Изобретение относится к области текстильного машиностроения, а более конкретно к устройству ремизоподъемной каретки ткацкого станка.
Более 85% ассортимента вырабатываемых в мире тканей производится на ткацких станках по способу ткачества с использованием тяжелых ремизных рам, приводимых в движение от кривошипов, кулачков или от ремизоподъемной каретки. Привод ремизных рам с кривошипами или кулачками применяется только в сфере производства тканей простейших переплетений, имея преимущество перед ремизоподъемными каретками в производительности. Рынок требует решения задачи по созданию такой ремизоподъемной каретки, которая охватывала бы всю область производства тканей простого и мелкоузорчатого переплетений.
Известен привод ремизных рам ремизоподъемной каретки, идею которого разработала фирма "Штойбли" (Швейцария) - головной патент Швейцарии N 531073, D 03 C 5/00, 07.11.70, а также отражающие развитие идеи патенты EP 0446155 A, 09.91, США 4924915, 15.05.90. Привод содержит модулятор скорости планетарного типа на входе движения от главного вала ткацкого станка в ремизоподъемную каретку, приводной вал и установленные на нем кривошипы рычажных передач к ремизным рамам ткацкого станка. Привод содержит также установленные между приводным валом и корпусом кривошипы с фиксаторами, не показанные в указанных патентах, управляемые по заданной программе переплетения вырабатываемой ткани.
Механический способ действия привода ремизных рам, реализованный фирмой "Штойбли" в серийной продукции, моделирует технологию выработки ткани на ткацком станке с открытым зевом, а именно группа нитей основы вместе с ремизной рамой остается неподвижной в открытом зеве в течение целого числа циклов прокладки утка, или же движется в открытом зеве для того, чтобы изменить положение нитей основы относительно нити утка. Для того, чтобы воплотить указанный механический способ образования открытого зева на ткацком станке в конструкцию ремизоподъемной каретки, используются три органа: активно вращающийся приводной вал, пассивно вращающийся кривошип с фиксатором и корпус привода. Ремизная рама получает движение, если фиксатор блокирует кривошип с вращающимся приводным валом и остается неподвижной, если фиксатор блокирует вращающийся кривошип с корпусом привода. Для последующего движения ремизной рамы фиксатор должен разблокировать неподвижный кривошип от корпуса привода и вновь сблокировать его с вращающимся приводным валом. Ситуации при прямом и возвратном ходе фиксатора не являются тождественными с точки зрения оценки исходного механического состояния системы, однако обе ситуации, с целью исключения ударов на момент сцепления фиксатором вращающегося приводного вала или неподвижного корпуса привода ремизных рам, требуют снижения до нулевого уровня скорости вращения приводного вала.
Основной недостаток известного привода состоит в том, что глубокая модуляция скорости вращения его приводного вала приводит к невосполнимым потерям времени на фазах движения, а блокировка ремизных рам в неподвижном открытом зеве вызывает разрыв циклов их движения. В данном приводе полностью не выполнено основное требование, предъявляемое к ротационным машинам, а именно отсутствует непрерывность движения при выполнении основных технологических операций: движения и блокировки ремизных рам в открытом зеве. Следовательно, известный привод не может быть классифицирован в качестве ротационного исходя только из формального признака - цилиндрической формы составляющих его деталей. Указанный недостаток невозможно устранить без изменения способа действия конструкции.
Недостатки рабочих параметров известного привода являются следствием несовершенства его принципиальной функциональной схемы.
Высокий уровень ускорений движения ремизных рам определен нулевыми начальными условиями их движения - ремизные рамы начинают свое движение из состояния покоя, а время движения ограничено глубокой модуляции скорости, и как следствие этих причин, уровень расчетных кинематических ускорений ремизных рам превышает более чем в два раза физически достижимый.
Низкий скоростной режим известного привода связан с его перегрузкой инерционными силами, повышенным уровнем вибраций, параметрически возбуждаемых модуляций скорости.
Сочетание в паре активного (приводного вала) и пассивного (кривошипа) органов снижает управляемость системы, что привело в известном приводе ремизных рам к использованию ударной схемы перемещения фиксаторов, жестких пружин для блокировки ремизных рам в открытом зеве и жестких упоров фиксаторов. Другим недостатком известного привода является незначительный диапазон варьирования законом движения ремизных рам, особенно в направлении получения коротких фаз выстоя ремизных рам в открытом зеве, в связи с чем, известные ремизоподъемные каретки с модулятором скорости существенно (до 50%) снижают скоростные характеристики современных бесчелночных ткацких станков.
Известен привод ремизных рам ротационной ремизоподъемной каретки (патент РФ N 2001169, 02.10.92, международная заявка PCT/RU 93/00028, 04.02.93, международная публикация WO 94/08081, 14.04.94), содержащий кривошип рычажной передачи к ремизной раме, связанный зубчатой передачей с водилом планетарной муфты включения, установленной на приводном валу ремизоподъемной каретки и взаимодействующей коронным колесом и водилом с программным устройством посредством пары фиксаторов, установленных на приводном валу с возможностью качательного движения относительно его оси посредством кулачков. Приводной вал установлен с возможностью однонаправленного равномерного вращения, а планетарная муфта включения соединена с кривошипом с помощью водила. Блокировка соответствующим фиксатором водила или коронного колеса планетарной муфты включения производится в процессе одновременного вращения водила и коронного колеса и соответственно качательных движений обоих фиксаторов.
