. Изобретение относится к приводным электрическим двигателям систем авто матики и может быть использовано для электроприводов, регулируемых с высо кой точностью при повышенных требованиях к надежности . Известны вентильные электродвигатели (БД) содержащие коммутатор, силовой вход которого подключен .к источнику напряжения, а его выходы соединены с обмотками двигателя. Управляющие входы коммутатора подключены к соответйтвующим выходам счетчика импульсов, установочные вхЬды которого подключены к датчикам положения ротора через элементы И, а управляющий вход счетчика соединен с генератором опорной частоты Cll UJ. Недостатком этих устройств являет ся наличие датчиков положения ротора по числу фаз обмотки и значительного числа соединительных проводов между двигателем и устройством управления. Наиболее близким по технической сущности к предлагаемому является БД, содержащий коммутатор, выход которого соединен с обмоткой двигателя, а его управляющие входы подключены к соответствующим выходам счет.чика импульсов, входы которого под-. ключены к выходам чувствительных элементов датчика положения ротора, а его установочный вход соединен с выходом датчика углового положения неподвижного ротора Сз . Недостатком известного устройства является наличие большого количества чувствительных элементов датчика положения ротора. Этот недостаток особенно характерен, когда необходимо уменьшить число соединительных проводников, которое растет с увеличением числа фаз обмотки двигателя . Цель изобретения - упрощение конструкции и повышение надежности ВД. Поставленная цель достигается тем, что в БД введены элементы И, ИЛИ, триггер, фазовый дискриминатор, корректирующее устройство, делитель частоты и генератор опорной частоты, которого соединен с входом делителя частоты и с первым входом фазового дискриминатора, выход которого через корректирующее устройство соединен с дополнительным входом коммутатора, а его второй вход соединен с выходом датчика частоты вращения и подключен к первому входу первого элемента И, второй вход которого соединен с одним выходом триггера; а его выход подключен к первому входу элемента ИЛИ, выход которого соединен со входом счетчика импульсов, а его второй вход подключен к выходу второго элемента И, первый вход которого соединен с выходом делителя частоты, а его второй вход подключен к второму выходу триггераJ вход которого объединен с установочным входом счетчика импульсов и. соединен с выходом датчика углового положения неподвйж,ного ротора.
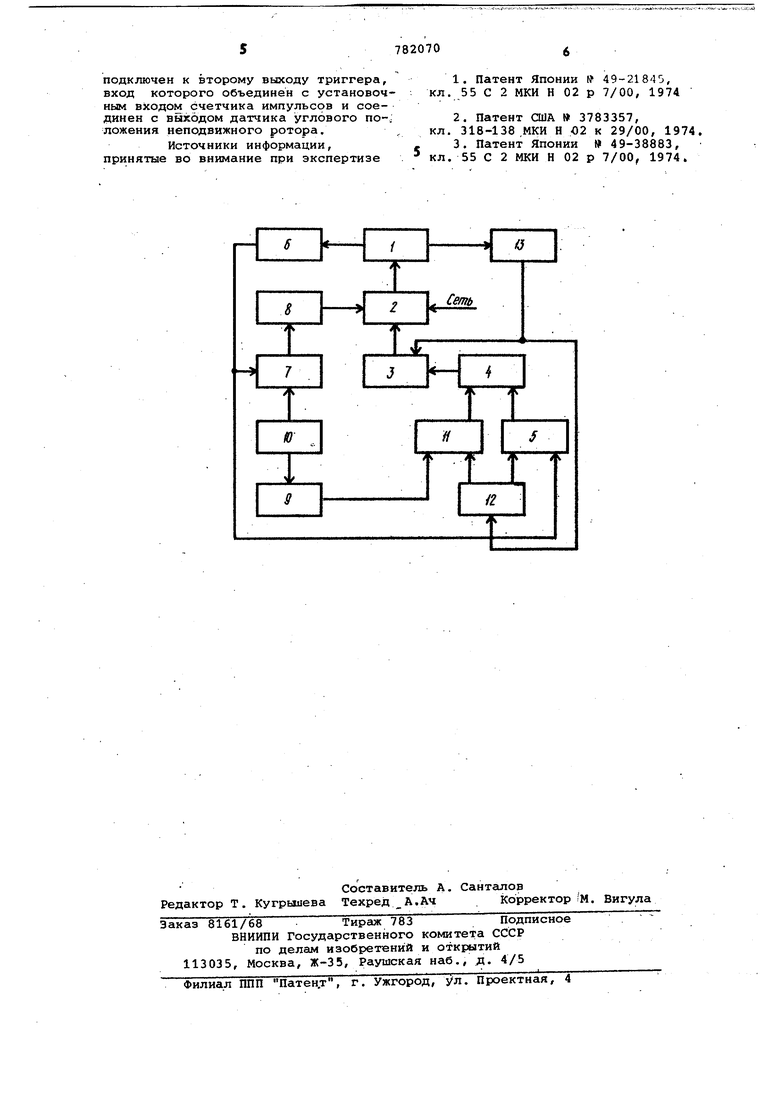
На чертеже приведена функциональная схема устройства.
