Изобретение относится к области исследования, осуществляемого путем зондирования пространства с помощью радио или акустических сигналов, и может быть использовано при определении неоднородностей исследуемой среды, а также наличия объектов.
Широко известный способ исследования окружающей среды путем радиолокации, основанный на излучении зондирующего сигнала, представленного в виде следующих с определенным интервалом импульсов, приеме отраженного сигнала и измерении его параметров [1].
Для формирования зондирующего сигнала может быть использован способ, обеспечивающий генерацию последовательности (пачки) неэквидистантных импульсов, путем позиционно-импульсного кодирования последовательности [2]. При этом для получения зондирующего сигнала, имеющего автокорреляционную функцию с малым уровнем боковых лепестков, требуется задавать определенные интервалы следования импульсов, изменяя их, например, случайным образом. Естественно, для последовательности большой длительности возможно разделение импульсов на пачки, т.е. представление зондирующего сигнала в виде последовательности пачек импульсов, а также не исключается возможность представления пачки в виде последовательности подпачек импульсов. В процессе приема эхо-сигнала осуществляют его оптимальную обработку путем преобразования колебаний, задержки импульсов и сжатия сигнала посредством суммирования импульсов.
Прототипом предлагаемого изобретения выбран способ исследования среды, основанный на радиолокационном обнаружении объектов путем определения их углового положения и удаленности в исследуемом пространстве. Для осуществления данного способа излучают в заданном направлении зондирующий сигнал, например последовательность импульсов, принимают отраженные импульсы и затем после обработки принятых импульсов измеряют параметры результирующего сигнала, в общем случае, уровень и временную задержку, по которым определяют наличие объектов и их местоположение. При этом размеры исследуемой области зависят от ширины диаграммы направленности антенны и дальности действия радиолокатора [3].
Недостаток названного способа заключается в том, что при зондировании среды затрудняется обнаружение объектов, находящихся в одном угловом стробе с более крупным объектом и смещенных относительно последнего по дальности. По причине высокой интенсивности мешающего сигнала, отраженного от более крупного объекта, нарушается стабильность работы приемника, в частности схемы сжатия импульсной последовательности.
Вероятность наличия в тракте обработки импульсов упомянутого выше мешающего сигнала зависит прежде всего от длительности временного интервала, в течение которого осуществляют прием и обработку эхо-сигналов, равного в общем случае времени прохождения зондирующего сигнала до границы области, определяемой дальностью действия локатора, и обратно. При наложении ограничений на область локации в виде ближней и дальней границ, расстояние между которыми задают равным толщине исследуемого слоя, указанный интервал сокращается. Используя известную зависимость дальности локации от времени и скорости распространения сигнала [4], минимальное значение интервала можно определить следующим образом
Tr≈Δ1/(c/2)+Tp, (1)
где Tr - длительность временного интервала приема сигнала; Δ1 - размер в глубину исследуемой области (толщина исследуемого слоя); с - скорость распространения зондирующего сигнала; Tp - длительность зондирующего сигнала. Названная величина зависит от составляющих Δ1/(c/2), менее которой она не может быть, и Tp. От длительности последней, как известно, зависит энергия зондирующего сигнала и, следовательно, дальность действия локатора. Поэтому возможность вариации величины Tp ограничена.
Задачей, на решение которой направлено изобретение, является разработка способа зондирования среды, обеспечивающего в процессе приема и обработки эхо-сигнала исключение отраженных импульсов, имеющих сравнительно более высокую интенсивность, и таким образом улучшающего помехоустойчивость локационной системы.