В указанном приводе реализован основной признак ротационных машин - операции блокировки и движения ремизных рам производятся при непрерывном вращении приводного вала, водила, коронного колеса и их фиксаторов, при этом ремизная рама в положении открытого зева получает малые перемещения, не оказывающие вредного действия на процесс ткачества. Блокировка фиксаторами планетарной муфты включения производится безударно в момент вращения фиксаторов относительно оси приводного вала с максимальной скоростью. Оба блокируемых фиксаторами органа: коронное колесо и водило являются активно движущимися органами, несущими моментную нагрузку, что обеспечивает повышенную управляемость муфты. Фиксаторы после начального толчка от программного устройства в дальнейшем движутся при сопутствующем воздействии на них планетарной муфты включения.
Низкий уровень ускорений ремизных рам, близкий к физическому пределу, достигнут за счет того, что в начальный момент своего движения массы ремизной рамы уже обладают начальной скоростью, а для перемещения ремизной рамы используется время полного цикла работы привода. За счет перехода на принципиально новую схему привода с непрерывным ротационным способом формирования открытого зева открывается возможность по сравнению с известными ремизоподъемными каретками снизить расчетные инерционные нагрузки на ремизных рамах более чем в два раза и за счет этого в 5...6 раз повысить ресурс работы зевообразующего механизма ткацкого станка. Отсутствие модуляции скорости, как источника возбуждения вибраций, жесткая кинематическая блокировка ремизных рам в открытом зеве, возможность безударного управления фиксаторами, низкие нагрузки на фиксаторах - все это создает условия для устойчивого управления приводом при рабочих частотах более 1000 циклов прокладки утка в минуту.
Недостаток данного привода состоит в том, что планетарная муфта совместно с кулачками выполняет одновременно две важнейшие функции, во-первых, обеспечивает безударное исполнение программы движения и блокировки ремизных рам в соответствии с раппортом переплетения вырабатываемой на ткацком станке ткани и, во-вторых, задает закон движения ремизных рам. Совмещение двух функций в одном органе затрудняет получение оптимальных параметров по каждой функции в отдельности. Например, затруднено получение законов движения ремизных рам с длительной фазой выстоя в открытом зеве.
Кроме того, реализация качательного движения одновременно фиксаторов водил и коронных колес усложняет конструкцию привода, при этом снижается жесткость установки фиксаторов коронных колес, размещенных на общей подвижной оси, воспринимающей максимальные нагрузки от движущихся в открытом зеве ремизных рам.
Цель предлагаемого изобретения - расширение технологических возможностей привода ремизных рам за счет применения циклограмм их движения с длительной фазой выстоя в открытом зеве, а также повышение надежности конструкции привода.
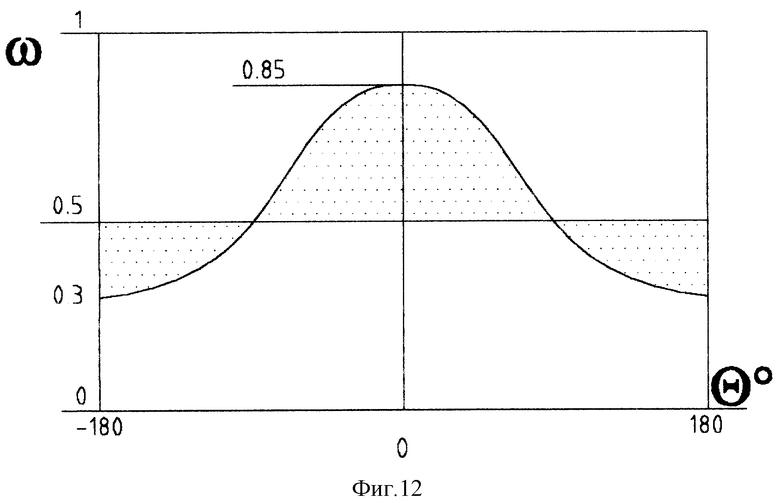
Указанная цель достигается тем, что в известном приводе ремизных рам ротационной ремизоподъемной каретки, содержащем связанный кинематической передачей с главным валом ткацкого станка приводной вал, установленный в корпусе привода ремизных рам, на котором по числу ремизных рам установлены планетарные муфты включения, взаимодействующие каждая посредством водила, коронного колеса и установленных на осях поворота пары фиксаторов с программным устройством и с кривошипом рычажной передачи к ремизной раме, его приводной вал связан с главным валом ткацкого станка посредством механизма коррекции скорости вращения, выполненного в виде кривошипно-кулисного механизма с вращающейся кулисой; ось поворота каждого фиксатора коронного колеса посредством кронштейна закреплена на массивной балке, жестко скрепленной с корпусом привода ремизных рам, а ось поворота каждого фиксатора водила посредством своего кронштейна закреплена на легкой балке, имеющей возможность качательного движения относительно оси приводного вала, при этом планетарные муфты включения выполнены взаимопроникающими друг в друга, приводной вал выполнен зубчатым, водило монолитно связано с кривошипом рычажной передачи к ремизной раме и установлено на приводной вал посредством роликового подшипника и шлицевой втулки, коронное колесо посажено свободно на кольцо с клиньями, разделяющими на приводном валу шлицевые втулки и роликовые подшипники водил соседних планетарных муфт, сателлиты снабжены демпфирующими кольцами и размещены в пространствах между клиньев кольца, торцевые поверхности водила и кольца с клиньями снабжены кольцевыми канавками для помещения в них шариков, разделяющих соседние планетарные муфты, сжатые усилием тарельчатых пружин; фиксаторы водила и коронного колеса связаны между собой трехплечим рычагом управления, взаимодействующим с программным устройством; механизм коррекции скорости вращения может быть выполнен в виде некруглых зубчатых колес(одно из которых может быть круглым) или в виде планетарных механизмов по типу известных модуляторов скорости с максимальным отклонением скорости вращения кривошипа рычажной передачи к ремизной раме относительно средней скорости за цикл на величину не более 30%.
