Изобретение относится к медицинским устройствам (хирургическим инструментам), предназначенным для проведения лапароскопической гистерэктомии.
Известен манипулятор маточный [1] для проведения лапароскопической гистерэктомии, содержащий корпус, пружинную рукоятку, наконечник, стержень с рычажным механизмом для изменения положения наконечника в матке, трубку для уплотнения влагалища, когтистую лапку.
Наиболее близким к предлагаемому устройству можно считать манипулятор маточный Manipulators, C.C.L vaginal extractor Clermont-Ferrand Model [2], содержащий корпус с фиксатором, рукоятку, имеющую возможность поворота на оси в корпусе, направляющую трубку, зафиксированную пружинным стопором в корпусе, подвижную трубку с наконечником, втулку с эластичными плоскими кольцами, расположенными на втулке с промежутками, тягу, соединенную с одной стороны сферическим шарниром с рукояткой, а с другой стороны рычагами через вилку со стержнем, имеющим коническую винтовую нарезку и поворачивающимся рукояткой на угол до 60o с фиксацией в нескольких промежуточных положениях.
Манипулятор маточный [2] имеет несколько существенных недостатков:
1. Эластичные плоские кольца не обеспечивают полного и надежного уплотнения влагалища во время операции.
2. Эластичные плоские кольца вызывают травматизм влагалища при выводе втулки с кольцами из влагалища.
3. Поворот рукоятки для изменения углового положения стержня с конической нарезкой при операции крайне неудобен, так как связан с изменением ее углового положения относительно оси инструмента, что требует от оператора сначала неудобного движения управляющей руки, а далее длительного удерживания инструмента за рукоятку, находящуюся под углом относительно оси инструмента.
Предлагается манипулятор маточный, в котором исключены указанные недостатки.
На фиг. 1 изображен манипулятор маточный, вид сбоку.
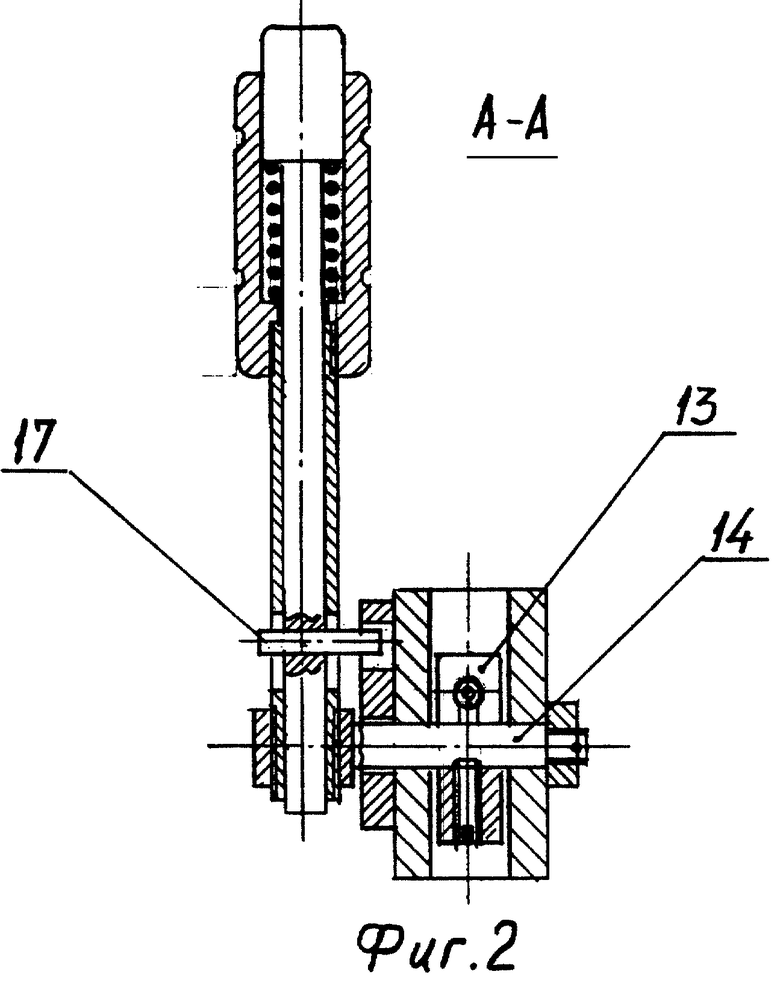
На фиг. 2 - разрез А-А на фиг. 1.
