Изобретение относится к области оптико-электронных систем управления и может быть использовано в оптических системах промышленного назначения, навигационных системах, системах слежения за космическими объектами, системах управления заходом на посадку и других системах аналогичного назначения.
Известна двухконтурная оптическая следящая система [1] с телевизионной передающей трубкой мгновенного действия типа диссектор, содержащая внутренний контур - электронную следящую систему и внешний электромеханический следящий контур.
Во внешнем контуре слежение осуществляется посредством перемещения телевизионной камеры приводом наведения.
Такая система, ввиду использования трубки мгновенного действия, характеризуется высокими динамическими характеристиками, но не может быть применена в качестве системы наведения на удаленные объекты. Это объясняется недостаточной для обнаружения и сопровождения удаленных объектов световой чувствительностью диссектора.
Известно также оптико-электронное устройство [2, стр. 110-112, рис. 3.23] , состоящее из связанных между собой оптико-электронного пеленгатора и привода с усилителем мощности. Эта система имеет входы приема оптического сигнала, внешнего целеуказания и коррекции. Разворот пеленгатора на объект в процессе сопровождения осуществляется приводом по сигналам от пеленгатора. Недостатком этой системы является отсутствие измерителей качек, что затрудняет использование этой системы на носителях, подверженных воздействию качек.
Известна также следящая система [2, стр. 228, 229, рис. 6.7], состоящая из последовательно соединенных датчика поступательного движения, вычислителя, гиростабилизатора, пеленгатора и усилителя мощности, выход которого соединен со вторым входом гиростабилизатора. Данная система позволяет осуществлять работу с качающегося основания. Однако в связи с тем, что для стабилизации используется гиропривод, отсутствует практическая возможность стабилизации массивных оптических приборов, т.е. приборов с большими фокусными расстояниями и диаметрами входного зрачка. Это не позволяет обеспечить сопровождение объектов, находящихся на большой дальности, либо имеющих малый контраст относительно фона.
Наиболее близкой к предлагаемому изобретению является телевизионная система со следящим стробом [3, стр. 232, рис. 7.17], содержащая последовательно включенные телевизионную камеру (оптико-электронный блок), устройство обработки видеосигнала, решающее устройство, электронный интегратор, привод наведения (исполнительное устройство), выходной вал которого через механическую передачу соединен с телевизионной камерой, а также задающее устройство, вход которого соединен с выходом электронного интегратора, а выход - со вторым входом решающего устройства.
Устройство обработки видеосигнала, решающее устройство, электронный интегратор и задающее устройство в совокупности представляют собой блок определения координат объекта относительно растра.
В такой системе с передающей трубкой типа видикон, обладающей высокой световой чувствительностью, может быть обеспечено сопровождение малоконтрастных целей при сравнительно низкой освещенности.
Недостатком таких систем является падение разрешающей способности системы при значительных скоростях перемещения телевизионной камеры относительно цели, что обуславливается "смазыванием" изображения на фотокатоде телевизионной передающей трубки [4, стр. 170]. Недостаточно высокая разрешающая способность и, естественно, точность при сопровождении высокоскоростных целей с качающегося основания вызывается отсутствием системы стабилизации и недостаточным быстродействием элементов, что приводит к большим динамическим ошибкам электромеханического контура и, соответственно, высоким скоростям перемещения телевизионной камеры относительно цели. Кроме того при "смазе" изображения изменяется образ объекта, что может вызвать срыв сопровождения и приводит к дополнительным ошибкам при определении координат объекта, даже если срыв не произошел, уменьшается контраст изображения объекта относительно изображения фона, что уменьшает дальность сопровождения объекта. Аналогично, такие же недостатки имеют место, если вместо видикона используется другой приемник с накоплением, либо с целью повышения отношения сигнал/шум используются иные способы накопления сигнала.
Задачей предлагаемого технического решения является обеспечение устойчивости сопровождения следящей системы при работе с качающегося основания при одновременном увеличении дальности действия, а также повышение точности определения координат.
Решение указанной задачи достигается за счет того, что в оптико-электронную следящую систему, содержащую последовательно включенные исполнительное устройство, оптико-элекронный блок и блок определения координат, введены последовательно соединенные первый преобразователь координат, коммутатор, корректирующее устройство и второй преобразователь координат, а также третий преобразователь координат. При этом второй выход исполнительного устройства соединен со входом третьего преобразователя координат, выход которого соединен со вторым входом блока определения координат. Выход второго преобразователя координат соединен со входом исполнительного устройства. Выход блока определения координат соединен со входом первого преобразователя координат. Второй вход коммутатора является входом связи с внешними системами, а второй вход блока определения координат служит для управления положением строба. Второй выход исполнительного устройства является выходом ошибки исполнительного устройства.
