113
Изобретение относится к способам децентрализованного управления движением на перекрестке и может быть использовано для адаптивного выбора программ регулирования движения.
Цель изобретения - упрощение способа путем выбора для регулирования движения на перекрестке программы с наиболее близкими интенсивностями транспортных Потоков на направлениях входящих в каждую фазу регулирования
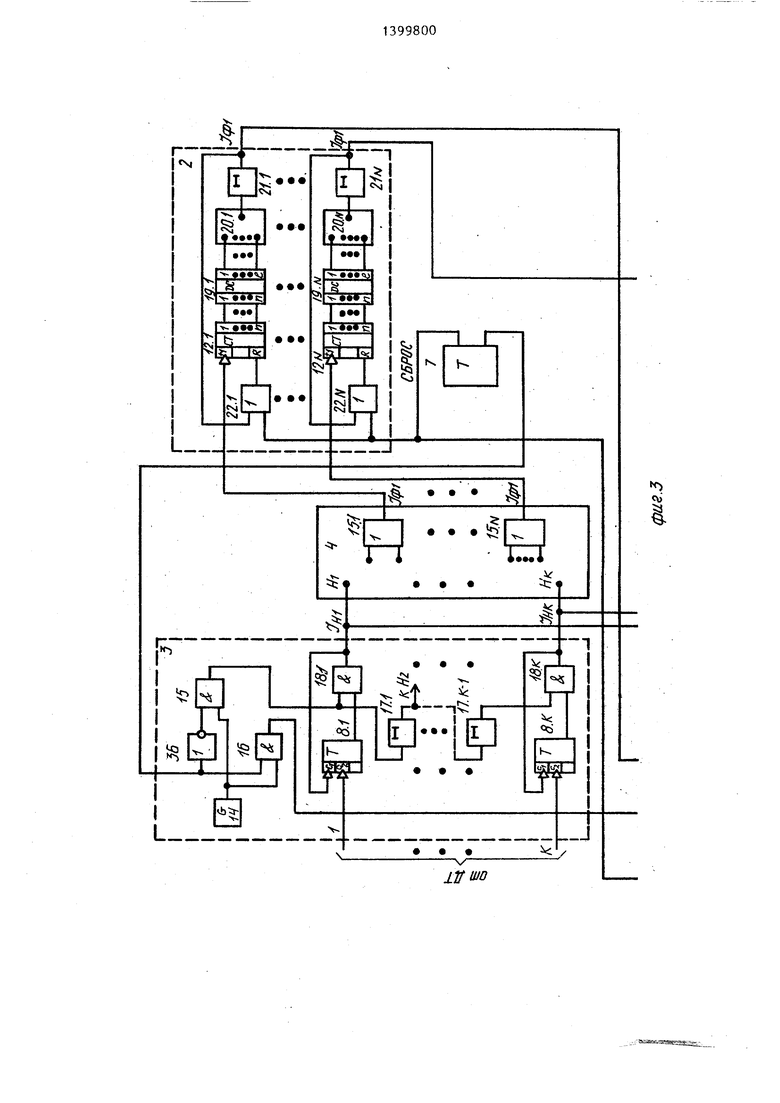
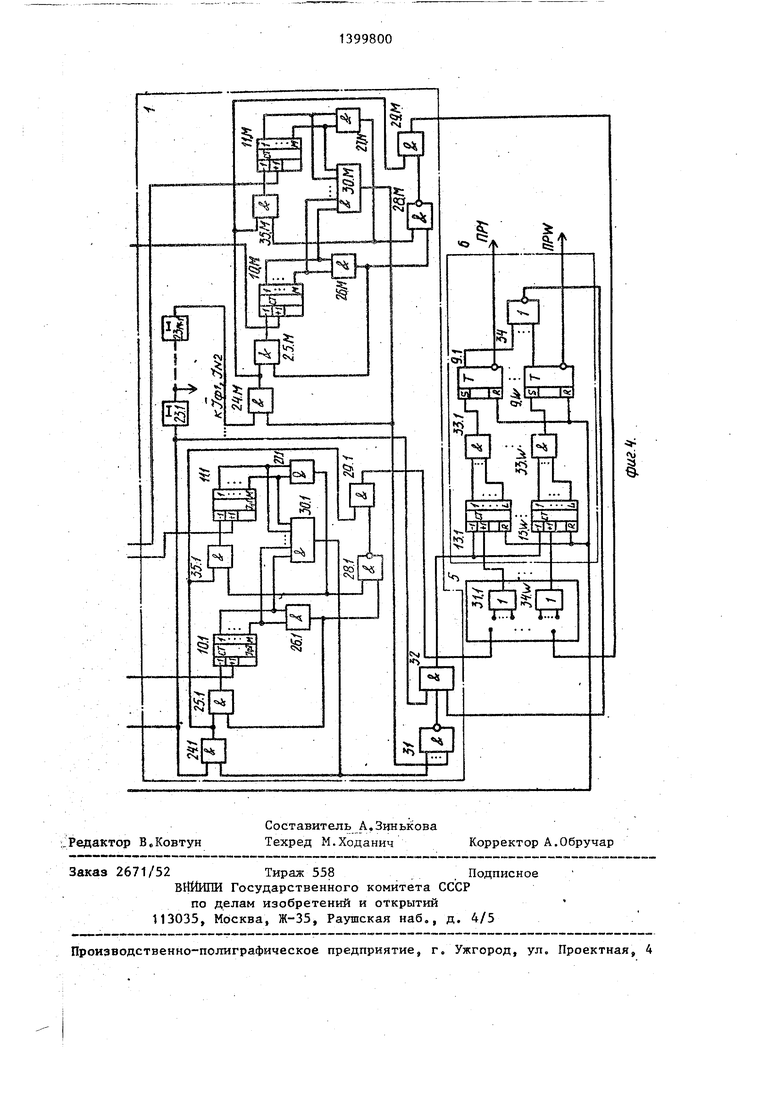
На фиг.1 условно показана реализация способа при изменении интенсив ностей транспортных потоков на пере- крестке} на фиг,2 - функциональная схема устройства, реализующего способ- на фиг.3,4 - структуры блоков устройства, а также связи между ними
Устройство, реализукмцее способ, содержит первый 1 и второй 2 вычислительные блоки, формирователь 3 импульсов, первый 4 и второй 5 дешифраторы, блок 6 сравнения, таймер 7, триггера 8,1-8,К и 9,1-9.W, счетчики 10;1-10.М„ 11,1-11,М, 12.1-12,N и 13.1-13,Wi, генератор 14, элементы 15 и 16 И,-элементы 17,1-17,К-1 задержки, элементы 18,1-18,КИ, дешифраторы 19.1-19,N, коммутаторы 20.1-20,N, элементы 21.1-21,N задержки, элемент 22.1-22,N ИЛИ, элементы 23.1-23.М-1 задержки, элементы 24,1-24.М, 25.1- 25,М, 26.1-26.Ми 27,1-27.М И, элементы 28,1-28.М И-НЕ, элементы 29,1- 29,М и 30.1-30,М И, элемент 31 И-НЕ, элементы 32 и 33,1-33.W И, элемент 34 ИЛИ-НЕ, элемент 35.1-35.МИ, инвертор 36,
Способ заключается в следующем,
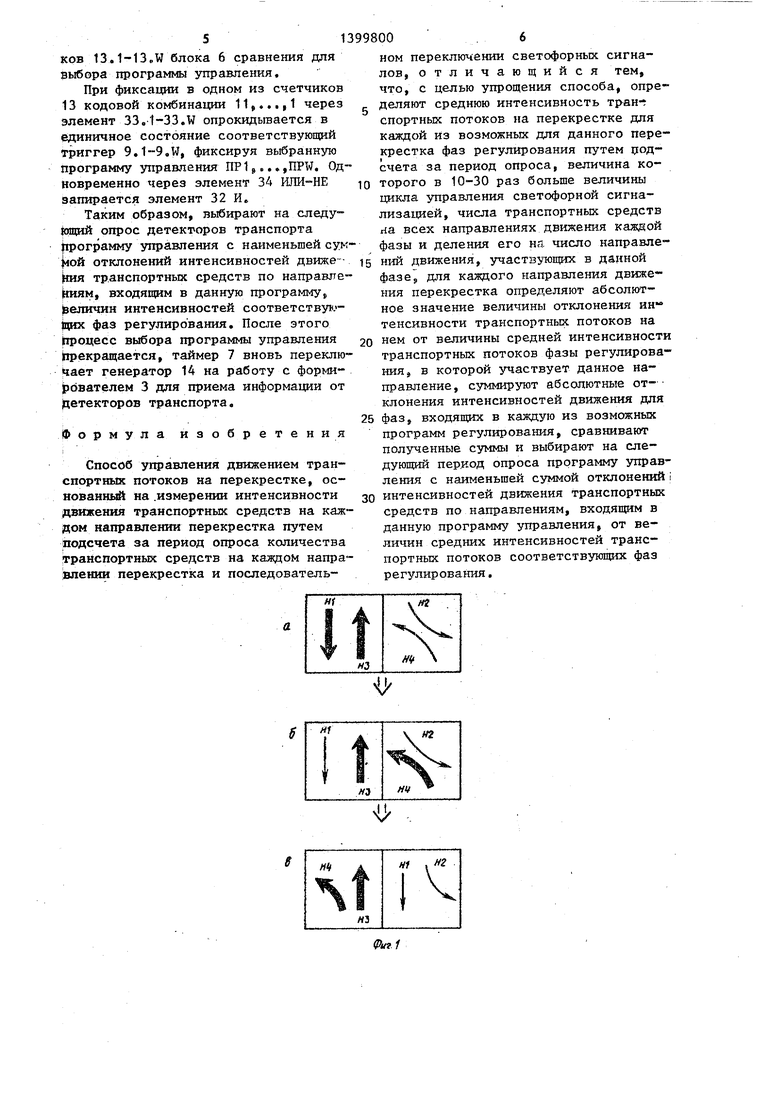
