Предлагаемое изобретение относится к области локации и навигации, а именно к импульсным методам определения координат и параметров движения объекта локации, и может быть использовано в локационных системах для определения радиальной скорости и ускорения относительного движения объекта, например, с целью предупреждения столкновений объекта локации и активного контрольного пункта.
Известен импульсный способ определения дальности до объекта локации, основанный на измерении времени запаздывания эхо-сигнала относительно момента излучения зондирующего импульса активным контрольным пунктом и определении величины расстояния до объекта (дистанция до цели) по формуле:
где r - дальность до объекта локации;
с - скорость распространения импульса в среде;
t3 - время запаздывания эхо-сигнала относительно момента излучения зондирующего импульса, [1].
Однако, такой способ обеспечивает определение только дальности до объекта локации и не дает возможности определить другие параметры движения объекта, а именно: радиальную скорость объекта и его ускорение, что существенно сужает функциональные возможности способа.
Известен также импульсный способ измерения радиальной скорости объекта локации в системах со сверхсканированием, включающий излучение пачки импульсов с заданным периодом, прием отраженных импульсов, измерение промежутков времени между началом сканирования луча антенны на прием и окончанием действия i-го принятого отраженного импульса пачки и формирование сигнала, пропорционального величине радиальной скорости объекта в соответствии с заданным выражением [2].
Данный импульсный способ обеспечивает определение радиальной скорости движения объекта при сверхбыстром сканировании с учетом ее тангенциальной составляющей.
Однако, вследствие зависимости интенсивности регистрируемых отраженных сигналов от угла поворота антенны данный способ обусловливает усложненный алгоритм вычисления радиальной скорости, а при движении объекта по одной прямой с измерителем такой способ требует формирования другого пропорционального радиальной скорости сигнала и другого алгоритма ее определения, что приводит к усложнению определения последней и сужению функциональных возможностей способа.
Известен выбранный в качестве прототипа заявленного способа определения параметров движения объекта локации способ измерения радиальной скорости объекта, включающий излучение активным контрольным пунктом пачки импульсов с заданным периодом T0, прием отраженных от объекта импульсов пачки с периодом Tv, определение расстояния до объекта локации по времени запаздывания эхо-сигнала относительно момента начала излучения пачки импульсов и определение радиальной скорости путем формирования сигнала, пропорционального величине радиальной скорости объекта в соответствии с выражением:
где vр - радиальная скорость объекта;
c - скорость распространения импульса в среде;
T0 - период излучения пачки импульсов;
Tv - период прихода пачки отраженных импульсов [3].
Недостатком известного способа прототипа является низкая точность определения параметров движения объекта локации: расстояния и скорости, обусловленная приблизительным алгоритмом их определения по указанной формуле, а также невозможность определения данным способом радиального ускорения движения объекта, приводящая к сужению функциональных возможностей способа.
Кроме того, в данном способе для измерения радиальной скорости объекта локации посылку пачки импульсов с последующей регистрацией эхо-сигнала необходимо проводить не менее двух раз подряд, чтобы измерить время запаздывания эхо-сигналов T0-Tv, что приводит к увеличению длительности определения радиальной скорости объекта локации и сужает функциональные возможности способа.
Известно также устройство для определения параметров движения объекта локации, содержащее передающую и приемную антенну, приемник и блок обработки эхо-сигналов, содержащий определитель дальности с индикатором на электронно-лучевой трубке (ЭЛТ) с линейной разверткой луча или перьевой регистратор. Причем индикатор имеет смещенную отметку эхо-сигнала относительно начала развертки на величину
где l - величина смещения отметки эхо-сигнала;
r - дальность до объекта локации,
с - скорость распространения импульса в среде;
vp - скорость развертки луча (или протяжки пера).
Масштаб шкалы дистанции при этом определен из соотношения:
где m - масштаб шкалы дистанции;
l - величина смещенной отметки эхо-сигнала,
r - дальность до объекта локации;
vp - скорость развертки луча (или протяжки пера);
с - скорость распространения импульса в среде [1].
Недостатком такого устройства является наличие приборной погрешности, вследствие визуального определения измеряемых параметров с помощью ЭЛТ, или инерционности перьевого регистратора, что приводит к снижению точности измерений.
