Область техники
Изобретение относится к области измерительной авиационной техники, а именно к системам определения положения центра тяжести и нарушения взлетной центровки самолета.
При эксплуатации самолета нередко допускается неправильное размещение груза внутри самолета, что вызывает изменение положения его центра тяжести, следствием чего являются летные происшествия и катастрофы. Поэтому крайне необходим контроль центровки самолета перед взлетом.
Уровень техники
Известен способ определения взлетной массы и центровки летательного аппарата (см. патент РФ на изобретение №2172475 С1 от 20.08.2001) с помощью источников излучения. Сущность данного способа заключается в формировании устройствами, закрепленными на фюзеляже, сигнала, отражающего характеристики летательного аппарата (ЛА), такие как масса и положение центра тяжести. Для этого лазерным излучателем проецируют световой конус на рабочую поверхность сканируемого устройства. При увеличении массы ЛА по мере его загрузки изменяется расстояние между лазерным излучателем и сканируемой поверхностью, что приводит к изменению координат проекции светового конуса. При изменении положения ЛА происходит смещение центра тяжести и, соответственно, смещение проекции светового конуса с одновременной деформацией круга в эллипс. Координаты проекции светового конуса фиксируют и по их изменению с помощью вычислительного устройства определяют массу и центр тяжести ЛА, после чего информация отображается на экране монитора.
Однако данный способ имеет конструктивные недостатки. Лазерный излучатель закрепляют на фюзеляже ЛА в специальном гнезде, ориентированном относительно центра тяжести, обеспечивающим его привязку к координатным осям. В оптической системе используют координатные метки, которые проецируются на поверхность сканируемого устройства для привязки его по координатным осям ЛА, затрудняющие эксплуатацию в различных сложных метеоусловиях.
Данный способ вызывает технические и эксплуатационные трудности при эксплуатации в аэропортах для различного типа ЛА и оснащения их лазерными источниками - увеличение финансовых затрат на их установку и эксплуатацию техническим персоналом.
Известен и взят за прототип способ определения веса и координат центра тяжести самолета и веса тел, имеющих продольную ось симметрии, патент РФ на изобретение №2397456 С1 от 15.06.2009 г. Согласно способу, самолет как объект измерения устанавливают на измерительную и поддерживающую опоры, измеряют давление самолета на измерительную опору, затем меняют положение опор. Изменение положения опор осуществляют путем перемещения самолета по установленной наклонно к горизонтали поддерживающей платформе и горизонтально установленной измерительной платформе, оснащенной блоком весоизмерительных датчиков, при действии давления на датчики передним колесом шасси, являющимся при этом измерительной опорой, а задние шасси - поддерживающей опорой. Затем производят замер давления самолета на измерительную опору заданное количество раз, после чего по результатам замеров определяют вес и координаты центра тяжести самолета, учитывая при каждом замере угол положения продольной оси самолета относительно горизонтали и расстояние смещения измерительной опоры относительно соприкосновения друг с другом платформ горизонтальной измерительной и наклонной поддерживающей.
Однако данный способ вызывает трудности в реализации при эксплуатации в аэропортах. Так изменение угла наклона поддерживающей платформы требует строительства механических сооружений с применением гидравлики. Перемещение ЛА даже по измерительной платформе требует точно измерять дистанцию перемещения измерительной опоры относительно точки соприкосновения измерительной и наклонной поддерживающей платформы, что также трудно реализуемо в условиях работы аэропортов.
Расчет нагрузки параметров от измерительной стойки, угла наклона поддерживающей платформы и расстояние от точки соприкосновения не дает возможности оперативно контролировать координаты центра тяжести самолета летчиками в кабине ЛА и операторами управления воздушным движением (УВД).
Раскрытие изобретения
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в оперативном и эффективном определении положения центра тяжести самолета перед взлетом летчиками в кабине самолета и операторами УВД, что позволит предупредить неправильное размещение груза внутри самолета и повысить безопасность полетов.
