Изобретение относится к машиностроению и может быть использовано на сельскохозяйственных тракторах.
Известна система рулевого управления транспортного средства со всеми управляемыми колесами [Патент РФ №2013269, В 62 D 7/14, 30.05.94, БИ №10.], содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом; рулевую трапецию задних управляемых колес с гидравлическим приводом, продольную тягу, кинематически связывающую рулевую трапецию передних колес с гидравлическим приводом задних колес, механизм изменения положения точки присоединения передней поперечной тяги к рулевой трапеции передних колес.
Недостатком данной конструкции является то, что она не позволяет осуществить устойчивое движение трактора при повороте передними колесами, что особенно проявляется при входе в поворот.
Наиболее близкой к заявленной системе рулевого управления является система рулевого управления транспортного средства со всеми управляемыми колесами [Патент РФ №2164211, В 62 D 7/14, 20.03.2001, БИ №8], содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом; рулевую трапецию задних управляемых колес с гидравлическим приводом; механизм изменения положения точки присоединения передней поперечной тяги к рулевой трапеции передних колес; жесткие рычаги, связанные с рулевой трапецией передних управляемых колес; двуплечий рычаг и дополнительную поперечную тягу.
Недостатком данной конструкции является то, что сигнал на гидравлический привод поворота задних управляемых колес передается от передних управляемых колес, через механические и гидравлические связи, что приводит к его запаздыванию и то, что сигнал на задние колеса передается только при максимальном угле поворота передних управляемых колес, что не позволяет реализовать различные способы движения транспортного средства при повороте.
Изобретение решает задачу повышения устойчивости движения и маневренности трактора применением различных способов поворота задних колес.
Это достигается тем, что в системе рулевого управления транспортного средства со всеми управляемыми колесами, содержащей рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом, рулевую трапецию задних управляемых колес с гидравлическим приводом задних управляемых колес, связанным через преобразователи углового положения валов в цифровой код с валом рулевого колеса, согласно изобретению, гидравлический привод управления задними колесами имеет зубчатый сектор, связанный с рулевой трапецией задних управляемых колес, вал-винт с поршнем-рейкой и золотник с реактивными плунжерами, а сигнал от рулевого колеса на задние управляемые колеса передается через цифровой узел кодирования угла поворота.
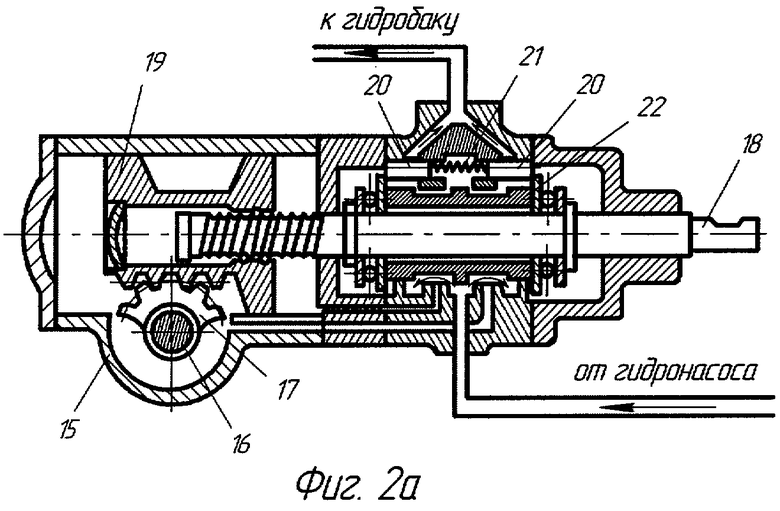
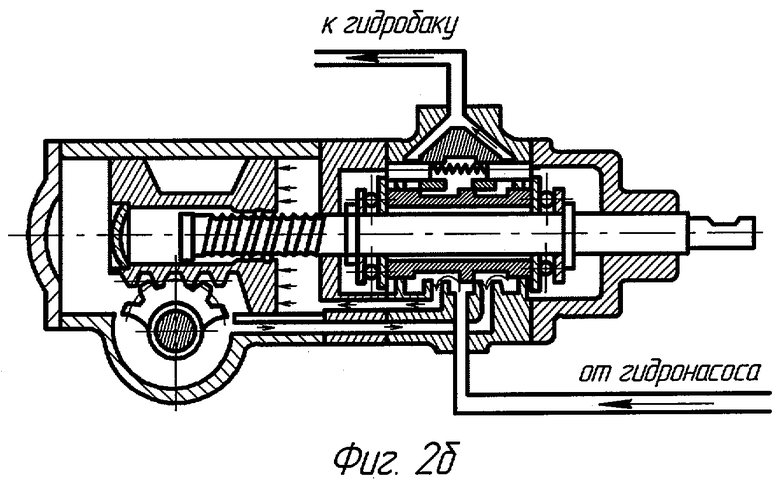
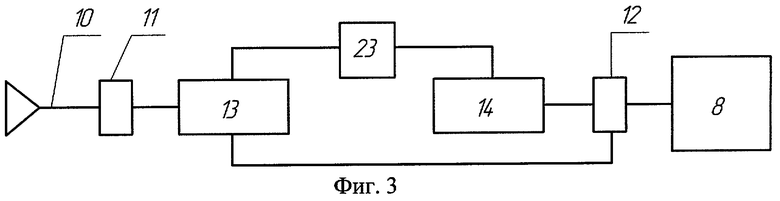
На фиг.1 представлена предлагаемая система рулевого управления со всеми управляемыми колесами; на фиг.2а - рулевой механизм задних управляемых колес с золотником в нейтральном положении; на фиг.2б - рулевой механизм задних управляемых колес с золотником в правом положении; на фиг.2в - рулевой механизм задних управляемых колес с золотником в левом положении; на фиг.3 - блок-схема узла кодирования угла поворота.
