Изобретение относится к измерительной технике и может быть использовано для измерения параметров прямолинейного движения, в частности скорости объектов, а также определения закона изменения скорости объектов по траектории движения, с использованием распределенного регистрирующего контура в виде разнесенных вдоль траектории движения объекта датчиков положения, например индукционных датчиков с интегратором на выходе при контроле движения проводников с током.
Известен способ измерения скорости движения (авт. свид. СССР N 1744652, МПК G 01 P 31/64, БИ N 24, 1992 г.), заключающийся в измерении интервала времени tj прохождения объектом заданного базового расстояния ΔSj и определении средней скорости на соответствующем j-ом интервале траектории по отношению  , причем используют информацию о выходных сигналах пар идентичных датчиков положения с колоколообразной формой передаточной характеристики, расположенных вдоль траектории движения объекта, а перед измерением задают на траектории координаты Xi регистрации объекта, в которых необходимо определять значения его скорости, таким образом, что ΔSj= (Xi-Xi-1),i = 1,2,...,N; j = 1,2,...,N-1.
, причем используют информацию о выходных сигналах пар идентичных датчиков положения с колоколообразной формой передаточной характеристики, расположенных вдоль траектории движения объекта, а перед измерением задают на траектории координаты Xi регистрации объекта, в которых необходимо определять значения его скорости, таким образом, что ΔSj= (Xi-Xi-1),i = 1,2,...,N; j = 1,2,...,N-1.
В процессе измерения скорости измеряют текущие значения выходных сигналов датчиков соответствующей пары и непрерывно вычисляют координатную функцию R(X) как отношение дифференциального U∂ и суммарного UΣ сигналов датчиков, причем в моменты прохождения объектом заданных координат Xi определяют результирующий сигнал Ei, прибавляя к текущему значению сформированной координатной функции Ri, измеренному в координате Xi, рассчитанное заранее по формуле  соответствующее значение напряжения сдвига Δi, что обеспечивает сдвиг в каждой из заданных координат Xi параллельно самой себе характеристики R(X) изменения сформированной координатной функции так, чтобы в каждой из заданных координат Xi значение результирующего сигнала Ei= Ri+Δi оказалось равным нулю, при этом моменты прохождения объектом заданных координат Xi определяют по равенству нулю результирующего сигнала.
соответствующее значение напряжения сдвига Δi, что обеспечивает сдвиг в каждой из заданных координат Xi параллельно самой себе характеристики R(X) изменения сформированной координатной функции так, чтобы в каждой из заданных координат Xi значение результирующего сигнала Ei= Ri+Δi оказалось равным нулю, при этом моменты прохождения объектом заданных координат Xi определяют по равенству нулю результирующего сигнала.
Описанный способ является сложным в реализации и не обеспечивает измерение мгновенной скорости в каждый момент времени, позволяя измерять только среднюю на интервале пути скорость.
Наиболее близким к заявляемому является способ измерения скорости движения (авт. свид. СССР N 1818588, МПК G 01 P 3/64, БИ N 20, 1993 г.), заключающийся в непрерывном измерении сигналов U1, U2 двух идентичных датчиков положения с колоколообразной передаточной характеристикой, установленных вдоль траектории движения, определении координатной функции F по формуле  , причем предварительно, до начала измерения принимают значение масштабирующего коэффициента Se, численно равным перемещению объекта, соответствующего изменению выходного сигнала датчика положения в e раз, а скорость v в процессе измерений определяют по формуле:
, причем предварительно, до начала измерения принимают значение масштабирующего коэффициента Se, численно равным перемещению объекта, соответствующего изменению выходного сигнала датчика положения в e раз, а скорость v в процессе измерений определяют по формуле:
Этот способ имеет следующие недостатки:
- низкая точность из-за существенной нелинейности координатной функции и возникновения большой погрешности при вычислении скорости;
- сложный вид зависимостей координатной функции от выходных сигналов датчиков F(U1, U2) и скорости от координатной функции v(F), что приводит к трудностям в технической реализации.
