Изобретение относится к машиностроению и может быть использовано на сельскохозяйственных тракторах.
Известна система рулевого управления транспортного средства со всеми управляемыми колесами [Патент РФ №2013269, В 62 D 7/14, 30.05.94, БИ №10], содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом; рулевую трапецию задних управляемых колес с гидравлическим приводом, продольную тягу, кинематически связывающую рулевую трапецию передних колес с гидравлическим приводом задних колес; механизм изменения положения точки присоединения передней поперечной тяги к рулевой трапеции передних колес.
Недостатком данной конструкции является то, что она не позволяет осуществить устойчивое движение трактора при повороте передними колесами, что особенно проявляется при входе в поворот.
Наиболее близкой к заявленной системе рулевого управления является система рулевого управления транспортного средства со всеми управляемыми колесами [Патент РФ №2164211, В 62 D 7/14, 20.03.2001, БИ №8], содержащая рулевую трапецию передних управляемых колес, связанную с рулевым механизмом; рулевую трапецию задних управляемых колес с гидравлическим приводом; механизм изменения положения точки присоединения передней поперечной тяги к рулевой трапеции передних колес; жесткие рычаги, связанные с рулевой трапецией передних управляемых колес; двуплечий рычаг и дополнительную поперечную тягу.
Недостатком данной конструкции является то, что сигнал на гидравлический привод поворота задних управляемых колес передается от передних управляемых колес через механические и гидравлические связи, что приводит к его запаздыванию, и то, что сигнал на задние колеса передается только при максимальном угле поворота передних управляемых колес, что не позволяет реализовать предложенную схему движения при различных радиусах поворота.
Изобретение решает задачу повышения устойчивости движения трактора при любом радиусе поворота за счет устранения бокового скольжения и заноса, равномерного распределения вертикальных нагрузок по колесам.
Это достигается тем, что в системе рулевого управления транспортного средства со всеми управляемыми колесами, содержащей рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом, рулевую трапецию задних управляемых колес с гидравлическим приводом задних управляемых колес, связанную через насос-дозатор с рулевым механизмом, согласно изобретению гидрораспределитель гидравлического привода управления задних управляемых колес имеет дополнительную секцию, гидравлический привод управления задними управляемыми колесами имеет гидрораспределитель возврата их в нейтральное положение, корпус которого связан через рычаг с рулевой трапецией задних колес, а золотник - с пружинным демпфером.
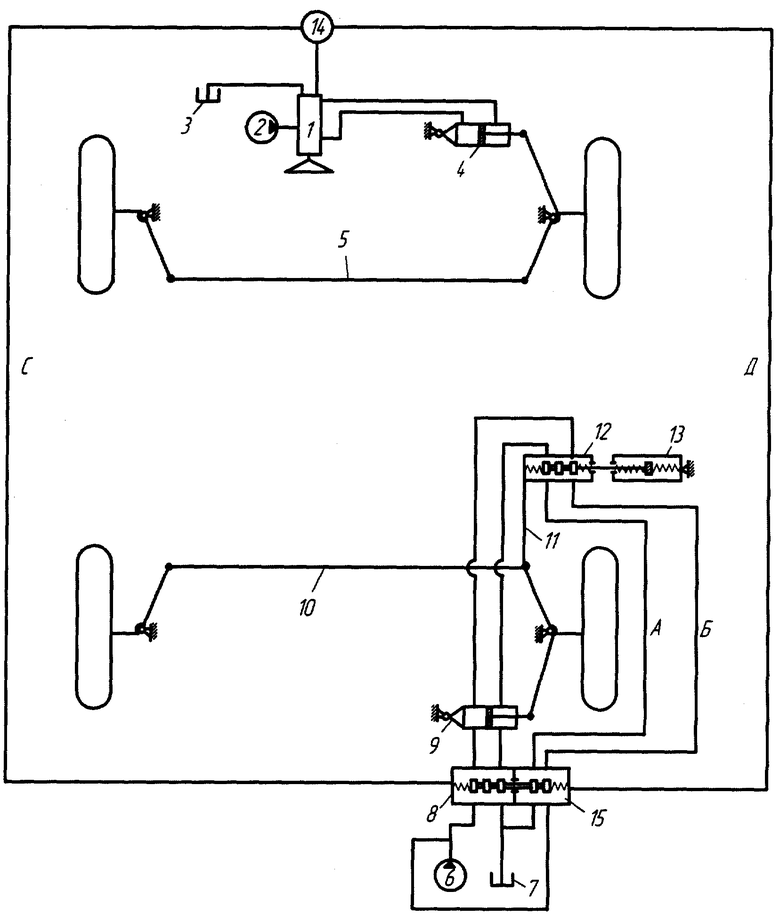
На чертеже представлена предлагаемая система рулевого управления со всеми управляемыми колесами.
Система рулевого управления транспортного средства содержит гидравлический привод управления передними управляемыми колесами, состоящий из рулевого механизма 1, гидронасоса 2, гидробака 3 рабочей жидкости, исполнительного гидроцилиндра 4, рулевой трапеции 5 передних управляемых колес; гидравлический привод управления задними управляемыми колесами, состоящий из гидронасоса 6, гидробака 7 рабочей жидкости, гидрораспределителя 8, исполнительного гидроцилиндра 9, рулевой трапеции 10 задних управляемых колес.