Указанная задача решается тем, что, используя способ исследования среды, основанный на излучении зондирующего сигнала, приеме и обработке отраженного сигнала, на определении по уровню сигнала, полученного в результате обработки, и длительности его задержки местоположения объекта или наличия неоднородностей в среде, предварительно задают толщину исследуемого слоя и расстояние до него, осуществляют послойное зондирование среды путем излучения зондирующего сигнала ограниченной длительности и осуществления обработки принимаемого отраженного сигнала на временном интервале, длительность которого определяют в соответствии с заданной толщиной исследуемого слоя, например вычисляют в соответствии с вышеприведенным выражением, и начальное смещение временного интервала определяют как
τ≈D/(c/2), (2)
где D - расстояние до ближней границы исследуемого слоя. Используют последовательности псевдослучайных чисел для формирования зондирующего сигнала в виде кодовой последовательности неэквидистантных импульсов. При формировании зондирующего сигнала в виде последовательности пачек импульсов результирующий сигнал определяют путем задержки и суммирования импульсов, полученных в процессе оптимальной обработки пачек на соответствующих им временных интервалах, осуществляют смену кода при генерации очередной пачки импульсов. При осуществлении излучения на несущей частоте упомянутые импульсы используют для модуляции высокочастотных колебаний. При необходимости исследования среды на всю глубину в процессе последовательно осуществляемых операций изменяют расстояние до исследуемого слоя, увеличивают или уменьшают параметр D в зависимости от его начального значения на величину, приблизительно равную толщине слоя.
Дальность до исследуемого слоя (расстояние до ближней границы слоя) определяют, прогнозируя удаленность объекта от локатора. Толщину исследуемого слоя задают с учетом прогноза возможного местоположения объекта в пределах границ названного слоя.
Техническим результатом изобретения является осуществление способа зондирования среды, обеспечивающего путем послойного исследования пространства уменьшение влияние помехи.
Сущность изобретения поясняется чертежом, где представлена блочная схема формирования зондирующего сигнала в виде последовательности неэквидистантных импульсов и обработки принятого сигнала путем сжатия.
Для формирования последовательности пачек импульсов может быть использована схема, содержащая согласно чертежу генератор 1 импульсов (ГИ), подключенный к устройству 2 управления и соединенный с многоотводной линией задержки (ЛЗ) 3, выходы (отводы) которой через ключи 4 блока 5, соединенные с устройством 2 управления, связаны с входами сумматора 6, выход которого подключен к входу усилителя 7 мощности, соединенного с антенной 8 передатчика.
Схема, обеспечивающая сжатие сигнала путем оптимальной обработки импульсов, в соответствии с чертежом содержит подключенный к антенне 9 приемника усилитель-преобразователь 10, выход которого связан с многоотводной ЛЗ 11, выходы (отводы) которой через ключи 12 блока 13, соединенные с устройством 2 управления, связаны с входами линейного сумматора 14, выход которого в свою очередь подключен к ЛЗ 15, выходы которой связаны с линейным сумматором 16, выход которого через ключ 17, соединенный с устройством 2 управления, связан с регистрирующим устройством 18, которое, кроме того, соединено с устройством 2 управления. Помимо этого, схема содержит соединенный с устройством 2 управления ключ 19, связывающий выход линейного сумматора 14 с регистрирующим устройством 18. В качестве упомянутых выше ЛЗ используют многоотводные линии. При этом ЛЗ 11 в общем случае содержит количество отводов, превышающее число импульсов в последовательности, ЛЗ 15 содержит количество отводов, равное числу пачек в последовательности.
Формирование последовательности пачек излучаемых импульсов осуществляют следующим образом.
На выходе ГИ 1 по команде устройства 2 управления формируется прямоугольный импульс, который подают на входы ЛЗ 3, где осуществляется задержка импульса на заданное время. Время смещения (задержки) импульса определяется кодом, который может быть представлен как набор псевдослучайных чисел, каждое из которых определяет позицию одного из импульсов пачки на временной оси [2]. Для кодирования последовательности пачек импульсов включают посредством устройства 2 управления соответствующие коду ключи 4 блока 5, соединяя тем самым соответствующие отводы ЛЗ 3 с входами сумматора 6. Смещенные импульсы с выходов ЛЗ 3 поступают на сумматор 6, где формируется последовательность пачек импульсов, образующих сигнал, который после усиления в усилителе 7 мощности подают на излучающую антенну 8. Если излучение зондирующего сигнала происходит на несущей частоте, тогда для его формирования предварительно осуществляют модуляцию несущих колебаний посредством упомянутых импульсов так же, как это делается, например, в [2].
