Изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватным устройствам, конструктивно сопряженным с крановыми механизмами для подъема, опускания или перемещения груза.
Известно приспособление для навешивания захватного устройства на двурогий крюк крана, содержащее корпус и серьги, закрепленные посредством осей на захватном устройстве (авт.св. N 179870). Недостатком приспособления является применение ручного труда.
Наиболее близким по технической сущности к предлагаемому является приспособление для навешивания захватного устройства на двурогий крюк крана. В приспособлении серьги посредством подпружиненных тяг соединены с корпусом; на стойках подвижно установлены зубчатые рейки, взаимодействующие с шестернями; приспособление снабжено фиксатором рабочего положения, состоящим из рычажка и звездочки с выступом, контактирующими с упором, укрепленным на стойке. Недостатком такого приспособления является сложность и невысокая надежность, обусловленная наличием значительного количества подпружиненных элементов и неустойчивым положением звездочки фиксатора рабочего положения, необходимость специального стенда для навешивания на крюк и снятия с крюка.
Целью изобретения является упрощение конструкции, повышение надежности и обеспечение дистанционного навешивания (снятия) серег на крюк крана.
Сущность изобретения заключается в том, что серьги, закрепленные посредством осей в корпусе, и установленная подвижно относительно корпуса в вертикальной плоскости опорная плита, выполненная с горизонтальными пазами и двумя вертикальными направляющими, кинематически связаны между собой размещенными в горизонтальных пазах опорной плиты и закрепленными на боковых сторонах серег роликами; в вертикальных направляющих установлены пружины, охватывающие стержни, закрепленные в корпусе. Устройство снабжено сигнализатором положения крюка, включенным в электрическую цепь управления крюком.
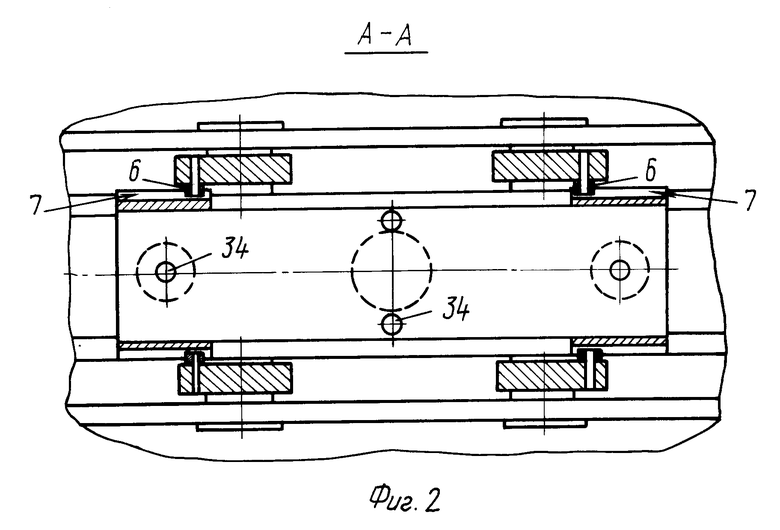
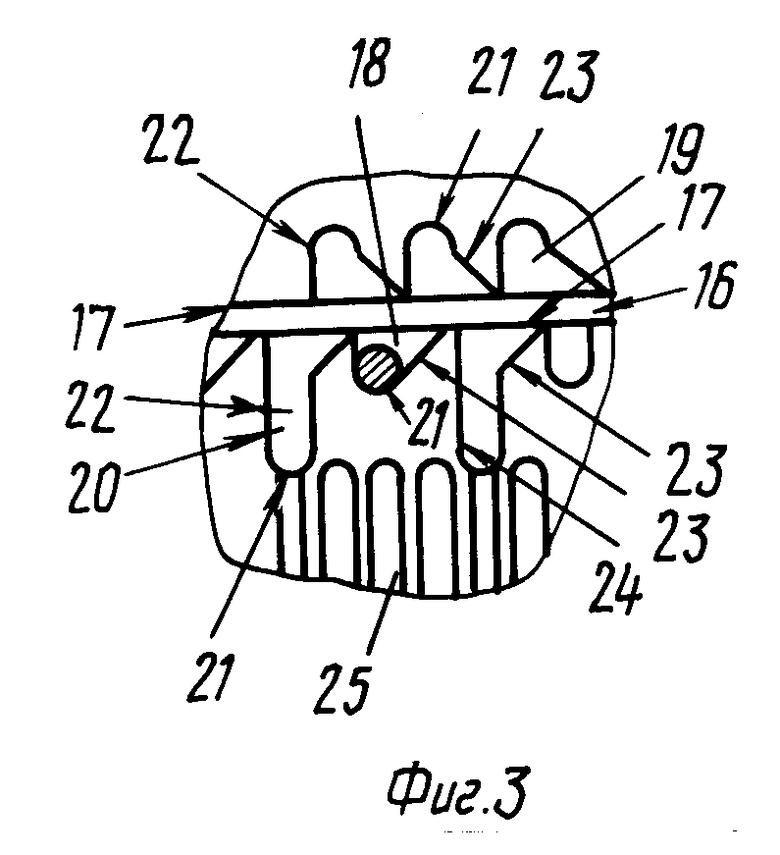
На фиг. 1 представлен общий вид устройства для дистанционного навешивания груза на двурогий кpюк крана; на фиг. 2 разрез по А-А на фиг. 1; на фиг. 3 развертка паза на фиг. 1.
