Изобретение относится к области систем наблюдения и сопровождения за объектами в пространстве преимущественно с подвижного основания.
Известна телевизионно-оптическая система сопровождения со следящим стробом, содержащая телевизионную камеру, устройство обработки видеосигнала, решающее устройство, привод наведения [1].
Недостатком данной телевизионной системы является недостаточная точность сопровождения целей с подвижного основания из-за отсутствия системы стабилизации оптической линии визирования и, значит, динамической инерционности исполнительного привода и контура электронного слежения.
Известно также оптико-электронное устройство [2] (стр.110-112, рис. 3.23), состоящее из связанных между собой оптико-электронного пеленгатора и привода с усилителем мощности. Эта система имеет входы приема оптического сигнала, внешнего целеуказания и коррекции. В процессе сопровождения разворот пеленгатора на объект осуществляется приводом по сигналам от пеленгатора. Недостатком этой системы является отсутствие измерителей качек, что затрудняет использование этой системы на носителях, подверженных воздействию качек. Кроме того, отсутствие функциональных блоков для выдачи точных координат объекта относительно оптической оси оптико-электронного пеленгатора не позволяет осуществлять автозахват объекта на сопровождение.
Известна следящая система [2] (стр. 228, 229, рис.6.7), состоящая из последовательно соединенных датчика поступательного движения, вычислителя, гиростабилизатора, пеленгатора и усилителя мощности, выход которого соединен со вторым входом гиростабилизатора. Данная система позволяет осуществлять работу с качающегося основания. Однако в связи с тем, что для стабилизации используется гиропривод, отсутствует практическая возможность стабилизации массивных оптических приборов, т.е. приборов с большими фокусными расстояниями и диаметрами входного зрачка. Это не позволяет обеспечить сопровождение объектов, находящихся на большой дальности либо имеющих малый контраст относительно фона. Эта система также неспособна к автоматическому захвату объекта на сопровождение.
В литературе описана также следящая система [2] (стр.229, 230, рис.6.8), состоящая из последовательно соединенных датчика угловой скорости, сумматора, усилителя мощности, двигателя и пеленгатора. Выход пеленгатора соединен со вторым входом сумматора. В этой системе датчик угловой скорости, сумматор, усилитель мощности и двигатель выполняют функции устройства наведения и стабилизации. В данной системе захват объекта на автосопровождение возможен лишь путем точного совмещения изображения объекта со стробом (окном анализа), что затруднительно при значительном рассогласовании положений объекта и строба в картинной плоскости пеленгатора. Кроме того, отсутствие устройств для динамической коррекции не позволяет в достаточной мере реализовать возможности исполнительного устройства.
Наиболее близкой к предлагаемому изобретению является телевизионно-оптическая система [3] (стр.8, 9, рис.4), содержащая последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство (в совокупности образующие пеленгатор) и исполнительный орган. Исполнительный орган, выполняющий функции блока наведения и стабилизации, кинематически связан с оптико-электронным (телевизионным) датчиком пеленгатора.
В известной системе переход в автоматический режим осуществляется посредством предварительного разворота пеленгатора на предназначенный для сопровождения объект таким образом, чтобы он оказался в пределах окна захвата внутри поля зрения. Однако при увеличении угловых скоростей и ускорений визирования объекта вероятность перехода в автоматический режим сопровождения падает. Это объясняется, с одной стороны, падением контраста изображения объекта, перемещающегося относительно растра (см. [3], стр.209-212). С другой стороны, если предварительный разворот пеленгатора осуществляется в полуавтоматическом режиме с участием человека-оператора, увеличиваются ошибки сопровождения высокоскоростного объекта оператором в силу ограниченности его динамических характеристик, приводящих к недопустимым переходным процессам в оптико-электронной системе, вызывающим срыв автосопровождения [4].
Задачей предлагаемого изобретения является обеспечение автоматизации захвата объекта на сопровождение в оптическом режиме, а также повышение устойчивости сопровождения объекта и возможность автоматического восстановления сопровождения в оптическом режиме в случае перерыва оптической связи.
