Изобретение относится к машиностроению и может быть использовано на сельскохозяйственных тракторах.
Наиболее близкой к заявленной системе рулевого управления является система рулевого управления транспортного средства со всеми управляемыми колесами [1], содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом; рулевую трапецию задних управляемых колес с гидравлическим приводом, продольную тягу, кинематически связывающую рулевую трапецию передних колес с гидравлическим приводом задних колес; механизм изменения положения точки присоединения передней поперечной тяги к рулевой трапеции передних колес.
Недостатком данной конструкции является то, что она не позволяет осуществить устойчивое движение трактора при повороте передними колесами, что особенно проявляется при входе в поворот.
Изобретение решает задачу повышения устойчивости движения трактора при повороте за счет устранения бокового скольжения и заноса, равномерного распределения вертикальных нагрузок по колесам.
Это достигается тем, что в системе рулевого управления транспортного средства со всеми управляемыми колесами, содержащей рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом и последовательно установленными шарнирно соединенными между собой продольной тягой и кинематической связью с гидравлическим приводом поворота задних управляемых колес, который соединен с рулевой трапецией задних управляемых колес, и механизм изменения положения точки присоединения шарнира передней поперечной тяги к рулевой трапеции передних управляемых колес, включающий жестко связанную с рулевой трапецией передних управляемых колес направляющую, в которой установлен с возможностью перемещения посредством исполнительного гидроцилиндра от гидрораспределителя шарнир крепления поперечной тяги, образованной тросом с жесткими наконечниками, установленным в гибком кожухе, согласно изобретению рулевая трапеция передних управляемых колес снабжена двумя жестко связанными с ней рычагами, установленными на расстоянии друг от друга с возможностью воздействия на двуплечий рычаг и дополнительную поперечную тягу, связанную с золотником гидрораспределителя механизма изменения положения точки присоединения шарнира передней поперечной тяги к рулевой трапеции передних управляемых колес.
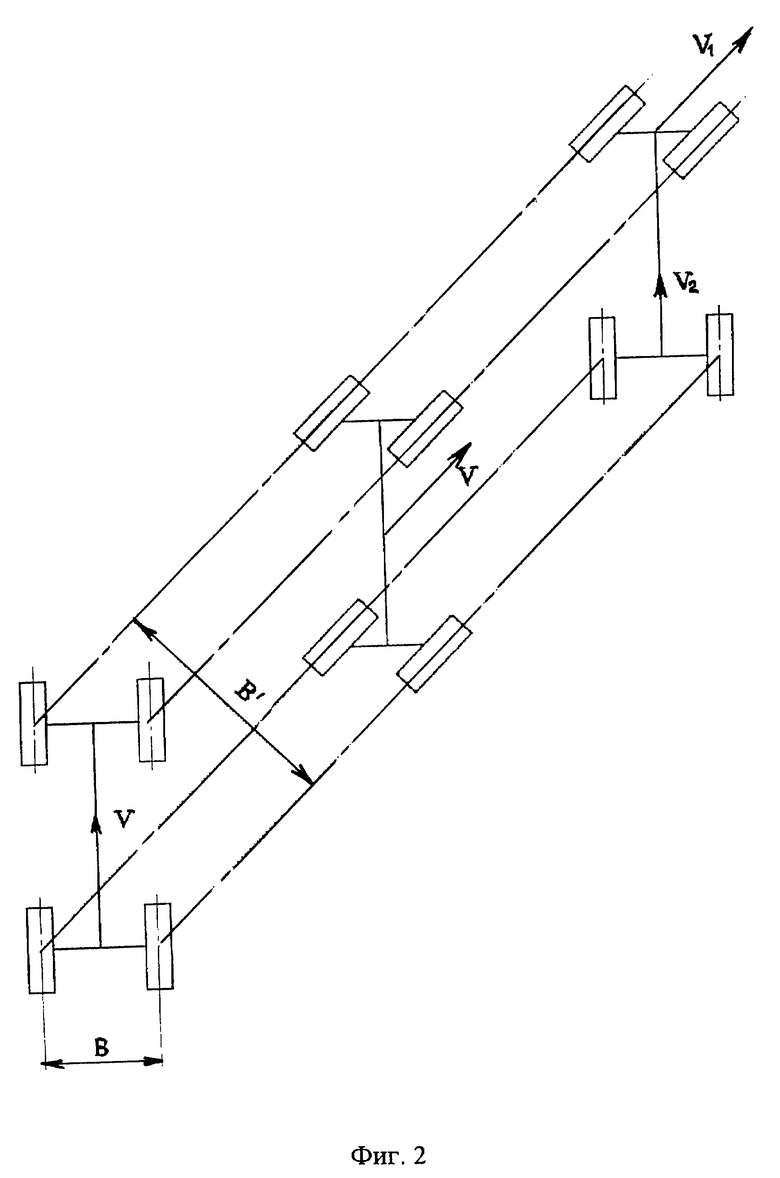
На фиг. 1 представлена предлагаемая система рулевого управления со всеми управляемыми колесами; на фиг.2 - схема поворота осуществляемого предлагаемой системой рулевого управления.
