Изобретение относится к области радиотехники, в частности к системам первичной обработки информации бортовых радиолокационных станций (РЛС), которые устанавливаются в носовой части летательного аппарата (ЛА) в режиме обнаружения цели.
Наличие боковых лепестков диаграммы направленности антенны, при движении цели, приводит к расширению спектра отражений от подстилающей поверхности (ПП), что приводит к увеличению мощности пассивной помехи и соответственно к снижению вероятности правильного обнаружения целей.
При отражении, излученной пачки импульсов в окрестности частоты повторения импульсов FП формируется спектр отражений от подстилающей поверхности, периодически повторяющийся на частотах кратных FП. Для формирования области частот свободной от препятствующих обнаружению полезных сигналов отражений от ПП в бортовых РЛС применяют режим высокой частоты повторения (ВЧП) и в некоторых случаях средней частоты повторения (СЧП) импульсов.
Предлагаемое изобретение относится к радиолокации и может быть использовано в радиолокационной технике, в системах обработки первичной радиолокационной информации, для обнаружения цели в импульсно-доплеровских радиолокационных станциях (ИД РЛС).
В ИД РЛС цели облучаются радиоимпульсами, излучаемыми с определенной частотой повторения. При отражении от движущейся воздушной цели несущая частота радиоимпульсов сдвигается на величину равную частоте Доплера. Знак этой величины определяется направлением движения цели относительно РЛС. Частота повторения радиоимпульсов выбирается из условия однозначности измерения скорости.
Известен способ обнаружения радиоконтрастных объектов (РКО) и измерения их координат [1]: углов визирования РКО, дальности до них, скорости и ускорения сближения с ними. Недостатком является сужение зоны свободной от помех при высокой скорости полета носителя РЛС.
Известен способ измерения дальности в импульсно-доплеровских радиолокационных станциях [2], заключающийся в том, что излучают линейно - частотно - модулированное (ЛЧМ) радиоимпульсы с крутизной, обеспечивающей однозначное измерение дальности до любого ЛА, находящегося в пределах дальности действия РЛС. По принятым радиосигналам осуществляют грубое измерение дальности до всех обнаруженных ЛА и их скорости; снова излучают ЛЧМ радиоимпульсы, но с крутизной, обеспечивающей требуемое разрешение ЛА по дальности и скорости; по принятым радиосигналам точно измеряют неоднозначные дальности до всех обнаруженных ЛА и их скорости, используя которые и грубые измеренные значения дальности, вычисляют точное значение дальности до каждого обнаруженного ЛА. Недостатком является сужение зоны свободной от помех при высокой скорости полета носителя РЛС.
Из известных технических решений наиболее близким (прототипом) является способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех [3]. Во время подготовительного временного интервала работы РЛС, производится сбор данных о карте помех, отражающихся в разных угловых направлениях рабочего сектора, с оценкой энергетического дальностно-скоростного распределения пассивных помех. На основе полученной помеховой карты определяются угловые направления с узкополосными энергетическими спектрами пассивных помех, и затем уточняются параметры используемых в этих направлениях зондирующих локальных сигналов и характеристики их обработки. В процессе поиска и обнаружения целей, в угловых направлениях с интенсивными пассивными помехами, многократно формируются и направляются регулярные квазинепрерывные сигналы различной частоты повторения импульсов. Значения ЧПИ (числа импульсов в пачке), количество и длительность которых позволяют обеспечить