Сущность предлагаемого изобретения состоит в том, что оптимальные кинематические законы движения ремизных рам на современных бесчелночных ткацких станках близки к закону, создаваемому равномерно вращающимся кривошипом, и для достижения оптимальных законов движения ремизных рам достаточно произвести малую коррекцию скорости вращения кривошипов. Безударная блокировка фиксаторами водила и коронного колеса планетарной муфты включения обеспечивается колебательным вращением относительно оси приводного вала только малонагруженного фиксатора водила. Фиксатор коронного колеса, воспринимающий основную нагрузку от ремизных рам, жестко закреплен своей осью на корпусе привода.
Планетарная муфта обеспечивает программное включение движения ремизной рамы и ее блокировку с малыми перемещениями в открытом зеве, механизм коррекции скорости вращения обеспечивает оптимальный закон движения ремизных рам в открытом зеве. Выбор закона движения ремизных рам определен исключительно технологическими требованиями выработки ткани на ткацком станке и не ограничен какими-либо дополнительными условиями по обеспечению функционирования механизмов самого привода.
Кинематические характеристики двух процессов: малых перемещений ремизной рамы в положении открытого зева и движения ремизной рамы при открытии нового зева переходят без разрыва друг в друга, что обуславливает мягкие динамические режимы работы системы "привод - ремизная рама" при высоких скоростях работы ткацкого станка.
Предлагаемое изобретение раскрывает также новые компоновочные решения и конструкцию важнейших механизмов привода ремизных рам с функциональными признаками, позволяющими характеризовать его по способу действия в качестве ротационного.
На фиг. 1 изображен общий вид ремизных рам в разрезе его корпуса плоскостью, проходящей в направлении валов и осей.
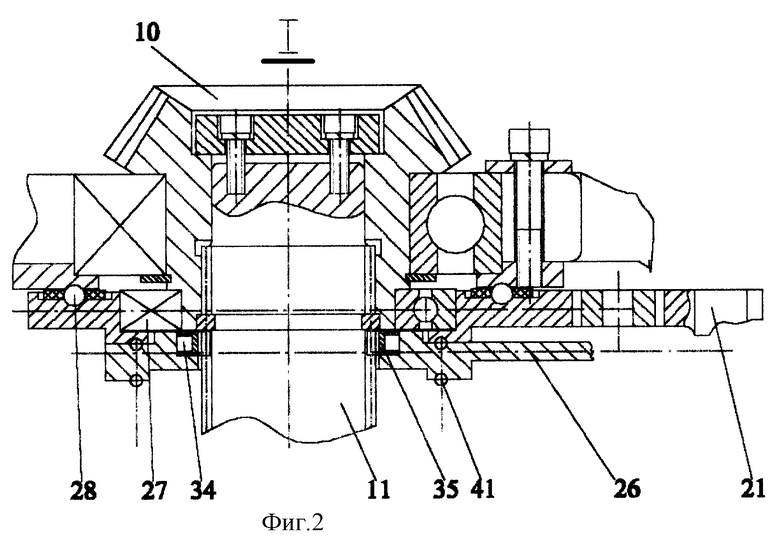
На фиг. 2 - головная часть приводного вала привода в увеличенном масштабе изображения.
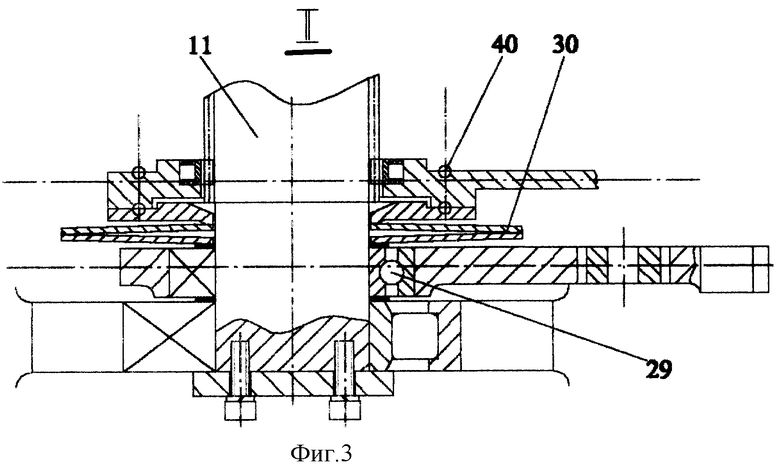
На фиг. 3 - хвостовая часть приводного вала привода в увеличенном масштабе изображения.
