Изобретение относится к измерительной технике, в частности, к определению взлетной массы и центровки летательного аппарата с помощью источников излучения.
При погрузке летательных аппаратов часто происходит их перегруз, что является причиной многочисленных летных происшествий и катастроф. Перегруз приводит к смещению положения центра тяжести, т.е. к изменению центровки летательного аппарата, что приводит к нарушению взлетного режима и летных характеристик летательного аппарата. Вследствие этого очень важно осуществлять в процессе загрузки летательного аппарата контроль изменения его массы и распределения груза.
Известен способ взвешивания самолета посредством преобразователя давления, сообщающегося с гидравлическим цилиндром шасси, при котором преобразователь генерирует сигнал, соответствующий давлению в цилиндре, которое зависит только от массы самолета (патент США N 52528582, G 01 G 19/10, ИСМ вып. 82, N 9, 1995 г.).
Известен способ взвешивания объектов с использованием рентгеновских лучей, который предусматривает связь измеряемого объекта с источником излучения, регистрацию интенсивности излучения и определение по отдельным элементам излучения веса (патент США N 5585603, МКИ G 01 G 19/22, ИСМ, вып. 82, N 22, 1997 г.).
Недостатком известных способов является их сложность и необходимость дорогого оборудования, невозможность определения статического положения объекта.
Наиболее близким к предложенному является способ измерения массы вертолета, при котором с помощью закрепленных на фюзеляже устройств формируют сигнал, характеризующий расстояние между фюзеляжем и лопастями, и по нему определяют массу вертолета (заявка ЕПВ N 0502811, G 01 G 19/07, ИСМ, вып. 82, N 24, 1993 г.).
Данный способ имеет небольшую точность определения массы. Кроме того, он не позволяет определять статическое положение объекта.
Изобретение направлено на повышение точности определения массы летательного аппарата, расширение функциональных возможностей благодаря определению массы и центровки.
Поставленная задача достигается способом определения взлетной массы и центровки летательного аппарата, при котором с помощью закрепленных на фюзеляже устройств формируют сигнал, характеризующий расстояние между фюзеляжем и сканирующим устройством. В отличие от прототипа в качестве устройства формирования сигнала используют лазерный излучатель, посредством которого проецируют световой конус на рабочую поверхность сканирующего устройства, на которой фиксируют координаты проекции светового конуса и по их изменению с помощью вычислительного устройства определяют массу и центр масс летательного аппарата.
При увеличении массы летательного аппарата по мере его загрузки изменяется расстояние между лазерным излучателем и сканирующей поверхностью, что приводит к изменению координат проекции светового конуса.
При изменении положения летательного аппарата происходит смещение центра тяжести и, соответственно, смещение проекции светового конуса с одновременной деформацией круга в эллипс.
Координаты проекции обрабатываются в вычислительном устройстве, и информация о характеристиках летательного аппарата воспроизводится на экране монитора.
На чертеже представлена блок-схема устройства для измерения взлетной массы и центровки летательного аппарата, на которой изображено: лазерный излучатель 1, сканирующее устройство 2, вычислительное устройство 3, монитор 4, бортовой блок питания 5.
Устройство работает следующим образом.
Лазерный излучатель 1 закрепляют на фюзеляже летательного аппарата в специальном гнезде, например, сориентированном относительно центра тяжести, обеспечивающем его привязку к координатным осям. В оптической системе излучателя предусмотрены координатные метки, которые проецируются на поверхность сканирующего устройства и служат для привязки его по координатным осям летательного аппарата.
Лазерный излучатель подключают к бортовому блоку питания 5 летательного аппарата. Сканирующее устройство 2 устанавливают под лазерным излучателем 1 так, чтобы проекция светового конуса располагалась примерно в центре его рабочей поверхности. Исходные данные (до загрузки летательного аппарата) координат светового пятна обрабатывают и фиксируют в вычислительном устройстве 3. Информация о массе и положении центра тяжести летательного аппарата поступает на монитор 4 и отображается на его экране.
