Изобретение относится к области машиностроения, в частности к гидравлическим системам рулевого управления задними колесами транспортного средства.
Известна система рулевого управления транспортного средства со всеми управляемыми колесами, содержащая гидравлический привод управления передними управляемыми колесами и гидравлический привод управления задними управляемыми колесами, имеющий механизм запаздывания начала поворота задних колес относительно поворота передних колес, механизм стабилизации задних колес в среднем положении и тягу обратной связи.
Недостатком данной системы рулевого управления является сложность конструкции, большие габариты, низкая маневренность транспортного средства вследствие наличия запаздывания начала поворота задних колес относительно поворота передних колес, невозможность получения различных режимов поворота управляемых колес.
Наиболее близкой к изобретению по технической сущности является система рулевого управления транспортного средства со всеми управляемыми колесами, содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом, гидравлический привод управления передними управляемыми колесами, гидравлический привод управления задними управляемыми колесами, рулевую трапецию задних управляемых колес.
Недостатком конструкции данной системы является то, что она позволяет получить лишь один из режимов поворота управляемых колес.
Цель изобретения - улучшение маневренности транспортного средства за счет применения различных режимов поворота управляемых колес.
Поставленная цель достигается тем, что система рулевого управления транспортного средства со всеми управляемыми колесами, содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом, гидравлический привод управления передними управляемыми колесами, гидравлический привод управления задними управляемыми колесами, рулевую трапецию задних управляемых колес, согласно изобретению снабжена механизмом, состоящим из исполнительного гидроцилиндра, гидронасоса, гидрораспределителя, бака рабочей жидкости, предназначенным для изменения положения точки присоединения к рулевой трапеции передних управляемых колес шарнира передней поперечной тяги, через систему рычагов и тяг передающей сигнал угла поворота передних управляемых колес на гидравлический привод управления задними управляемыми колесами, соответственно управляющий исполнительным гидроцилиндром поворота задних управляемых колес. При этом передняя поперечная тяга выполнена в виде тросика с жесткими наконечниками, помещенного в плотный кожух с зацеплениями соответственно на остове и штоке гидроцилиндра направляющими концами. Рулевая трапеция передних управляемых колес снабжена жестко связанной с ней направляющей, позволяющей перемещаться в ней посредством исполнительного гидроцилиндра шарниру передней поперечной тяги.
На чертеже представлена схема предлагаемой системы.
Система рулевого управления транспортного средства содержит гидравлический привод управления передними управляемыми колесами, состоящий из рулевого механизма 1, гидронасоса 2, гидробака 3 рабочей жидкости, исполнительного гидроцилиндра 4, рулевой трапеции 5 передних управляемых колес, гидравлический привод управления задними управляемыми колесами, состоящий из гидронасоса 6, гидробака 7 рабочей жидкости, гидрораспределителя 8, исполнительного гидроцилиндра 9, устройства 10 для автоматического возврата задних управляемых колес в нейтральное положение, рулевой трапеции 11 задних управляемых колес.
Рулевая трапеция 5 передних управляемых колес посредством передней поперечной тяги 12, выполненной в виде гибкого тросика с жесткими наконечниками, помещенного без зазора в кожух с неподвижными направляющими концами, а также посредством продольной 14 и задней поперечной 13 тяг, двуплечих рычагов 15 и 16 кинематически связана с золотником 17 гидрораспределителя 8. Передняя поперечная тяга 12 связана с механизмом 18, предназначенным для изменения положения точки присоединения ее шарнира к рулевой трапеции 5 передних управляемых колес, через исполнительный гидроцилиндр 19.
Механизм 18 включает в себя исполнительный гидроцилиндр 19, гидрораспределитель 20, гидронасос 21, гидробак 22 рабочей жидкости, направляющую 23, жестко связанную с рулевой трапецией 5 передних управляемых колес.
Работает данная система следующим образом. Шток исполнительного гидроцилиндра 19 механизма 18 изменения точки присоединения шарнира передней поперечной тяги 12 к рулевой трапеции 5 передних управляемых колес находится в положении I. При повороте передних управляемых колес на некоторый угол передняя поперечная тяга 12, кинематически связанная с рулевой трапецией 5 передних управляемых колес, через направляющую 23 перемещается влево или вправо на некоторую величину, воздействуя посредством продольной тяги 14, задней поперечной тяги 13 и двуплечих рычагов 15 и 16 на золотник 17 гидрораспределителя 8, который передает сигнал исполнительному гидроцилиндру 9, поворачивающему через рулевую трапецию 11 задних управляемых колес задние колеса на некоторый угол в сторону, противоположную углу поворота передних управляемых колес. Данный режим поворота очень эффективен при работе машины в составе транспортного агрегата, значительно улучшая его маневренность. При работе машины с орудиями в междурядье при обработке пропавших культур в целях увеличения защитных зон задние колеса должны быть неуправляемыми. В целях достижения этого через гидрораспределитель 20 подается сигнал на исполнительный гидроцилиндр 19, который перемещает в направляющей 23, жестко связанной с рулевой трапецией 5 передних управляемых колес, шарнир крепления передней поперечной тяги 12. Совместно со штоком исполнительного гидроцилиндра 19 перемещается связанный с ним один из направляющих концов кожуха тросика передней поперечной тяги 12. Шток гидроцилиндра занимает положение II. При этом при повороте передних управляемых колес на некоторый угол передняя поперечная тяга 12, кинематически связанная с рулевой трапецией 5 передних управляемых колес, остается неподвижной, следовательно, сигнала на золотник 17 гидрораспределителя 8 не поступает, задние колеса остаются в нейтральном положении.