Для решения указанной задачи в систему сопровождения, содержащую оптико-электронный пеленгатор и устройство наведения и стабилизации, введены последовательно соединенные блок сравнения, первый коммутатор и блок фильтрации, последовательно соединенные блок памяти, второй коммутатор и сумматор, последовательно соединенные локационный пеленгатор и формирователь логики режимов, при этом локационный и оптико-электронный пеленгаторы механически соединены друг с другом и кинематически связаны с первым выходом устройства наведения и стабилизации, второй выход оптико-электронного пеленгатора соединен со вторым входом формирователя логики режимов, первый выход которого соединен со входом управления первого коммутатора, а второй выход - со входом управления второго коммутатора, второй выход локационного пеленгатора соединен со вторым входом второго коммутатора, третий вход которого соединен с первым выходом оптико-электронного пеленгатора, а второй выход - со входом устройства наведения и стабилизации, вторым выходом связанного со вторым входом сумматора, выход которого соединен со входом оптико-электронного пеленгатора, выход блока фильтрации подключен ко второму входу первого коммутатора, второй выход которого связан со входом блока памяти, первый и второй входы блока сравнения соединены соответственно с первым выходом оптико-электронного пеленгатора и вторым выходом локационного пеленгатора.
На чертеже приведена функциональная схема для одного канала предлагаемой системы сопровождения.
Система сопровождения состоит из последовательно соединенных оптико-электронного пеленгатора 1 (ОЭПл), блока сравнения 2 (БС), первого коммутатора 3 и блока фильтрации 4 (БФ), последовательно соединенных блока памяти 5 (БП), второго коммутатора 6 и сумматора 7, последовательно соединенных локационного пеленгатора 8 (ЛПл) и формирователя логики режимов 9 (ФЛР), а также устройства наведения и стабилизации 10 (УНС). Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации. Второй выход ЛПл 8 подключен ко второму входу второго коммутатора 6, третий вход которого соединен с первым выходом ОЭПл 1. Второй выход второго коммутатора 6 связан со входом УНС 10, чей второй выход подключен ко второму входу сумматора 7, выходом соединенного со входом ОЭПл 1. Выход БФ 4 соединен со вторым входом первого коммутатора 3, второй выход которого подключен ко входу блока памяти 5. Второй выход ОЭПл 1 соединен со вторым входом ФЛР 9, чьи первый и второй выходы подключены соответственно к управляющим входам первого и второго коммутаторов, второй вход блока сравнения соединен со вторым выходом локационного пеленгатора.
Все используемые составные части системы сопровождения являются известными либо могут быть получены из известных устройств путем их объединения известными методами.
Оптико-электронный пеленгатор может быть выполнен как это описано в прототипе или [1]. Локационный пеленгатор может быть взят аналогичным [2] (стр. 219, рис. 6.1), можно использовать и лазерную локационную установку. Коммутаторы могут быть реализованы на герконах, реле, электронных ключах и т.п. Блок памяти может быть как аналоговым (устройства выборки-хранения), так и реализованным на цифровой элементной базе (см., например, [5]). Блоки сравнения, фильтрации, а также сумматор могут быть реализованы на операционных усилителях [6] или цифровых микросхемах. Формирователь логики режимов может быть изготовлен на базе логических микросхем [7]. Устройство наведения и стабилизации может быть реализовано как в прототипе, на базе пневматических, гидравлических, электрических [8], в т.ч. на базе двух- и трехкоординатных моментных, двигателей и т. п. сервоприводов. При необходимости работы при больших углах возвышения или существенных значениях амплитуды качек, когда система сопровождения может потерять устойчивость в результате возникновения положительных перекрестных связей из-за несовпадения измерительной и исполнительной систем координат, УНС может быть дополнено преобразователями координат. Например, УНС может представлять собой последовательно соединенные преобразователь координат из измерительной системы координат (СК) пеленгатора в стабилизированную сферическую СК, блок динамической коррекции, преобразователь координат из стабилизированной сферической СК в исполнительную СК сервопривода, сам сервопривод и преобразователь координат ошибки сервопривода из исполнительной СК в измерительную. Выходной вал привода наведения при этом является выходным валом устройства наведения и стабилизации. Если же преобразователь координат из измерительной системы координат (СК) пеленгатора в стабилизированную сферическую СК и блок динамической коррекции входят в состав пеленгаторов, то из состава УНС они должны быть исключены. Вопросы применения и построения преобразователей координат подробно описаны в [9]. Блок динамической коррекции при известных требованиях к системе сопровождения может быть сформирован по правилам, изложенным в [10], с реализацией аппаратной части на основе методов, приведенных в [6].