Существенные признаки
Для получения указанного технического результата в предлагаемой системе определения положения центра тяжести самолета (СОЦТ), включающей измерительную весовую платформу (ИП), установленную в квадратном углублении фундамента на рулежной дорожке (РД) взлетно-посадочной полосы (ВПП), на которую поступает движущийся самолет, дополнительно на днище фюзеляжа самолета размещена маркировка средней аэродинамической хорды (САХ). ИП выполнена с креплением ее в середине на опорах-шарнирах. Длина каждого плеча ИП рассчитана для одновременного размещения на ней передней и основных стоек шасси самолета. В систему введены телевизионная передающая камера, фотокамера, оптические оси которых направлены для совмещения их на шкале САХ, пересекаясь в точке над осью вращения ИП, и установлены на фундаменте платформы для фиксирования отметки САХ и отметки времени прохождения сигналов координат центра тяжести. Введены блок измерения угла поворота φ и угловой скорости  ИП с датчиками, установленными на неподвижной оси вращения платформы, включены блок фиксирования положения центра тяжести самолета в процентах от величины САХ, блок управления, радиолиния передачи информации, входной и выходной контакторы на ИП, на которой установлены система подсвета и контакторы - концевые выключатели, причем телевизионная камера и фотокамера связаны с первым и вторым входами блока фиксирования положения центра тяжести самолета в процентах от величины САХ, третий вход его связан с выходом блока измерения угла поворота и угловой скорости поворота ИП, а выход его соединен с первым входом блока управления, первый и второй выходы которого соединены с цепями включения телевизионной камеры и фотокамеры, второй и третий входы соединены с передним и задним контакторами, установленными на фундаменте на РД, а третий выход связан с радиолинией передачи информации о запрете взлета экипажу и операторам УВД о нарушении центровки самолета.
ИП с датчиками, установленными на неподвижной оси вращения платформы, включены блок фиксирования положения центра тяжести самолета в процентах от величины САХ, блок управления, радиолиния передачи информации, входной и выходной контакторы на ИП, на которой установлены система подсвета и контакторы - концевые выключатели, причем телевизионная камера и фотокамера связаны с первым и вторым входами блока фиксирования положения центра тяжести самолета в процентах от величины САХ, третий вход его связан с выходом блока измерения угла поворота и угловой скорости поворота ИП, а выход его соединен с первым входом блока управления, первый и второй выходы которого соединены с цепями включения телевизионной камеры и фотокамеры, второй и третий входы соединены с передним и задним контакторами, установленными на фундаменте на РД, а третий выход связан с радиолинией передачи информации о запрете взлета экипажу и операторам УВД о нарушении центровки самолета.
Кроме того, перед системой установлены предупреждающие знаки по ограничению скорости движения ЛА.
Перечень фигур
Для пояснения сущности изобретения СОЦТ на фиг.1 изображены:
1 - самолет;
2 - шкала средней аэродинамической хорды (САХ);
3 - основные стойки шасси ЛА;
4 - передняя стойка шасси ЛА;
5 - антенные связи по радиолинии в кабине летчиков;
6 - измерительная весовая платформа (ИП);
7 - опоры-шарниры с подшипниками, ось поворота ИП;
8 - датчики угла φ и угловой скорости  поворота платформы ИП;
поворота платформы ИП;
9 - освещение шкалы САХ;
10, 12 - концевые выключатели (контакторы) платформы;
11, 13 - электрические контакторы на фундаменте;
14 - телевизионная камера;
15 - блок измерения угла и угловой скорости поворота платформы ИП;
16 - цифровая фотокамера;
17 - блок фиксирования положения центра тяжести самолета в процентах от величины САХ;
18 - блок управления;
19 - радиолиния передачи информации;
20 - радиолиния управления воздушным движением (УВД);
21 - предупредительный знак ограничения скорости ЛА;
22 - углубленный фундамент системы с опорами-шарнирами 7.
Система определения положения центра тяжести (СОЦТ) перед взлетом ЛА-1 включает установку углубленного квадратного фундамента 22 на рулежной дорожке (РД) старта ВПП. Сверху фундамента 22 расположена четырехугольная измерительная платформа (ИП) 6 с креплением ее в середине в двух противоположно направленных опорах-шарнирах 7, дающих возможность ИП 6 изменять угловое положение.
Угол φ и угловая скорость  измеряется датчиками 8, установленными на шарнирах 7 и связанный с блоком измерения угла и угловой скорости поворота платформы ИП 15. На днище фюзеляжа ЛА 1 наносится маркировка - линейка 2 (цветовое кодирование, штрих-код) средней аэродинамической хорды (САХ). На ИП 6 установлена система подсвета и освещения 9, а также контакторы в передней 10 и задней части 12 ИП 6 для включения-выключения телевизионной камеры 14 и фотокамеры 16, установленных сбоку на фундаменте 22 рядом с ИП 6, блок управления 18 работой камер 14 и 16 в режиме отметки, фиксирования сигналов и времени, который соединен с блоком фиксирования координат САХ 17, который в свою очередь связан с блоком 15 измерения углов поворота ИП 6, а также передним 11 и задним 13 контактором. Кроме того, блок управления 18 соединен с радиолинией передачи информации 19, сигналы которой принимаются в кабине 5 ЛА 1 и операторами 10 УВД.