Предположим, перекресток управляется по схеме, показанной на фиг,1а, потоки по направлениям H1jH3 имеют высокую интенсивность, а потоки по направлениям Н2,Н4 имеют малую интен сивность.
Пусть произошло существелное и долговременное изменение интенсивности потоков по направлениям следукицим образом: интенсивность потока по направлению HI упала, а интенсивность потока по направлению Н4 возросла (фиг о 16),
При Bbt6ope программы управления движением транспортных потоков по предлагаемому способу при указанном изменении интенсивностей потока чере несколько циклов управления для перекрестка будет выбрана новая схема
0
5
5
5
организации движения, показанная на фиг„1в, по признаку близости значений интенсивностей потоков по направле- ниям внутри каждой из фаз.
Следует отметить, что предлагаемый способ ориентирован на управление удаленными некоординируемыми перекрестками, поступление транспорта на 0 которые не имеет выраженных периодических максимумов.
В состав устройства, реализующего предлагаемый способ, входят два вычислительных блока. Первьй вычисли- . тельный блок .1 слуткит для определения отклонения интенсивности транспортного потока IMJ по каждому из направлений Н1-НК от средней интенсивности транспортных потоков „,. фа-, зы регулирования, в которую входит каждое из направлений движения.
Второй вычислительньш блок предназначен для определения средних интенсивностей транспортных потоков 1ф,-1(р во всех возможных для данного перекрестка фазах регулирования.
Способ реализуется следующим образом.
