Изобретение относится к космической технике.
Известны искусственные спутники Земли (ИСЗ), имеющие жесткую конструкцию (например, ИСЗ «Спутник-1», «Авангард», «Космос» - см., например, К. Гэтланд «Космическая техника», М.: «Мир», 1986, стр. 24-31), а также ИСЗ с мягкой (тонкопленочной) конструкцией (например, надувные ИСЗ «Эхо-1», «Эхо-2», «Пагеос» - см., например, Е.Н. Поляхова «Космический полет с солнечным парусом: проблемы и перспективы», М.: «Наука», 1986, стр. 21).
Известны также искусственные спутники Земли, снабженные кольцевыми стабилизаторами (КС), например, для обеспечения пассивной аэродинамической стабилизации относительно направления полета (НП) на низких и средних орбитах - см., например, В.И. Левантовский «Механика космического полета в элементарном изложении», М.: «Наука», 1974, стр. 139-140, рис. 49 - ИСЗ «Космос-149»; В.М. Ковтуненко, В.Ф. Камеко, Э.П. Яскевич «Аэродинамика орбитальных космических аппаратов», Киев, «Наукова думка», 1977, стр.131, 132 - ИСЗ «Космос-149», «Космос-320» (ближайший аналог). При этом стабилизация ИСЗ по крену (устранение проворота относительно продольной оси) достигалась дополнительной установкой силовых гироскопов.
Однако ИСЗ-аналоги не позволяют реализовать орбитальное развертывание значительных по габаритам/площади (на уровне десятков-сотен м2) отражающих конструкций таким образом, чтобы одновременно обеспечивались пассивная аэродинамическая стабилизация и минимизация аэродинамического сопротивления ИСЗ.
Целью предлагаемого изобретения является формирование такой конфигурации ИСЗ, которая обеспечивает пассивную аэродинамическую стабилизацию аппарата при минимизации его аэродинамического сопротивления и максимизации светимости (наблюдаемости с поверхности Земли) в отраженном солнечном свете, при выведении ИСЗ либо кластера ИСЗ на существующих ракетах-носителях.
Указанная цель достигается тем, что в ИСЗ, включающем корпус и аэродинамический КС, корпус выполнен в виде кольца с удлинением 0,01…10,0 и отношением наружного диаметра кольца к внутреннему 1,01…5,0, а КС выполнен в виде пленочного, с металлизированной наружной поверхностью рукава с удлинением 1…100, соосно закрепленного на корпусе, при этом на этапе выведения ИСЗ на орбиту КС складывается во внутреннюю кольцевую полость корпуса. Передняя по НП поверхность корпуса может быть выполнена в виде воронки. На свободном (не скрепленном с корпусом) торце КС может быть установлена диафрагма, при этом диафрагма может выполняться перфорированной, с площадью перфорации на уровне 0,01…0,9 площади диафрагмы. Корпус и диафрагма могут быть соединены одной или более стропами, причем, при наличии двух и более строп, они прокладываются в пленочных гаргротах пленочного рукава КС симметрично продольной оси КС. При этом в поперечном сечении пленочного рукава КС могут устанавливаться кольцевые ребра жесткости (один или несколько). К корпусу ИСЗ могут быть последовательно присоединены посредством троса 1…10 дополнительных КС, при этом интервалы по НП между смежными КС должны составлять 50…5000 м. Дополнительные КС могут быть снабжены диафрагмами на переднем по НП и заднем торцах пленочного рукава. В ряде случаев в корпусе ИСЗ может быть размещен кольцевой механический демпфер, при этом в качестве диссипатора энергии может использоваться картечь или дробь. Дополнительно на наружной поверхности корпуса ИСЗ может быть установлено не менее одной пары элеронов. Кроме того, ИСЗ по предлагаемому техническому решению может быть дополнительно снабжен реактивной двигательной установкой (ДУ). При этом ДУ включает не менее двух многосопловых блоков, располагаемых симметрично на наружной поверхности корпуса. Вариантом рабочего тела ДУ может являться холодный газ.
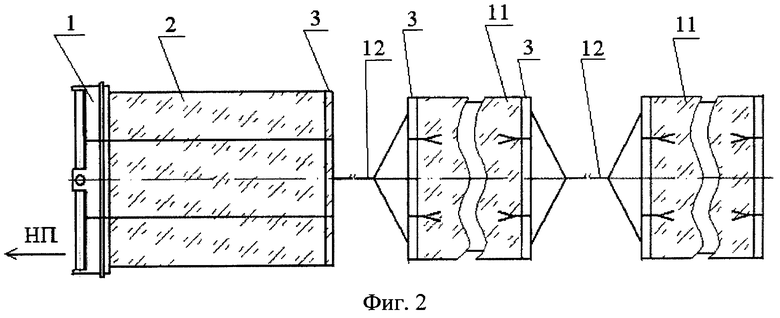
Конструктивно-компоновочная схема ИСЗ по предлагаемому техническому решению представлена на фиг. 1, вариант ИСЗ с дополнительными КС - на фиг. 2.