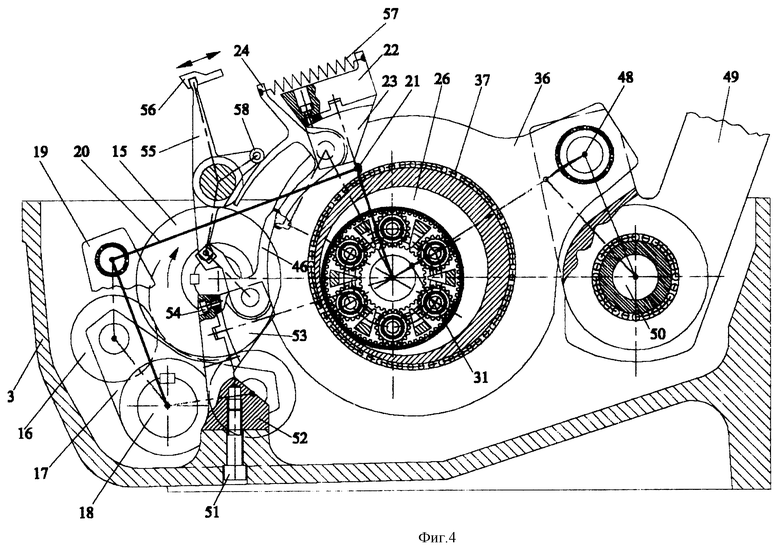
На фиг. 4 - разрез привода плоскостью, перпендикулярной к его осям и валам.
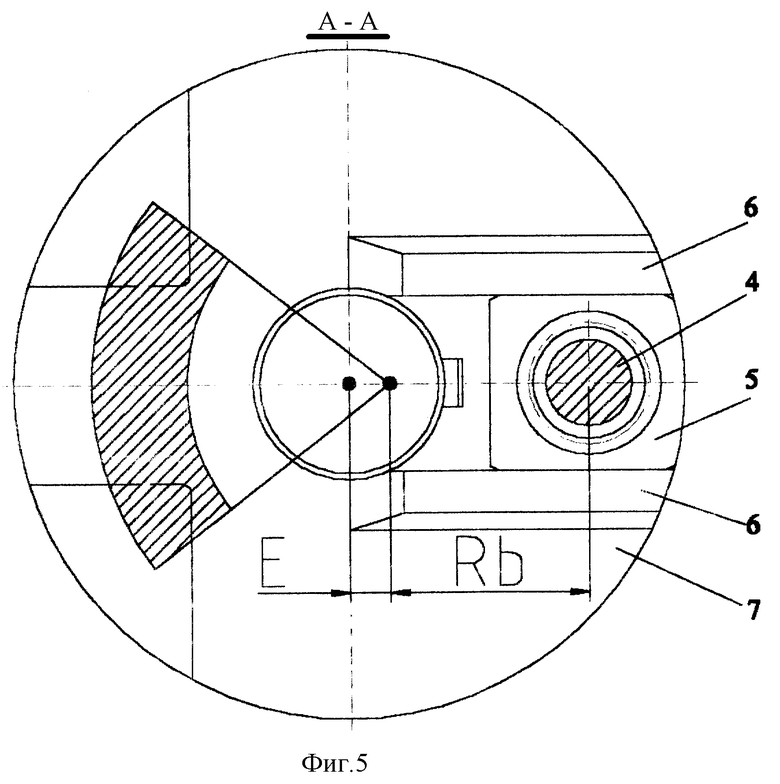
На фиг. 5 - механизм коррекции скорости вращения в виде кривошипно-кулисного механизма с вращающейся кулисой при взгляде со стороны ведущего вала привода в направлении вала кулисы.
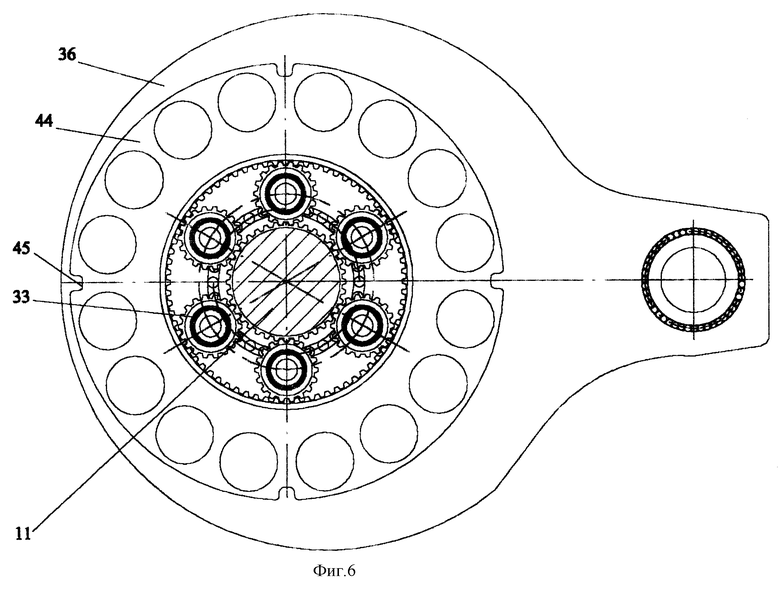
На фиг. 6 - общий вид планетарной муфты включения при условно удаленной опоре коронного колеса - кольца с клиньями.