Известно также ближайшее по технической сущности и достигаемому результату к заявленному устройству устройство, содержащее соединенные последовательно блок формирования импульсов в виде синхрогенератора, импульсный передатчик, предающую антенну, приемник и блок обработки эхо-сигналов, блок управления антеннами, измерители временного интервала, триггеры, счетчики делители и микропроцессор для формирования сигнала (кода), пропорционального величине радиальной скорости объекта, при этом выход антенны подключен к выходу антенного переключателя, первый вход которого соединен со входом приемника, выход которого соединен с блоком обработки эхо-сигналов, а его выход - с триггерами, выходы которых соединены с входом измерителя временного интервала, соединенного с входами микропроцессора [2].
Недостатком известного устройства-прототипа является невозможность формирования синхрогенератором в одной пачке разного числа импульсов, что приводит к увеличению длительности измерения параметров движения объекта и, следовательно, сужению функциональных возможностей устройства.
Кроме того, отсутствие измерительных устройств для алгоритма быстрого вычисления радиальной скорости приводит к снижению точности ее определения, а отсутствие измерительных устройств для радиального ускорения делает невозможным его определение.
Техническим результатом предлагаемого изобретения является повышение точности определения параметров движения объекта за счет расчета этих параметров по реальным физическим величинам, а также расширение функциональных возможностей способа и устройства за счет увеличения быстроты измерений параметров и дополнительного определения радиального ускорения.
Технический результат достигается тем, что в способе определения параметров движения объекта локации, включающем излучение активным контрольным пунктом пачки импульсов с заданным периодом, прием отраженных от объекта локации импульсов пачки, определение расстояния до объекта локации по измеренному времени запаздывания эхо-сигнала при его приеме относительно момента начала излучения и определение радиальной скорости объекта, согласно изобретению, при приеме отраженных от объекта локации импульсов пачки дополнительно измеряют величину разности времен запаздывания каждых двух соседних импульсов пачки и рассчитывают изменение расстояния до объекта между моментами контактов первой пары соседних импульсов с объектом локации, по этим величинам определяют его радиальную скорость на данном участке движения, затем таким же образом определяют радиальную скорость движения объекта локации между моментами его контакта с последним импульсом первой пары соседних импульсов и первым импульсом последующей пары соседних импульсов, по разности измеренных радиальных скоростей определяют радиальное ускорение движения объекта и после этого проводят последующую оценку допустимых параметров относительного движения активного контрольного пункта и объекта локации и формируют командные сигналы на изменение числа импульсов в излучаемой пачке.
При этом при оценке определенных величин расстояния, скорости и ускорения как нежелательных параметров относительного движения активного контрольного пункта и объекта локации могут дополнительно формировать командные сигналы для изменения длительности и периода излучаемой пачки.
Кроме того, при оценке определенных величин расстояния, скорости и ускорения как нежелательных параметров относительного движения активного контрольного пункта и объекта локации могут дополнительно формировать командные сигналы для управления движением объекта локации или активного контрольного пункта.
Технический результат достигается также тем, что в устройстве для осуществления способа, содержащем последовательно соединенные задающий генератор пачек импульсов, передатчик и излучающую антенну, последовательно соединенные приемную антенну, приемник, блок обработки эхо-сигналов с измерителем временных интервалов и вычислительное устройство для расчета дальности до объекта локации и его радиальной скорости, блок управления антеннами с приводом, соединенный с одним из выходов блока обработки эхо-сигнала, и генератором, согласно изобретению, задающий генератор пачек импульсов снабжен блоком изменения скважности пачек, а вычислительное устройство снабжено блоком для расчета ускорения движения объекта локации с индикатором ускорения и управляющим вычислительным блоком для оценки допустимых параметров относительного движения объекта локации и активного контрольного пункта, соединенным с блоком изменения скважности пачек и блоком управления антеннами. Кроме того, управляющий вычислительный блок для оценки допустимых параметров относительного движения снабжен дополнительными выходами для соединения с блоком изменения скважности пачек задающего генератора и с блоком управления относительным движением объекта локации.
Дополнительное измерение при приеме отраженных импульсов указанных временных промежутков и расчет изменения указанного расстояния позволяет определить радиальную скорость по реальным физическим величинам, что исключает необходимость в аппроксимированном ее расчете и повышает точность ее определения по сравнению с прототипом.
Определение радиальной скорости по указанным величинам позволяет увеличить быстроту ее определения по сравнению с прототипом, вследствие уменьшения длительности процедуры измерения времени запаздывания эхо-сигнала.
Дополнительное определение указанной радиальной скорости и ее изменение за указанный промежуток времени позволяет также определить радиальное ускорение. Все это позволяет расширить функциональные возможности способа по сравнению с прототипом.