При включении устройства происхо- 0 дит по цепям питания (не показаны) сброс в нулевое состояние триггеров 8,1-8.К и 9,1-9.W и счетчиков 10.1- 10.М, 11.1-11.М, 12.1-12.N, 13,1- 13.W, где К - количество направлений движения на перекрестке, на котором осуществляется способу N - количество возможных фаз регулирования на перекрестке; W - количество возможных nporpiaMM регулирования движения на
N
.,, где
г
еколи
чество направлений движения, участвующих в 1-й фазе Ф регулирования
на перекрестке, I
При включении устройства производится сброс по цепям питания в исходное состояние триггеров ячеек 8.1- 8К, 9.1-9.W и счет 30,, ... ,30,35, ,,.., 35;,.37, ,..,,37, а ячейка 31,1
07 7
устанавливается в рабочее состояние. Сигналы от детекторов транспорта на всех регулируемых направлениях в виде импульсов постоянного тока подаются на входы 1,,.,,К формирователя 3, на управляющий вход которого поступают сигналы разрешения с таймера 7 (фиг.2). Сигналом с таймера 7 (фиг.З) разрешается прохождение
импульсов с генератора 14 через элемент 15Й и запрещается через элемент 16 И. Сигналы, поступающие с детекторов транспорта, записьшаются с помощью триггеров 8.1-8,К по входу С2. Считьгеание записанной информации из формирователя 3 производится со сдвигом во времени за счет элементов задержки 17.1-17.К-1 через элементы 18.1-18,К И, при этом задним фронтом импульсов с выхода элементов 18,1- 18,К И обнуляются по входу С1 триггеры 8,1-8К, Частота следования импульсов с генератора 14 выбирается на несколько порядков выше частоты следования транспортных средств.