Система рулевого управления транспортного средства содержит гидравлический привод управления передними управляемыми колесами, состоящий из рулевого механизма 1, гидронасоса 2, гидробака 3 рабочей жидкости, исполнительного гидроцилиндра 4, рулевой трапеции 5 передних управляемых колес; гидравлический привод управления задними управляемыми колесами, состоящий из гидронасоса 6, гидробака 7 рабочей жидкости, гидрораспределителя 8, исполнительного гидроцилиндра 9, устройства 10 для автоматического возврата задних управляемых колес в нейтральное положение, рулевой трапеции 11 задних управляемых колес.
Рулевая трапеция 5 передних управляемых колес посредством передней поперечной тяги 12, выполненной в виде гибкого тросика с жесткими наконечниками, помещенного без зазора в кожухе с неподвижными направляющими концами, а также посредством продольной 13 и задней поперечной 14 тяг, двуплечих рычагов 15 и 16 кинематически связана с золотником 17 гидрораспределителя 8. Передняя поперечная тяга 12 связана с механизмом 18, предназначенным для изменения положения точки присоединения ее шарнира к рулевой трапеции 5 передних управляемых колес через исполнительный гидроцилиндр 19. Механизм 18 включает в себя исполнительный гидроцилиндр 19, гидрораспределитель 20 механизма изменения положения точки присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес, гидронасос 21, гидробак 22 рабочей жидкости, направляющую 23, жестко связанную с рулевой трапецией 5 передних управляемых колес.
Механизм управления передними управляемыми колесами дополнительно содержит устройство для автоматического возврата точки присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес в нейтральное положение при достижении передними управляемыми колесами максимального угла поворота. Данное устройство состоит из рычагов 24 и 25, жестко соединенных с направляющей 23, а следовательно, и с рулевой трапецией 5 передних управляемых колес, двуплечего рычага 26 и дополнительной поперечной тяги 27, связанной с золотником 28 гидрораспределителя 20 механизма изменения положения точки присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес, пружины 29 и рычага 30, жестко связанного со штоком гидроцилиндра 19.
Работает данная система рулевого управления следующем образом. При движении трактора по прямолинейной траектории в междурядьях пропашных культур точка присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес находится в нейтральном положении - в положении I. При этом при повороте передних управляемых колес на некоторый угол передняя поперечная тяга 12, кинематически связанная с рулевой трапецией 5 передних управляемых колес, остается неподвижной, следовательно, сигнала на золотник 17 гидрораспределителя 8 не поступает, задние колеса остаются в нейтральном положении, то есть управление осуществляется передними управляемыми колесами.
Перед совершением поворота на поворотной полосе на шток исполнительного гидроцилиндра 19 передается сигнал от гидрораспределителя 20 механизма изменения положения точки присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес. Шток исполнительного гидроцилиндра 19 совместно с шарниром передней поперечной тяги 12 перемещается по направляющей 23 в положение II. Один из направляющих концов кожуха тросика передней поперечной тяги 12 совместно со штоком исполнительного гидроцилиндра 19 перемещается также в положение II. При этом при повороте передних управляемых колес передняя поперечная тяга 12, кинематически связанная с рулевой трапецией 5 передних управляемых колес через направляющую 23? перемещается вправо или влево, воздействуя посредством продольной тяги 13, задней поперечной тяги 14 и двуплечих рычагов 15 и 16 на золотник 17 гидрораспределителя 8, который передает сигнал исполнительному гидроцилиндру 9, поворачивающему через рулевую трапецию 11 задних управляемых колес задние колеса в ту или иную сторону, совпадающую с направлением поворота передних управляемых колес, то есть движение происходит "крабом". При достижении передними управляемыми колесами максимального угла поворота устраняется зазор "а" между рычагами 24 и 26 или рычагами 25 и 26. И в зависимости от направления поворота передних управляемых колес (влево или вправо) рычаг 24 или 25 воздействует на рычаг 26, который перемещает дополнительную поперечную тягу 27, связанную с золотником 28 гидрораспределителя 20 механизма изменения положения точки присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес, который создает в полостях исполнительного гидроцилиндра 19 равные давления.
