Изобретение относится к измерительной технике и может быть использовано для бесконтактного дистанционного измерения скорости линейного перемещения с помощью датчиков, например индуктивных.
Цель изобретения - повышение точности и информативности измерения скорости без увеличения количества датчиков.
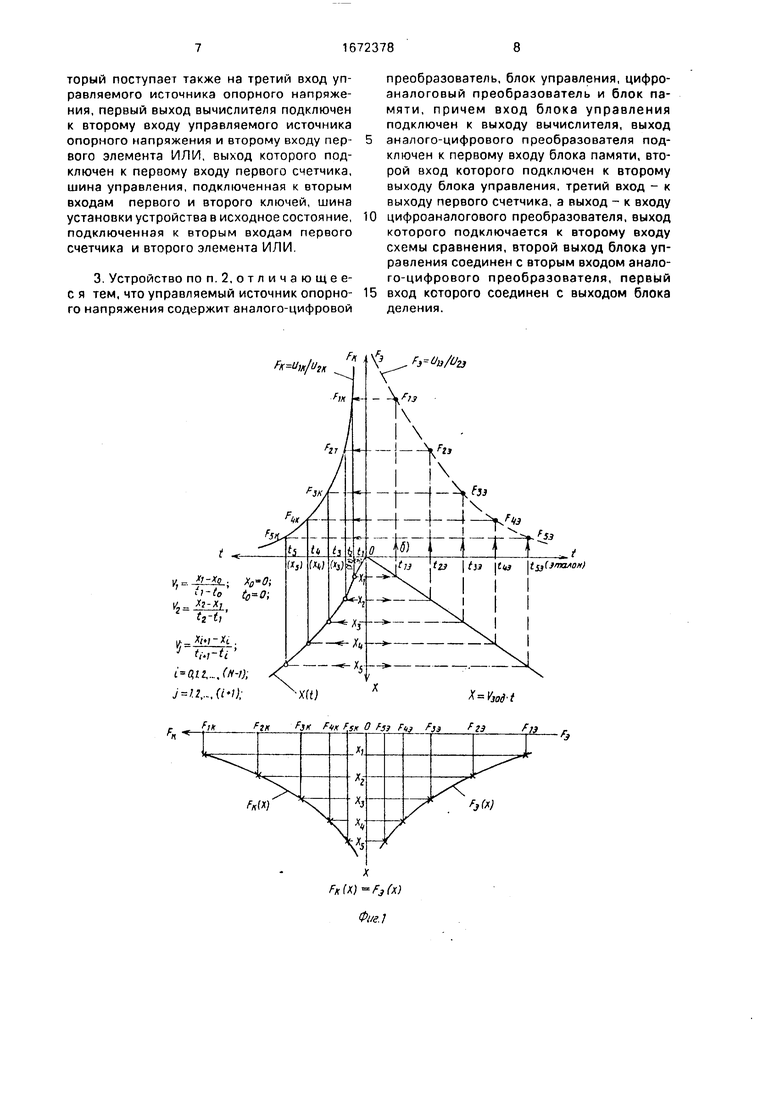
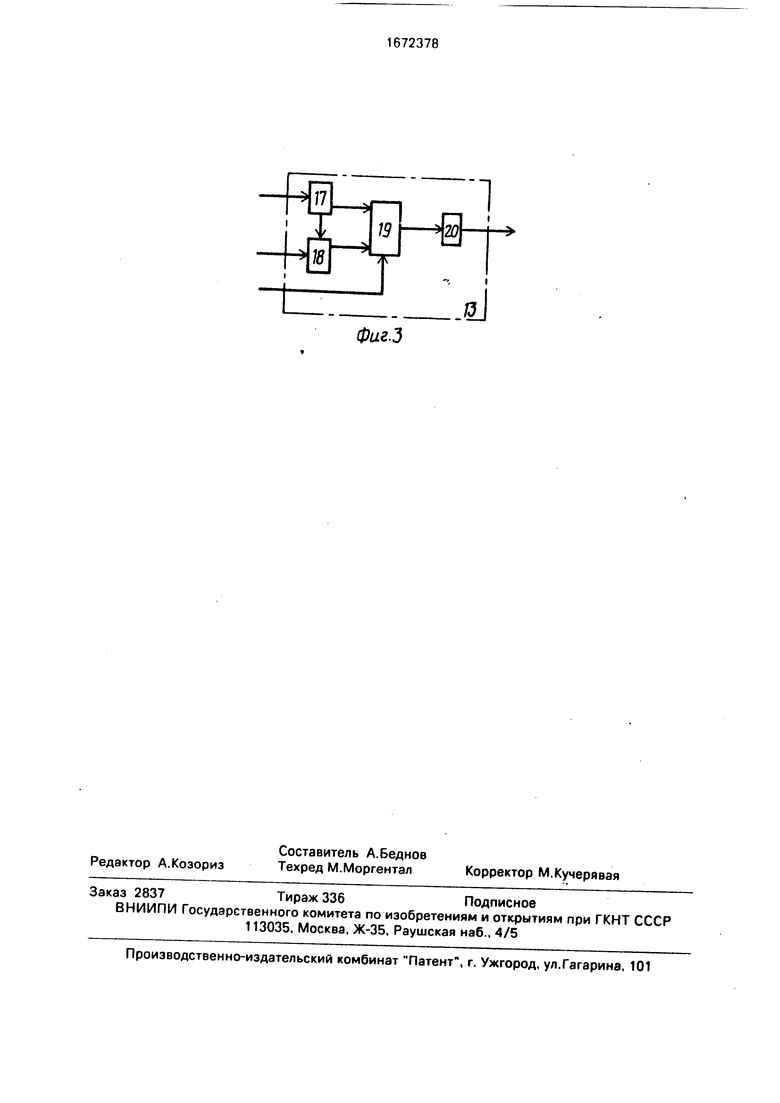
На фиг. 1 показан график, характеризующий предлагаемый способ; на фиг 2 - устройство для реализации способа: на фиг. 3 - блок-схема управляемого источника опорного напряжения.
Сущность способа измерения скорости заключается в следующем.
Предварительно для начала измерения производят калибровку устройства посредством задания координат Xi точек регистрации объекта на пути движения между двумя датчиками, пропускают по этому пути эталонный объект с постоянной скоростью V3 измеряют напряжения Ubft) и U2o(t) возмущения объектом датчиков, вычисляют и запо- с Vi3i(t) минают значения отношении Ж
для предварительно рассчитанных моментов времени ti Xi/V3 в заданных точках координат Xi
Далее в процессе измерения скорости реального объекта измеряю текущие значения напряжении 1)1к(т.) и (t) иозмуще- ния объектом датчиков, вычисляют
с Vik(0 отношение Fk тт-л
(l)
и сравнивают величину этого отношения с величиной Fii, полученной в результате калибровки. При равенстве величин F и F3i производят фиксацию времени ti прохождения объектом координат Xi и далее рассчитывают значения скорости по формуле
V,
ЛХ)
г, + 1 - ti At, где I 0, 1,2.3, . . (N-1).
J-1.2.3...0+1):
N - заданное количество течек регистрации.
Устройство содержит индуктивные датчики 1 и 2, блок 3 деления, блок 4 выделения максимума сигнала, управляемые ключи 5 и 6, схему 1 сравнения, два счетчика 8 и 9 импульсов, две схемы ИЛИ 10 и 11, генератор 12 импульсов, управляемый источник 13 опорного напряжения, вычислитель 14, шину 15 управления и шину 16 приведения устройства в исходное состояние.
Управляемый источник 13 опорного напряжения содержит схему 17 управления, одним выходом подключенную к рналого- цифровому преобразователю 18, а другим
выходом - к первому входу блока 19 памяти, к второму входу которого подключен выход аналого-цифрового преобразователя 18, а выход блока 19 памяти - к входу цифроаналотового 20 преобразователя.
Устройство работает следующим образом.