полноту охвата требуемого диапазона дальности обнаружения целей, достаточное качество подавления помех и однозначность определения скорости обнаруживаемых целей. Эти сигналы принимаются соосно в паузах работы передатчика РЛС, после чего обрабатываются корреляционно-фильтрованным методом по дальности и скорости с использованием многоканального стробирования, режекции помех с нулевой доплеровской частотой, взвешивания с учетом помех и многоканальной доплеровской фильтрации. В результативном цикле обнаружения цели на фоне узкополосного шума, производятся измерения частотно-временных параметров обнаруженного эхо-сигнала. Затем осуществляется дальнометрический цикл зондирования цели с использованием сигнала с ЛЧМ. Принимаемые эхо-сигналы подвергаются корреляционно-фильтровой обработке и снова обнаруживаются. Затем измеряются уровни мощности обнаруженных локальных максимумов эхо-сигнала и его частотный сдвиг. После этого производится идентификация главного максимума эхо-сигнала и оценка его временного сдвига, который затем пересчитывается в оценку дальности цели. Отличительной особенностью данного метода является то, что число импульсов в пачке (ЧПИ) и скорость линейной частотной модуляции несущей частоты сигнала в измерительном цикле зондирования согласовываются с оценками однозначных измерений. Далее рассматривается (пункт 2) способ, в котором многоканальная корреляционно-фильровая обработка целевых и помеховых эхо-сигналов в каждом канале стробирования производится на эквидистантных частотах. Обработка производится согласно формулам для прореженного эквидистантного ряда частот. В пункте 3 рассматривается временной сдвиг целевого эхо-сигнала по формуле, включающее в себя квадратированные сигнальные отсчеты профильтрованного эхо-сигнала, частоту и период следования импульсов, двухиндексную нумерацию подканалов узкополосной доплеровской фильтрации и другие параметры. Далее, в пункте 4, описан способ, в котором при пропуске цели в первом измерительном цикле производится повторный цикл с временной задержкой. Задержка зависит от длительности импульсов, рабочей частоты РЛС и оценки доплеровского сдвига эхо-сигнала.
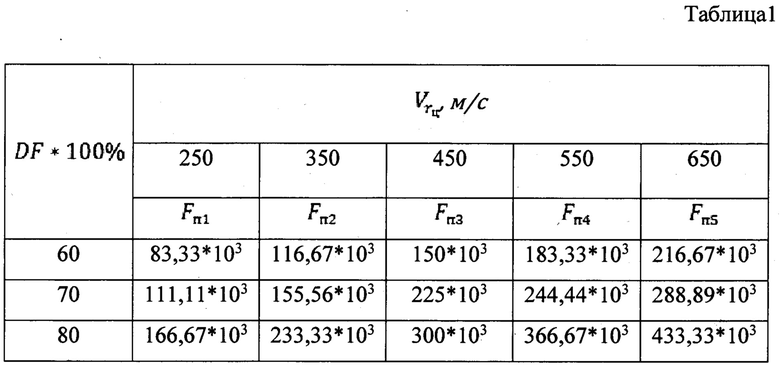
Сущность заявляемого способа и возможность его осуществления представлены на фигуре 1 представлена обобщенная структурная схема устройств обработки радиолокационной информации (РЛИ), в котором реализован заявленный способ, где обозначено:
1 - антенна;
2 - циркулятор;
3 - оконечный выходной СВЧ-усилитель мощности (ВУМ) зондирующих посылок;
4 - импульсный модулятор;
5 - формирователь СВЧ несущей и гетеродинного сигнала;
6 - высокостабильный генератор опорной частоты;
7 - формирователь импульсов запуска передатчика (ИЗП);
8 - многоотводная цифровая линия задержки (ЦЛЗ);
9 - схема бланкирования радиоприемника на время излучения зондирующих посылок;
10 - единый для всех радиоприемных каналов (РПрК) входной приемоусилительный блок;
11.1-11.N - схемы стробирования РПрК;
12.1…12.N - полосно-пропускающие фильтры (ППФ) промежуточной частоты (ПЧ);
13.1…13.N - гребенчатые режекторные фильтры (ГРФ);
14.1…14.N - главные усилители сигналов промежуточной частоты (УПЧ);
15.1…15.N - аналого-цифровые преобразователи (АЦП);
16.1…16.N - буферные оперативные запоминающие устройства (ОЗУ);
17.1…17.N - сигнальные процессоры быстрого преобразования Фурье (БПФ);
18 - блок первичной обработки информации (ПОИ);
19 - блок вторичной обработки информации (ВОИ);
20 - цифровой вычислительный комплекс (ЦВК);
21 - синхронизатор;
22 - доплеровский измеритель скорости и угла сноса (ДИСС);
23 - датчик азимута цели (ДАЦ);
24 - датчик угла места (ДУМЦ).