Работа системы сопровождения происходит следующим образом.
Поскольку диаграмма направленности луча (1-2o) локационного пеленгатора 8 существенно больше величины следящего строба (1-5 мрад) оптико-электронного пеленгатора 1 и, как правило, превышает по ширине погрешность задания целеуказания, первоначально цель берется на сопровождение локационным пеленгатором. Он выдает признак автосопровождения объекта в формирователь логики режимов 9, который обеспечивает подключение через второй коммутатор 6 второго выхода ЛПл ко входу УНС 10 и блока памяти 5 - к сумматору 7. Выходной вал УНС разворачивает пеленгаторы (или их приемопередающие устройства) в сторону объекта таким образом, чтобы объект оказался на оси диаграммы направленности локационного пеленгатора 8.
Однако погрешности определения координат объекта с помощью ЛПл существенно выше, чем с помощью ОЭПл. Поэтому целесообразно перевести управление устройством наведения и стабилизации 10 на сигнал от ОЭПл 1. Для этого необходимо обеспечить попадание изображения от объекта в часть поля зрения ОЭПл, соответствующую стробу. Поскольку процессу сопровождения, особенно за высокоскоростными объектами либо с быстродвижущегося носителя, присущи динамические ошибки, необходимо обеспечить перемещение следящего строба по полю зрения в соответствии с текущей величиной ошибки. Для этого сигнал, соответствующий ошибке УНС по необходимому направлению, подается через сумматор на вход оптико-электронного пеленгатора. Кроме того, необходимо учесть величину разъюстировки пеленгаторов. Дело в том, что погрешности установки таких достаточно крупных приборов могут достигать 1-2 мрад. То есть неучет этой погрешности может привести к тому, что изображение объекта окажется вне строба даже при идеальном учете динамической ошибки. Для компенсации разъюста соответствующая поправка из блока памяти 5 добавляется в сумматоре 7 к сигналу из УНС 10.
Когда изображение объекта оказывается в стробе и сигнал от него становится отличим от фона, оптико-электронный пеленгатор выдает в ФЛР 9 информацию об этом со своего второго выхода. Формирователь логики режимов переключает с помощью второго коммутатора 6 вход УНС 10 к первому выходу ОЭПл и отключает БП 5 от сумматора 7. В этом режиме выходной вал устройства наведения и стабилизации 10 стремится развернуть пеленгаторы так, чтобы изображение объекта оказалось в центре растра, соответствующем положению оптической оси ОЭПл 1. Точность слежения за объектом возрастает. Дополнительный эффект повышения точности определения координат достигается за счет того, что смещение строба по сигналу от УНС выполняет роль компенсирующей связи, разгружающей контур следящего строба.
Как было сказано выше, для внесения поправки на разъюст она должна быть сформирована. В простейшем случае это могут быть сигналы, например, с потенциометров, выставляемые в процессе котировочных работ, либо устройств выборки-хранения, переводимых по окончании юстировки в режим хранения. В предлагаемой системе процедуру юстировки предлагается автоматизировать. Это достигается за счет того, что координаты, вырабатываемые локационным и оптико-электронным пеленгаторами, сравниваются между собой в БС 2, при необходимости с учетом параллакса. Поскольку разность сигналов имеет малую величину, а сигналы, особенно с локационного пеленгатора, зашумлены, полученную величину подвергают фильтрации в БФ 4. Вид фильтра определяется спектральным составом полезного сигнала и шума. Для медленно меняющихся полезных сигналов могут использоваться, например, фильтры низких частот либо устройства, вычисляющие среднее значение функции на определенном временном интервале. Результаты заносятся в БП 5. Так как эти операции целесообразно проводить только когда автосопровождение осуществляется обоими пеленгаторами, формирователь логики режимов 9 анализирует наличие признаков автосопровождения в обоих каналах и выдает в этом случае сигнал управления на первый коммутатор 3, который подключает блок сравнения 2 к блоку фильтрации 4, а последний - к блоку памяти 5.