Предварительно до начала измерения производят калибровку устройства. Для это0 го в вычислитель 14 заносят координаты Х| точек регистрации объекта, на которые разбивают весь путь и величину постоянной скорости /э, на шину 16 подают сигнал установки устройства в исходное состояние,
5 на шину 15 управления подают сигнал установки устройства в режим калибровки, при этом ключ 5 замыкается, а ключ 6 размыкается, и запускают эталонный объект по траектории движения В момент прохождения
0 объектом датчика 1 в последнем возбуждается сигнэ 1 и при достижении максимального значения срабатывает блок 4 выделения максимума сигнала, с выхода которого сигнал через замкнутый ключ 5 по5 ггупает на вход вычислителя 14, который начинает отсчитывать интервалы времени ti, за которые эталонный объект достигает точек траектории с координатами Xi. В момент равенства величины ti и величины tia, рас0 считанной вычислителем 14 из величин Х| и Vs. на выходе вычислителя 14 появляется сигнал, который поступает в управляемый исючник 13 опорного напряжения, где происходит запись 6 памяти величины сигнала,
5 поступающего с выхода блока 3 деления, и через первый элемент ИЛИ 10 на счетный вход первого счетчика 9, код выхода которого увеличивается на единицу и поступает в управляемый источник 13 опорного напря0 жения для подключения следующей ячейки памяти, а также в вычислитель 14 для выбора следующего значения ti+13 для следующей расчетной точки с координатой Хм и так далее, пока не произойдет запись вели5 чин сигналов, поступающих из блока 3 деления в управляемый источник 13 опорного напряжения, для всех расчетных точек, расположенных на траектории движения объекта между двумя датчиками.
0В результате калибровки устройства в
блоке памяти управляемого источника 13 будут записаны величины значений отношений напряжений двух датчиков для точек траектории движения объекта с заданными
5 координатами Xi
Для осуществления измерения скорости перемещения реального объекта снимают с шины 15 управления, в результате чего кпюч 5 размыкается, а ключ П замыкается, и снова подают сигнал на
шину 16, т.е. переключают устройство из режима калибровки в рабочий режим и приводят его в исходное состояние. При этом 7на выходе управляемого источника 13 опорного напряжения устанавливается на- пряжение, соответствующее нахождению объекта в точке траектории с координатой XL После пуска контролируемого обьекта происходит сравнение на схеме 7 непрерывного сигнала FK1 получаемогоо в резуль- тате деления сигналов двух датчиков в блоке 3 и фиксированного значения сигнала Pis, поступающего с выхода управляемого источника 13 опорного напряжения. При поступлении равенства этих сигналов на выхо- де схемы 7 сравнения формируется импульс калиброванной длительности, который поступает на вход первого счетчика 9 запускания его на первый вход первого элемента 10 ИЛИ и на пятый вход вычислителя 14. На второй вход первого счетчика 9 поступают импульсы от генератора 12, заполняя счетчик до момента прихода переднего фронта следующего импульса от схемы 7 сравнения, т.е. происходит подсчет количества им- пульсов от генератора 12 за премя между двумя импульсами от схемы 7 сравнения, а код на выходе счетчика 8 пропорционален времени прохода обьекта между двумя соседними точками регистрации Xi и Хг на траектории движения. Импульс с выхода схемы ИЛИ 10 поступает на вход первого счетчика 9, увеличивая выходной код последнего на единицу, который noqTynaeT на адресный вход блока 19 памяти управляв- мого источника 13 опорного напряжения, т.е. происходит выборка из памяти блока 13 следующего значения Р2Э для следующей точки с такой же координатой Х2 и т.д. до тех пор, пока объект не пройдет мимо всех то- чек регистрации Xi до датчика 2. Вычисление и запоминание скорости на каждом интервале происходит в вычислителе 14. По окончании процесса измерения с выхода вычислителя можно получить информацию о скорости обьекта как в любой точке Xi регистрации, так и на всем участке пути между двумя датчиками.