Пружина 29 через рычаг 30, жестко связанный со штоком исполнительного гидроцилиндра 19, мгновенно перемещает его в направляющей 23, жестко связанной с рулевой трапецией 5 передних управляемых колес.
Совместно со штоком исполнительного гидроцилиндра 19 перемещается связанный с ним один из направляющих концов кожуха тросика передней поперечной тяги 12. Шток исполнительного гидроцилиндра 19 совместно с шарниром крепления передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес занимает положение I.
При этом передняя поперечная тяга 12, кинематически связанная с рулевой трапецией 5 передних управляемых колес через направляющую 23, воздействует посредством продольной тяги 13, задней поперечной тяги 14 и двуплечих рычагов 15 и 16 на золотник 17 гидрораспределителя 8, который передает сигнал через устройство 10 автоматического возврата задних управляемых колес в нейтральное положение исполнительному гидроцилиндру 9, мгновенно поворачивающему через рулевую трапецию 11 задних управляемых колес задние колеса в нейтральное положение. Дальнейший поворот происходит передними управляемыми колесами.
Таким образом, при совершении кругового поворота с целью улучшения устойчивости движения на участке "вход в поворот" осуществляется синхронный поворот передних и задних колес относительно остова в одну сторону, то есть происходит движение "крабом". Это, в отличие от поворота передними управляемыми колесами, позволяет устранить боковое скольжение и занос агрегата, равномерно распределить нагрузки по колеса трактора на самом динамически нагруженном участке поворота. При достижении передними управляемыми колесами максимального угла поворота задние колеса автоматически возвращаются в нейтральное положение и в дальнейшем поворот осуществляется передними управляемыми колесами.
Следовательно, предлагаемая система рулевого управления позволит улучшить устойчивость движения трактора при его повороте.
Источники информации
1. Патент РФ N 2013269, В 62 D 7/14, 30.05.94, БИ N 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2003 |
|
RU2240943C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1991 |
|
RU2013269C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2004 |
|
RU2277488C1 |
| ПЕРЕДВИЖНАЯ ЭСТАКАДА | 1999 |
|
RU2184070C2 |
| ГИДРООБЪЕМНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180633C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ КОЛЕСНОГО ТРАКТОРА С ДВУХОСНЫМ ПРИЦЕПОМ | 2010 |
|
RU2456194C2 |
| МЕХАНИЗМ ЗАДНЕГО КОЛЕСА ПОЛУНАВЕСНОГО ОРУДИЯ | 2005 |
|
RU2288557C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАВНИВАНИЯ КУЧ И ФОРМИРОВАНИЯ ВАЛКОВ ОРГАНИЧЕСКИХ УДОБРЕНИЙ | 2003 |
|
RU2239972C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ БАЛЛАСТНОГО ГРУЗА НА ПОЛУРАМЕ ТРАКТОРА | 2011 |