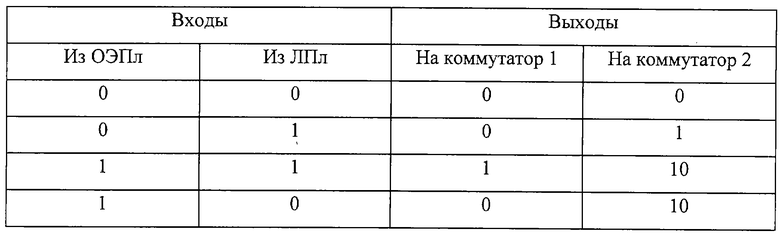
Из сказанного выше видно, что первый коммутатор 3 может находиться в двух состояниях (включен и выключен), а второй коммутатор 6 - в трех (отключен, режим управления УНС от ЛПл, режим управления УНС от ОЭПл). Зависимости соответствующих двоичных кодов на выходе ФЛР от сигналов на входах приведены в таблице.
При необходимости, для уменьшения числа переключений из режима в режим системы сопровождения в работе ФЛР могут использоваться временные задержки, например задержка на подключение входа УНС к выходу ЛПл на некоторый период, в течение которого сигнал о сопровождении объекта ЛПл поступает непрерывно. Аналогичная задержка может быть введена и при переходе на управление от ОЭПл, а также при кратковременных перерывах сопровождения объекта ОЭПл.
Таким образом, из изложенного видно, что в предлагаемой системе сопровождения обеспечивается автоматический захват на сопровождение объекта оптико-электронным пеленгатором за счет введения величин разъюстировки и текущих динамических ошибок на следящий строб. Повышается устойчивость сопровождения объекта за счет обеспечения возможности перехода сопровождения с локационного режима в оптический и обратно. Кроме того, обеспечивается автоматизация определения величины разъюстировки между локационным и оптическим каналами.
Источники информации
1. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. "Телевизионные системы летательных аппаратов", М., "Советское радио", 1979, стр.232, рис.7.17, аналог.
2. Максимов М. В., Горгонов Г.И. "Радиоэлектронные системы самонаведения", М., "Радио и связь", 1982, аналог.
3. Грязин Г.Н. "Оптико/электронные системы для обзора пространства: Системы телевидения", Л., "Машиностроение", Ленинградское отд-е, 1988, прототип.
4. Цибулевский И.Е. "Человек как звено следящей системы", М., "Наука", 1981, стр.93-108.
5. Справочник по интегральным микросхемам, М., "Энергия", 1981.
6. Тетельбаум И. И. , Шнейдер Ю.Р. "400 схем для АВМ", М., "Энергия", 1978.
7. Павлов В.В. "Управляющие устройства логического типа", М., "Энергия", 1968.
8. Чиликин М.Г., Сандлер А.С. Общий курс электропривода, М., "Энергоиздат", 1981.
9. Ривкин С.С. "Стабилизация измерительных устройств на качающемся основании", М., "Наука", 1978.