Осуществление последующей оценки допустимых параметров относительного движения активного контрольного пункта и объекта локации и формирования командных сигналов на изменение числа импульсов в пачке позволяет, наряду с определением этих величин, производить излучение пачки с заданным числом импульсов, в зависимости от определяемого параметра, что также обеспечивает расширение функциональных возможностей способа по сравнению с прототипом.
Дополнительное формирование командных сигналов для уменьшения длительности и периода излучаемой пачки и для управления движением объекта локации или активного контрольного пункта при оценке определенных параметров как "нежелательных" позволяет изменять эти параметры до требуемых величин, например, с целью избежания столкновений или аварийных ситуаций, что также расширяет функциональные возможности данного способа по сравнению с прототипом.
Снабжение задающего генератора дополнительным блоком изменения скважности пачек импульсов позволяет обеспечить получение пачки с различным заданным числом импульсов, например 2, 3, и 4, и обеспечить измерение всех параметров объекта излучением только одной пачки, что уменьшает длительность определения последних и расширяет функциональные возможности устройства по сравнению с прототипом.
Снабжение вычислительного устройства дополнительным блоком для расчета ускорения движения объекта и индикатором ускорения, а также управляющим вычислительным блоком для оценки допустимых параметров сближения позволяет обеспечить определение, кроме величины радиальной скорости, величины радиального ускорения и его изменения, а также дать оценку этих параметров на соответствие их заданным критериям допустимости. Это, в итоге, также обеспечивает повышение точности измерения параметров и расширение области применения по сравнению с прототипом.
Снабжение управляющего вычислительного блока для оценки допустимых параметров относительного движения указанными дополнительными выходами обеспечивает при их оценке как критических формирование соответствующих командных сигналов для изменения параметров движения объекта локации или активного контрольного пункта до необходимой контрольной величины и, тем самым, позволяет избежать столкновения или аварийной ситуации, что также увеличивает расширение области применения данного устройства по сравнению с прототипом.
Именно снабжение задающего генератора пачек импульсов блоком изменения скважности пачек, соединенного указанным образом с управляющим вычислительным блоком, а также снабжение вычислительного устройства для расчета величин дальности и радиальной скорости указанными дополнительными блоками обеспечивают, согласно заявляемому способу, формирование командных сигналов на изменение числа импульсов в излучаемой пачке и измерение указанных величин, необходимых для расчета радиальных скорости и ускорения объекта локации, и тем самым достижение технического результата. Это позволяет сделать вывод, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сравнение заявляемых способа и устройства с прототипами позволило установить, что способ отличается операциями приема отраженных импульсов, расчетом и оценкой параметров движения объекта локации, а устройство - выполнением задающего генератора и вычислительного устройства для расчета величин параметров движения объекта, и сделать вывод, что изобретение соответствует критерию "новизна".
При изучении других известных решений в данной области техники признаки, идентичные признакам, отличающим заявляемое изобретение от прототипа, выявлены не были, и потому оно соответствует критерию "изобретательский уровень".
Применение заявляемого изобретения в локационных системах обнаружения для определения радиальной скорости и ускорения объекта локации обеспечивает ему критерий "промышленная применимость".
Предлагаемое изобретение поясняется чертежами, где на фиг. 1 представлена временная диаграмма излучения и приема пачки из трех прямоугольных импульсов C1, C2, C3: а) излучение пачки импульсов C1, C2, C3, T0 - период пачки, Tu - длительность импульса, ΔTu- пауза импульса, Δt- период импульса, ΔTп- длительность излучения пачки.