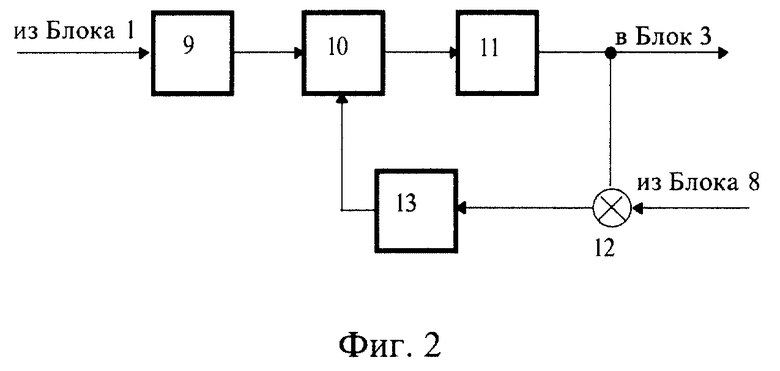
Все используемые для реализации заявляемого устройства блоки являются известными. В качестве оптико-электронного блока (ОЭБ) может быть использована телекамера, теплопеленгатор, тепловизор и т.п. Блок определения координат может быть реализован, как это указано на фиг. 2. При этом устройство обработки видеосигнала, электронный интегратор, решающее и задающее устройства могут быть реализованы, как это описано в [3, стр.223-225, 232-233] , а сумматор - аналогично описанному в [5]. Первый преобразователь координат служит для пересчета из измерительной системы координат ОЭБ в стабилизированную сферическую систему координат, второй преобразователь координат служит для пересчета из стабилизированной сферической системы координат в нестабилизированную сферическую систему координат исполнительного устройства (ИУ), третий преобразователь координат служит для пересчета из нестабилизированной сферической системы координат ИУ в измерительную систему координат ОЭБ. Преобразователи координат могут быть реализованы, как это описано в [6] . Корректирующее устройство (КУ) может быть реализовано, как это описано в [5], при этом вид КУ может быть выбран по правилам, описанным в [7], исходя из требований, предъявляемых к динамике оптико-электронной системы (ОЭС). Исполнительное устройство может быть реализовано как в прототипе либо, как это описано в [8]. Коммутатор может быть реализован на реле, герконах, полевых транзисторах, оптронах и т.п.
На фиг. 1 схематично изображена предлагаемая система. Система содержит последовательно соединенные оптико-электронный блок 1, блок определения координат 2, первый преобразователь координат 3, коммутатор 4, корректирующее устройство 5, второй преобразователь координат 6, исполнительное устройство 7, третий преобразователь координат 8. Выход исполнительного устройства 7 кинематически связан с оптико-электронным блоком 1, а выход третьего преобразователя координат 8 соединен со вторым входом блока определения координат 2. Второй вход коммутатора 4 служит для управления от внешних систем.
Работа системы осуществляется следующим образом. В начальный момент времени по сигналам от внешней системы, подаваемым на второй вход коммутатора 4, исполнительное устройство 7 разворачивает ОЭБ так, чтобы изображение объекта оказалось внутри строба. Оптическое изображение выбранного объекта сопровождения и прилегающего фона преобразуется с помощью ОЭБ 1 в видеосигнал. Если отношение сигнал/шум от объекта на выходе ОЭБ 1 превышает пороговое значение, блок определения координат 2 переходит в режим сопровождения объекта.
Работа ОЭБ и БОК синхронизирована между собой. При этом синхронизатор может располагаться либо в ОЭБ, либо в БОК, либо отдельно. Поскольку работа ОЭБ и БОК синхронизирована, имеет место однозначное соответствие между временным интервалом после синхроимпульса и положением изображения объекта в поле зрения ОЭБ (см., например, [2], стр. 109, 110). Видеосигнал поступает с выхода ОЭБ 1 на вход БОК 2, в котором определяется положение изображения объекта относительно центра растра. Для определения этих координат могут использоваться контрастные, корреляционные, пространственно-частотные алгоритмы, позволяющие выделить объект относительно фона, исходя из характерных особенностей его образа. Исходя из требований повышения помехозащищенности и минимизации времени, необходимого для определения координат, в каждом цикле производится обработка не всего видеосигнала, соответствующего полю зрения ОЭБ, а, его ограниченной части - строба. По результатам вычисления координат объекта в текущем цикле строб смещается таким образом, чтобы его центр совпал с центром изображения объекта, т.е. реализуется режим следящего строба.