Для приема кодированной последовательности пачек импульсов, используя устройство 2 управления, соединяют посредством ключей 12 блока 13 отводы ЛЗ 11 с входами сумматора 14 в соответствии с кодом принимаемой последовательности пачек импульсов. Очевидно, должна соблюдаться идентичность кода принимаемой последовательности и кода излучаемой последовательности пачки импульсов. Интервал времени, на которое соединяют отводы ЛЗ 11 с входами сумматора 14 при обработке каждой из пачек определяют в соответствии с вышеприведенным выражением (1), полагая Tp равным длительности пачки. Указанное соединение отводов ЛЗ 11 с входами сумматора 14 производят с задержкой относительно временной отметки, соответствующей началу излучения пачки (последовательности) импульсов с данным кодом. Длительность задержки согласно формуле (2) задают равной времени распространения зондирующего сигнала до ближней границы исследуемого слоя и обратно.
Обработка сигнала заключается в следующем.
При зондировании среды отраженный от объекта сигнал принимается антенной 9 и подается на усилитель-преобразователь 10, где производят усиление сигнала. При необходимости в процессе приема производят преобразование сигнала, например осуществляют гетеродинирование несущих колебаний или выпрямление, аналогично рассмотренному в [2]. После усиления сигнал в виде последовательности пачек импульсов подают на ЛЗ 11. Задержку каждого импульса пачки осуществляют в соответствии с его временным смещением на время, задаваемое в соответствии с кодом при формировании последовательности пачек, как это делают в [2]. После задержки импульсы подают на сумматор 14, где осуществляется накопление сигнала за счет суммирования импульсов. При рациональном выборе скважности и количества импульсов в пачке боковые составляющие суммарного сигнала имеют минимальное значение. При этом положение максимального значения сигнала (суммарного импульса) на временной оси, обусловленное отражением от объекта, не зависит от кода, который использовался при формировании данной пачки [2]. Сигнал на выходе сумматора 14 будет представлять последовательность импульсов, число которых равно количеству пачек в последовательности. Этот сигнал подают на вход ЛЗ 15, с каждого отвода которой снимается сигнал, задержанный на время, которое определяют как произведение периода следования пачек и числа (N-i), где N - количество пачек в последовательности; i - номер пачки. Задержанные сигналы подаются на входы сумматора 16, на выходе которого получают импульсный сигнал, изменяющийся (увеличивающийся) после обработки очередной пачки. На время обработки последней пачки включают посредством устройства 2 управления ключ 17, соединяющий выход сумматора 16 с регистрирующим устройством 18, с помощью которого измеряют уровень суммарного импульса и его задержку относительно начала интервала обработки. По полученным в результате измерения данным судят о наличии объекта и, учитывая расстояние до ближней границы слоя, т.е. параметр D, используемый в выражении (2), определяют дальность до объекта. Импульсы, отраженные от объектов, находящихся вне исследуемого слоя, не образуют на момент их обработки кодовой последовательности и будут восприниматься как шум.
Если зондирующий сигнал формируют в виде единой последовательности импульсов, т.е. таким образом, что он не содержит отдельных пачек, тогда включают посредством устройства 2 управления ключ 19, соединяющий выход сумматора 14 с регистрирующим устройством 18, с помощью которого осуществляют измерения аналогично вышеописанным. Ключ 17 при этом остается в разомкнутом положении.
В этом случае импульсы, отраженные от объекта, находящегося вне исследуемого слоя, также не будут представлять на заданном интервале обработки упорядоченной последовательности и будут восприниматься в виде шума.
