Изобретение относится к хирургическим инструментам и может быть использовано в гинекологии, например, для проведения лапароскопической гистерэктомии.
Известен маточный интубатор, содержащий корпус, неподвижную рукоятку, направляющую трубку, тягу и стержень с конической винтовой нарезкой (см. описание к авторскому свидетельству СССР N 1316665. 1987 г.).
Недостатком известного инструмента является то, что стержень с конической винтовой нарезкой имеет по отношению к рукоятке корпуса только одно положение, что вызывает необходимость во время хирургической операции поворачивать весь манипулятор вокруг оси, изменяя положение рукоятки корпуса по отношению к руке хирурга и. тем самым, значительно усложняя его функциональные манипуляции.
Задача, на которую направлено заявленное изобретение, заключается в создании такого маточного манипулятора, который упрощает проведение хирургической операции и облегчает работу хирурга.
Техническим результатом заявленного изобретения является снижение травматичности при операции за счет улучшенного взаимодействия его рабочей части с окружающими тканями и сокращение операционного времени за счет удобства работы с предлагаемым инструментом.
Сущность изобретения заключается в том, что маточный манипулятор содержит корпус, неподвижную рукоятку, направляющую трубку, тягу и стержень с конической винтовой нарезкой.
В отличие от ближайшего аналога заявляемый манипулятор дополнительно содержит втулку с надувной, эластичной манжетой, ручку для попеременной флексии матки в двух взаимно перпендикулярных плоскостях и закрепленную на направляющей трубке съемную ручку, положение которой показывает, в какой плоскости и в какую сторону осуществляется угловое перемещение стержня с конической винтовой нарезкой при манипуляциях.
Стержень с конической винтовой нарезкой имеет ось вращения в вилке направляющей трубки и соединен рычагами с тягой и ручкой для попеременной флексии матки. Направляющая трубка установлена с возможностью поворота, зафиксирована от осевой расстыковки с корпусом и имеет возможность фиксации в двух взаимно перпендикулярных плоскостях стержнем пружинного фиксатора, закрепленного на корпусе. При этом стержень с конической винтовой нарезкой имеет возможность поворота на угол до 60o в двух взаимно- перпендикулярных плоскостях и четырех направлениях соответственно положению направляющей трубки.
Приведенная совокупность существенных признаков позволяет получить технический результат изобретения во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
В частных случаях своего выполнения или использования маточный манипулятор может содержать направляющую трубку, зафиксированную винтом от осевой расстыковки с корпусом, а также подвижную трубку с полусферой.
Причинно-следственная связь перечисленных признаков с вышеуказанным техническим результатом заключается в том, что втулка с надувной, эластичной манжетой позволяет осуществить обтюрацию влагалища, не прибегая к использованию других инструментов, что существенно упрощает операцию и сокращает время ее проведения.
Неподвижная рукоятка позволяет удобно удерживать манипулятор при проведении операции, в то время как наличие в этом инструменте ручки для попеременной флексии матки в двух взаимно перпендикулярных плоскостях позволяет перемещать и удерживать матку в нужном операционном положении.
Наличие на направляющей трубке съемной ручки не только облегчает управление инструментом, но и позволяет контролировать положение рабочей части манипулятора, которая представляет собой стержень с конической винтовой нарезкой.
Стержень с конической винтовой нарезкой позволяет вводить манипулятор в цирвикальный канал матки, фиксируя прилегающие к нему ткани.
Расположение оси вращения стержня с конической винтовой нарезкой в вилке направляющей трубки и его соединение рычагами с тягой и ручкой, предназначенной для попеременной флексии матки, позволяет преобразовать продольное вдоль направляющей трубки движение тяги в угловое перемещение стержня с конической винтовой нарезкой на угол до 60o.
Предельный угол 60o установлен экспериментально и обусловлен анатомическими особенностями женского организма.
Перемещение стержня с конической винтовой нарезкой в четырех направлениях соответственно положению направляющей трубки, которая имеет возможность фиксации в двух взаимно перпендикулярных плоскостях, также снижает травматичность от инструмента и позиционирует матку в строго определенных положениях.
Фиксация направляющей трубки винтом от осевой расстыковки с корпусом является наиболее простым и надежным исполнением такого соединения, а наличие в инструменте подвижной трубки и выполнение подвижной трубки с полусферой позволяет получить улучшенный обзор за счет отвода тканей в нужном направлении, т.е. использовать полусферу как элемент подъемника.