б) прием отраженных импульсов C1, C2, C3 пачки от неподвижного объекта:
T1, T2, T3 - моменты обнаружения отраженных C1, C2 и C3 импульсов,
в) прием отраженных импульсов C1, C2, C3 пачки при удалении объекта локации от активного контрольного пункта,
г) прием отраженных импульсов C1, C2, C3 пачки при приближении объекта локации к активному контрольному пункту;
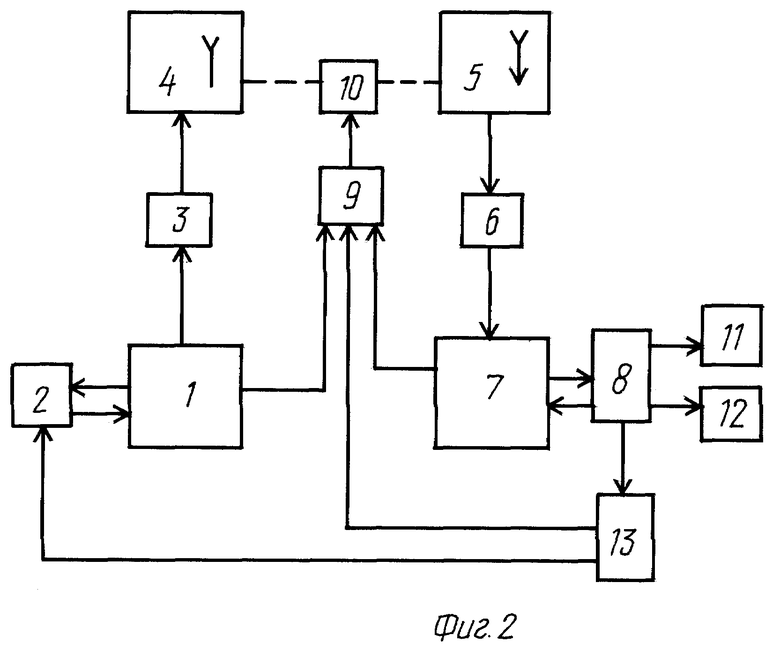
на фиг. 2 - блок-схема устройства для осуществления заявляемого способа;
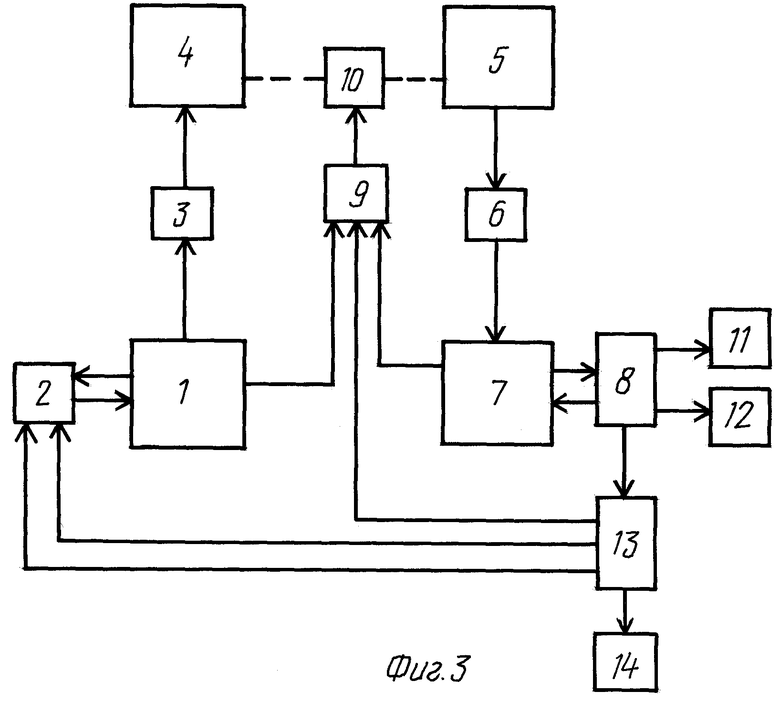
на фиг. 3 - то же, с блоком управления относительным движением объекта локации и активного контрольного пункта.
Предлагаемый способ осуществляют следующим образом.
С помощью излучающей антенны излучают пачку импульсных волновых сигналов с заданным периодом. Первоначально свободное окружающее пространство зондируют пачкой с одиночным импульсным сигналом до момента обнаружения объекта локации и измерения расстояния S до него по измеренному времени задержки Т эхо-сигнала (отраженного сигнала) при его приеме относительно начала излучения пачки импульсов. При этом момент излучения первого сигнала t1 принимают за начало отсчета времени прохождения сигналов до объекта локации и обратно. Скорость прохождения сигналов одинакова и равна v.
При появлении цели в окружающем пространстве формируют командные сигналы на изменение числа импульсов в излучаемой пачке, которое изменяют до двух - для измерения радиальной скорости движения объекта, до трех - для измерения радиального ускорения и до четырех - для измерения изменения этого ускорения.