Принцип построения и функционирования ИД РЛС по приводимой блок-схеме аналогичен рассмотренным в прототипе [3] за исключением их корректировки, связанной с вводом дополнительных блоков доплеровского измерителя скорости и угла сноса (ДИСС), датчика азимута цели (ДАЦ), датчика угла места цели (ДУМЦ), а также регулированием зоны свободной от ПП (DF), информация с которых используется для управления частотой повторения зондирующих импульсов в соответствии с ниже приведенным алгоритмом.
Блок-схемное построение ИД РЛС предусматривает возможность ее многоэтапного многорежимного функционирования:
- на подготовительном этапе, предшествующем выполнению обзорно-поисковых операций, производится формирование помеховой «карты», которая может периодически обновляться и уточняться на последующих этапах работы ИД РЛС;
- на этапе выполнения обзорно-поисковых операций - последовательное во времени лоцирование поискового пространства в разрешаемых угловых направлениях с традиционным использованием регулярных КНС разной высокой ЧПИ в отсутствие частотной модуляции их СВЧ несущей;
- на этапе первичных дальностных измерений обнаруженных целей их повторное лоцирование в соответствии с предлагаемым способом.
Организация функционирования ИД РЛС в перечисленных режимах осуществляется путем соответствующего конфигурирования ее аппаратного и программного обеспечения, изменения начальных установок параметров формируемых зондирующих и служебно-технологических (командно-управляющих) сигналов, а так же характеристик приемообработки регистрируемого потока локационных сигналов. В кратком изложении организация функционирования ИД РЛС характеризуется следующими особенностями, обусловленными реализуемым способом первичной дальнометрии целей.
На подготовительном этапе в отсутствие излучения РЛС производятся измерения начальных уровней внутриканальных шумов РПрК РЛС, а затем при включенном передатчике и сканировании приемопередающим лучом антенны в заданном рабочем секторе с использованием КНС с монохромной несущей в режиме низкой ЧПИ с предельно малой длительностью зондирующих посылок производится измерение энергетических уровней мешающих отражений (помеховой «карты») в зоне обзора ИД РЛС. Спектрально-энергетические измерения внутриканальных шумов РПрК и помеховых переотражений осуществляются с использованием линейной матрицы цифровых сигнальных процессоров (ЦСП) БПФ (блоки 17.1…17.N) с установкой от ЦБК 20 количества сигнальных отчетов, типа оконной противопомеховой обработки, частотного разрешения и полосы спектрального анализа. В указанном режиме обеспечивается однозначность дальностной и частотной разверток формируемого помехового «рельефа» и оценка блоком первичной обработки информации (ПОИ) 18 уровней загрубления чувствительности РПрК, запоминаемых в ЦВК 20.
Поиск и обнаружение целей в помехонасыщенных угловых направлениях с локально сосредоточенным энергетическим спектром ПП выполняется с применением КНС также с монохромной немодулированной несущей в режиме высокой ЧПИ, значение которой устанавливается ЦВК 20 из условия однозначных измерений доплеровских сдвигов эхо-сигналов обнаруживаемых целей.
Излучение, прием и обработка КНС осуществляется по традиционной корреляционно-фильтровой схеме [4, 5]. В частности, согласно фиг. 1, в ИД РЛС для приема и корреляционно-фильтровой обработки локационных эхо-сигналов предусмотрен единый для всех РПрК матричного приемника приемо-усилительный блок 10, линейка стробируемых РПрК 11.1…11.N, в которых производится основное усиление сигналов, их предварительная полосовая частотная фильтрация блоками 12.1…12.N для выделения поискового диапазона доплеровских частот целевых эхо-сигналов, а также предварительная частотная режекция помеховых сигналов фильтрами 13.1…13.N. Каждый РПрК выходом подключен к АЦП 15.1…15.N, являющегося связующим элементом между РПрК и программируемыми ЦСП в составе БЗУ 16.1…16.N, многопроцессорной линейки спектрально-гармонических анализаторов БПФ с весовым окном по входу, линейки пороговых обнаружителей 17.1…17.N, измерителей частотных сдвигов локальных максимумов обнаруженного целевого эхо-сигнала. Частотная полоса процессоров БПФ 17.1…17.N по команде с ЦВК 20 устанавливается в зоне поиска целевых эхо-сигналов.