Сигналы, соответствующие интенсив ностям потоков по всем регулируемым направлениям движения (1,...,1ик) с выхода формирователя 3 поступают на входы первого дешифратора 4 направлений в фазы, С помощью счетчиков 12,.1-12.N второго вычислительного блока 2 суммируют по каждой фазе Ф,..,Ф сигналы, соответствующие интенсивности потоков на каждом направлении Hj, входящем в данную фазу регулирования. Затем определяют среднюю интенсивность потоков направлениям, участвующим в данной фазе движения „,; , для чего производят деление количества импульсов, соответствующих суммарной интенсивности потоков по каждой фазе, на число направлений движения, участвующих в данной фазе. При этом с помощью де- .шифраторов 19,1-19,N, коммутаторов 20,1-20.N, элементов задержки 21.1- 21,N и элементов 22.1-22,N ИЖ второго вычислительного блока 2 осуществляют обратную связь для .сброса в исходное состояние счетчиков 12,1- 12,N, производят деление суммарной интенсивности потоков по каждой фазе на число направлений этой фазы. Число направлений движения (делитель) устанавливается например с помощью перемычек на коммутаторах 20.1-20,N. Сигналы, соответствующие значениям средних интенсивностей фаз (1
lej) с информащюнных выходов второго вычислительного блока 2 подаются на суммирующие входы счетчиков 10,1- 10,М первого вычислительного блока 1. Одновременно сигналы, соответствующие интенсивности движения на регули руемых направлениях движения (1 .«. 1.НЧ.) информационных выходов
0
5
5
0
формирователя поступают на суммирующие входы счетчиков 11.1-11,М первого вычислительного блока 1.
По окончании очередного периода опроса детекторов транспорта, величина которого в tO-30 раз больше величины цикла управления светофорной сигнализацией, таймер 7 вьщает импульс Сброс, поступаюпщй на элементы 12.1-12,N, 13.1-13.W и 9.1-9,W. С другого выхода таймера 7 выдается сигнал на управляющий вход формирователя 3, запрещакяций прохождение импульсов с генератора 14 через элемент 15 И и разрешающий через элемент 16И, Элементы задержки 23,1-23.М-1 осуще ствляют разделение по времени сигналов генератора 14, поступающих на вычитающие входы счетчиков 10.1-10,М. Этими сигналами через элементы 24,1- 24.М И, 25.1-25,М И осуществляют одп новременное вычитание импульсов в счетчиках 10.1-10,Ми 11,1-11.М. Фиксация нулевого состояния любого из счетчиков производится с помощью элементов 26,1-26.М и 27., Импульсы с генератора 14 формирователя 3 через элемент 28.1-28.М И-НЕ, 29.1- 29.М И поступают на соответствующие входы второго дешифратора 5 до тех - пор, пока не зафиксируется нулевое состояние счетчиков ТО,1-10.М и 11.1-11.М, При этом запираются соот- ветствукщие элементы 24.1-24.М И че- рез элементы 30.1-30,М И.
Количество импульсов, прошедших на входы второго дешифратора 5, соответствуют величине |1ср;-1ц j дпй всех и . Таким образом определяют величину отклонений интенсивностей потоков по направлениям участвукяцим в данной фазе, от средней интенсивности потоков по направ,- 5 ления этой фазы 1(р; -Хц .
С помощью второго дешифратора 5 производят сборку сигналов |1,-1н)| соответствукяцих отклонениям средней интенсивности потоков фаз движения, Q от каждого направления каждой фазы, участвующих в каждой программе управления, при этом количество программ управления равно W.