Если существует необходимость исследования всей области по глубине, например, при отсутствии удовлетворительного прогноза относительного удаления объекта, тогда последовательно изменяют положение границ слоя, увеличивая или уменьшая их расстояние от локатора на величину, приблизительно равную толщине слоя. При этом очевидна возможность осуществления исследования посредством обработки предварительно записанного принятого сигнала, выполняемой последовательно при изменении границ слоя, или путем параллельной обработки сигнала за счет использования многоканальной схемы.
Как следует из анализа описанной выше реализации способа, осуществление обработки сигнала на заданном интервале Tr, определяемом согласно выражению (1) в соответствии с параметрами исследуемого слоя, позволяет уменьшить вероятность наличия в схеме обработки сигнала мешающих импульсов, отраженных от объектов, находящихся вне заданного слоя. Кроме того, использование сигнала, представленного в виде последовательности пачек импульсов, позволяет за счет сокращения длительности Tp обрабатываемой в данный момент импульсной последовательности - пачки импульсов уменьшить длительность временного интервала Тr. Что обеспечивает повышение помехоустойчивости локационной системы. Формирование зондирующего сигнала в виде непрерывно следующих пачек импульсов и осуществление обработки соответствующих им эхо-сигналов на определенных в соответствии с дальностью локации временных интервалах позволяет использовать предлагаемый способ в системах локации с длительным зондирующим сигналом, когда длительность сигнала многократно превышает значение D/(c/2).
Возможность решения поставленной задачи подтверждается опытной проверкой, осуществленной с помощью цифровых машин. Подтвердилась также высокая эффективность процесса сжатия сигнала независимо от способа оптимальной обработки импульсов.
Источники информации
1. Радиолокационные устройства / В.В.Васин, О.В.Власов, В.В.Григории-Рябов и др.; Под ред. В.В.Григорина-Рябова. - М.: Сов. радио, 1970. - c.5-39.
2. Патент RU 2154899, 7 Н 04 В 1/64, 20.08.2000.
3. Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио, 1975. - с.25-58 (прототип).
4. Мельник Ю.А., Стогов Г.В. Основы радиолокации и радиотехнические устройства. - М.: Сов. радио, 1973. - с.172-174.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ ФОРМИРОВАНИЯ И СЖАТИЯ ИМПУЛЬСНОГО РАДИОСИГНАЛА | 1999 |
|
RU2154899C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 2011 |
|
RU2473923C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2284656C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА | 2004 |