Прием отраженных импульсов пачки осуществляют приемной антенной. При приеме отраженных импульсов пачки дополнительно измеряют величину разности времен запаздывания каждых двух соседних импульсов пачки и рассчитывают изменение расстояния до объекта между моментами контактов первой пары соседних импульсов с объектом локации, по этим величинам определяют его радиальную скорость на данном участке движения, затем таким же образом определяют радиальную скорость движения объекта локации между моментами его контакта с последним импульсом первой пары соседних импульсов и первым импульсом последующей пары соседних импульсов, по разности измеренных радиальных скоростей определяют радиальное ускорение движения объекта и после этого проводят оценку допустимых параметров относительного движения активного контрольного пункта и объекта локации. При оценке определенных величин расстояния, скорости и ускорения как нежелательных параметров относительного движения активного контрольного пункта и объекта локации дополнительно формируют командные сигналы для управления движением объекта локации или активного контрольного пункта или формируют командные сигналы для изменения длительности и периода излучаемой пачки.
При таком определении параметров движения объекта локации как при высоких, так и малых скоростях объекта, достаточно посылки всего одной пачки импульсов по направлению к объекту для обеспечения необходимой скорости процедуры. При этом одна пачка импульсов обеспечивает неоднократное измерение расстояния до объекта локации. Частота наполнения излучаемых сигналов, их форма и временные характеристики (период следования посылок пачки, длительность сигналов, паузы между ними в пачке и др.) могут меняться в зависимости от конкретных условий работы локационной станции.
Пример.
Радар излучает пачку импульсных волновых сигналов заданной частоты, например три последовательных волновых сигнала (C1, C2 и C3), с периодом, равным Δt, с длительностью Tu и промежутками между ними ΔTu (фиг. 1 а). Если расстояние до цели не изменяется (объект неподвижен), то самый первый сигнал C1 пачки после отражения от цели вернется (фиг. 1 б) к приемнику сигналов через время T1, второй C2 - через время T2 = T1+Δt, а третий C3 - через время T3 = T1+2Δt. При этом все три сигнала пройдут один и тот же путь 2S1, где S1 - расстояние до цели. Совпадение расчетных и экспериментальных величин T2 (или T3) указывает на то, что расстояние от радара до цели с момента контакта цели с сигналом C1 до момента контакта с сигналом C2 (или C3) не изменилось. Величину расстояния S1 рассчитывают из уравнения 2S1=vT1.
Если расстояние до цели изменяется, то самый первый сигнал C1 пачки достигнет цель на расстоянии до нее S1, второй C2 - на расстоянии S2=S1+S1,2, а третий C3 - на расстоянии S3=S1+S1,3. Самый первый сигнал C1 пачки после отражения от цели вернется к приемнику сигналов через время T1, второй C2 - через время T2 = T1+Δt+ΔT2, а третий C3 - через время T3 = T1+2Δt+ΔT3. Фиг. 1в - эхо-сигналы при удалении цели, фиг. 1г - эхо-сигналы при приближении цели. По сравнению с сигналом C1 длина пути сигнала С2 будет отличаться на величину
S1,2 = v1,2•t1,2 = v1,2•0,5•ΔT2,
где v1,2 - относительная средняя радиальная скорость движения цели (а t1,2 - время) между моментами контактов цели с сигналами C1 и C2.
По сравнению с сигналом C2 длина пути сигнала C3 будет отличаться на величину
S2,3 = v2,3•t2,3 = v2,3•0,5•(ΔT3-ΔT2),
где v2,3 - относительная средняя радиальная скорость движения цели (а t2,3 - время) между моментами контактов цели с сигналами C2 и C3.
Тогда:
S1=vT1;
S2 = v(T2+ΔT2-Δt);
S3 = v(T3+ΔT3-2Δt);
S1,2=S2-S1;
S2,3=S3-S2;
v1,2 = 2S1,2/ΔT2;
v2,3 = 2S2,3/(ΔT3-ΔT2);
a1,3=2(v2,3-v1,2)/t1,3
где a1,3 - среднее радиальное ускорение относительного движения цели между моментами контактов цели с сигналами C1 и C3.
Если излучать пачку, содержащую четыре импульса, то аналогичные расчеты позволяют вычислить дополнительно не только среднюю радиальную скорость V3,4 (между моментами контактов цели с сигналами C3 и C4) и среднее радиальное ускорение относительного движения цели а2,4 (между моментами контактов цели с сигналами C2 и C4), но и среднее изменение ускорения
Δa1,4 = 2(a2,4-a1,3)/(t2,4+t1,3)
между моментами контактов цели с сигналами C1 и C4.