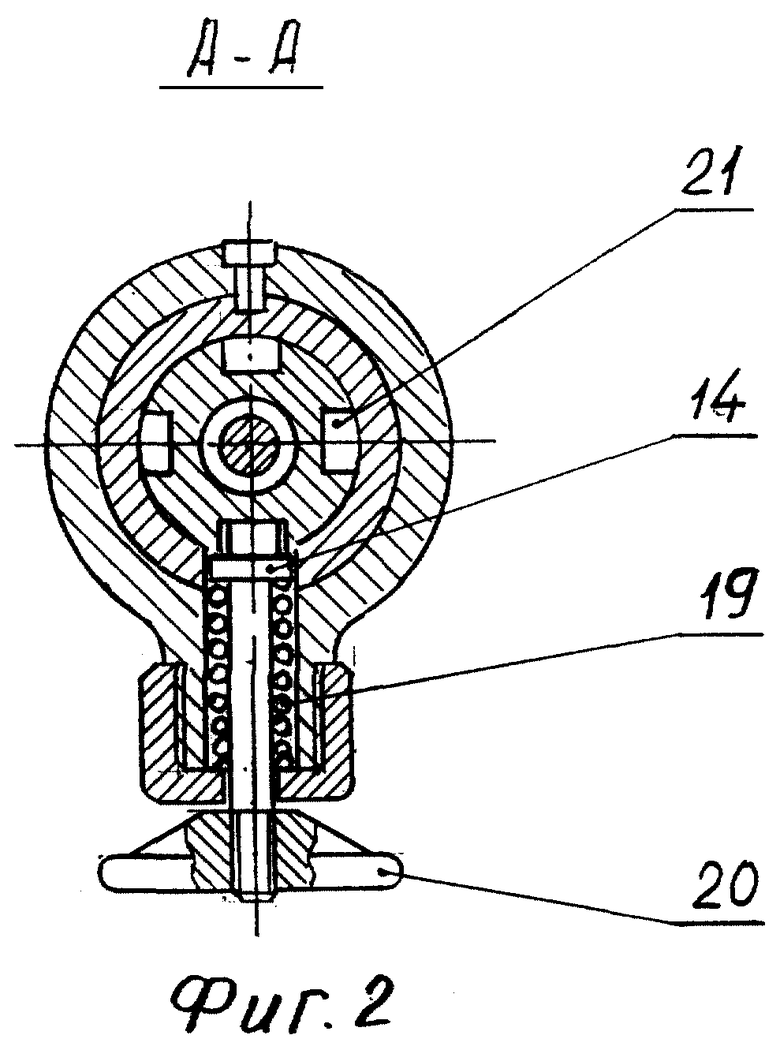
Сущность изобретения поясняется чертежом, где на фиг. 1 изображен манипулятор маточный, вид сбоку, и на фиг. 2 - разрез А-А, показанный на фиг. 1.
Манипулятор маточный содержит корпус 1, неподвижную рукоятку 2, направляющую трубку 3, тягу 4 и стержень 5 с конической винтовой нарезкой. Далее манипулятор содержит втулку 6 с надувной, эластичной манжетой 7, ручку 8 для попеременной флексии матки в двух взаимно перпендикулярных плоскостях и закрепленную на направляющей трубке 3 съемную ручку 9, положение которой показывает в какой плоскости и в какую сторону при манипуляциях осуществляется угловое перемещение стержня 5 с конической винтовой нарезкой.
Стержень 5 с конической винтовой нарезкой имеет ось вращения 10 в вилке 11 направляющей трубки 3 и соединен рычагами 12 с тягой 4 и ручкой 8 для попеременной флексии матки.
Направляющая трубка 3 установлена с возможностью поворота, зафиксирована винтом 13 от осевой расстыковки с корпусом 1 и имеет возможность попеременной фиксации в двух взаимно перпендикулярных плоскостях стержнем 14 пружинного фиксатора 15, закрепленного на корпусе 1.
Стержень 5 с конической винтовой нарезкой имеет возможность поворота на угол до 60o (см. фиг. 1) в четырех направлениях соответственно положению направляющей трубки 3, с которой может быть соединена подвижная трубка 16 с полусферой 17, расположенной на втулке 18.
Пружинный фиксатор 15 (см. фиг. 2) может содержать, кроме стержня 14, пружину 19 и кнопку 20, причем стержень 14 может взаимодействовать с четырьмя пазами 21, выполненными на направляющей трубке 3 с угловым шагом расположения 90o.
Работают маточным манипулятором следующим образом: стержень 5 с конической винтовой нарезкой первоначально ориентируется вдоль продольной оси направляющей трубки 3. Затем стержень 5 вкручивается в цервикальный канал матки, фиксируя прилегающие к стержню 5 ткани. Далее при лигировании маточных сосудов производится флексия матки попеременно в двух взаимно перпендикулярных плоскостях и четырех направлениях.
Манипуляции маткой осуществляются перемещением ручки 8, которая через тягу 4 соединена с рычагами 12, которые, в свою очередь, позволяют преобразовать продольное вдоль направляющей трубки 3 движение тяги 4 в угловое перемещение стержня 5, имеющего коническую винтовую нарезку.