Устройство для дистанционного навешивания груза на двурогий крюк крана содержит серьги 1 и 2, подвижно насаженные на оси 3 и 4, которые неподвижно закреплены в корпусе 5. В серьгах 1 и 2 установлены ролики 6 с некоторым смещением оси относительно оси симметрии серьги для создания опрокидывающего момента. Серьги 1 и 2 роликами 6 соединены посредством горизонтальных пазов 7, выполненных в торцах опорной плиты 8 с опорной плитой 8. К нижней поверхности опорной плиты 8 закреплены две полые направляющие 9, скользящие по двум направляющим стойкам 10, закрепленным на корпусе 5. В стойках 10 установлены пружины 11 (например тарельчатые) с направляющим стержнем 12, установленным и закрепленным неподвижно в стойках 10, для подъема серег 1 и 2 через опорную плиту 8 в вертикальное положение и гашения удара при опускании крюка 13 крана в крайнее нижнее положение.
По оси симметрии к опорной плите 8 закреплен палец 14 со свободно вращающейся втулкой 15, имеющей кольцевую канавку 16, в стенках 17 которой выполнены смещенные друг относительно друга равномерно глухие пазы 18, 19, 20 с торцом 21, одни стороны 22 которых расположены перпендикулярно, а другие стороны 23 под острым углом к стенкам канавки 16. Пазы 18, 19, 20 имеют одинаковые стороны 23 и одинаковую ширину, но различны по длине за счет дополнительных прямых участков 24. В нижней части втулки имеются продольные пазы 25 соосные пазам 18, 19, 20. Палец 14 со свободно вращающейся втулкой 15 и неподвижно установленным на нем кольцом с поверхностью 26 скользит поверхностью 26 в полой направляющей 27, закрепленной на корпусе 5. Полая направляющая 27 содержит упор 28, взаимодействующий с пазами 18, 19, 20; фиксатор 29, изображенный условно и представляющий собой подпружиненный шарик, взаимодействующий поочередно с продольными пазами 25 втулки 15, и конечный выключатель 30, дающий сигнал о положении крюка в крайнем нижнем положении. Над поверхностью опорной плиты 8 выступает подпружиненный стержень 31 с корпусом 32 и закрепленным на нем электрическим сигнализатором 33 для получения сигнала о касании крюком 13 поверхности опорной плиты 8. Конечный выключатель 30 изображен условно, закреплен на направляющей 27, но может быть закреплен и на другой подставке, установленной на корпусе 5. На верхней поверхности опорной плиты 8 установлены вертикальные стержни 34 (например четыре), ограничивающие местоположение крюка 13 на опорной плите 8. При однорогом крюке крана направляющая опорной плиты может быть совмещена с фиксатором рабочего положения, демпфером и конструкция может иметь одну серьгу.
Устройство для дистанционного навешивания груза на двурогий крюк крана работает следующим образом.
В исходном положении серьги 1 и 2 открыты, опорная плита 8 с полыми направляющими 9, пальцем 14 со втулкой 15 и подпружиненным стержнем 31 находится в крайнем верхнем положении, конечные выключатели 30 и 33, дающие сигнал о прилегании крюка 13 к верхней плоскости опорной плиты 8 и о положении крюка в крайнем нижнем положении, отключены. Пружины 11 находятся в предварительно поджатом состоянии. Предварительное поджатие пружин обеспечено сборкой на величину чуть больше массы всех падающих деталей (плиты 8 с направляющими 9) и предусмотрены резервы на сжатие в пределах допустимой деформации. При опускании крюка 13 сначала крюк нижним торцом нажимает и утапливает стержень 31 вниз заподлицо с верхней плоскостью плиты 8, затем крюк 13 вместе с плитой 8 и утопленным стержнем опускается вниз и нижним торцом стержня 31 отключает конечный выключатель 33, а затем и 30. В случае установки крюка 13 на какой-нибудь из cтержней 34 стержень 31 не утопится и не включится электрический сигнализатор 33, и не даст сигнал процесс опускания прекратится.