Приняты обозначения:
1 - корпус ИСЗ;
2 - КС-пленочный рукав;
3 - диафрагма;
4 - стропа;
5 - кольцевое ребро жесткости;
6 - двигательная установка;
7 - многосопловой блок ДУ;
8 - демпфер (включая диссипатор энергии);
9 - элерон;
10 - бортовое оборудование и аппаратура;
11 - дополнительный КС-пленочный рукав;
12 - трос.
Функционирование ИСЗ по предлагаемому техническому решению осуществляется следующим образом. ИСЗ (кластер из нескольких ИСЗ) выводится на рабочую орбиту штатным порядком ракетой-носителем. После разделения с носителем (и увода носителя с рабочей орбиты) каждый ИСЗ осуществляет развертывание сложенного на этапе выведения в кольцевой полости корпуса поз. 1 КС-пленочного рукава поз. 2 (например, посредством пружинного толкателя диафрагмы поз. 3 - на чертежах не показан). Далее «наддутая» форма КС поз. 2 поддерживается частицами остаточной атмосферы, поступающими через заборник-«воронку» корпуса поз. 1, выполненного, например, в форме кольцевого восьмигранника (см. фиг. 1). Следует отметить, что заданная ориентация/стабилизация продольной оси ИСЗ относительно НП осуществляется посредством аэродинамических сил в пассивном режиме неограниченно долго (до высот полета ~400 км - см., например, В.В. Белецкий «Движение искусственного спутника относительно центра масс», М.: «Наука», 1965, стр. 56, рис. 6 - Моменты сил, действующих на спутник Земли, в зависимости от высоты орбиты), в т.ч. с присоединенными дополнительными КС поз. 11. На более высоких орбитах развернутый КС поз. 2 фиксируется в заданном положении раздвижным каркасным механизмом, например, типа «тещин язык», или «многозвенный пантограф», или «телескопическая штанга».
С целью максимизации относительной площади заборника частиц остаточной атмосферы, а также формирования благоприятного для аэродинамической стабилизации эллипсоида инерции «тяжелого» корпуса поз. 1 (главная ось инерции ИСЗ совпадает с его продольной осью) - корпус поз. 1 выполнен в виде кольца с удлинением (отношение длины корпуса к диаметру его миделя) 0,01…10,0 и отношением наружного диаметра миделя корпуса к внутреннему диаметру (иначе, диаметру канала заборника) 1,01…5,0. В свою очередь, с целью максимизации площади и отражающих характеристик при минимизации габаритов в сложенном состоянии - КС поз. 2 выполнен в виде пленочного, с металлизированной наружной поверхностью рукава с удлинением (отношение длины развернутого КС к его миделю) 1…100, соосно закрепленного на корпусе поз. 1, при этом на этапе выведения КС поз. 2 складывается во внутреннюю кольцевую полость корпуса поз. 1 и развертывается в орбитальном полете.
В качестве конструкционного материала КС-пленочного рукава поз. 2 может применяться, например, алюминированная полиэтилентерефталатная и/или полиимидная пленка толщиной 5…40 мкм. Для придания конструкции КС необходимой жесткости, на свободном (незакрепленном на корпусе поз. 1 ИСЗ) торце КС поз. 2 может быть установлена диафрагма (относительно жесткая плоская шайба с габаритами поперечного сечения КС) поз. 3. При этом с целью организованного выпуска частиц остаточной атмосферы во внешнюю среду диафрагма может выполняться перфорированной, причем площадь перфорации составляет 0,01…0,9 площади диафрагмы поз. 3 (определяется диапазоном высот начальных рабочих орбит ИСЗ - чем выше орбита, тем меньше должна быть относительная площадь перфорации).
Корпус поз. 1 и диафрагма поз. 3 могут соединяться стропами поз. 4 (одной или несколькими), которые обеспечивают силовую связь указанных элементов (поскольку прочности КС-пленочного рукава поз. 2 в ряде случаев может оказаться недостаточно). При наличии двух и более строп поз. 4 - их целесообразно располагать в пленочных гаргротах КС поз. 2 симметрично продольной оси КС. В этом случае, при полном развертывании КС обеспечивается формирование рациональной силовой схемы соединения корпуса поз. 1 с диафрагмой поз. 3 посредством строп поз. 4 и, одновременно, поддержание «полноты» КС-пленочного рукава поз. 2 «натянутыми» внутри пленочного гаргрота стропами поз. 4.