Рулевая трапеция 10 задних управляемых колес посредством рычага 11 связана с корпусом гидрораспределителя 12 автоматического возврата задних управляемых колес в нейтральное положение. Золотник гидрораспределителя 12 связан с подвижным штоком пружинного демпфера 13. Управление гидрораспределителем 8 осуществляется с помощью насоса-дозатора 14, приводимого в движение валом рулевого колеса. Гидрораспределитель 8 управления задними колесами имеет дополнительную секцию 15, соединяющую в нейтральном положении гидролинии А и Б с соответствующими каналами гидронасоса 6 и разъединяющую их при отклонении в любую сторону.
Работает система рулевого управления следующим образом. При вращении рулевого колеса в ту или иную сторону через гидравлический привод управления передними управляемыми колесами передние колеса поворачиваются на некоторый угол. При этом вал рулевого колеса приводит в движение насос-дозатор 14, управляющий гидрораспределителем 8, входящим в гидравлический привод управления задними управляемыми колесами.
Насос-дозатор 14 вызывает перепад давлений в гидролиниях С и Д, перемещая в ту или иную сторону золотник гидрораспределителя 8, управляющего гидроцилиндром 9 поворота задних управляемых колес, что приводит к повороту задних колес, который будет продолжаться до прекращения вращения рулевого колеса. Дополнительная секция 15 гидрораспределителя 8 при этом переходит из открытого положения в закрытое. При повороте задних колес происходит также смещение рычагом 11 корпуса гидрораспределителя 12 возврата задних колес в нейтральное положение, золотник которого соединен с подвижным штоком неподвижного пружинного демпфера 13.
Таким образом, поворот задних сопровождается смещением золотника гидрораспределителя 12 относительно его корпуса с последующим перемещением подвижной части пружинного демпфера 13, поэтому при вращении рулевого колеса он находится в смещенном положении и потенциально готов к управлению гидроцилиндром 9 поворота задних управляемых колес, однако гидролинии А и Б заперты дополнительной секцией 15 гидрораспределителя 8.
Прекращение вращения рулевого колеса приводит к выравниванию давления в гидролиниях С и Д и соответствующему переходу основной секции гидрораспределителя 8 в “запертое” положение, а дополнительной секции 15 - в “открытое”, подавая давление к также находящемуся в “открытом” состоянии гидрораспределителю 12, начиная тем самым возврат задних колес в нейтральное положение.
Возврат задних колес в нейтральное положение будет продолжаться до перехода пружинного демпфера 13 в равновесное состояние, соответствующее как нейтральному положению золотника гидрораспределителя 12, так и нейтральному положению задних управляемых колес. Дальнейший поворот происходит передними управляемыми колесами.
Таким образом, при совершении кругового поворота с целью улучшения устойчивости движения на участке “вход в поворот” осуществляется синхронный поворот передних и задних колес относительно остова в одну сторону, то есть происходит движение “крабом”. Это в отличие от поворота передними управляемыми колесами позволяет устранить боковое скольжение и занос агрегата, равномерно распределить нагрузки на колеса трактора на самом динамически нагруженном участке поворота. При достижении передними управляемыми колесами необходимого угла поворота задние колеса автоматически возвращаются в нейтральное положение и в дальнейшем поворот осуществляется передними управляемыми колесами.
Следовательно, предлагаемая система рулевого управления позволит улучшить устойчивость движения трактора при его повороте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1990 |
|
SU1729880A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1988 |
|
SU1565741A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1985 |
|
SU1298124A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
| Малогабаритный трактор | 1990 |
|
SU1717458A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1991 |
|
RU2013269C1 |
| Система поворота шарнирно сочлененной гусеничной машины | 1986 |
|
SU1323451A1 |
| Гидравлическая система рулевого управления колесного транспортного средства | 1985 |
|
SU1279898A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
Изобретение относится с машиностроению и может быть использовано на сельскохозяйственных тракторах. Система рулевого управления транспортного средства со всеми управляемыми колесами содержит рулевую трапецию передних управляемых колес, связанную с рулевым механизмом, рулевую трапецию задних управляемых колес с гидравлическим приводом, связанную с рулевым механизмом через насос-дозатор. Гидрораспределитель управления поворотом задних управляемых колес содержит дополнительную секцию. Гидравлический привод управления поворотом задних управляемых колес имеет гидрораспределитель автоматического возврата задних управляемых колес в нейтральное положение, корпус которого жестко связан через рычаг с рулевой трапецией задних управляемых колес, а золотник - с пружинным демпфером. Технический результат заключается в повышении устойчивости движения трактора при любом радиусе поворота. 1 ил.
Система рулевого управления транспортного средства со всеми управляемыми колесами, содержащая рулевую трапецию передних управляемых колес, связанную гидравлическим приводом поворота передних управляемых колес с рулевым механизмом, рулевую трапецию задних управляемых колес с гидравлическим приводом, связанную через насос-дозатор с рулевым механизмом, отличающаяся тем, что гидравлический привод управления поворотом задних управляемых колес имеет гидрораспределитель автоматического возврата задних колес в нейтральное положение, корпус которого жестко связан через рычаг с рулевой трапецией задних колес, а золотник - с пружинным демпфером.
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| ИМИТАТОР ЭМУЛЬСИОННЫХ ПЕСТИЦИДОВ илиГЕРБИЦИДОВ | 0 |
|
SU287463A1 |
| DE 3410115 A1, 03.10.1985 | |||
| ПРИВОД ДЛЯ ПРИВОДНОГО УСТРОЙСТВА И СПОСОБ ЕГО МОНТАЖА | 2013 |
|
RU2636031C2 |