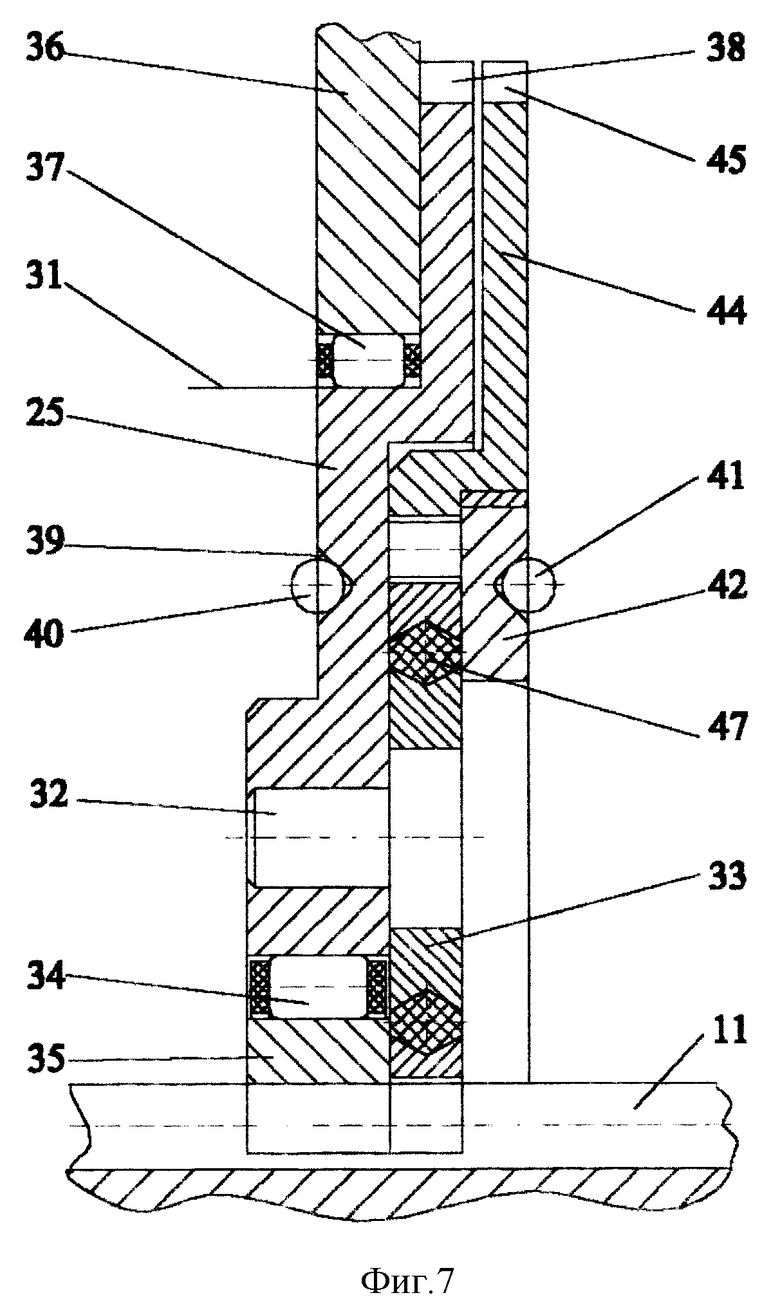
На фиг. 7 - поперечный разрез планетарной муфты включения.
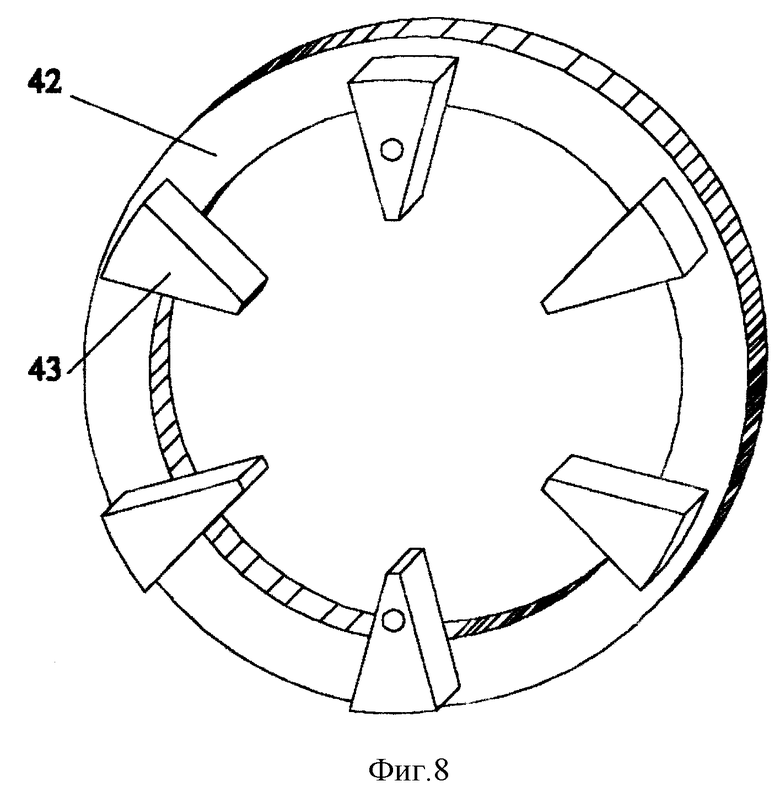
На фиг. 8 - объемное изображение кольца с клиньями.