Дополнительное поддержание «полноты» обводов КС-пленочного рукава поз. 2 может осуществляться, например, посредством установки в поперечном сечении (либо в нескольких поперечных сечениях по длине КС) пленочного рукава кольцевых ребер жесткости поз. 5. Подобное каркасирование КС-пленочного рукава поз. 2, с одной стороны, допускает его компактное складывание, с другой стороны, обеспечивает поддержание его «полноты» независимо от параметров остаточной атмосферы (в т.ч. на высотах полета ИСЗ более 400 км).
В свою очередь, на высотах полета менее 400 км ИСЗ может быть оборудован дополнительными пленочными КС поз. 11, присоединяемыми к корпусу поз. 1 посредством троса поз. 12 (см. фиг. 2). Устойчивость такого составного ИСЗ вдоль НП обеспечивается за счет соответствующего подбора баллистических коэффициентов корпуса поз. 1 и дополнительных КС поз. 11. При этом для максимизации наблюдаемости ИСЗ с поверхности Земли (для невооруженного человеческого глаза с разрешением 1…2 угл. мин) интервалы между смежными КС поз. 11 по НП должны составлять 50…5000 м (для высот полета ИСЗ 100…400 км).
Для увеличения «полноты» развернутых дополнительных КС поз. 11 они могут снабжаться диафрагмами (относительно жесткими плоскими шайбами с габаритами поперечного сечения КС) на переднем по НП и заднем торцах пленочного рукава.
С целью стабилизации угловой скорости проворота ИСЗ по крену (т.е. относительно продольной оси аппарата) в его корпусе поз. 1 может размещаться кольцевой механический демпфер поз. 8, где в качестве диссипатора энергии применяется картечь или дробь. Следует отметить, что демпфер поз. 8 является пассивной системой стабилизации по крену, которая не позволяет ИСЗ «накопить» сколь-нибудь значительный гироскопический момент, который мог бы вносить возмущения при аэродинамической ориентации/стабилизации аппарата по НП.
Кроме того, стабилизация проворота ИСЗ по крену на низких орбитах может быть решена посредством установки элеронов поз. 9, в т.ч. в дополнение к демпферу поз. 8. Следует отметить, что варьируя площадью, плечом, углом разворота относительно НП и количеством элеронов поз. 9, можно реализовать как «мягкий» (на уровне ~10-5 Н·м), так и относительно «жесткий» (на уровне ~10-2 Н·м) моментный режим поддержания заданного угла крена корпуса поз. 1 ИСЗ. При этом компоновочно блок управления элеронами поз. 9 может размещаться, например, в отсеке оборудования и аппаратуры поз. 10 корпуса поз. 1 на максимальном плече относительно центра масс (ЦМ) ИСЗ.
Представленные выше варианты реализации элементов ИСЗ позволяют аппарату совершать длительный ориентированный орбитальный полет за счет взаимодействия с веществом околоземного пространства, т.е. в пассивном (безрасходном по рабочему телу) режиме. С другой стороны, дополнительное оснащение ИСЗ активными элементами расширяет его функциональные и маневренные возможности. Например, при размещении на ИСЗ дополнительно реактивной двигательной установки может быть реализовано «точное» управление положением ЦМ аппарата в пространстве и его «строгая» ориентация относительно центра масс. При этом для пространственного маневрирования ИСЗ во всех направлениях представляется целесообразным его оснащение реактивной двигательной установкой поз. 6, которая включает не менее двух многосопловых блоков поз. 7, располагаемых симметрично на наружной поверхности корпуса поз. 1 ИСЗ.
Для относительно «мягкого» управления положением ЦМ ИСЗ на орбите, а также ориентацией аппарата относительно ЦМ - в качестве рабочего тела ДУ поз. 6 целесообразно применение холодного газа (азот, гелий, др.). При этом обеспечивается точное и надежное дозирование реактивных импульсов ДУ поз. 6, а использование конструктивно простых и легких многосопловых блоков поз. 7 позволяет рационально расположить элементы ДУ на корпусе поз. 1 ИСЗ.