Формула изобретения 1. Способ измерения скорости движе- ния обьекта, заключающийся в измерении интервала времени прохождения объектом заданного расстояния между двумя датчиками, отличающийся тем, что, с целью повышения точности и информативности измерения скорости без увеличения количества датчиков, предварительно производят калибровку устройства посредством задания координат Xi на пути между двумя датчиками, пропускания по этому пути с
ных
постоянной скоростью Vs эталонного объек-. та, измерения напряжения Ui3(t) и U2s(t) возмущения объектом датчиков, вычисления и запоминания значения отношения выходс Vis(t) сигналов датчиков гЭ| -у-л4 для
предварительно рассчитанных значений
Xi моментов времени ti3 rr-, в которые
V3
эталонный объект проходит заданные координаты Х2. после чего в процессе измерения скорости контролируемого объекта измеряют текущие значения напряжений UiKi(t) и
) вычисляют отношение Fk у t .
сравнивают величину F« с величиной F9i, полученной в результате калибровки, запоминают моменты времени ti их равенства и далее производят расчет значений скорости по формуле
Xi + 1 - Xi J ti + i -tf где 1,2,3(N-1);
j 1,2,3(i+1):
N - заданное количество точек регистрации.
2. Устройство для измерения скорости движения обьекта, содержащее два датчика, установленных вдоль траектории движения, схему сравнения, два счетчика и генератор импульсов, отличающееся тем, что, с целью повышения точности и информативности измерений, в него дополнительно введены блок деления, блок выделения максимума сигнала, управляемый источник опорного напряжения, два элемента ИЛИ, вычислитель, два ключа, шина установки устройства в исходное состояние и шина управления, причем блок деления подключен входами к датчикам, а выходом - к первому входу управляемого источника опорного напряжения и через второй ключ - к первому входу схемы сравнения, второй вход которой подключен к выходу управляемого источника опорногоо напряжения, а выход схемы сравнения - к первому входу второго счетчика, первому входу первого элемента ИЛИ, первому входу второго элемента ИЛИ и первому входу вычислителя, вход блока выделения максимума сигнала подключен к первому датчику, а выход блока через первый ключ - к второму входу вычислителя, на третий и четвертый вход которого подаются коды величин Xi и V3, на пятый вход - код выхода второго счетчика, второй вход которого подключен к выходу генератора импульсов, а третий вход - к выходу второго элемента ИЛИ, на шестой вход вы- читателя - код выхода первого счетчика, который поступает также на третий вход управляемого источника опорного напряжения, первый выход вычислителя подключен к второму входу управляемого источника опорного напряжения и второму входу первого элемента ИЛИ, выход которого подключен к первому входу первого счетчика, шина управления, подключенная к вторым входам первого и второго ключей, шина установки устройства в исходное состояние, подключенная к вторым входам первого счетчика и второго элемента ИЛИ.
3. Устройство по п. 2, о т л и ч а ю щ е е- с я тем, что управляемый источник опорного напряжения содержит аналого-цифровой