По установлению факта обнаружения цели блоком ПОИ 18 в текущем угловом элементе разрешения сектора обзора совместно с процедурой ее обнаружения в этом же блоке осуществляются необходимые для проведения последующего измерительного цикла зондирования первичные измерения, по результатам которых формируются оценки: однозначного доплеровского сдвига обнаруженного целевого эхо-сигнала и неоднозначного временного сдвига обнаруженного целевого эхо-сигнала.
Перечисленная измерительная информация поступает в ЦВК 20, где в соответствии с (4, 7, 10) пересчитывается в систему исходных данных и начальных установок функциональных элементов ИД РЛС для проведения в целевом угловом элементе разрешения дальностно-измерительного цикла зондирования с использованием КНС с модулированной СВЧ несущей.
Для реализации приема и обработки эхо-сигналов в измерительном цикле зондирования в приводимом на фиг. 1 блок-схемном построении ИД РЛС также задействован классический корреляционно-фильтровой принцип обработки сигналов [1, 2, 9]. Согласно последнему в частотном преобразователе ПУБ 10 приемника ИД РЛС предусмотрена частотная демодуляция принимаемых сигналов в монохромные колебания ПЧ с сохранением их огибающей с использованием ЛЧМ гетеродинного сигнала, крутизна частотного свипирования которого аналогична ЛЧМ несущей зондирующего сигнала. Диапазон свипирования частоты гетеродина в составе формирователя 5 превышает значение девиации несущей частоты КНС и достаточен для демодуляции эхо-сигналов с максимально возможного удаления их источников от ИД РЛС.Благодаря этому удается обузить (компрессировать) спектр анализируемых эхо-сигналов и реализовать предварительную аналоговую частотную режекцию помеховых сигналов нулевой доплеровской частоты (НДЧ), обусловленных отражениями из ближней непросматриваемой зоны действия ИД РЛС.
С переходом в режим первичных дальностных измерений при сохранении многоканальной аналоговой аппаратной части подсистемы приемообработки сигналов программно-алгоритмическое обеспечение этой подсистемы претерпевает следующие изменения: по выходу каждого стробируемого РПрК в обзорно-поисковой корреляционно-фильтровой матрице осуществляемый с помощью линейной матрицы процессоров БПФ 17.1…17.N спектральный анализ производится не из условия сплошного перекрытия поисковой частотной полосы в каждом стробируемом РПрК, а на прореженном выборочном эквидистантном ряде частот
В процессе обработки результатов многоканальной доплеровской фильтрации блоком ПОИ 18 формируются пороги обнаружения, селектируются сигналы превышения этих порогов, выделяется группа обнаруженных локальных максимумов профильтрованного целевого эхо-сигнала, селектируется главный максимум целевого эхо-сигнала, частотный сдвиг которого пересчитывается ЦВК 20 в искомую однозначную дальность до цели.
Недостатком прототипа является сужение зоны свободной от помех при высокой скорости полета носителя РЛС, т.к. скорость движения носителя РЛС не учитывается при формировании зондирующих импульсов, частота следования которых влияет на зону свободную от помех от ПЛ.
Ширина области частот свободной от помех от ПП зависит от соотношения частоты повторения импульсов пачки FП и доплеровского смещения частоты, вызванного движением носителя РЛС. Степень расширения спектра зависит от скорости носителя РЛС.
Важной задачей является выбор частоты повторения, так как именно он определяет в каких пределах происходит слияние спектральных зон, а когда образуются свободные зоны. Меняя частоту повторения, мы можем регулировать зону свободную от пассивных помех. Для того, чтобы спектр отраженных сигналов цели находился в этой свободной от помех зоне, необходимо соблюдать равенство: f0+Fдmax<f0+Fдцmax>f0+Fп-Fдmax, где f0 - несущая частота, Fп - частота повторения, которая определяется как  с - скорость света, D - однозначная максимальная дальность. Максимальное значение доплеровского смещения частоты отраженного сигнала, вызванное движением носителя РЛС определяется как
с - скорость света, D - однозначная максимальная дальность. Максимальное значение доплеровского смещения частоты отраженного сигнала, вызванное движением носителя РЛС определяется как  где v - радиальная скорость носителя РЛС относительно отражающего объекта, λ - длина волны РЛС.
где v - радиальная скорость носителя РЛС относительно отражающего объекта, λ - длина волны РЛС.