Известно устройство, реализующее способ измерения скорости движения объекта (авт. свид. СССР N 1744652, МПК G 01 P 3/64, БИ N 24, 1992 г.), содержащее два датчика положения объекта, блок определения разности двух сигналов (субтрактор), блок деления, двухвходовый сумматор, двухвходовый логический элемент ИЛИ, нуль-орган, измеритель временных интервалов, блок дифференцирования, управляемый источник опорного напряжения (УИОН), запоминающее устройство, вычислитель и двухвходовый сумматор. Выходы датчиков подключены к субтрактору, с выходом которого соединен вход "Делимое" блока деления, а вход "Делитель" последнего соединен с выходом сумматора, к входам которого подключены выходы датчиков. Выход блока деления подключен к первому входу сумматора, выход которого через первый вход элемента ИЛИ соединен с входом нуль-органа, а второй вход сумматора подключен к выходу УИОН. Выход нуль-органа подключен к входу измерителя временных интервалов и входу "Строб 1" запоминающего устройства. Второй вход элемента ИЛИ соединен с выходом блока дифференцирования, вход которого подключен к выходу первого датчика. Вход УИОН соединен с первым выходом запоминающего устройства. Вход "Строб 2" запоминающего устройства подключен к выходу измерителя временных интервалов. Кроме того, второй вход запоминающего устройства подключен к первому информационному входу вычислителя, выход которого является выходом устройства для измерения скорости. К второму информационному входу вычислителя подключен выход измерителя временных интервалов.
Описанное устройство не обеспечивает измерение мгновенной скорости в каждый момент времени, позволяя измерять только среднюю на интервале пути скорость.
Наиболее близким к заявляемому является устройство, реализующее способ измерения скорости (авт. свид. СССР N 1818588, МПК G 01 P 3/64, БИ N 20, 1993 г. ), содержащее два идентичных датчика положения с колоколообразной передаточной характеристикой, два управляемых ключа, сумматор, вычитающее устройство, пороговый элемент, делительное устройство, устройство дифференцирования, блок нелинейности с передаточной функцией  и устройство умножения, причем каждый датчик подключен через соответствующий управляемый ключ к входам сумматора и вычитающего устройства. Управляющие входы управляемых ключей подключены к выходу порогового элемента, вход которого подключен к выходу первого по ходу движения датчика. Выходы сумматора и вычитающего устройства подключены, соответственно, к первому и второму входам устройства деления, выход которого соединен с входами устройства дифференцирования и первого блока нелинейности. Выходы устройства дифференцирования и первого блока нелинейности подключены соответственно к первому и второму входам устройства умножения, выход которого является выходом всего устройства для измерения скорости, а третий вход устройства умножения подключен к входу устройства для измерения скорости, предназначенному для подачи сигнала, пропорционального величине масштабирующего коэффициента Se.
и устройство умножения, причем каждый датчик подключен через соответствующий управляемый ключ к входам сумматора и вычитающего устройства. Управляющие входы управляемых ключей подключены к выходу порогового элемента, вход которого подключен к выходу первого по ходу движения датчика. Выходы сумматора и вычитающего устройства подключены, соответственно, к первому и второму входам устройства деления, выход которого соединен с входами устройства дифференцирования и первого блока нелинейности. Выходы устройства дифференцирования и первого блока нелинейности подключены соответственно к первому и второму входам устройства умножения, выход которого является выходом всего устройства для измерения скорости, а третий вход устройства умножения подключен к входу устройства для измерения скорости, предназначенному для подачи сигнала, пропорционального величине масштабирующего коэффициента Se.
Основными недостатками данного устройства являются низкая точность измерения скорости, вызванная существенной нелинейностью координатной функции и трудности в технической реализации блока нелинейности со сложной передаточной функцией.
Целью предлагаемых изобретений является упрощение процедуры измерения скорости и устройства, реализующего способ измерения и повышение точности измерения скорости.