10. Бесекерский В.А., Попов Е.П. "Теория систем автоматического регулирования", М., "Наука", 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
Изобретение относится к области систем наблюдения и сопровождения за объектами в пространстве преимущественно с подвижного основания. Техническим результатом изобретения является обеспечение автоматизации захвата объекта на сопровождение в оптическом режиме, а также повышение устойчивости сопровождения объекта и возможность автоматического восстановления сопровождения в оптическом режиме в случае перерыва оптической связи. Система сопровождения состоит из последовательно соединенных оптико-электронного пеленгатора, блока сравнения, первого коммутатора и блока фильтрации, последовательно соединенных блока памяти, второго коммутатора и сумматора, последовательно соединенных локационного пеленгатора и формирователя логики режимов, а также устройства наведения и стабилизации. Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации. Второй выход локационного пеленгатора подключен ко второму входу второго коммутатора, третий вход которого соединен с первым выходом оптико-электронного пеленгатора. Второй выход второго коммутатора связан со входом устройства наведения и стабилизации, чей второй выход подключен ко второму входу сумматора, выходом соединенного со входом оптико-электронного пеленгатора. Выход блока фильтрации соединен со вторым входом первого коммутатора, второй выход которого подключен ко входу блока памяти. Второй выход оптико-электронного пеленгатора соединен со вторым входом формирователя логики режимов, чьи первый и второй выходы подключены соответственно к управляющим входам первого и второго коммутаторов, второй вход блока сравнения соединен со вторым выходом локационного пеленгатора. 1 ил., 1 табл.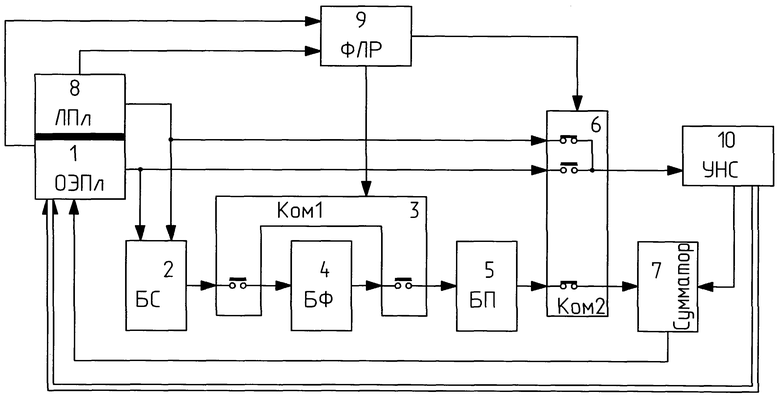
Система сопровождения, состоящая из устройства наведения и стабилизации и оптико-электронного пеленгатора, отличающаяся тем, что в ее состав введены последовательно соединенные блок сравнения, первый коммутатор и блок фильтрации, последовательно соединенные блок памяти, второй коммутатор и сумматор, последовательно соединенные локационный пеленгатор и формирователь логики режимов, при этом локационный и оптико-электронный пеленгаторы механически соединены друг с другом и кинематически связаны с первым выходом устройства наведения и стабилизации, второй выход оптико-электронного пеленгатора соединен со вторым входом формирователя логики режимов, первый выход которого соединен со входом управления первого коммутатора, а второй выход - со входом управления второго коммутатора, второй выход локационного пеленгатора соединен со вторым входом второго коммутатора, третий вход которого соединен с первым выходом оптико-электронного пеленгатора, а второй выход - со входом устройства наведения и стабилизации, вторым выходом связанным со вторым входом сумматора, выход которого соединен со входом оптико-электронного пеленгатора, выход блока фильтрации подключен ко второму входу первого коммутатора, второй выход которого связан со входом блока памяти, первый и второй входы блока сравнения соединены соответственно с первым выходом оптико-электронного пеленгатора и вторым выходом локационного пеленгатора.
| ГРЯЗИН Г.Н | |||
| Оптико-электронные системы для обзора пространства: Системы телевидения | |||
| - Л.: Машиностроение, Ленинградское отделение, 1988, с.8, 9, рис.4 | |||
| RU 94009100 А1, 20.11.1995 | |||
| US 5317319 А, 31.05.1994 | |||
| РЕГУЛЯТОР ОТНОШЕНИЯ ДАВЛЕНИЙBCf^cofosHAa ?|МГ1г1Пш-;(АШ';Е-нд||. | 0 |
|
SU310235A1 |
| 0 |
|
SU155494A1 | |