Участок спектра с нулевой доплеровской частотой, соответствует отражениям от подстилающей поверхности расположенной по линии высоты носителя (так называемыми, альтиметровыми отражениями). Наибольшая интенсивность отражений от ПП происходит по главному лепестку диаграммы направленности антенны (ДНА) и доплеровская частота этих отражений определяется как  где α и β - соответственно углы между осью носителя РЛС и центром главного лепестка ДНА в горизонтальной (по азимуту) и вертикальной (углу места) плоскостях.
где α и β - соответственно углы между осью носителя РЛС и центром главного лепестка ДНА в горизонтальной (по азимуту) и вертикальной (углу места) плоскостях.

На фиг. 2 показан типовой спектр отражений от ПП для непрерывного сигнала.
При импульсно-пачечном сигнале, используемом в БРЛС, спектр сигнала становится периодическим (фиг. 3) и в зависимости от частоты повторения импульсов и скорости носителя РЛС спектры отражений от ПП могут при невыполнении условия (1) перекрываться, при выполнении этого условия не перекрываться, обеспечивая зону свободную от помех (фиг. 4).
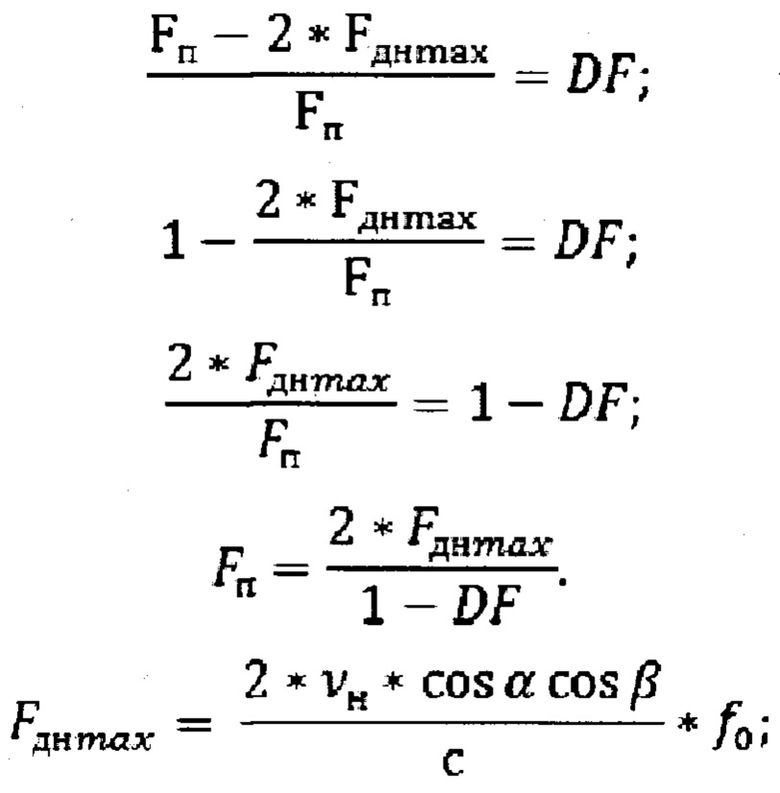
Важно сформировать как можно большую зону свободную от ПП, в пределах которой будет обеспечиваться наиболее эффективное обнаружение сигналов целей. Размеры такой свободной от ПП зависят как от частоты повторения импульсов, так и от скорости носителя. Характеризуя размер такой зоны относительной полосой частот в пределах интервала периодичности DF, определяемого частотой повторения импульсов, и фиксируя его получим следующие соотношения, лежащие в основе управления частотой повторения импульсов, которая обеспечивает постоянство зоны свободной от помех.