Намеченная цель достигается тем, что в способе измерения скорости объекта, заключающемся в непрерывном измерении сигналов U1, U2 двух идентичных датчиков положения с колоколообразной передаточной характеристикой, установленных вдоль траектории движения, определении координатной функции F с предварительным, до начала измерения заданием значения масштабирующего коэффициента Se, соответствующего изменению амплитуды выходного сигнала датчика положения в e раз, координатную функцию определяют по формуле  , а скорость v определяют как
, а скорость v определяют как  .
.
Заявляемое техническое решение отличается от прототипа тем, что координатную функцию определяют по формуле  , а скорость v определяют как
, а скорость v определяют как 
Сравнение заявляемого технического решения с прототипом позволяет установить соответствие его критерию "новизна".
Предлагаемый способ измерения скорости и устройство для его реализации представленны фиг. 1 и фиг. 2.
На фиг. 1 показаны графики выходных сигналов датчиков Д1 и Д2 в зависимости от координаты объекта U1(X) и U2(X) и график координатной функции 
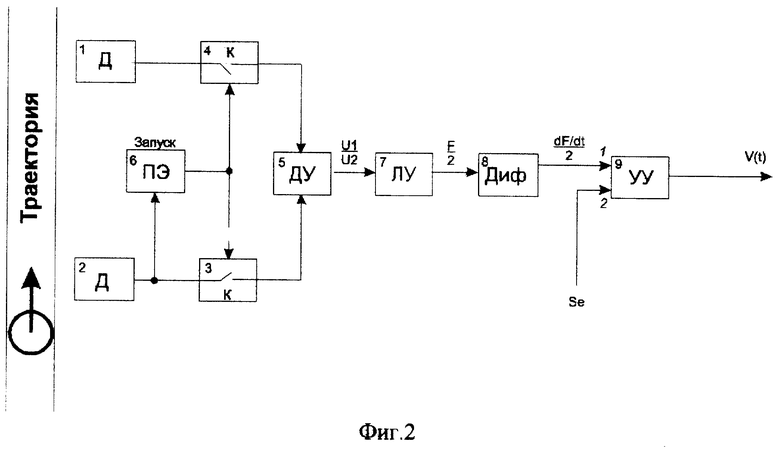
На фиг. 2 приведена структурная схема устройства для реализации предлагаемого способа измерения скорости на участке траектории, ограниченном двумя датчиками положения.
Пересекающиеся ветви передаточных характеристик датчиков положения объекта, реагирующих на поле, создаваемое им, могут быть с некоторой степенью точности описаны экспоненциальными функциями. На такой аппроксимации выходных сигналов датчиков положения основаны способ-прототип и заявляемый способ. Таким образом, выходные сигналы пары датчиков (см. фиг. 1), установленных вдоль траектории движения объекта при его нахождении между датчиками, могут быть описаны выражениями: U1 = U0•eX и U2 = U0•e-X, где U0 - постоянный коэффициент, зависящий от конфигурации датчиков, конструктивных параметров объекта, величины протекающего в нем тока (если объектом является проводник с током) и т.п.;  - относительная координата положения объекта; S (t) - текущее значение расстояния объекта от начала координат (фиг. 1); Se - интервал траектории, на границах которого сигнал датчика изменяется в e раз.
- относительная координата положения объекта; S (t) - текущее значение расстояния объекта от начала координат (фиг. 1); Se - интервал траектории, на границах которого сигнал датчика изменяется в e раз.
В соответствии с предлагаемым способом координатная функция F будет равна:
Разрешая уравнение (1) относительно координаты X ≥ 0 получаем:
Скорость движения объекта может быть определена как производная расстояния по времени:
или, принимая во внимание, что  , получаем:
, получаем:
Продифференцировав относительную координату X из выражения (2) и подставив результат в (4), окончательно получим:
Точность предлагаемого способа, как и способа-прототипа, определяется методической погрешностью аппроксимации выходных сигналов, а также погрешностями вычисления значений F и v. Учитывая существенное упрощение математических выражений зависимостей F(U1, U2) и v(F) по сравнению со способом-прототипом, а также абсолютно линейный вид последней (как видно на графике фиг. 1) в отличие от существенно нелинейной аналогичной зависимости, используемой в способе-прототипе, точность измерения скорости в соответствии с предлагаемым способом будет выше, чем при использовании способа-прототипа.