Как только все счетчики 10,1-10.М g и 11.1-11.М приведутся в нулевое состояние, срабатывает элемент 31 И-НЕ и через элемент 32 И импульсы генератора 14 формирователя 3 начинают поступать на вычитакяцие входы счетчи0
5
0
ков 13.1-13.W блока 6 сравнения для выбора программы управления,
При фиксации в одном из счетчиков 13 кодовой комбинации 11,..., 1 через элемент 33,1-33.W опрокидывается в единичное состояние соответствующий триггер 9,1-9,W, фиксируя выбранную Программу управления ПР1.,,,nPW. Одновременно через элемент 34 ИЖ-НЕ запирается элемент 32 И
Таким образом, выбирают на следу™ Йщий опрос детекторов транспорта
ном переключении светофорньгх сигналов, отличающийся тем, что, с целью упрощения способа, определяют среднюю интенсивность транспортных потоков на перекрестке для каждой из возможных для данного перекрестка фаз регулирования путем цод- счета за период опроса, величина ко- торого в 10-30 раз больше величины цикла управления светофорной сигнализацией, числа транспортных средств на всех направлениях движения каждой
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ координированного управления транспортными потоками | 1986 |
|
SU1324049A1 |
| СПОСОБ НЕЙРОСЕТЕВОГО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПОТОКАМИ В РАЙОНЕ РЕГУЛИРОВАНИЯ | 1997 |
|
RU2134453C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СВЕТОФОРАМИ НА РЕГУЛИРУЕМОМ ПЕРЕКРЕСТКЕ | 2014 |
|
RU2582756C1 |
| СПОСОБ КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОДВИЖНЫХ ЕДИНИЦ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2103746C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ ПОТОКОВ НА ПЕРЕКРЕСТКЕ | 2011 |
|
RU2486599C2 |
| Устройство для управления светофором | 1988 |
|
SU1597891A1 |
| Способ управления движением транспортных потоков на перекрестке | 1982 |
|
SU1068968A1 |
| Устройство для управления светофором | 1976 |
|
SU633060A1 |
| Устройство для централизованного контроля и управления движением транспортных средств | 1985 |
|
SU1317467A1 |
| Способ управления движением транспортных средств на перекрестке | 1987 |
|
SU1462395A1 |
Изобретение относится к способам децентрализованного управления движением транспортных потоков на перекрестке и может быть использовано для адаптивного выбора программ регулирования движения. Целью изоб9/ iemefffiopff mpofvnopma ретения является упрощение способа путем выбора для регулирования движения на перекрестке программы с наиболее близкими интенсивностями транспортных потоков на направлениях, входящих в каждую фазу регулирования. Информация от детекторов транспорта поступает на входы формирователя 3 импульсов, с выходов которого через первьй дешифратор 4 на входы блока i 2 поступают импульсы, соответствующие интенсивностям потоков в каждой из возможных фаз регулирования. В блоке 2 определяется средняя интенсивность потоков в каждой фазе. В блоке 1 на основе информации об. ин- тенсивностях потоков по всем направлениям и средних интенсивностях потоков в каждой фазе определяют отклонения интенсивностей каждого направ-- Ленин от интенсивностей соответствующих фаз и с помощью блока 6 сравнения выбирают программу управления с наименьшей суммой вычисленных откло- ; нений. 4 ил. Унж 00 ;О йО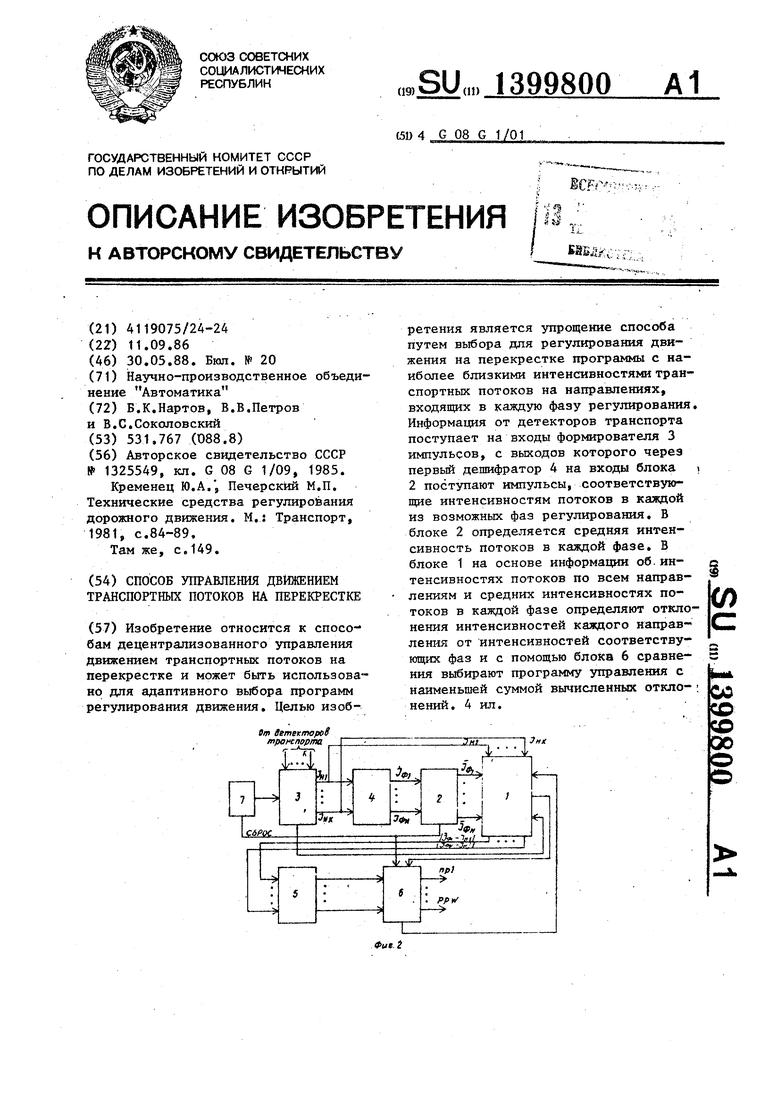