измеряется датчиками 8, установленными на шарнирах 7 и связанный с блоком измерения угла и угловой скорости поворота платформы ИП 15. На днище фюзеляжа ЛА 1 наносится маркировка - линейка 2 (цветовое кодирование, штрих-код) средней аэродинамической хорды (САХ). На ИП 6 установлена система подсвета и освещения 9, а также контакторы в передней 10 и задней части 12 ИП 6 для включения-выключения телевизионной камеры 14 и фотокамеры 16, установленных сбоку на фундаменте 22 рядом с ИП 6, блок управления 18 работой камер 14 и 16 в режиме отметки, фиксирования сигналов и времени, который соединен с блоком фиксирования координат САХ 17, который в свою очередь связан с блоком 15 измерения углов поворота ИП 6, а также передним 11 и задним 13 контактором. Кроме того, блок управления 18 соединен с радиолинией передачи информации 19, сигналы которой принимаются в кабине 5 ЛА 1 и операторами 10 УВД.
Перед системой СОЦТ устанавливается освещенный предупредительный знак 21 ограничения скорости ЛА 1.
Система работает следующим образом.
При движении по РД в момент времени t1 ЛА1 попадает сначала носовой стойкой шасси 4 (см. фиг.1), затем основными стойками 3 на первое плечо ИП 6 и далее, переходя опору-шарнир 7 на второе плечо, моменты от сил, действующих на опоры основных шасси Pш·L1, опору носовой шасси Рн·L3, выравниваются, когда координата центра тяжести при движении самолета совместится с осью вращения ИП, затем происходит изменение положения центра тяжести самолета, давления на опоры шасси от веса Р самолета и под действием момента силы P·L2 происходит поворот ИП-6 относительно опоры-шарнира на угол φ. Блок 18 управляет работой камер 14 и 16 в режиме отметки САХ, которые фиксируют и запоминают показания САХ над осью вращения ИП от момента времени t1, когда включается контактор 10, до момента времени t2, когда срабатывает контактор 12, и камеры выключаются. Угол и угловая скорость поворота измеряются датчиком 8, связанным с блоком измерения угла и угловой скорости поворота платформы ИП 15. Момент сил P·L2 заставляет срабатывать контактор 12 в момент времени t2 с учетом инерционности и запаздывания вращения ИП в режиме измерения положения центра тяжести самолета. Определяют время поворота ИП на угол φ, равное Δt. При этом датчики угла поворота φ и угловой скорости посылают сигнал переброса моментов от сил ЛА 1. В блоке управления 18 реализуются алгоритмы: определения времени поворота Δt ИП на угол φ, поиска «штрихкода, показаний САХ над осью вращения ИП», снятого в момент t2 фотокамерой, поиска «штрихкода, показаний САХ над осью вращения ИП», снятого в момент (t2-Δt) в начале поворота ИП, путем сравнения двух графических снимков определяют L2 и координату центра тяжести на САХ, равную
L1+L2=N CAX. При этом в блоке управления 18 реализуются алгоритмы: 1)φ и  2) P·L2≤δ2; 3) N САХ%≤δ3.
2) P·L2≤δ2; 3) N САХ%≤δ3.
Если координата центра тяжести САХ≥δ3, то передается информация о запрете взлета,
где δ1, δ2, δ3 - разрешенные значения;
L - расстояние от носовой опоры до плоскости, проходящей через основные опоры;
L1 - расстояние от плоскости, пересекающей основные опоры, до оси вращения ИП в момент времени t2;
L2 - расстояние от оси вращения ИП до центра тяжести в момент времени (t2-Δt);
L3 - расстояние от носовой опоры до центра тяжести в момент времени (t2-Δt).
Информация из блока управления 18, полученная о координатах центра тяжести ЛА 1, и отметки времени прохождения сигналов координат, передается по радиолинии передачи 19 в кабину летчиков 5 и операторам 20 УВД. Эта информация предупреждения о том, что в случае выхода координат центра тяжести ЛА 1 за пределы (N САХ%>δ3) взлет не может быть разрешен.