Электродвигатель 1 соединен с. источником питания через коммутатор 2, управлякядие входы которого подключены к соответствующим выходам счетчика 3 HMnyJTbcoB, вход которого соединен через элементы ИЛИ 4, И 5 с выходом импульсного датчика 6 частоты вращения и выходом фазового дискриминатора 7. Упомянутый выход фазового дискриминат тора подключен к дополнительйому входу коммутатора через корректирукйцеё устройство 8. Второй вход фазового дискриминатора объеДйнён со входном делителя -9. частоты и подключен к выходу генератора 10 импульсов опорной частоты. Выход делителя частоты соединен через элемент И 11 со вторым входом элемента ИЛИ. Второй вход элемента. И подключен ко второму выходу триггера 12, первый выход которого .
гГддЮтйчён из входов первого элемента И. Вход триггера объединен с установочным входом счетчика импулбСов и подключен к датчику 13 углового положения неподвижного ротора. Устройство работает следующим образом. : . . /; . ; ;,
При п-уске электродвигателя на вход счетчика 3 импульсов поддаются импульсы с выхода делителя 9 частоты через открытый сигналом с выхода триггер 12 элемент И 11 и элемент ИЛИ 4. В этом случае сигналы управления коммутатором 2 формируются счетчиком 3 импульсов с частотой несколько ниже частоты приемистости электродвигателя 1 . Ротор двигателя 1 начинает повбрачиватьСя в заданном направлении, которое определяется порядком следования сиг налов. пер1еключения фаз обмотйй двигателя, до момента появления импульса на выходе датчику. 13 углового положения неподвижного ротора. Передний фронт этого импульса напряжения соответствует моменту включения первой азы обмотки двигателя. Импульс напряжений с датчика неподвижного pbtoра переключает триггер 12 .и обнуляет четчик 3 импульсов. При этом вклюается первая фаза обмотки двигатея, запирается элемент И 11 и открыаеТ;СЯ элемент И 5 . В этом Случае на ход счетчика 3 импульсов через элеент И 5 и ИЛИ 6 начинают подаваться
импульсы напряжения с импульсного датчика 6 частоты вращения, частота которых повышается по мере разгона двигателя, соответственно этому повышается частота переключения фаз обмотки. Электродвигатель разгоняется по Своей естественной характеристике до момента, когда частота опорного генератора и датчика частоты вращения совпадают. Тогда появляются импульсы напряжения на выходе фазового дискриминатора 7, длительность которых равна разности фаз между импульсами опорной частоты и импульсами частоты вращений. Эти импульсы через корректирующее устрой.ство 8 подаются на дополнительный вход коммутатора 2. При эт&м частота вращения двигателя кратна частоте опорного генератора и поддерживается с высокой точностью, определяемой стабильностью генератора опорной частоты .
Применение такого устройства управления позволяет сократить число чувствительных элементов датчика, , устанавливаемых на двигателе до двух, независимо от числа фаз обмотки. При этом значительно сокращается число соединительных проводников, упрощается конструкция электродвигателя и повышается надежность работы всего устройства .
Формула изобретения
Устройство для управления п -фазным бесконтактным двигателем постоянного тока, содержащее коммутатор, выход которого соединен с обмоткой двигателя, а его управляющие входы подключены к соответствующим выходам счетчика импульсов, вход которого подключен к выходу датчика частоты вращения, а его установочный вход соединён с выходом датчика углового положения неподвижного ротора, о т л и ч а:ю щ ее с я тем, .что, с цель упрощения.конструкции устройства, в него введены элементы И, ИЛИ, триггер фазЬвый дискриминатор, корректирующее уст ройство,. делитель частоты и гёкератор опорной частоты, выход которого соединен с входом делителя частоты и с пёрвьм входом фазового дискриминатора, выход которого через корректируницее устройство соединен с дополнительным входом коммутатора, а его второй вход соединен с выходом датчика частоты Вращения и подключен к первому входупервого элемента И, второй вход которого соединен с одним из выходов тригге{)а, а его выход подключен K первому входу элемента ИЛИ, выход которого соединен с входом счетчика импульсов, а его.второй вход подключен к выходу второго элемента И, первый вход которого соединен с выходом делителя частоты, а его второй вход
подключен к второму выходу триггера, вход которого объединен с установочным входом счетчика импульсов и соединен с выходом датчика углового по-; ложения неподвижного ротора.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии № 49-21845, кл. 55 С 2 МКИ Н 02 р 7/00, 1974
2.Патент США 3783357,
кл. 318-138,МКИ Н 02 к 29/00, 1974.
3.Патент Японии 49-38883, кл. 55 С 2 МКИ Н 02 р 7/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Импульсно-фазовая следящая система | 1982 |
|
SU1023280A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| Устройство для управления реверсивным электродвигателем | 1978 |
|
SU782071A1 |
| Устройство для контроля параметров двигателя внутреннего сгорания | 1983 |
|
SU1138684A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Устройство для считывания графической информации | 1989 |
|
SU1683046A1 |