По мере загрузки летательного аппарата изменяются его характеристики, соответственно изменяется геометрия светового пятна на поверхности сканирующего устройства. Это изменение обрабатывается в вычислительном устройстве 3 с помощью специальной программы для ЭВМ. Информация об изменении массы и центровки летательного аппарата отображается на мониторе 4.
Таким образом, предложенный способ позволяет простыми средствами измерять взлетную массу и центровку летательного аппарата с достаточно высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2016 |
|
RU2692948C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ОБЪЕМА И УРОВНЯ ЖИДКОСТИ | 2000 |
|
RU2187079C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА ПЕРЕД ВЗЛЕТОМ | 2011 |
|
RU2463567C1 |
| КРЫШКА ДЛЯ ЗАКРЫВАНИЯ СОСУДОВ С ГОРЛЫШКОМ | 2000 |
|
RU2164888C1 |
| СПОСОБ ЭКСПРЕСС-ОПРЕДЕЛЕНИЯ СОСТАВА ДВУХКОМПОНЕНТНОЙ СРЕДЫ | 2001 |
|
RU2188410C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| Система двустороннего беспроводного оптического канала связи с беспилотным летательным аппаратом | 2024 |
|
RU2841515C1 |
| СПОСОБ РАБОТЫ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2024 |
|
RU2833362C1 |
Изобретение относится к области измерительной техники, а именно к способам определения взлетной массы и центровки летательного аппарата с помощью источников излучения. Сущность данного способа заключается в формировании устройствами, закрепленными на фюзеляже, сигнала, отражающего характеристики летательного аппарата, такие как масса и положение центра тяжести. Для этого лазерным излучателем проецируют световой конус на рабочую поверхность сканирующего устройства. Координаты проекции светового конуса фиксируют и по их изменению с помощью вычислительного устройства определяют массу и центр тяжести летательного аппарата, после чего информация отображается на экране монитора. Технический результат - повышение точности определения массы летательного аппарата, расширение функциональных возможностей. 1 ил.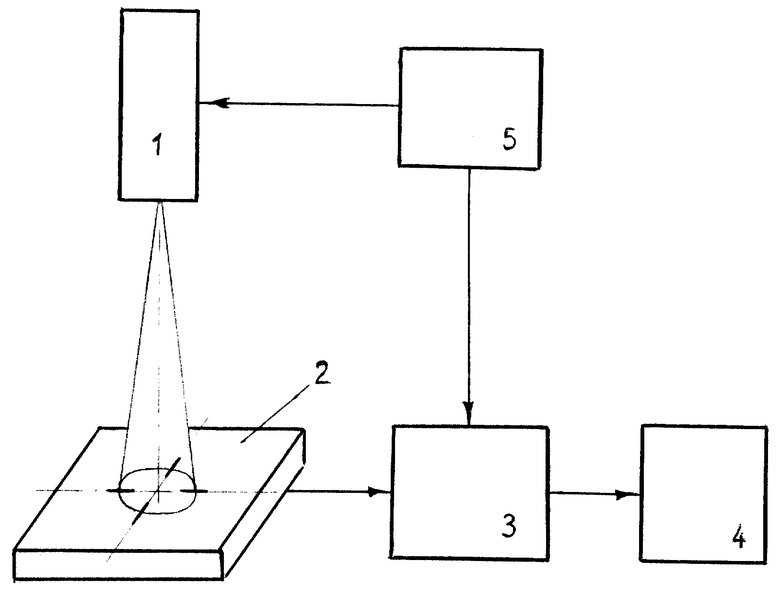
Способ определения взлетной массы и центровки летательного аппарата, при котором с помощью закрепленных на фюзеляже устройств формируют сигнал, характеризующий расстояние между фюзеляжем и сканирующим устройством, отличающийся тем, что в качестве устройства формирования сигнала используют лазерный излучатель, посредством которого проецируют световой конус на рабочую поверхность сканирующего устройства, на которой фиксируют координаты проекции светового конуса и по их изменению с помощью вычислительного устройства определяют массу и центр масс летательного аппарата.
| Способ получения цитронеллаля или его гомологов | 1973 |
|
SU474969A3 |
| US 5331577 A, 19.07.1994. | |||