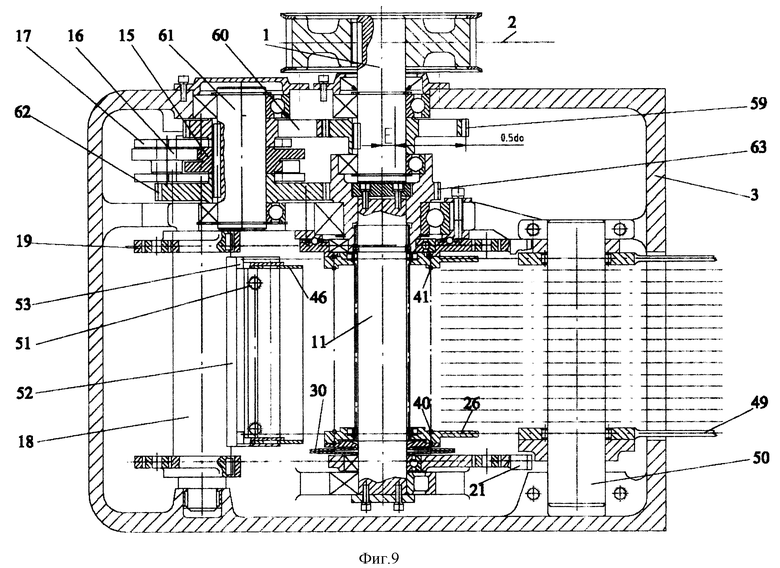
На фиг. 9 - общий вид привода ремизных рам в варианте компоновки с механизмом коррекции скорости вращения в виде некруглых зубчатых колес.
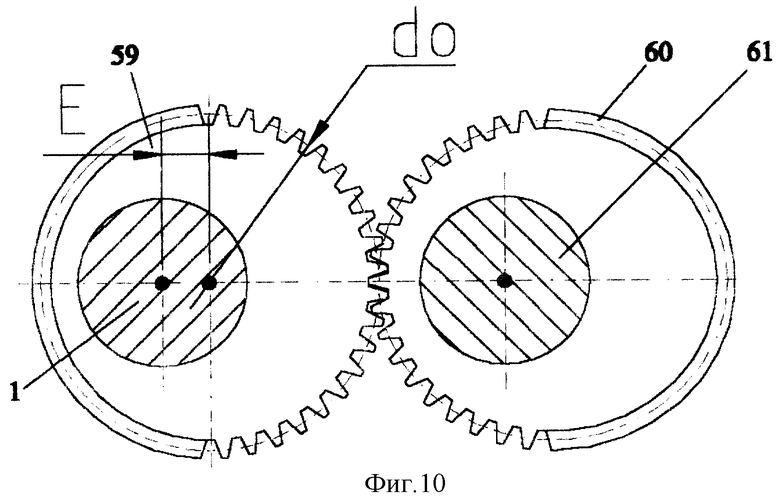
На фиг. 10 - механизм коррекции скорости вращения в виде пары зубчатых колес, из которых одно круглое эксцентрично смещенное относительно оси своего вращения, а противоположное - некруглое.
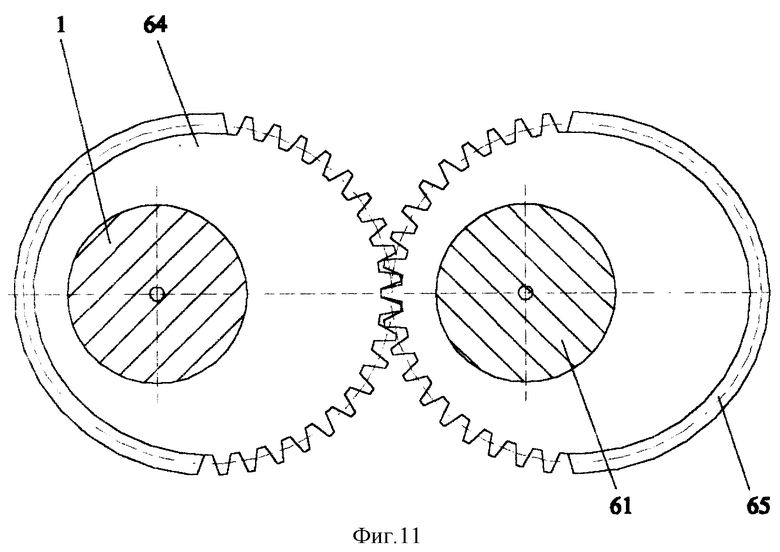
На фиг. 11 - механизм коррекции скорости вращения в виде пары некруглых зубчатых колес.
На фиг. 12 - график изменений угловых скоростей вращения ω кривошипа рычажной передачи к ремизной раме в зависимости от изменений углов поворота θ ведущего вала привода.
Привод ремизных рам ротационной ремизоподъемной каретки содержит ведущий вал 1, связанный кинематической передачей 2 с главным валом ткацкого станка, установленный вращательно в корпусе 3 привода и несущий на себе кривошип 4 кривошипно-кулисного механизма (фиг.5), связанный посредством камня 5 с кулисой 6, выполненной на планшайбе 7, закрепленной на валу 8. Валы 1 и 8 параллельны и смещены на величину эксцентриситета E, показанного на фиг. 5. Величина относительного эксцентриситета положения осей сопрягаемых валов, определяемая отношением абсолютных значений эксцентриситета E и радиуса Rb от оси вращения ведущего вала 1 до оси кривошипа 4, не превышает величины 0,4.
На противоположном относительно планшайбы 7 конце вала закреплен блок конических шестерен, из которых коническая шестерня 9 посредством конической шестерни 10 связана с приводным валом 11, а коническая шестерня 12 связана посредством шестерни 13, вала 14, кулачков 15, роликов 16, коромысла 17, вала 1 и закрепленных на валу 18 пары рычагов 19 и связанных с ними звеньев 20 с качалками 21 легкой балки 22 (фиг. 4), несущей с помощью кронштейнов 23 фиксаторы 24 водил 25 (фиг. 7) планетарной муфты включения 26, изображенной отдельно на фиг. 6, 7, 8. Качалки 21 установлены на приводном валу 11 посредством подшипников качения 27, 28, 29 и тарельчатых пружин 30.