Устройство, реализующее заявляемый способ измерения скорости (см. фиг. 2), содержит датчики положения (Д) 1 и 2, подключенные через управляемые ключи (К) 3 и 4 к входам делительного устройства (ДУ) 5. Управляющие входы ключей 3 и 4 подключены к выходу порогового элемента (ПЭ) 6, вход которого подключен к выходу датчика 1, который является первым по ходу движения объекта. Выход ДУ 5 подключен к входу логарифмирующего устройства (ЛУ) 7, выход которого соединен с входом устройства дифференцирования (Диф) 8. Выход Диф 8 подключен к первому входу устройства умножения (УУ) 9, на которой вход которого подается сигнал, пропорциональный масштабному коэффициенту Se. Выход УУ 9 является выходом всего устройства для измерения скорости.
Устройство работает следующим образом.
При попадании движущегося объекта в створ траектории между двумя датчиками 1 и 2, а точнее, при подходе объекта к первому по ходу движения датчику 1, устройство запускается для измерения скорости путем воздействия на управляемые ключи 3 и 4 сигнала с выхода сработавшего ПЭ 6 (последний срабатывает при нарастании сигнала датчика 1 до максимума). В результате этого управляемые ключи 3 и 4 включаются и выходы обоих датчиков 1 и 2 подключаются к схеме измерения. На выходе ДУ 5 появляется сигнал отношения напряжений датчиков  , а на выходе ЛУ 7 (его коэффициент усиления выбирается равным
, а на выходе ЛУ 7 (его коэффициент усиления выбирается равным  ) - сигнал, представляющий собой половину текущего значения координатной функции
) - сигнал, представляющий собой половину текущего значения координатной функции  . Блок Диф 8 осуществляет дифференцирование по времени координатной функции и непрерывно выдает сигнал
. Блок Диф 8 осуществляет дифференцирование по времени координатной функции и непрерывно выдает сигнал  , поступающий на первый вход УУ 9. На второй вход УУ 9 подается сигнал, пропорциональный масштабирующему коэффициенту Se. Таким образом, на выходе УУ 9 непрерывно формируется сигнал
, поступающий на первый вход УУ 9. На второй вход УУ 9 подается сигнал, пропорциональный масштабирующему коэффициенту Se. Таким образом, на выходе УУ 9 непрерывно формируется сигнал  , прямо пропорциональный скорости движения объекта.
, прямо пропорциональный скорости движения объекта.