Затем кpюк 13 продолжит опускаться вниз совместно с опорной плитой 8 в крайнее нижнее положение. При этом в крайнем нижнем положении крюка 13 серьги 1 и 2 несколько раскроются, пружины 11 сожмутся, нижние торцы полых направляющих 9 упрутся во фланцы стоек 10, сработает конечный выключатель 30 при наезде нижним концом стержня 31 процесс опускания крюка 13 прекратится. При незначительном опускании опорной плиты 8 вниз, сначала втулка 15 торцом 21 выйдет из контакта с упором 28 и войдет в контакт с ним стороной 23 в паз 19 и повернется на некоторый угол, а фиксатор 29 перейдет из одного паза 25 в другой и зафиксирует втулку 15 от несанкционированного проворота. При подъеме крюка 13 вверх под действием пружин 11 опорная плита 8 перемещается вверх и нижними поверхностями горизонтальных пазов 7 воздействует на ролики 6 и заставляет их катиться и подниматься совместно с серьгами 1 и 2 вверх. Серьги 1 и 2 занимают рабочее положение, опорная плита 8 займет крайнее верхнее положение, пружины 11 будут иметь предварительный натяг и удерживать опорную плиту 8 с серьгами 1 и 2 в крайнем верхнем положении. При подъеме крюка 13 сначала выйдет из контакта стержень 31 с конечным выключателем 30 и погасит сигнал о положении крюка 13 в крайнем нижнем положении, втулка 15 скользя поверхностью 22 паза 19 выйдет из контакта торцом 21 с упором 28 и войдет в контакт с ним поверхностью 23 паза 20. Втулка 15 повернется на некоторый угол и будет скользить по прямому участку 24 паза 20. Фиксатор 29 займет место в другой канавке 25. При дальнейшем подъеме крюка 13 отключается электрический сигнализатор 33, прекращается сигнал о наличии контакта крюка 13 с поверхностью опорной плиты 8, при этом все механизмы стоят. Крюк 13 входит в контакт с серьгами 1 и 2 и происходит подъем груза (изделия) и его транспортирование с помощью крана. При снятии серег 1 и 2 кpюк 13 опускается вниз до соприкосновения с опорной плитой 8, нажимает на стержень 31, срабатывает электрический сигнализатор 33 и дает сигнал о касании крюка 13 с опорной плитой 8.
Затем под действием массы крюка 13 опорная плита 8 опускается вниз, втулка 15 поверхностями 24 паза 20 скользит по упору 28 и при крайнем нижнем положении при входе в паз 19, касаясь поверхностью 23, поворачивается на некоторый угол и входит в паз 19. Фиксатор 29 перейдет из одного паза 25 в другой. Пружины 11 сжаты до расчетной величины, направляющие 9 уперлись в жесткий упор стойки 10, сработал конечный выключатель 30 и дал сигнал о крайнем нижнем положении крюка 13. Серьги 1 и 2 раскрыты на наибольший угол, крюк 13 прекратил опускаться вниз. Затем крюк 13 поднимается вверх и выходит из пределов серег 1 и 2. При этом палец 14 со втулкой 15 слегка поднимается вверх и втулка 15 пазом 23 коснется упора 28, слегка повернется и упор 28 войдет в паз 18 и зафиксирует серьги 1 и 2 в раскрытом виде.
Технико-экономическим преимуществом предлагаемого устройства является повышение надежности, упрощение конструкции, возможность дистанционно надевать серьги на крюк на значительной высоте без участия человека и электрогидроприводов.
Использование: изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватным устройствам, конструктивно сопряженным с крановыми мезанизмами для подъема, опускания или перемещения груза. Сущность изобретения: устройство для дистанционного навешивания на груз содержит сербги 1 и 2, закрепленные посредством осей 3 и 4 в корпусе 5, и установленную подвижно относительно корпуса 5 в вертикальной плоскости опорную плиту 8, выполненную с горизонтальными паузами 7 и двумя вертикальными направляющими 9. Серьги 1 и 2 и опорная плита 8 кинематически связана между собой, размещенными в горизонтальных пазах 7 и закрепленными на боковых стороных серег 1 и 2 роликами 6. В вертикальных направляющих 9 установлены пружины 11, охватывающие стержни 12, закрепленные в корпусе 5. Устройство снабжено сигнализатором 33 положение крюка, включенным в электрическую цепь управления крюком. 3 ил.
УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА, содержащее корпус, в котором посредством осей закреплены серьги, опорную для крюка плиту, установленную подвижно относительно корпуса в вертикальной плоскости и кинематически связанную с серьгами, и фиксатор положения опорной плиты, отличающееся тем, что, с целью повышения надежности, опорная плита выполнена с горизонтальными пазами и двумя вертикальными направляющими, а кинематическая связь серег с опорной плитой представляет собой закрепленные на боковых сторонах серег и размещенные в горизонтальных пазах опорной плиты ролики, при этом устройство снабжено закрепленными на корпусе стержнями, расположенными в вертикальных направляющих опорной плиты, пружинами, размещенными в последних и охватывающими упомянутые стержни, и сигнализатором положения крюка, включенным в электрическую цепь управления крюком.
| Приспособление для навешивания захватного устройства на двурогий крюк крана | 1974 |
|
SU541769A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