Важным достоинством данной системы является повышение безопасности полетов летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2006 |
|
RU2319115C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС ВЗЛЕТА-ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2356801C1 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
Изобретение относится к области измерительной техники, а именно к системам определения положения центра тяжести и нарушения взлетной центровки самолета. Устройство включает измерительную весовую платформу (ИП), установленную в квадратном углублении фундамента на рулежной дорожке (РД) взлетно-посадочной полосы (ВПП), на которую поступает движущийся самолет, с размещенной на днище фюзеляжа маркировкой средней аэродинамической хорды (САХ). Измерительная весовая платформа (ИП) выполнена с креплением ее в середине на опорах-шарнирах, длина каждой половины ИП рассчитана для одновременного размещения на ней передней и основных стоек шасси самолета. Кроме того, устройство содержит телевизионную передающую камеру, фотокамеру, оптические оси которых направлены для совмещения их на шкале САХ, пересекаясь в точке над осью вращения ИП, и установлены на фундаменте платформы, блок измерения угла, датчики утла поворота φ и угловой скорости ИП, которые установлены на оси вращения платформы. В систему включены блок фиксирования положения центра тяжести самолета в процентах от величины САХ, блок управления, радиолиния передачи информации, входной и выходной контакторы на ИП, на которой установлены система подсвета и контакторы - концевые выключатели. Технический результат заключается в повышении оперативности и эффективности определения положения центра тяжести самолета перед взлетом. 1 з.п. ф-лы, 1 ил.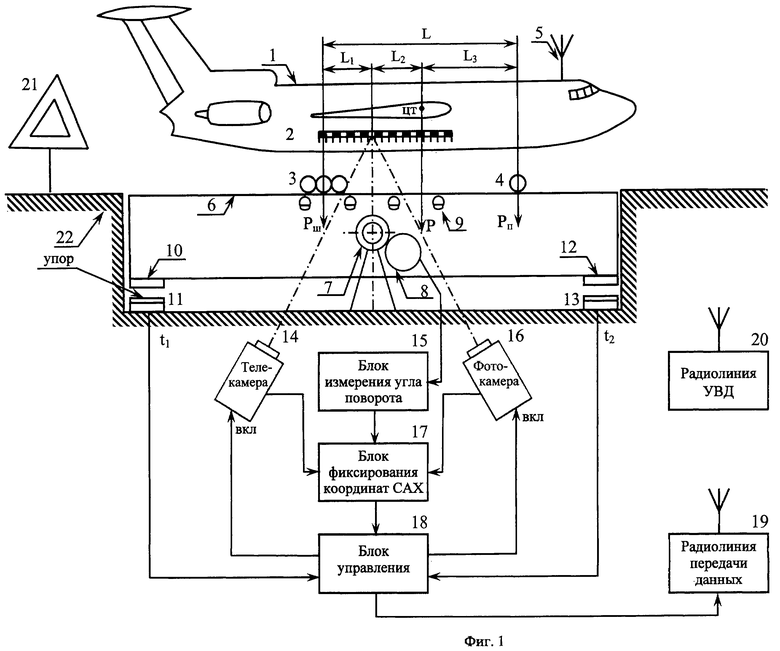
1. Система определения положения центра тяжести самолета перед взлетом, включающая измерительную весовую платформу (ИП), установленную в квадратном углублении фундамента на рулежной дорожке (РД) взлетно-посадочной полосы (ВПП), на которую поступает движущийся самолет, отличающаяся тем, что самолет выполнен с размещенной на днище фюзеляжа маркировкой средней аэродинамической хорды (САХ), измерительная весовая платформа (ИП) выполнена с креплением ее в середине на опорах-шарнирах, длина каждой половины ИП рассчитана для одновременного размещения на ней передней и основных стоек шасси, самолета, в систему введены телевизионная передающая камера, фотокамера, оптические оси которых направлены для совмещения их на шкале САХ, пересекаясь в точке над осью вращения ИП, и установлены на фундаменте платформы, введены блок измерения угла с датчиками угла поворота φ и угловой скорости ИП, установленными на оси вращения платформы, блок фиксирования положения центра тяжести самолета в процентах от величины САХ, блок управления, радиолиния передачи информации, входной и выходной контакторы на ИП, на которой установлены система подсвета и контакторы - концевые выключатели, причем телевизионная камера и фотокамера связаны с первым и вторым входами блока фиксирования взлетной центровки тяжести самолета в процентах от величины САХ, третий вход его связан с выходом блока измерения угла поворота и угловой скорости поворота ИП, а выход его соединен с первым входом блока управления, первый и второй выходы которого соединены с цепями включения телевизионной камеры и фотокамеры, второй и третий входы соединены с передним и задним контакторами, установленными в углублении на фундаменте на РД, а третий выход связан с радиолинией передачи информации о запрете взлета экипажу и операторам управления воздушным движением (УВД) о нарушении центровки самолета.
2. Система по п.1, отличающаяся тем, что перед системой установлены предупреждающие знаки по ограничению скорости движения ЛА.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА | 2009 |
|
RU2397456C1 |
| СПОСОБ КОМПЬЮТЕРНОГО МОДЕЛИРОВАНИЯ ЦЕНТРОВКИ ГРУЗОВОГО САМОЛЕТА ТИПА АН-124-100 | 2006 |
|
RU2331109C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗЛЕТНОЙ МАССЫ И ЦЕНТРОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2172475C1 |