Измерение ускорения возможно даже в том случае, если в излучаемой пачке содержится всего лишь два разделенных по времени сигнала. Но для этого необходимо излучить не менее двух пачек сигналов и затем рассчитать относительную радиальную скорость объекта локации вначале по результатам измерения эхо-сигналов для первой пачки сигналов, а затем для второй. После этого по разности измеренных скоростей можно рассчитать радиальное ускорение.
Одновременное определение расстояния до объекта, его радиальной скорости и особенно ускорения дает возможность зафиксировать любые комбинации параметров движения объекта и его сближения с активным контрольным пунктом и быстро сформировать соответствующие командные сигналы для изменения этих параметров движения до необходимой величины.
Так в зоне досягаемости излучателя эхо-сигналами максимальная дальность обнаружения объекта rmax зависит от периода следования посылок пачки T0 (промежутка времени между двумя последовательными излучениями пачки импульсов) и от скорости с распространения сигнала в среде: T0=2rmax/c или rmax= T0c/2. При звуковой локации в воде и с=1500 м/с и если установить T0=0,1с, то максимальная дальность обнаружения (локационной видимости) объекта составит: rmax=0,1•1500/2=75м. Чтобы обнаруживать объект на большей дальности, необходимо увеличить период следования посылок пачки T0 (и длину волны сигнала).
Например, при увеличении периода следования посылок в 10 раз (т.е. при T0=1 с) максимальная дальность обнаружения объекта так же возрастет в 10 раз и составит: rmax=1•1500/2=750 м. Если на такой максимальной дальности (750 м) обнаружен объект (цель), приближающийся к активному излучателю со скоростью 10 м/с, то за каждую секунду сближения путь зондирующего сигнала от излучателя до объекта локации уменьшается на 10 м, а время от момента излучения сигнала до момента приема эхо-сигнала уменьшается на 13,2 мс, так как 2•10/(1500+10)= 0,0132 с. Поэтому, если период повторения пачки зондирующих сигналов T0= 1 с, то первый сигнал у каждой последующей пачки будет возвращаться (в виде эхо-сигнала) на 13,2 мс раньше, чем у предыдущей. За время сближения объекта с исходного расстояния 750 м до расстояния 150 м (20% от исходного) при указанных условиях будет получена информация от 60 пачек зондирующих импульсов (600/10=60 с). При сближении с объектом на достаточно близкое расстояние, например, на расстояние, составляющее 20% от максимальной дальности обнаружения, целесообразно уменьшить в 5-20 раз период следования посылок пачки T0 и уменьшить длительность излучения пачки Tп (за счет уменьшения длительности импульсов Tu и промежутков между ними ΔTu).
Если же в процессе локации будет зафиксирована такая комбинация параметров сближения (расстояние, скорость, ускорение), которая программой расчетов оценивается как опасная (нежелательная), то формируется известным способом командный сигнал для необходимого изменения параметров относительного движения объекта и активного контрольного пункта.
На фиг. 2 изображено устройство для осуществления предлагаемого способа.
Устройство содержит последовательно соединенные задающий генератор 1 пачек импульсов, блок 2 изменения скважности пачек (Q = T0/Tп, где Q - скважность пачки; T0 - период пачки; Tп - длительность пачки), передатчик 3 и излучающую антенну 4, последовательно соединенные приемную антенну 5, приемник 6, блок 7 обработки эхо-сигналов и вычислительное устройство 8 для расчета величин дальности до объекта локации и его скорости, а также блок 9 управления антеннами с приводом 10, соединенным с излучающей 4 и приемной 5 антеннами. Блок 9 управления антеннами 4 и 5 соединен с выходом блока 7 обработки эхо-сигналов, с генератором 1 и с выходом вычислительного блока 13. Блок 7 обработки эхо-сигналов снабжен измерителем временных интервалов и измерителем расстояния (на чертеже не указаны), а вычислительное устройство 8 снабжено индикаторами скорости 11 и ускорения 12, а также дополнительным управляемым вычислительным блоком 13 для оценки допустимых параметров.
По варианту, изображенному на фиг. 3, управляемый вычислительный блок 13 также включает дополнительные выходы для соединения с блоком 2 изменения скважности пачек и с блоком 14 управления относительным движением объекта локации и активного контрольного пункта, соединенный например, с приводом последнего (на черт. не указан).
Устройство работает следующим образом.