Система рулевого управления транспортного средства содержит гидравлический привод управления передними управляемыми колесами, состоящий из рулевого механизма 1, гидронасоса 2, гидробака 3 рабочей жидкости, исполнительного гидроцилиндра 4, рулевой трапеции 5 передних управляемых колес; гидравлический привод управления задними управляемыми колесами, состоящий из гидронасоса 6, гидробака 7 рабочей жидкости, рулевого механизма 8, рулевой трапеции 9 задних управляемых колес.
Рулевое колесо 10 связано с преобразователем 11 угла его поворота в цифровой код. Входной вал-винт рулевого механизма 8 задних управляемых колес связан с преобразователем 12 угла его поворота в цифровой код. На цифровой компаратор величин 13 поступает два сигнала: с преобразователя 11 и с преобразователя 12. Привод рулевого механизма 8 задних управляемых колес осуществляет электродвигатель 14.
Рулевой механизм 8 задних управляемых колес состоит из корпуса-картера 15, вала 16 привода рулевой трапеции 9 задних управляемых колес с зубчатым сектором 17, входного вала-винта 18, поршня-рейки 19, реактивных плунжеров 20, пружины реактивных плунжеров 21, золотника 22.
Работает система рулевого управления следующим образом. При вращении рулевого колеса 10 в ту или иную сторону через гидравлический привод управления передними управляемыми колесами передние колеса поворачиваются на некоторый угол. При этом рулевое колесо 10 вращает и дает сигнал на установленный на нем преобразователь 11 угла поворота рулевого колеса в цифровой сигнал, цифровой код на преобразователе 11 изменяется.
Преобразователь 11 углового положения рулевого вала в цифровой код должен быть выполнен в виде кодового диска или дискового барабана на основе кода Грея. Код Грея, поскольку в нем соседние числа отличаются всегда значением только одного разряда, ни в одном переходе не дает ошибки большей, чем значение минимального шага дискретности, то есть угла, оцифрованного какой-то кодовой комбинацией (Потемкин И.С. Функциональные узлы цифровой автоматики. - М.: Энергоатомиздат, 1988. С.79-82).
При этом цифровой код на преобразователе 12 угла поворота входного вала-винта 18 рулевого механизма 8 управления задними управляемыми колесами в цифровой код, выполненном также в виде кодового диска или дискового барабана на основе кода Грея, остался неизменным.
Цифровой компаратор величин 13 сравнивает два цифровых кода и сразу же определяет направление воздействия (в какую сторону вращать). Выходной сигнал компаратора 13 включает электродвигатель 14 в нужную сторону. Электродвигатель 14 поворачивает вал-винт 18 рулевого механизма 8 управления задними управляемыми колесами и одновременно установленный на нем вал преобразователя 12. Так будет происходить до тех пор, пока цифровой компаратор величин 13 не определит равенство кодов с преобразователей 11 и 12. При равенстве кодов электродвигатель 14 остановится.
Цифровой компаратор величин 13 выявляет не только факт равенства двух поданных на вход кодов n- разрядных чисел А и В, но и сравнивает числа по значениям. Он имеет три выхода: А>В; А=В; А<В, и в зависимости от соотношения величин А и В активный уровень появляется на одном из этих выходов. Такой компаратор позволяет следящей системе определить направление воздействия, ликвидирующего рассогласование, а также сигнализировать о выходе величин за пределы допуска (Потемкин И.С. Функциональные узлы цифровой автоматики. - М.: Энергоатомиздат, 1988, С.134-135).
Так как возникающая при вращении вала-винта 18 осевая сила больше силы предварительного сжатия пружин 21 реактивных плунжеров 20, то вал-винт 18 и золотник 22 смещаются вправо или влево в зависимости от направления вращения вала-винта 18, сообщая одну из полостей корпуса-картера 15 рулевого механизма с линией высокого давления, а другую - со сливным каналом. Это возможно потому, что длина золотника 22 больше длины отверстия для него в корпусе клапана управления, вследствие чего золотник 22 и вал-винт 18 могут перемещаться в осевом направлении в каждую сторону на некоторую величину от среднего положения. Давление масла на торцы поршня-рейки 19 неодинаково, поэтому создается сила способствующая повороту зубчатого сектора 17 вала 16 рулевой трапеции 9 задних управляемых колес.