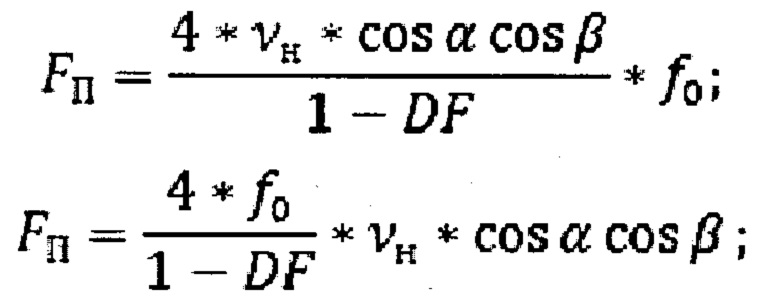
νrц=νц*cosαcosβ;
vц - получаем с доплеровского измерителя скорости и угла сноса (ДИСС);
α - угловое положение антенны РЛС в горизонтальной плоскости поступает с датчика азимута цели (ДАЦ);
β - угловое положение антенны РЛС в вертикальной плоскости, поступающее с датчика угла места цели (ДУМЦ).
Так, если DF=ОД то Fп=5*Fднmax или 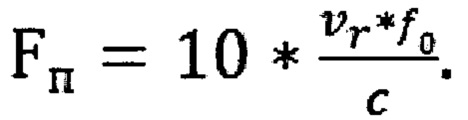
В таблице 1 приведены расчетные значения частоты повторения импульсов для различных радиальных скоростей цели и при задании относительных размеров зоны свободной от помех от ПП в пределах от 60% до 80% от частоты повторения, что обеспечивает в этой зоне более высокую вероятность обнаружения целей.
Из таблицы 1 мы видим, что с увеличением зоны свободной от пассивных помех, вызванных отражениями от земной поверхности и радиальной скорости цели  приводит к увеличению значения частоты повторения импульсов.
приводит к увеличению значения частоты повторения импульсов.
Источники информации
1. https://yandex.ru/patents/doc/RU2268479C1_20060120
2. https://patents.google.com/patent/RU2296346C2/ru
3. https://patents.google.com/patent/RU2641727C1/ru
4. Справочник по радиолокации. Под ред. М. Сколника, т. 3. М.: Сов. радио. 1979, 527 с.
5. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. М.: Радио и связь, 1986, 288 с.
Изобретение относится к импульсно-доплеровским бортовым радиолокационным системам первичной обработки сигналов. Техническим результатом изобретения является обеспечение более высокой вероятности обнаружения целей в зоне, свободной от пассивных помех. Частотный диапазон отражений от земной поверхности по боковым и главному лепесткам диаграммы направленности антенны зависит от скорости полета носителя радиолокационной станции. При увеличении скорости носителя недопустимо сужается диапазон скоростей целей, незамаскированных пассивной помехой. Это приводит к снижению вероятности правильного обнаружения целей и недопустимому уменьшению дальности действия радиолокационной станции. Для решения этой проблемы в заявленном способе изменяют частоту повторения зондирующих импульсов, сохраняя фиксированный диапазон доплеровских скоростей, неперекрывающийся с пассивной помехой. Это позволяет улучшить условия для обнаружения полезных сигналов и повысить дальность действия импульсно-доплеровских радиолокационных станций. 4 ил., 1 табл.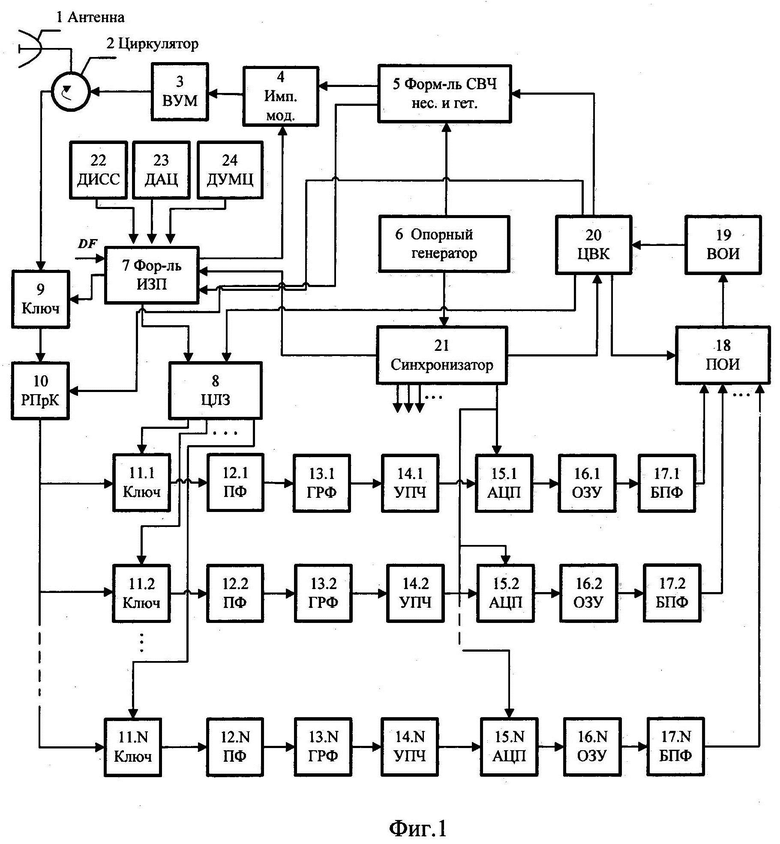
Способ первичной импульсно-доплеровской дальнометрии целей на фоне узкополосных пассивных помех (ПП), состоящий в том, что на подготовительном временном интервале работы импульсно-доплеровской радиолокационной станции (РЛС) производят снятие помеховой карты мешающих отражений с оценкой в каждом угловом направлении рабочего сектора энергетического дальностно-скоростного распределения ПП, по данным помеховой карты определяют помехонасыщенные сектора с узкополосным энергетическим спектром ПП и уточняют параметры применяемых в этих