При этом вход устройства обработки видеосигнала (УОВ) 9 является первым входом БОК. В УОВ осуществляется отсечка неинформативной части видеосигнала от уровней ниже минимального и выше максимального в текущем сигнале, привязка минимума к уровню "черного", а максимума к уровню "белого", растягивание оставшейся части на весь линейный диапазон канала передачи и, при необходимости, преобразование видеосигнала в цифровой код. В решающем устройстве (РУ) 10, во-первых, из сигнала, поступившего из УОВ, на основании информации от задающего устройства 13 выделяется часть, соответствующая стробу, и, во-вторых, рассчитывается положение изображения объекта относительно центра строба. В электронном интеграторе (ЭИ) 11 осуществляется накопление сигнала из решающего устройства 10, причем координата на выходе ЭИ отличается от координаты объекта относительно центра растра (поля зрения) на величину смещения, выдаваемого с третьего преобразователя координат (ПК3) 8. Выход ЭИ является выходом БОК. Выход электронного интегратора 11 соединен с первым входом сумматора 12, на второй вход которого поступает сигнал дополнительного смещения с ПК3. Второй вход сумматора 12 является вторым входом БОК. Сигнал с выхода сумматора 12 соответствует требуемому положению строба в очередном цикле. В задающем устройстве (ЗУ) 13 на основании информации от сумматора 12 определяются временные интервалы от начала цикла, соответствующие частям видеосигнала, составляющим стробируемый участок.
Таким образом, решающее устройство 10, электронный интегратор 11, сумматор 12 и задающее устройство 13 образуют замкнутый электронный контур слежения. Подробно назначение и описание указанных блоков даны в соответствующей литературе (см.[3], стр. 59-62, 215-225).
Сигнал с блока определения координат 2 поступает на первый преобразователь координат (ПК 1) 3. В нем координаты с выхода БОК пересчитываются в стабилизированную сферическую систему координат (СССК). При этом на выходе ПК1 формируется сигнал рассогласования в стабилизированной системе координат.
δεc = δεcosγ-δβsinγ, (1)
(1)
где δε, δβ - сигналы рассогласования в измерительной системе координат,
δεc, δβc - сигналы рассогласования в стабилизированной системе координат,
γ - угол скрутки измерительной системы координат.
(см. [6, стр. 58, формула 2.39]).
Сигнал с выхода первого преобразователя координат 3 поступает через коммутатор 4 на вход корректирующего устройства (КУ) 5, где реализуется закон управления с целью улучшения качества регулирования.
Напряжение с выхода корректирующего устройства 5 поступает на вход второго преобразователя координат (ПК2) 6. В ПК2 осуществляется пересчет из стабилизированных сферических координат в нестабилизированную сферическую систему координат (НССК) исполнительного устройства.

xн = cosεccos(βc-α)cosψ+sinεcsinψ,

где εн, qн - углы наведения исполнительного устройства в НССК,
εcβc - углы наведения исполнительного устройства в СССК,
α, ψ, θ - углы курса, тангажа и крена носителя соответственно.
Сигнал с ПК2 поступает на вход исполнительного устройства (ИУ) 7, которое разворачивает оптико-электронный блок 1 в направлении сопровождаемого объекта. Сигнал, соответствующий ошибке ИУ, поступает на вход третьего преобразователя координат (ПК3) 8. В нем осуществляется пересчет координат из НССК исполнительного устройства 7 в измерительную систему координат, связанную с ОЭБ.
δΦиу = δεН,
δqиу = δqНcosεН, (3)
где δΦиу, δqиу - ошибки исполнительного устройства в измерительной системе координат,
δεН, δqн - ошибки исполнительного устройства в НССК.
С выхода ПК3 сигнал поступает на второй вход блока определения координат 2, где используется для дополнительного сдвига строба на текущую величину ошибки исполнительного устройства с учетом несовпадения систем координат, в которых работают ИУ и БОК соответственно.
Из описанного видно, что в предлагаемой системе за счет введения КУ, первого и второго преобразователя координат создается замкнутый контур наведения и стабилизации линии визирования оптико-электронного блока, что позволяет существенно уменьшить динамическую ошибку электромеханического контура от возмущений, обусловленных перемещением подвижного основания. В результате существенно уменьшается скорость перемещения изображения объекта относительно растра. Следовательно, уменьшаются потери контраста и искажения образа объекта из-за "смазывания" изображения. Это приводит к повышению надежности сопровождения объекта с качающегося основания, повышению дальности его сопровождения и повышению точности определения его координат при прочих равных условиях.
Дальнейшее необходимое повышение точности сопровождения возможно только при уменьшении ошибок электромеханического контура и, соответственно, скорости перемещения линии визирования относительно оптической оси ОЭБ, обусловленных слежением за высокоскоростными объектами.