преобразователь, блок управления, цифро- аналоговый преобразователь и блок памяти, причем вход блока управления подключен к выходу вычислителя, выход
аналого-цифрового преобразователя подключен к первому входу блока памяти, второй вход которого подключен к второму выходу блока управления, третий вход - к выходу первого счетчика, а выход - к входу
цифроаналогового преобразователя, выход которого подключается к второму входу схемы сравнения, второй выход блока управления соединен с вторым входом аналого-цифрового преобразователя, первый
вход которого соединен с выходом блока деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2001 |
|
RU2208794C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2005 |
|
RU2322680C2 |
| Способ измерения скорости движения объекта | 1988 |
|
SU1744652A1 |
| Устройство регулирования температуры | 1977 |
|
SU796805A1 |
| Устройство для измерения скорости перемещения | 1987 |
|
SU1615618A1 |
| Устройство для определения приращения дальности до излучателя на подвижном объекте | 1990 |
|
SU1838798A3 |
| Устройство для контроля состояния объекта | 1983 |
|
SU1119055A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172960C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169926C1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения скорости линейного перемещения с помощью датчиков, например, индуктивных. Цель изобретения - повышение точности и информативности измерения скорости без увеличения количества датчиков. Способ измерения скорости заключается в предварительной калибровке устройства для его реализации при движении эталонного объекта с постоянной скоростью регистрации напряжений возмущения проходящим объектом индуктивных датчиков, вычислении и запоминании отношения величин напряжения для предварительно рассчитанных моментов времени в заданных точках координат, после чего проводят аналогичные операции при движении контролируемого объекта, а скорость определяют из выражения VJ = ΔХJ / Δ TJ где J = 1, 2, 3...(I + 1), I = 0, 1, 2...(N - 1), N - заданное количество точек регистрации. Устройство, реализующее способ, работает в режимах калибровки и измерения. В результате калибровки в блоке памяти управляемого источника 13 опорного напряжения будут записаны величины значений отношений напряжений двух датчиков для точек траектории движения объекта с заданными координатами. После пуска контролируемого объекта происходит сравнение на схеме 7 непрерывного сигнала, получаемого в блоке 3 деления, и фиксированного сигнала с управляемого источника 13 опорного напряжения. Вычисление и запоминание скорости на каждом интервале происходит в вычислителе 14. 2 с.и 1 з.п. ф-лы, 3 ил.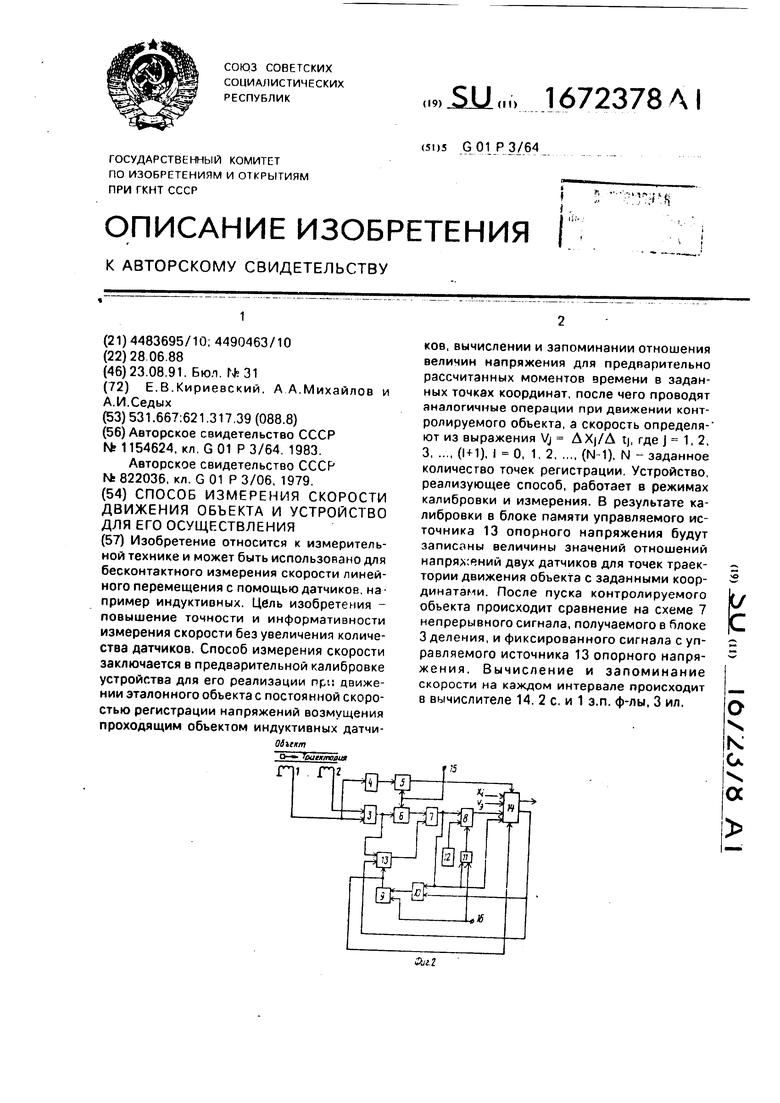
fx t/u/t/t
Ууд -у /; о-
„ И
1/- Xjti-Xt .
,ll,..,(N-t); ,..,();
r
FtK FjK ffx 0 fs3 Fig f}3 f 23
3 F3 Uo/Uu
-X
I - -I--V.
-M-V
-|
. .. I ,. л.., I« . .
V ti |Ј« rXf-
X VJ0d-t
ML
фиг.З
| Авторское свидетельство СССР N 1154624, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Датчик скорости перемещения | 1979 |
|
SU822036A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