секторах зондирующих локационных сигналов и характеристик их приемообработки, в процессе поиска и обнаружения целей в угловых направлениях, характеризующихся наличием интенсивных ПП, n-кратно формируют и направленно излучают регулярные квазинепрерывные сигналы (КНС) разной высокой частоты повторения импульсов (ЧПИ), значения ЧПИ, количество и длительность которых удовлетворяют условиям обеспечения полноты перекрытия требуемого диапазона дальностей обнаружения целей, достаточности реализуемого качества помехоподавления и однозначности скоростного местоопределения обнаруживаемых целей, соосно-направленно принимают в паузах работы передатчика РЛС целевые и помеховые эхо-сигналы с последующей их многоканальной по дальности и скорости корреляционно-фильтровой времячастотной обработкой путем многоканального стробирования, частотной режекции помеховых сигналов нулевой доплеровской частоты, противопомехового взвешивания и многоканальной доплеровской фильтрации, в результативном цикле импульсно-доплеровского обнаружения, в котором произошло обнаружение цели на фоне узкополосных ПП, производят измерения времячастотных параметров профильтрованного обнаруженного целевого эхо-сигнала с оценкой его однозначного доплеровского и неоднозначного временного сдвигов, а затем производят дальностно-измерительный цикл зондирования обнаруженной цели с использованием КНС с линейной частотной модуляцией (ЛЧМ) его несущей частоты, в котором принимаемые эхо-сигналы также подвергают многоканальной времячастотной корреляционно-фильтровой обработке, повторно обнаруживают целевой эхо-сигнал, измеряют уровни мощности превысивших порог обнаружения локальных максимумов профильтрованного целевого эхо-сигнала, а также его однозначный частотный и неоднозначный временной сдвиг, после чего производят идентификацию главного максимума профильтрованного целевого эхо-сигнала и оценку его однозначного временного сдвига с последующим ее пересчетом в оценку дальности обнаруженной цели, отличающийся тем, что с целью сохранения фиксированной ширины зоны доплеровских частот, свободной от помех от подстилающей поверхности (DF), в формирователь импульсов запуска передатчика дополнительно введена информация о радиальной скорости цели, поступающая с доплеровского измерителя скорости и угла сноса (ДИСС), об угловом положении цели в горизонтальной плоскости, поступающая с датчика азимута цели (ДАЦ), угловом положении цели в вертикальной плоскости, поступающая с датчика угла места (ДУМЦ), и задаваемая оператором фиксированной или переменной относительная величина зоны, свободной от помех от подстилающей поверхности.
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОКОНТРАСТНЫХ ОБЪЕКТОВ И ИЗМЕРЕНИЯ СКОРОСТИ И УСКОРЕНИЯ СБЛИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НИМИ | 2004 |
|
RU2268479C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| JP 2021099244 A, 01.07.2021 | |||
| Конусный затвор для напорного водовода | 1976 |
|
SU791838A1 |