Использование заявляемых технических решений позволит достичь следующих технических результатов:
- повысить точность измерения за счет применения линеаризованной координатной функции;
- существенно упростить техническую реализацию способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169926C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2001 |
|
RU2208793C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2001 |
|
RU2199753C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2001 |
|
RU2208794C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2008 |
|
RU2381509C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2011 |
|
RU2477489C1 |
| Способ измерения скорости движущейся плазмы в магнитоплазменном электродинамическом ускорителе | 2016 |
|
RU2651633C1 |
| Способ измерения скорости движения проводника с током | 2019 |
|
RU2730885C1 |
| Способ измерения скорости движения объекта | 1991 |
|
SU1818588A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189599C1 |
Способ и устройство могут быть использованы для измерения параметров движения, в том числе закона изменения скорости по траектории движения, в частности движущегося проводника с током. Способ и устройство основаны на непрерывном измерении сигналов двух идентичных датчиков положения с колоколообразной передаточной характеристикой, установленных вдоль траектории движения, определении координатной функции, зависящей от выходных сигналов датчиков и положения (координаты) объекта, и использовании при вычислении скорости в качестве масштабирующего коэффициента величины перемещения объекта, соответствующего изменению выходного сигнала датчика положения в e раз. Устройство, кроме двух датчиков, двух управляемых ключей, делительного устройства, порогового элемента, дифференцирующего устройства и устройства управления, снабжено логарифмическим устройством, выход которого подключен к входу дифференцирующего устройства, а вход логарифмирующего устройства подключен к выходу делительного устройства, первый и второй входы которого соединены с выходами соответствующих управляемых ключей. Техническим результатом изобретений является повышение точности измерения за счет применения линеаризованной координатной функции и упрощение технической реализации способа. 2 с.п. ф-лы, 2 ил.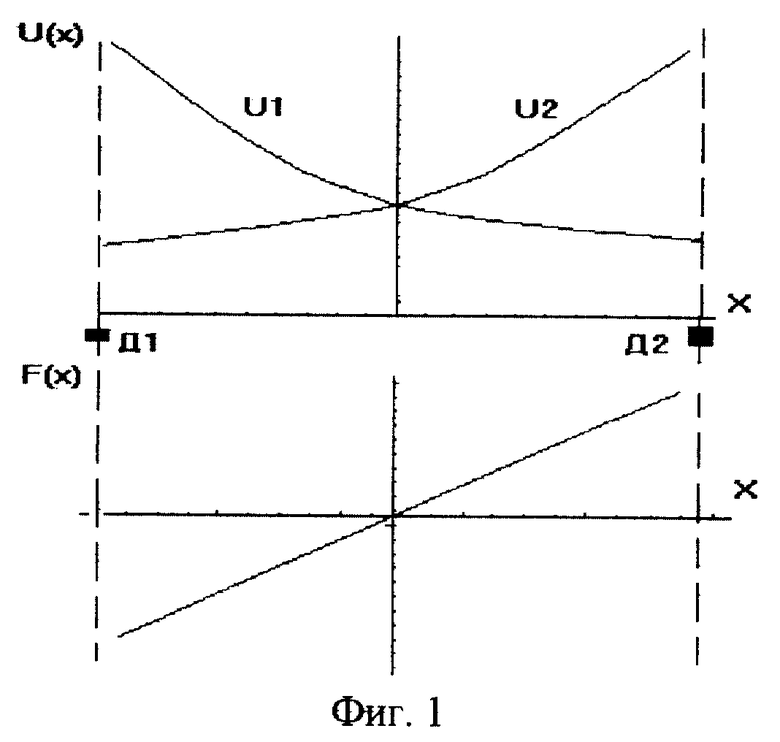
а скорость V определяют как
2. Устройство для измерения скорости объекта, содержащее два идентичных датчика положения с колоколообразной передаточной характеристикой, два управляемых ключа, пороговый элемент, делительное устройство, дифференцирующее устройство и устройство умножения, причем выходы первого и второго датчиков подключены к информационным входам соответствующих управляемых ключей, управляющие входы которых подключены к выходу порогового элемента, вход которого подключен к выходу первого по ходу движения датчика, выход дифференцирующего устройства подключен к первому входу устройства умножения, второй вход которого является входом всего устройства для измерения скорости, предназначенным для подачи сигнала, пропорционального величине масштабирующего коэффициента, а выход устройства умножения является выходом всего устройства для измерения скорости, отличающееся тем, что оно дополнительно снабжено логарифмирующим устройством, выход которого соединен с входом дифференцирующего устройства, выходы управляемых ключей подключены к соответствующим входам делительного устройства, выход которого соединен с входом логарифмирующего устройства.
| Способ измерения скорости движения объекта | 1991 |
|
SU1818588A1 |
| Способ измерения скорости движения проводника с током | 1988 |
|
SU1672377A1 |
| Способ измерения скорости движения объекта и устройство для его осуществления | 1988 |
|
SU1672378A1 |
| АВТОМАТНАЯ ЛЕГИРОВАННАЯ СТАЛЬ | 1997 |
|
RU2128724C1 |