|
RU2302077C2 |
| СПОСОБ ФОРМИРОВАНИЯ И СЖАТИЯ СИГНАЛА | 2002 |
|
RU2237359C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА | 2005 |
|
RU2326401C2 |
| Способ формирования и обработки зондирующего лазерного сигнала | 2015 |
|
RU2616933C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ С ПОМОЩЬЮ ПИКОСЕКУНДНЫХ ИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195688C2 |
| СПОСОБ ИССЛЕДОВАНИЯ КОЛЕБАНИЙ | 2004 |
|
RU2298771C2 |
Изобретение относится к области исследования, осуществляемого путем зондирования пространства с помощью радио или акустических сигналов, и может быть использовано при определении неоднородностей исследуемой среды, а также наличия объектов. Технический результат заключается в повышении помехозащищенности систем. Способ основан на излучении зондирующего сигнала, приеме и обработке отраженного сигнала, на измерении уровня сигнала, определении по уровню сигнала, а также длительности его задержки, наличия и местоположения объекта или наличия неоднородностей в среде, причем, предварительно задавая толщину исследуемого слоя и расстояние до него, осуществляют послойное зондирование среды путем излучения зондирующего сигнала ограниченной длительности и осуществления обработки принимаемого отраженного сигнала на временном интервале, смещение которого относительно начального момента излучения зондирующего сигнала и длительность определяют в соответствии с выражениями:
τ≈D/(с/2);
Tr=Δ1/(c/2)+Tp,
где τ - смещение указанного временного интервала; D - расстояние до исследуемого слоя; с - скорость распространения зондирующего сигнала; Tr - длительность упомянутого временного интервала; Δ1 - толщина исследуемого слоя; Тр - длительность зондирующего сигнала. 4 з.п. ф-лы, 1 ил.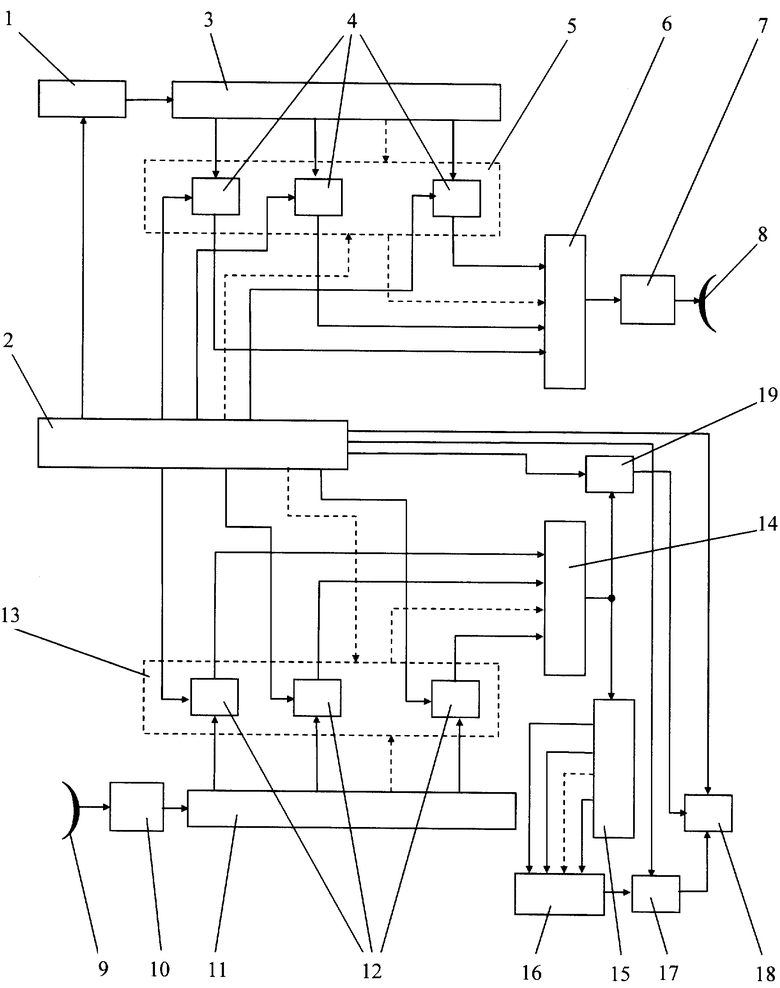
τ≈D/(c/2);
Tr≈Δ1/(c/2)+Tp,
где τ - смещение указанного временного интервала; D - расстояние до исследуемого слоя; с - скорость распространения зондирующего сигнала; Тr - длительность упомянутого временного интервала; Δ1 - толщина исследуемого слоя; Тр - длительность зондирующего сигнала.
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ЖИВОГО ОБЪЕКТА И МИКРОВОЛНОВЫЙ ЛОКАТОР ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2159942C1 |
| УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2138064C1 |
| US 6122537 А, 19.09.2000 | |||
| Счетное устройство для определения показаний процента выработки на ткацком станке | 1933 |
|
SU35692A1 |
| US 3806795, 23.04.1974 | |||
| БЕЛОЦЕРКОВСКИЙ Г.Б | |||
| Основы радиолокации и радиолокационные устройства | |||
| М.: Советсткое радио, 1975, с.25-58. | |||

