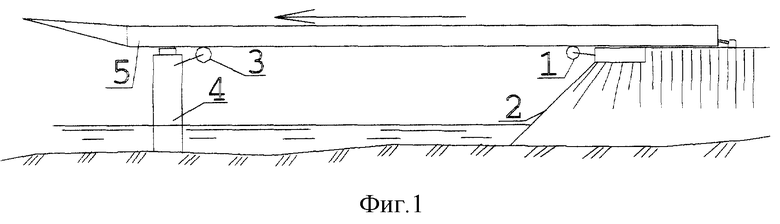
δ = (a-b),
где δ - величина линейного перемещения верха опоры;
a - величина линейного перемещения пролетного строения относительно берега;
b - величина линейного перемещения пролетного строения относительно верха опоры.
| Совершенствование монтажа неразрезных железобетонных пролетных строений методом продольной надвижки (опыт строительства моста через р | |||
| Сок), Экспресс-информация | |||
| - М.: Оргтрансстрой, 1977, с.15 | |||
| Устройство для передвижки | 1977 |
|
SU706482A1 |
| Устройство для контроля и регулирования давления от надвигаемого пролетного строения на накаточные опоры | 1979 |
|
SU872626A1 |
| ФЕЛЬДМАН М.В | |||
| и др | |||
| Опыт продольной надвижки неразрезных железобетонных пролетных строений, Экспресс-информация | |||
| - М.: Оргтрансстрой, 1973, с.22, 23, рис.10.БАРЕНБОЙМ И.Ю., КАРАСИК М.Е | |||
| Строительство железобетонных мостов | |||
| - Киев: Издательство "Будивельник", 1971, с.206-229. | |||