Планетарная муфта включения 26 содержит водило 25, несущее на себе кривошип 31, оси 32 сателлитов 33, подшипник 34, шлицевую втулку 35 для посадки на зубья приводного вала 11 и шатун 36 с подшипником 37. На водиле 25 выполнены лунки 38 для сцепления с фиксатором 24 (фиг. 4), а также на его торцевой поверхности выполнена канавка 39 для помещения в нее шариков 40. К внутренней плоскости водила 25 усилием тарельчатых пружин 30 посредством шариков 41 прижато кольцо 42 с клиньями 43, которое служит опорой вращения для коронного колеса 44, сцепленного своим зубчатым венцом с сателлитами 33 и выполненного с лунками 45 для сцепления с фиксатором 46 (фиг. 1, 4). Сателлит 33 содержит демпфирующее кольцо 47, выполненное из синтетического материала с целью выравнивания нагрузок между сателлитами и гашения пиковых нагрузок. Сателлиты 33 установлены в пространстве между клиньев 43 кольца 42 и внутренней плоскостью водила 25.
Каждая планетарная муфта 26, установленная на приводном валу 11 посредством шлицевой втулки 35, роликового подшипника 34, упорных подшипников 40, 41 и тарельчатых пружин 30, своим шатуном 36, установленным вращательно на кривошип 31, связана с рычажной передачей 48 к ремизной раме ткацкого станка, приводной рычаг 49 которой установлен вращательно на оси 50.
В корпусе 3 винтами 51 закреплена массивная балка 52, несущая на себе фиксаторы 46 коронных колес 44, установленные поворотно на кронштейнах 53, закрепленных винтами 54 на массивной балке 52.
Планетарная муфта 26 взаимодействует лунками 38, 45 соответственно водила 25 и коронного колеса 44 (фиг. 7), посредством фиксаторов 24, 46 и трехплечего рычага управления 55 с тяговым органом 56 программного устройства, при этом фиксатор 24 прижат усилием пружины 57 к ролику 58 рычага управления 55.
На фиг. 9 представлен вариант компоновки привода с боковым расположением кинематической передачи к главному валу ткацкого станка. Привод содержит на приводном валу 1 круглое колесо 59, смещенное относительно оси своего вращения на величину эксцентриситета E, сцепленное с некруглым зубчатым колесом 60 (фиг. 10), установленным на валу 61, несущем кулачок 15 для привода в движение легкой балки 22 с фиксаторами 24 водил 25 планетарных муфт 26 и зубчатое колесо 62 для передачи вращения посредством шестерни 63 приводному валу 11. Из семейства зубчатых пар в приводе ремизных рам применяются только такие, у которых величина относительного эксцентриситета круглого колеса, определяемого отношением абсолютной величины эксцентриситета E к диаметру do делительной окружности колеса, не превышает величины 0,2.
На место пары зубчатых колес 59, 60 может быть установлена пара некруглых зубчатых колес 64, 65 (фиг. 11) с отношением максимального радиуса ведущего колеса 64 к минимальному радиусу ведомого колеса 65 в пределах до значения 1,7.
Привод ремизных рам работает следующим образом.
Вращение от главного вала ткацкого станка поступает через кинематическую передачу 2 на ведущий вал 1 привода и далее: от конического колеса 12 передается кулачку 15, сообщающему качательное движение валу 18, рычагам 19 и качалкам 21 с установленной на них легкой балкой 22 с фиксаторами 24 водил 25 планетарных муфт 26; от конического колеса 9 вращение поступает на приводной вал 11 и соответственно планетарным муфтам 26, установленным на нем.
В том случае если тяговый орган 56 фиксирует правое крайнее положение поворота трехплечего рычага управления 55, то ролик 58 удерживает фиксатор 24 в положении блокировки лунки 38 водила 25, а лунка 45 коронного колеса 44 в этот момент освобождена фиксатором 46. Качательное движение водила 25 и вместе с ним кривошипа 31 вызывает покачивание с малой амплитудой рычажной передачи 48, приводного рычага 49 и соответственно ремизной рамы в ее верхнем или нижнем положении. Вращение водила 25, достигающее максимальной скорости в среднем положении движения фиксатора 24, планетарно передается коронному колесу 44, и данный момент соответствует мгновенной остановке лунки 45 последнего относительно его неподвижного фиксатора 46 - необходимое условие безударной блокировки.
В том случае, если тяговый орган 56 фиксирует левое крайнее положение поворота трехплечего рычага управления 55, то фиксатор 24 покидает лунку 38 водила 25, а фиксатор 46 блокирует лунку 45 коронного колеса 44. Вращение главного вала ткацкого станка, скорректированное кривошипно-кулисным механизмом (фиг. 1, 5) или некруглыми зубчатыми колесами (фиг. 9, 10, 11, 12), в соответствии с заданным законом движения ремизных рам, поступает на приводной вал 11, водила 25 с кривошипами 31, приводящими в движение ремизные рамы в открытом зеве. В крайних положениях ремизных рам выравниваются угловые скорости вращения фиксаторов 24 и водил 25, что обеспечивает последующую их безударную блокировку, после которой плавное замедление движущимися фиксаторами 24 водил 25 приводит к плавному разгону легких коронных колес 44 и к блокировке ремизных рам в крайних положениях, сопровождаемой малыми перемещениями.
Таким образом, силовая цепь к ремизным рамам постоянно находится в движении с малыми или большими амплитудами перемещения. Указанные режимы движения строго согласованы по условию плавности перехода их кинематических характеристик из одной картины движения в другую.