Положение деталей рулевого механизма 8 управления задними управляемыми колесами на фиг.2а соответствует или прямолинейному движению транспортного средства или остановке вращения рулевого колеса 10, когда масло свободно перекачивается насосом 6 в гидробак 7 поскольку нагнетательный и сливной каналы соединены между собой (нейтральное положение золотника 22), так как реактивная пружина 21 реактивными плунжерами 20 стремиться удержать золотник 22 в нейтральном положении.
При повороте рулевого колеса 10 золотник 22 перемещается, например, (фиг.2б) вправо, поскольку сила, прикладываемая к валу-винту 18 больше силы пружины 21 реактивных плунжеров 20. При этом линия высокого давления соединяется с полостью справа от поршня-рейки 19, а полость слева от поршня-рейки 19 соединяется со сливным каналом. Поворот задних управляемых колес осуществляется благодаря силе, создаваемой давлением масла на поршень-рейку 19.
При смещении золотника 22 влево (фиг.2в) соединяется полость слева от поршня-рейки 19 с линией высокого давления, а полость справа от поршня-рейки 19 со сливным каналом.
Таким образом, при совершении поворота транспортным средством происходит синхронный поворот передних и задних колес относительно остова. Причем с учетом реверса электродвигателя привода 14 механизма управления задними управляемыми колесами возможен поворот колес в одну и в разную стороны относительно остова. В блок схеме узла кодирования угла поворота (фиг.3) может быть встроено устройство временной задержки сигнала 23, подаваемого цифровым компаратором величин 13 на электродвигатель 14. В этом случае поворот задних колес будет осуществляться с запаздыванием относительно передних.
Использование различных способов поворота в одном транспортном средстве позволяют улучшить устойчивость его движения и маневренность.
Так при работе трактора на транспорте для улучшения его маневренности желательно применять поворот колес относительно остова в разные стороны; при работе на склонах для повышения устойчивости против опрокидывания - поворот колес в одну сторону относительно остова ("краб"); при работе в междурядьях пропашных культур при малых углах поворота управляемых колес для повышения устойчивости прямолинейного движения с целью не подрезания культурных растений желательно иметь неуправляемые задние колеса, которые могут включаться в работу лишь при определенном угле поворота передних на поворотной полосе, что позволит уменьшить радиус поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2003 |
|
RU2240943C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ПРОХОДИМОСТИ КОЛЕСНОГО ТРАКТОРА С ДВУХОСНЫМ ПРИЦЕПОМ | 2010 |
|
RU2456194C2 |
| ПЕРЕДВИЖНАЯ ЭСТАКАДА | 1999 |
|
RU2184070C2 |
| Гидроусилитель рулевого механизма транспортного средства | 1990 |
|
SU1728077A1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| МЕХАНИЗМ ЗАДНЕГО КОЛЕСА ПОЛУНАВЕСНОГО ОРУДИЯ | 2005 |
|
RU2288557C1 |
| ПРИВОД КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2396174C1 |
| ГИДРООБЪЕМНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180633C1 |

Изобретение относиться к машиностроению и может быть использовано на сельскохозяйственных тракторах. Система рулевого управления транспортного средства со всеми управляемыми колесами содержит рулевую трапецию передних управляемых колес, связанную с рулевым механизмом передних управляемых колес, а также рулевую трапецию задних управляемых колес с рулевым механизмом привода задних управляемых колес. Рулевой механизм привода задних управляемых колес имеет вал-винт и поршень-рейку, имеющую возможность перемещаться относительно вала-винта. Включение механизма привода задними управляемыми колесами осуществляет электродвигатель, а управление им осуществляется преобразователями углов поворота валов в цифровой код, который обрабатывается цифровым компаратором величин; для задержки поворота задних управляемых колес служит устройство временной задержки - реле времени. Технический результат заключается в повышении устойчивости движения и маневренности при различных способах поворота. 5 ил.
Система рулевого управления транспортного средства со всеми управляемыми колесами, содержащая рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом, рулевую трапецию задних управляемых колес с гидравлическим приводом, отличающаяся тем, что на валу рулевого колеса и на валу механизма управления задними управляемыми колесами установлены преобразователи их углового положения в цифровой код, выполненные на основе кода Грея, сигналы которых обрабатываются цифровым компаратором величин, между компаратором величин и электродвигателем привода механизма управления задними управляемыми колесами установлено устройство временной задержки сигнала, рулевой механизм задних управляемых колес имеет вал-винт и поршень-рейку, имеющую возможность перемещаться относительно вала-винта.
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| Способ получения фосфиновых или фосфитных производных @ - циклопентадиенилтрикарбонилрения | 1981 |
|
SU1009080A1 |
| JP 63312271 A, 20.12.1988 | |||
| JP 9315331 A, 09.12.1997 | |||
| US 6829055 В1, 07.12.2004 | |||
| JP 63166664 А, 09.07.1988. | |||