йрограмму управления с наименьшей сук фазы и деления его на, число направле- 1ой отклонений интенсивностей движе- 15 ний движения, участвующих в дайной
|ния транспортных средств по направле- Йиям, входящим в данную программу, величин интенсивностей соответству.-- вцсс фаз регулирования. После этого |процвсс выбора программы управления (фекращается, таймер 7 вновь переклю™ чает генератор 14 на работу с формирователем 3 для приема информации от Детекторов транспорта,
Формула изобретения
Способ управления движением транспортных потоков на перекрестке, основанный на .измерении интенсивности движения транспортных средств на каждом направлении перекрестка путем подсчета за период опроса количества транспортньк средств на каждом напра- |влении перекрестка и последовательфазе,, для каждого направления движения перекрестка определяют абсолютное значение величины отклонения ин тенсивности транспортных потоков на
20 нем от величины средней интенсивности транспортных потоков фазы регулирова ния, в которой участвует данное направление, суммируют абсолютные от- клонения интенсивностей движения для
25 фаз, входящих в каждую из возможных программ регулирования, сравнивают полученные суммы и выбирают на следующий период опроса программу управления с наименьшей суммой отклонений I
30 интенсивностей движения транспортных средств по направлениям, входящим в данную программу управления, от величин средних интенсивностей транспортных потоков соответствующих фаз регулирования.
tii
фазе,, для каждого направления движения перекрестка определяют абсолютное значение величины отклонения ин тенсивности транспортных потоков на
0 нем от величины средней интенсивности транспортных потоков фазы регулирова ния, в которой участвует данное направление, суммируют абсолютные от- клонения интенсивностей движения для
5 фаз, входящих в каждую из возможных программ регулирования, сравнивают полученные суммы и выбирают на следующий период опроса программу управления с наименьшей суммой отклонений I
0 интенсивностей движения транспортных средств по направлениям, входящим в данную программу управления, от величин средних интенсивностей транспортных потоков соответствующих фаз регулирования.
иг
-w
нг
нч
HI
нг
| Авторское свидетельство СССР № 1325549, юл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Кременец Ю.А., Печерскйй М.П | |||
| Технические средства регулирования дорожного движения | |||
| М.: Транспорт, 1981, с.84-89 | |||
| Там же, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