Идея непрерывного ротационного способа формирования открытого зева проверена экспериментально на рабочем макетном образце, прошедшем испытания в России и на ведущей в мире фирме - потребителе ремизоподъемных кареток. В настоящее время на основе материала данного предлагаемого изобретения выполнены разработки серийной конструкции ротационной ремизоподъемной каретки нового поколения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕМИЗНЫХ РАМ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ | 2003 |
|
RU2232833C1 |
| Ротационная ремизоподъемная каретка ткацкого станка | 1986 |
|
SU1647049A1 |
| Ремизоподъемная каретка ткацкого станка | 1986 |
|
SU1331920A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1988 |
|
SU1527338A1 |
| Ремизоподъемная каретка для ткацкого станка | 1977 |
|
SU749954A1 |
| Привод ремизоподъемной каретки ткацкого станка | 1973 |
|
SU681125A1 |
| Механизм смены органов ремизоподьемной каретки к ткацкому станку | 1974 |
|
SU492607A1 |
| Механизм привода ремиз к ткацкому станку | 1971 |
|
SU675102A1 |
| Ремизоподъемная каретка ткацкого станка | 1985 |
|
SU1449598A1 |
Изобретение относится к области текстильного машиностроения и касается привода ремизных рам ремизоподъемной каретки, содержащего установленный в корпусе приводной вал, связанный кинематической передачей с главным валом ткацкого станка, на котором по числу ремизных рам установлены планетарные муфты включения, взаимодействующие каждая посредством водила, коронного колеса и установленных на осях поворота пары фиксаторов с программным устройством и с кривошипом рычажной передачи к ремизной раме. Ось поворота каждого фиксатора коронного колеса посредством кронштейна закреплена на балке, жестко скрепленной с корпусом привода ремизных рам, а ось поворота фиксатора водила посредством своего кронштейна закреплена на балке, имеющей возможность качательного движения относительно оси приводного вала. Данное изобретение позволяет расширить технологические возможности ремизоподъемных кареток и повысить их надежность. 5 з.п.ф-лы, 12 ил.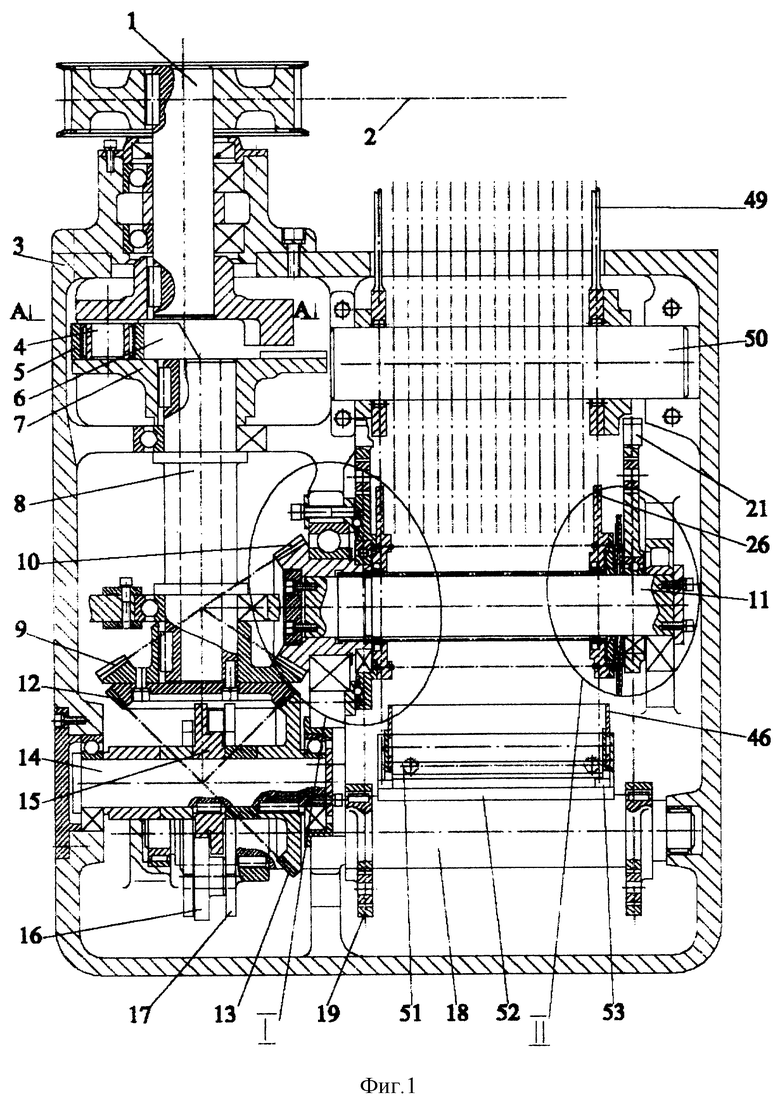
| Экономайзер | 0 |
|
SU94A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Привод высокоскоростной ротационной ремизоподъемной каретки | 1989 |
|
SU1724016A3 |
| Измеритель показателя тепловой инерции термодатчиков | 1975 |
|
SU525862A1 |
| Устройство для испытания тонких нитей на малоцикловую усталость | 1974 |
|
SU648876A1 |
| Устройство для переключения ремизоподъемной каретки ткацкого станка на обратный ход | 1986 |
|
SU1461781A1 |
| DE 36232016 C1, 03.09.1987. | |||