Применение предложенного технического решения целесообразно для эскадренных ИСЗ космической рекламы, групповых ИСЗ-мишеней калибровки/юстировки оптических и радиотехнических наземных комплексов контроля космического пространства, при осуществлении многопозиционных измерений параметров верхней атмосферы Земли по характеру движения групп ИСЗ, а также в целом ряде других практических приложений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ | 2014 |
|
RU2569236C1 |
| СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ | 2011 |
|
RU2592121C2 |
| СПОСОБ АКТИВНО-ПАССИВНОГО УСПОКОЕНИЯ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2463221C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ ГРУППЫ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ (ВАРИАНТЫ) | 2015 |
|
RU2583507C1 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |
| Спускаемый аппарат-буксир для снятия космических объектов с орбиты | 2015 |
|
RU2626788C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО СПУСКЕ С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2561490C1 |
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2166464C2 |
| СИСТЕМА НАВИГАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2018 |
|
RU2686318C9 |
| СПОСОБ УПРАВЛЕНИЯ СХОДОМ КОСМИЧЕСКОГО АППАРАТА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2559430C2 |
Изобретение относится к космической технике и может быть использовано в искусственных спутниках Земли (ИСЗ). ИСЗ содержит силовой корпус в виде кольца с удлинением и передней частью в виде воронки, с кольцевым механическим демпфером с картечью или дробью, с элеронами, аэродинамический кольцевой стабилизатор (КС) в виде пленочного с металлизированной наружной поверхностью рукава с удлинением, гаргротами и кольцевыми ребрами жесткости, с перфорированной диафрагмой, стропы, тросы, дополнительные КС с диафрагмами, реактивную двигательную установку с многосопловыми блоками и рабочим телом в виде холодного газа. 14 з.п. ф-лы, 2 ил.
1. Искусственный спутник Земли (ИСЗ), включающий силовой корпус и аэродинамический кольцевой стабилизатор (КС), отличающийся тем, что корпус выполнен в виде кольца с удлинением 0,01…10,0 и отношением наружного диаметра миделя кольца к внутреннему диаметру 1,01…5,0, а КС выполнен в виде пленочного, с металлизированной наружной поверхностью рукава с удлинением 1…100, соосно закрепленного на корпусе, с возможностью складывания во внутреннюю кольцевую полость корпуса и последующего развертывания.
2. ИСЗ по п. 1, отличающийся тем, что передняя по направлению полета (НП) часть корпуса выполнена в виде воронки.
3. ИСЗ по п. 1, отличающийся тем, что на незакрепленном торце КС установлена диафрагма.
4. ИСЗ по п. 3, отличающийся тем, что диафрагма выполнена перфорированной, при этом площадь перфорации составляет 0,01…0,9 площади диафрагмы.
5. ИСЗ по п. 3, отличающийся тем, что корпус и диафрагма соединены одной или более стропами.
6. ИСЗ по п. 5, отличающийся тем, что при двух и более стропах они проложены в пленочных гаргротах пленочного рукава КС симметрично продольной оси КС.
7. ИСЗ по п. 1, отличающийся тем, что в поперечном сечении пленочного рукава КС установлено не менее одного кольцевого ребра жесткости.
8. ИСЗ по п. 1, отличающийся тем, что к его корпусу последовательно присоединены посредством троса 1…10 дополнительных КС, при этом интервалы по НП между смежными КС составляют 50…5000 м.
9. ИСЗ по п. 8, отличающийся тем, что дополнительные КС снабжены диафрагмами на переднем по НП и заднем торцах пленочного рукава.
10. ИСЗ по п. 1, отличающийся тем, что в его корпусе размещен кольцевой механический демпфер.
11. ИСЗ по п. 10, отличающийся тем, что в демпфере в качестве диссипатора энергии используется картечь или дробь.
12. ИСЗ по п. 1, отличающийся тем, что на наружной поверхности корпуса установлено не менее одной пары элеронов.
13. ИСЗ по п. 1, отличающийся тем, что он дополнительно снабжен реактивной двигательной установкой (ДУ).
14. ИСЗ по п. 13, отличающийся тем, что ДУ включает не менее двух многосопловых блоков, размещенных симметрично на наружной поверхности корпуса.
15. ИСЗ по п. 13, отличающийся тем, что рабочим телом ДУ является холодный газ.
| Устройство для наведения циферблатные весы | 1931 |
|
SU27801A1 |
| СПОСОБ И УСТРОЙСТВО АЭРОДИНАМИЧЕСКОЙ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА ВО ВРЕМЯ СПУСКА НА ЗЕМЛЮ | 2005 |
|
RU2363627C2 |
| US 5242134 A1, 07.09.1993 | |||
| US 20110079684 A1, 07.04.2011. | |||