|
RU2469523C1 |
| ПЕРЕДВИЖНОЙ ПЕРЕГРУЗЧИК ДЛЯ ЗЕРНА СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2009 |
|
RU2400963C1 |
Изобретение относится к машиностроению и может быть использовано на сельскохозяйственных тракторах. Система рулевого управления транспортного средства со всеми управляемыми колесами содержит рулевую трапецию передних управляемых колес, связанную с рулевым механизмом, рулевую трапецию задних управляемых колес с гидравлическим приводом, продольную тягу, кинематически связывающую рулевую трапецию передних колес с гидравлическим приводом задних колес. Рулевая трапеция передних колес имеет направляющую, через которую связана с механизмом изменения положения точки присоединения передней поперечной тяги к рулевой трапеции передних колес. Рулевая трапеция передних управляемых колес снабжена двумя жестко связанными с ней рычагами, установленными на расстоянии друг от друга с возможностью воздействия на двуплечий рычаг и тягу, связанную с золотником гидрораспределителя. Технический результат заключается в повышении устойчивости движения трактора при повороте. 2 ил.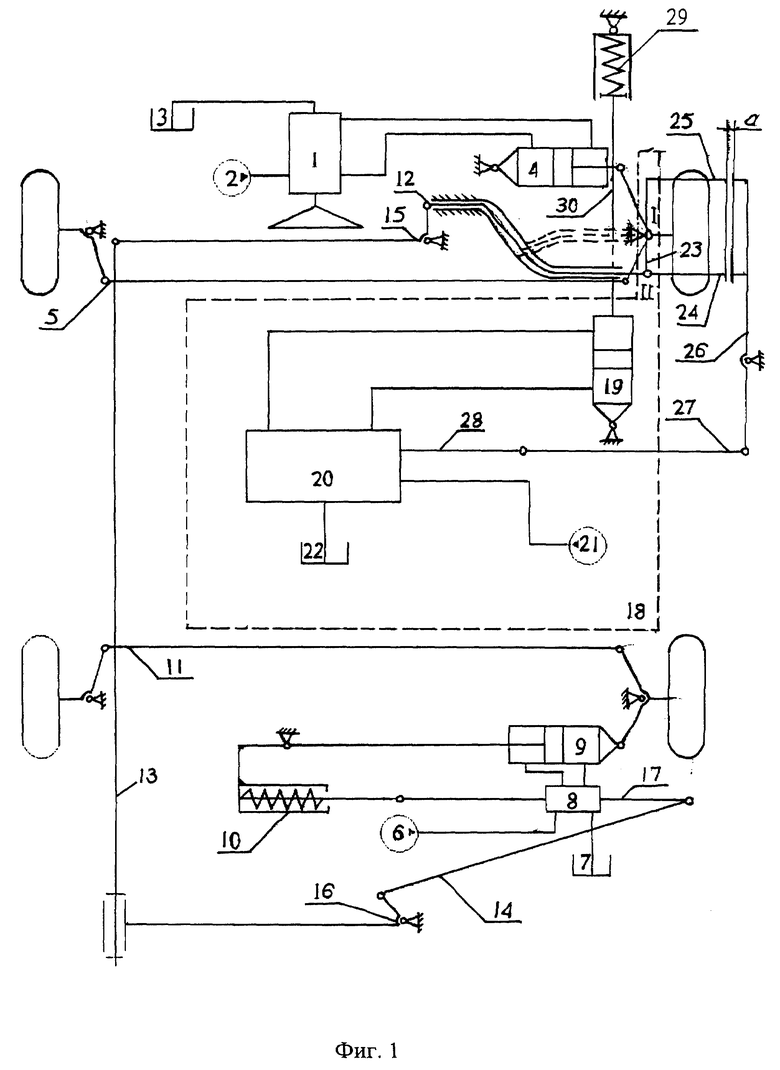
Система рулевого управления транспортного средства со всеми управляемыми колесами, содержащая рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом и последовательно установленными шарнирно соединенными между собой продольной тягой и кинематической связью с гидравлическим приводом поворота задних управляемых колес, который соединен с рулевой трапецией задних управляемых колес, и механизм изменения положения точки присоединения шарнира передней поперечной тяги к рулевой трапеции передних управляемых колес, включающий жестко связанную с рулевой трапецией передних управляемых колес направляющую, в которой установлен с возможностью перемещения посредством исполнительного гидроцилиндра от гидрораспределителя шарнир крепления поперечной тяги, образованной тросом с жесткими наконечниками, установленным в гибком кожухе, отличающаяся тем, что рулевая трапеция передних управляемых колес снабжена двумя жестко связанными с ней рычагами, установленными на расстоянии друг от друга с возможностью воздействия на двуплечий рычаг и дополнительную поперечную тягу, связанную с золотником гидрораспределителя механизма изменения положения точки присоединения шарнира передней поперечной тяги к рулевой трапеции передних управляемых колес.
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1991 |
|
RU2013269C1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| ИМИТАТОР ЭМУЛЬСИОННЫХ ПЕСТИЦИДОВ илиГЕРБИЦИДОВ | 0 |
|
SU287463A1 |
| ПРИВОД ДЛЯ ПРИВОДНОГО УСТРОЙСТВА И СПОСОБ ЕГО МОНТАЖА | 2013 |
|
RU2636031C2 |