Закрепленная на направляющей трубке 3 съемная ручка 9 позволяет упростить поворот направляющей трубки 3 относительно корпуса 1, а также проконтролировать, в какой плоскости и в какую сторону осуществляется угловое перемещение стержня 5 при манипуляциях.
Для осуществления осевого поворота направляющей трубки 3 относительно корпуса 1, а следовательно, и стержня 5, кнопкой 20 оттягивают стержень 14 пружинного фиксатора 15 и выводят стержень 14 из соответствующего паза 21.
Четыре паза 21 выполнены на направляющей трубке 3 с угловым шагом в 90o и фиксация трубки 3 в новом положении осуществляется автоматически под воздействием на стержень 14 пружины 19 при отпускании кнопки 20. При этом стержень 5 с конической винтовой нарезкой всегда устанавливается в выбранной плоскости, так как четыре положения его углового перемещения соответствуют положению направляющей трубки 3 относительно корпуса 1.
Поскольку съемная ручка 9 закреплена на направляющей трубке 3 и поворачивается вместе с трубкой, то по ее положению можно легко и точно определить в какой плоскости и в какую сторону осуществляется угловое перемещение стержня 5 с конической винтовой нарезкой, и, тем самым, определяется и положение матки.
При необходимости в качестве подъемника тканей используют подвижную трубку 16 с полусферой 17, которой осуществляют отвод этих тканей в нужном направлении. Кроме того, в процессе операции при необходимости используют надувную, эластичную манжету 7, размещенную на втулке 6.
Надувная, эластичная манжета 7 позволяет осуществить надежную обтюрацию влагалища, не прибегая к использованию других инструментов, существенно упрощая операцию и сокращая время ее проведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР МАТОЧНЫЙ | 1999 |
|
RU2167623C2 |
| МАНИПУЛЯТОР МАТОЧНЫЙ | 2006 |
|
RU2311883C1 |
| ЭКСТРАКТОР ВЛАГАЛИЩНЫЙ | 2001 |
|
RU2197187C2 |
| ВЛАГАЛИЩНЫЙ ОБТЮРАТОР | 2001 |
|
RU2197188C2 |
| ВЛАГАЛИЩНЫЙ ОБТЮРАТОР | 2005 |
|
RU2290111C1 |
| ГИЛЬЗА ТРОАКАРА | 2005 |
|
RU2288655C1 |
| КЛАПАН ДЛЯ ТРОАКАРА (ВАРИАНТА) | 2006 |
|
RU2322200C1 |
| АКУШЕРСКО-ГИНЕКОЛОГИЧЕСКИЙ ПРИБОР ДЛЯ ОКАЗАНИЯ ПОМОЩИ БОЛЬНЫМ НАЧАЛЬНОГО ПОСЛЕРОДОВОГО ПЕРИОДА | 2009 |
|
RU2402292C1 |
| ГИНЕКОЛОГИЧЕСКОЕ УСТРОЙСТВО | 1992 |
|
RU2014804C1 |
| УСОВЕРШЕНСТВОВАННАЯ МЕТОДИКА ОПЕРАЦИИ КОЛЬПОПОЭЗА ИЗ ТАЗОВОЙ БРЮШИНЫ С ЛАПАРОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ | 2015 |
|
RU2587723C1 |
Изобретение относится к хирургическим инструментам и может быть использовано в гинекологии, например, для проведения лапароскопической гистерэктомии. Манипулятор маточный содержит корпус, неподвижную рукоятку, направляющую трубку, тягу и стержень с конической винтовой нарезкой. Манипулятор дополнительно содержит втулку с надувной, эластичной манжетой, ручкой для попеременной флексии матки в двух взаимно перпендикулярных плоскостях и закрепленную на направляющей трубке съемную ручку. Положение ручки показывает, в какой плоскости и в какую сторону осуществляется угловое перемещение стержня с конической винтовой нарезкой при манипуляциях. Стержень имеет ось вращения в вилке направляющей трубки и соединен рычагами с тягой и ручкой для попеременной флексии матки. Направляющая трубка установлена с возможностью поворота, зафиксирована от осевой расстыковки с корпусом и имеет возможность попеременной фиксации в двух взаимно перпендикулярных плоскостях стержнем пружинного фиксатора. Пружинный фиксатор закреплен на корпусе. Стержень с конической винтовой нарезкой имеет возможность поворота на угол до 60° в двух взаимно перпендикулярных плоскостях и четырех направлениях соответственно положению направляющей трубки. В результате снижается травматичность при операции за счет улучшенного взаимодействия рабочей части манипулятора с окружающими тканями и сокращается операционное время за счет удобства работы с манипулятором. 2 з.п. ф-лы. 2 ил.
| Маточный интубатор | 1984 |
|
SU1316665A1 |
| US 4000743 A, 01.04.1977 | |||
| US 5840077 A, 21.11.1998 | |||
| US 5556401 A, 17.09.1996. | |||