Генератор импульсов 1 вырабатывает с помощью блока 2 изменения скважности пачек пачку импульсов (с периодом повторения T0), состоящую, например, из двух или более (трех, четырех) импульсов с заданными временными интервалами между импульсами ΔTu, и подает ее на передатчик 3 и затем на передающую антенну 4. Для передачи сигналов в заданном направлении и приема максимальных эхо-сигналов с блока 13 подается командный сигнал на блок 2 изменения скважности пачек и через блок 9 управления антеннами на привод излучающей антенны 4 и приемной антенны 5. Пришедший на антенну 5 эхо-сигнал через приемник 6 подается на вход блока 7 обработки эхо-сигналов, где производится измерение и регистрация времени приема эхо-сигналов, направления на объект локации, измерение (расчет) расстояния до объекта, с передачей информации на вычислительное устройство 8 для расчета (по величинам временных интервалов между импульсами) скорости и ускорения относительного движения объекта локации. С вычислительного устройства 8 рассчитанная величина скорости передается на индикатор скорости 11, а рассчитанная величина ускорения - на индикатор ускорения 12.
По варианту устройства, изображенного на фиг. 3, результаты измерений с вычислительного устройства 8 подаются на управляющий вычислительный блок 13, который формирует: командные сигналы управления относительным движением активного контрольного пункта и объекта локации, корректирующие сигналы управления работой генератора импульсов 1, через блок 2 и корректирующие сигналы управления работой блока 9 управления антеннами. С вычислительного блока 13 сформированные командные сигналы подаются на блок 14 управления относительным движением объекта локации и активного контрольного пункта, где они преобразуются и передаются на приводы управления движением. Сформированные корректирующие сигналы передаются с дополнительного выхода управляющего вычислительного блока 13 на блок 2 изменения скважности пачек для изменения длительности излучения пачки Tп и периода излучения T0 и на блок 9 управления антеннами.
Таким образом, предлагаемое изобретение позволяет по сравнению с прототипом повысить точность измерений параметров движения объекта за счет расчета этих параметров по реальным физическим величинам и оценки параметров по моментам времени, соответствующим его истинной дальности и скорости, а также расширение области его применения, вследствие быстроты измерений параметров увеличения объема информации о движущемся объекте.
Кроме того, данное изобретение не требует дополнительной дорогостоящей аппаратуры для сравнительного частотного анализа излучаемого и отраженного сигналов. Оно применимо для надежного измерения не только высоких, но и малых скоростей объекта.
Совместное определение не только расстояния до объекта, его радиальной скорости и радиального ускорения с его изменением позволяет быстро формировать соответствующие командные сигналы для управления движением активного транспортного средства (оснащенного излучателем) и объекта локации, например для безопасного причаливания судов или для избежания столкновений с объектом локации.
Источники информации
1. Евтюхов А. П. , Колесников А.Е., Корепин Е.А. и др. Справочник по гидроакустике, 2-е издание, Л., Судостроение, 1988 г., стр. 16.
2. Авторское свидетельство СССР N 1809399, G 01 S 1/14, 1993 г., БИ N 14.
3. Гинзбург В. М. Формирование и обработка изображений в реальном времени. Методы быстрого сканирования. М., Радио и связь, 1986 г., с. 34 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА ЛОКАЦИИ | 1999 |
|
RU2163723C1 |
| СПОСОБ ИССЛЕДОВАНИЯ СРЕДЫ | 2003 |
|
RU2269141C2 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