Предлагаемый манипулятор маточный содержит корпус 1, рукоятку 2, соединенную с корпусом неподвижно, направляющую трубку 3, зафиксированную в корпусе винтом 4, подвижную трубку 5 с полусферой 6, втулку 7 с надувной эластичной манжетой 8, тягу 9, стержень с ленточной конической винтовой нарезкой 10, имеющий ось вращения в вилке 11 направляющей трубки 3 и соединенный рычагами 12 с тягой 9. Тяга 9 шарниром связана с кулачком 13, закрепленным на оси 14, расположенной в корпусе 1. На боковой поверхности корпуса закреплена пластина фиксатора 15 для фиксации угловых положений стержня 10 при операционных манипуляциях. На конце оси 14 установлена ручка 16 с пружинным фиксатором 17. К втулке 7 с помощью эластичной трубки 18 присоединено устройство наддува и сброса, состоящее из нагнетателя 19 с головкой 20, в которой имеется вентиль, прямой и обратный клапаны.
Работа манипулятора маточного происходит следующим образом.
Манипулятор маточный фиксируется в цервикальном канале матки с помощью конической винтовой нарезки стержня 10. Ручкой 16 для облегчения процесса лигирования маточных сосудов производится флексия матки в вертикальной плоскости (плоскости рукоятки 2) на угол до 60o с возможностью фиксации ручки 16 в нескольких промежуточных положениях.
По окончании пересечения крестцово-маточно-кардинального связочного комплекса во влагалище вводится втулка 7 с эластичной манжетой 8, которая с помощью устройства наддува и сброса надувается до объема, обеспечивающего плотное прилегание манжеты к стенкам влагалища, полную обтурацию просвета влагалища, и тем самым исключается потеря пневмоперитонеума.
Полусфера 6 трубки 5 обеспечивает натяжение свода матки, что позволяет обозначить границы места рассечения стенки влагалища.
Путем постепенного вращательного перемещения полусферы 6 кзади и кпереди производится циркулярная кульдотомия.
С помощью подтягивания манипулятора маточного наружу матка, в которой находится стержень с конической винтовой нарезкой 10, выводится во влагалище. Далее стержень 10 путем обратного вращения всего устройства удаляется из цервикального канала, в эластичной манжете 8 сбрасывается давление, и манипулятор маточный удаляется из влагалища.
Источники информации