При выполнении некоторых видов работ, особенно при работе на склонах, очень удобно использовать режим поворота, при котором передние и задние колеса поворачиваются в одну и ту же сторону, что повышает значительно устойчивость машины. При необходимости получения данного режима поворота управляемых колес в конструкции данной системы рулевого управления на шток исполнительного гидроцилиндра 19 передается сигнал от гидрораспределителя 20. Шток исполнительного гидроцилиндра 19 перемещается совместно с шарниром передней поперечной тяги 12 по направляющей 23 в крайнее положение. Шток исполнительного гидроцилиндра 19 занимает положение III. Один из направляющих концов кожуха тросика передней поперечной тяги 12 совместно со штоком исполнительного гидроцилиндра 19 перемещается также в крайнее положение. При этом при повороте передних управляемых колес на некоторый угол передняя поперечная тяга 12, кинематически связанная с рулевой трапецией 5 передних управляемых колес, через направляющую 23 перемещается вправо или влево на некоторую величину, воздействуя посредством продольной тяги 14, задней поперечной тяги 13 и двуплечих рычагов 15 и 16 на золотник 17 гидрораспределителя 8, который передает сигнал исполнительному гидроцилиндру 9, поворачивающему через рулевую трапецию 11 задних управляемых колес задние колеса на некоторый угол в сторону, совпадающую по направлению с углом поворота передних управляемых колес.
Применение того или иного режима поворота зависит от вида выполняемой работы, от условий работы, от вида агрегатируемой с транспортным средством машины или орудия.
Таким образом, предлагаемая система позволяет получить различные режимы поворота управляемых колес, что в значительной мере улучшает маневренность транспортного средства, повышает качество выполняемых рабочих операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2003 |
|
RU2240943C1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2004 |
|
RU2277488C1 |
| ГИДРООБЪЕМНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180633C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1985 |
|
SU1298124A1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2157774C2 |
Использование: в машиностроении, в частности в гидравлических системах рулевого управления задними колесами транспортного средства. Сущность изобретения: система рулевого управления содержит рулевую трапецию 5 передних управляемых колес, связанную с рулевым механизмом 1, рулевую трапецию 11 задних управляемых колес с гидравлическим приводом, продольную тягу 14, кинематически связывающую рулевую трапецию передних колес с гидравлическим приводом задних колес. Рулевая трапеция 5 передних колес имеет направляющую 23, через которую связана с механизмом 18 изменения положения точки присоединения передней поперечной тяги 12 к рулевой трапеции 5 передних колес. За счет установки шарнира передней поперечной тяги 12 в положения I, II, III возможно изменение характера сигнала угла поворота передних управляемых колес, передаваемого на гидравлический привод управления задними колесами, что позволяет получить различные режимы поворота управляемых колес. 1 ил.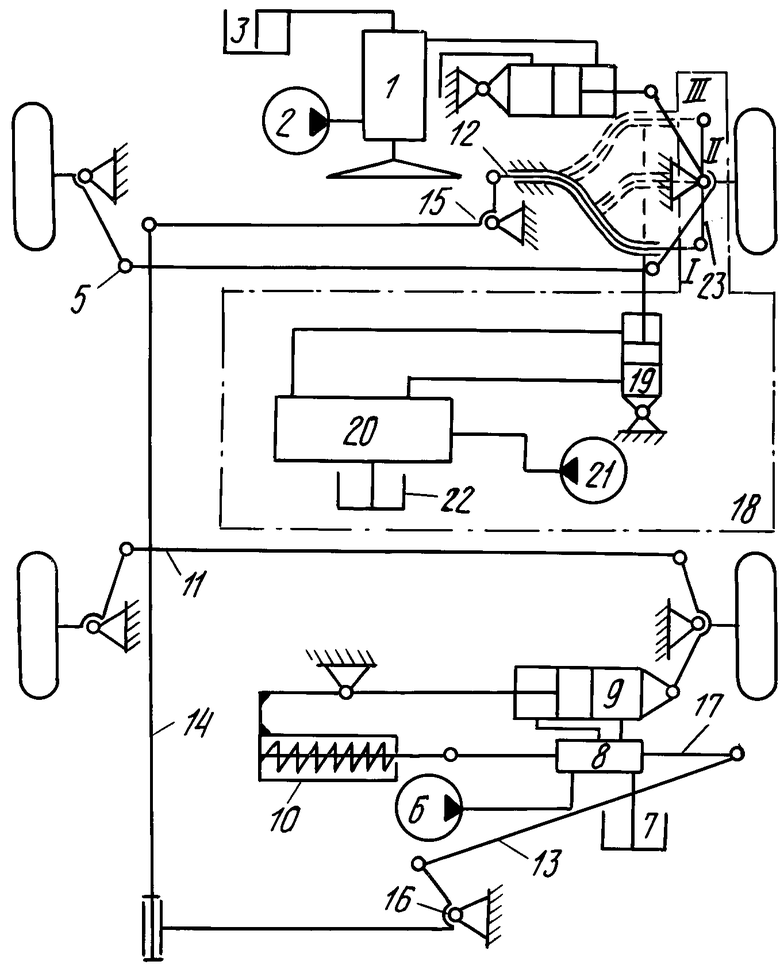
СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ, содержащая рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом и последовательно установленными и шарнирами, соединенными между собой тягой и кинематической связью с гидравлическим приводом поворота задних управляемых колес, который соединен с рулевой трапецией задних управляемых колес, отличающаяся тем, что она снабжена жестко связанной с рулевой трапецией передних управляемых колес направляющей, в которой установлен с возможностью перемещения шарнир крепления указанной тяги, которая образована тросом с жесткими наконечниками, установленными в изгибающемся кожухе с направляющими концевыми участками, соединенными с наконечниками для передачи усилия вдоль тяги.