Изобретение относится к области локации и навигации, а именно к импульсным методам определения координат и параметров движения объекта локации. Техническим результатом изобретения является повышение точности определения параметров движения объекта, а также расширение функциональных возможностей способа и устройство за счет увеличения быстроты измерений параметров и дополнительного определения радиального ускорения. Способ включает излучение активным контрольным пунктом пачки импульсов с заданным периодом, прием отраженных от объекта локации импульсов пачки, определение расстояния до объекта локации по измеренному времени запаздывания эхо-сигнала при его приеме относительно момента начала излучения пачки и определение радиальной скорости объекта. При приеме отраженных от объекта локации импульсов пачки дополнительно измеряют величину разности времен запаздывания каждых двух соседних импульсов пачки и рассчитывают изменение расстояния до объекта между моментами контактов первой пары соседних импульсов с объектом локации, по этим величинам определяют его радиальную скорость на данном участке движения, затем таким же образом определяют радиальную скорость движения объекта локации между моментами его контакта с последним импульсом первой пары соседних импульсов и первым импульсом последующей пары соседних импульсов, по разности измеренных радиальных скоростей определяют радиальное ускорение движения объекта, после этого проводят оценку допустимых параметров относительного движения активного контрольного пункта и объекта локации и формируют командные сигналы на изменение числа импульсов в излучаемой пачке. Кроме того, при оценке определенных величин расстояния, скорости и ускорения как нежелательных параметров относительного движения активного контрольного пункта и объекта локации дополнительно формируют командные сигналы для изменения длительности и периода излучаемой пачки или формируют командные сигналы для управления движением объекта локации или активного контрольного пункта. Устройство для осуществления способа содержит последовательно соединенные задающий генератор 1 пачек импульсов, передатчик 3 и излучающую антенну 4, последовательно соединенные приемную антенну 5, приемник 6, блок 7 обработки эхо-сигналов с измерителем временных интервалов и вычислительное устройство 8 для расчета дальности до объекта локации и его радиальной скорости, блок управления антеннами 9 с приводом 10, соединенный с одним из выходов блока 7 обработки эхо-сигнала, и генератором 1. Задающий генератор 1 пачек импульсов снабжен блоком 2 изменения скважности пачек, а вычислительное устройство 8 - индикаторами скорости 11 и ускорения 12 и управляющим вычислительным блоком 13 для оценки допустимых параметров относительного движения объекта локации и активного контрольного пункта, соединенный с блоком 2 изменения скважности пачек и блоком 9 управления антеннами. Кроме того, управляющий вычислительный блок 13 для оценки допустимых параметров относительного движения снабжен дополнительными выходами для соединения с блоком 2 изменения скважности пачек и блоком 14 управления относительным движением объекта локации и активного контрольного пункта, расположенного на транспортном средстве. 2 с. и 3 з.п. ф-лы, 3 ил.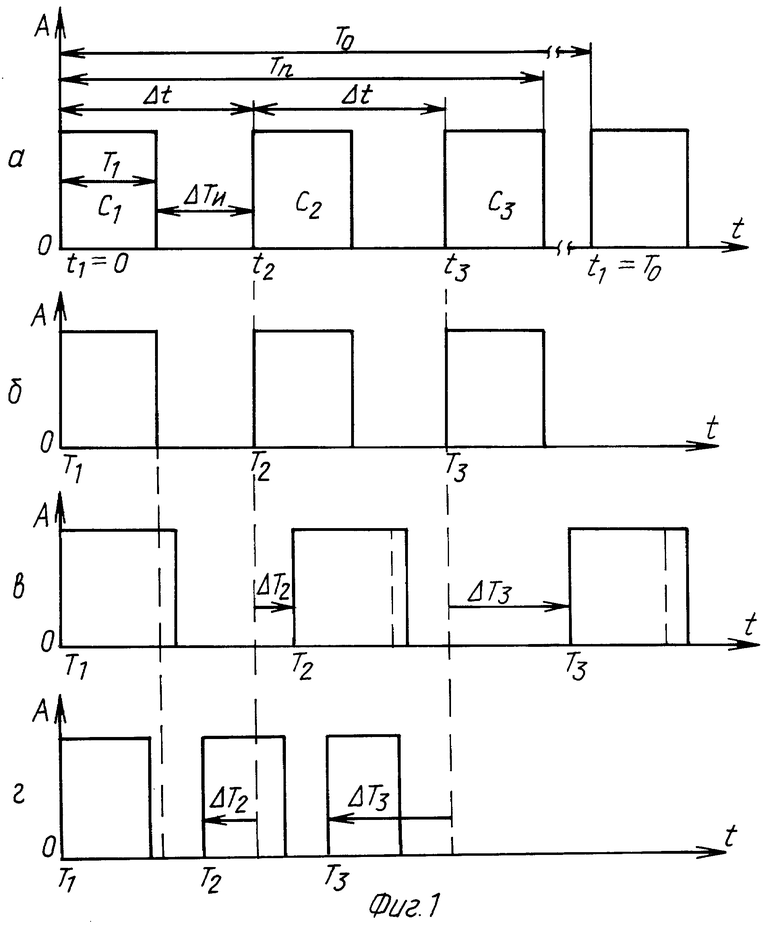
| ГИНЗБУРГ В.М | |||
| Формирование и обработка изображений в реальном времени | |||
| Методы быстрого сканирования | |||
| - М.: Радио и связь, 1986, с.34 | |||
| Способ определения тангенциальной составляющей скорости объекта | 1991 |
|
SU1809400A1 |
| Способ стимуляции репарации роговицы | 1990 |
|
SU1773401A1 |