1. Патент ФРГ N DE 19603981 C2, кл. A 61 B 17/42.
2. Manipulators, C.C.L. vaginal extractor Clermont-Ferrand Model. Промышленный каталог The world of endoscopy, laparoscopy, 3rd edition 1/98, раздел 17, фирмa Karl Storz GmbH & Co - ФРГ.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР МАТОЧНЫЙ | 2006 |
|
RU2311883C1 |
| МАНИПУЛЯТОР МАТОЧНЫЙ | 2000 |
|
RU2175528C1 |
| ЭКСТРАКТОР ВЛАГАЛИЩНЫЙ | 2001 |
|
RU2197187C2 |
| ВЛАГАЛИЩНЫЙ ОБТЮРАТОР | 2001 |
|
RU2197188C2 |
| ВЛАГАЛИЩНЫЙ ОБТЮРАТОР | 2005 |
|
RU2290111C1 |
| КЛАПАН ДЛЯ ТРОАКАРА (ВАРИАНТА) | 2006 |
|
RU2322200C1 |
| ГИЛЬЗА ТРОАКАРА | 2005 |
|
RU2288655C1 |
| АКУШЕРСКО-ГИНЕКОЛОГИЧЕСКИЙ ПРИБОР ДЛЯ ОКАЗАНИЯ ПОМОЩИ БОЛЬНЫМ НАЧАЛЬНОГО ПОСЛЕРОДОВОГО ПЕРИОДА | 2009 |
|
RU2402292C1 |
| СПОСОБ ТРАНСВАГИНАЛЬНОЙ ГИСТЕРЭКТОМИИ С ЛАПАРОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ И НАСАДКА К МОРЦЕЛЛЯТОРУ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2013 |
|
RU2575547C2 |
| УСОВЕРШЕНСТВОВАННАЯ МЕТОДИКА ОПЕРАЦИИ КОЛЬПОПОЭЗА ИЗ ТАЗОВОЙ БРЮШИНЫ С ЛАПАРОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ | 2015 |
|
RU2587723C1 |
Изобретение относится к медицинским устройствам (хирургическим инструментам) и может быть использовано для проведения лапароскопической гистерэктомии. Манипулятор имеет корпус с фиксатором, рукоятку, направляющую трубку, подвижную трубку с полусферой и подвижную втулку с эластичным уплотнительным элементом. Эластичный уплотнительный элемент выполнен в виде надувной манжеты из латекса или другого эластичного материала. Манжета имеет при наддуве форму тела вращения и объем для обтурации просвета влагалища и предупреждения потери пневмоперитонеума. В результате достигается удобство работы с инструментом, а также полное и надежное уплотнение влагалища во время операции и снижение травматичности. 2 з.п. ф-лы, 2 ил.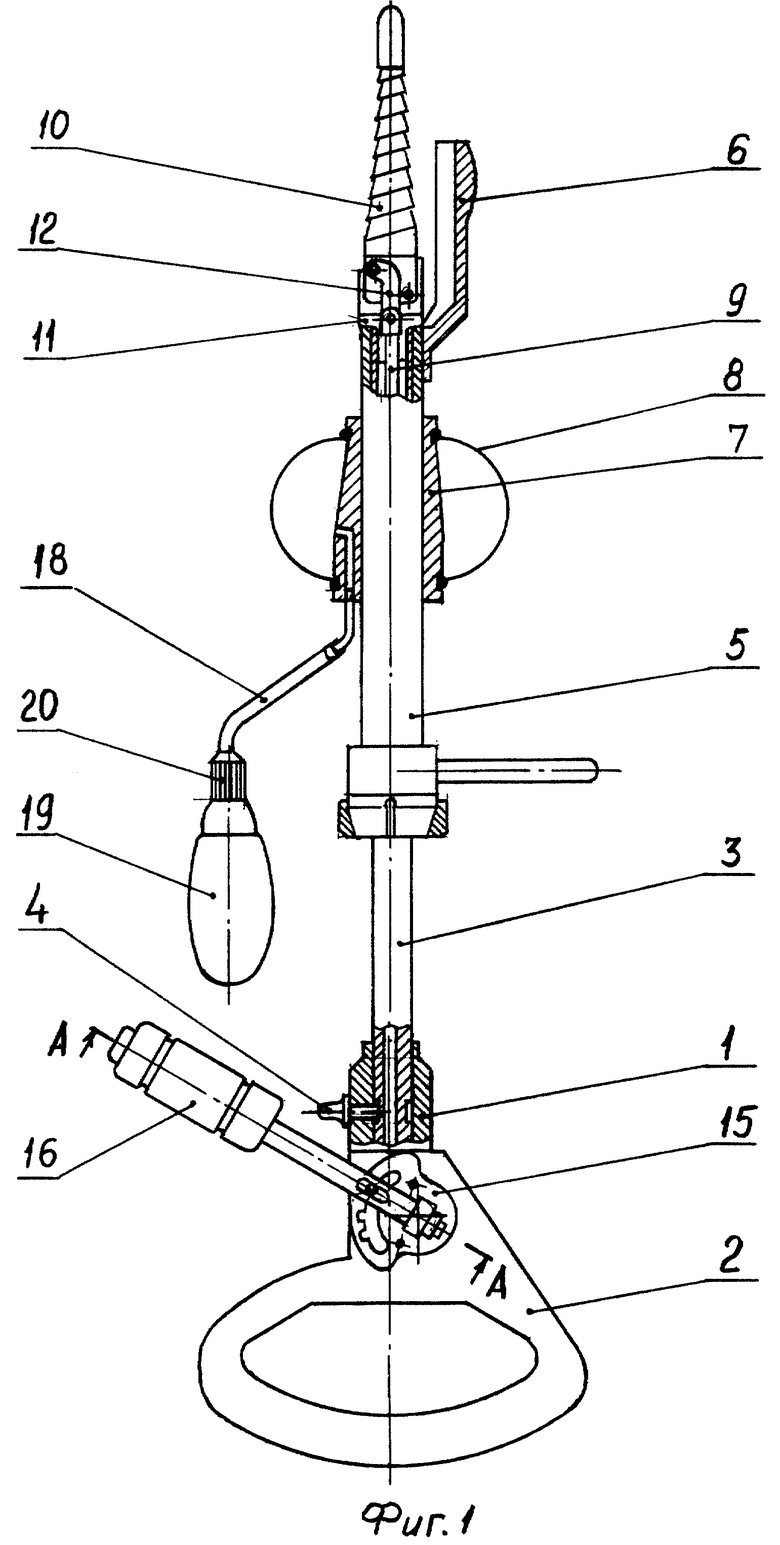
| Промышленный каталог фирмы KARL STORZ GmbH & Co "THE WORLD OF ENDOSCOPY, LAPAROSCOPY", 3rd edition 1/98, раздел 17, GYN-ACC 12A | |||
| Маточный интубатор | 1984 |
|
SU1316665A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОЖАЙНЫХ СВОЙСТВ СЕМЯН ПШЕНИЦЫ | 2014 |
|
RU2588468C2 |
| Каталог А/О Швабе | |||
| - М., 1901, с.607, № 16165. | |||