Повышение динамической точности электромеханического контура достигается в предлагаемой системе за счет введения в ОЭС связи через третий преобразователь координат между ошибкой исполнительного устройства и контуром следящего строба. Использование управления стробом по сигналам ошибки исполнительного устройства позволяет существенно уменьшить влияние его инерционности и, соответственно, увеличить коэффициент усиления в электромеханическом контуре. Увеличение коэффициента усиления в электромеханическом контуре приводит к уменьшению его динамических ошибок и, следовательно, дополнительному уменьшению скорости перемещения оптико-электронного блока относительно сопровождаемого объекта. А следовательно, и дополнительному увеличению положительных эффектов, описанных выше.
Кроме того, поскольку ошибка определения координат объекта блоком определения координат 2 тем больше, чем больше время решения задачи, а оно тем меньше, чем меньше размер строба, и в то же время требуемый минимальный размер строба тем меньше, чем меньше ожидаемое перемещение изображения объекта относительно строба от цикла к циклу, а введение сигнала по ошибке ИУ на БОК делает перемещение строба относительно изображения объекта практически безинерционным, имеет место дополнительное повышение точности определения координат за счет минимизации размеров следящего строба.
Таким образом, в предлагаемой системе повышение точности сопровождения при одновременном повышении дальности сопровождения и устойчивости сопровождения при воздействии качек обеспечивается за счет обеспечения стабилизации линии визирования и существенного снижения влияния инерционности исполнительного устройства за счет подачи его сигналов ошибок в контур следящего строба с учетом совокупности блоков и связей, приведенных на фиг. 1.
Источники информации
1. Сборник: "Теория и проектирование высокоточных систем управления", Ленинград, "Наука", 1973 г. Статья: "Структурный анализ двухконтурной оптической следящей системы", Буров А.Ф. и др.
2. Максимов М. В., Горгонов Г.И. "Радиоэлектронные системы самонаведения", М., "Радио и связь", 1982.
3. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. "Телевизионные системы летательных аппаратов", М., "Советское радио", 1979 г.
4. Гершберг А.Е. "Передающие телевизионные трубки, использующие внутренний фотоэффект", М.-Л. "Энергия", 1964 г.
5. Тетельбаум И.И., Шнейдер Ю.Р. "400 схем для АВМ", М., "Энергия", 1978 г.
6. Ривкин С.С. "Стабилизация измерительных устройств на качающемся основании", М., "Наука", 1978 г.
7. Бесекерский В.А., Попов Е.П. "Теория систем автоматического регулирования", М., "Наука", 1973 г.
8. Чиликин М.Г., Сандлер А.С. "Общий курс электропривода", М., "Энергоиздат", 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2001 |
|
RU2192034C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
Изобретение относится к оптико-электронным системам управления. Технический результат заключается в обеспечении устойчивости сопровождения следящей системы при работе с качающегося основания при одновременном увеличении дальности действия, а также в повышении точности определения координат. Оптико-электронная следящая система содержит исполнительное устройство, оптико-электронный блок, блок определения координат, преобразователи координат, коммутатор, корректирующее устройство. 2 ил.
Оптико-электронная следящая система, содержащая последовательно соединенные исполнительное устройство, оптико-электронный блок и блок определения координат, отличающаяся тем, что в нее введены последовательно соединенные преобразователь координат из измерительной системы координат оптико-электронного блока в стабилизированную сферическую систему координат, коммутатор, корректирующее устройство и преобразователь координат из стабилизированной сферической в нестабилизированную сферическую систему координат, а также преобразователь координат из нестабилизированной сферической в измерительную систему координат оптико-электронного блока, при этом второй выход исполнительного устройства соединен со входом преобразователя координат из нестабилизированной сферической в измерительную систему координат, выход которого соединен со вторым входом блока определения координат, выход преобразователя координат из стабилизированной сферической в нестабилизированную сферическую систему координат соединен со входом исполнительного устройства, выход блока определения координат соединен со входом преобразователя координат из измерительной системы координат оптико-электронного блока в стабилизированную сферическую систему координат, при этом коммутатор имеет второй вход для управления от внешних систем.
| БАРСУКОВ Ф.И | |||
| и др | |||
| Телевизионные системы летательных аппаратов.-М.: Сов.радио, 1979, с.232, рис | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОСОПРОВОЖДЕНИЯ | 1993 |
|
RU2081383C1 |
| US 3567163 A, 02.03.1971 | |||
| МАКСИМОВ М.В., ГОРГОНОВ Г.И | |||
| Радиоэлектронные системы самонаведения.-М.: Радио и связь, 1982, с.228-229, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Там же, с | |||
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| БУРОВ А.Ф | |||
| и др | |||
| Структурный анализ двухконтурной оптической следящей системы | |||
| В cб.: Теория и проектирование высокоточных систем управления.-Л.: Наука, 1973. | |||

