Изобретение относится к средствам контроля состояния рельсового подвижного состава и предназначено для оценки угла набегания на рельс колес грузовых и пассажирских вагонов и локомотивов в условиях эксплуатации.
Известно устройство, содержащее два прибора для измерения перемещений, которые закреплены на буксе вагона по обе стороны колеса и движки которых прижимаются к рабочей боковой грани головки рельса железнодорожной колеи. Угол набегания колеса на рельс определяют по разности показаний двух приборов. Недостатком такого устройства является низкая надежность и практическая невозможность применения для выявления "перекоса" колесных пар вагонов в эксплуатации, обусловленная необходимостью размещения измерительных датчиков на подвижных единицах (Решетилов С.И. Измерение угла набегания колеса на рельс. Вестник ВНИИЖТ, 1987, N 4, с.32).
В качестве ближайшего аналога принято устройство, которое включает в себя напольный комплект, содержащий два светоизлучателя, ориентированные в противоположные стороны от продольной оси рельсового пути, два светоприемника, каждый из которых ориентирован на соответствующий светоизлучатель, и блок обработки сигнала, подключенный входами к выходам светоприемников, а выходом к регистратору, и каждый из светоприемников выполнен в виде линейки из N расположенных с фиксированным шагом фотоэлементов, причем правая и левая линейки установлены на пути параллельно и симметрично относительно продольной оси рельсовой колеи в зоне засветки соответственно левым и правым светоизлучателем на высоте оси колесной пары вагона, а блок обработки сигнала выполнен в виде счетчика максимальной разности затемненных или засвеченных фотоэлементов правой и левой светоприемных линеек. (Зыков Ю.В., Глаголев Е. В. , Нетеса А.Г. Устройство для определения угла набегания колеса грузового вагона на рельс. Патент РФ N 2108251, БИ, 1998, N 10).
Недостаток аналога заключается в том, что расположение линии оптического сканирования на высоте оси колесной пары обуславливает невозможность контроля колесных пар с тормозными колодками и вероятность ложных показаний от таких элементов подвижного состава, как тормозные рукава, в то время как опускание линии сканирования ниже оси колесной пары приводит к существенному увеличению погрешности измерения, связанной с разбросом значений диаметра колес в колесной паре и различиями в уровнях поверхности катания рельсов правой и левой ниток пути, в том числе за счет "проседания" рельса при проходе подвижного состава.
Техническим результатом, на достижение которого направлено данное изобретение, является устранение указанного недостатка. Технический результат достигается тем, что устройство снабжено дополнительным напольным комплектом, состоящим из светоизлучателей и светоприемников, которые расположены зеркально относительно перпендикуляра к оси пути по отношению к светоизлучателям и светоприемникам основного напольного комплекта, причем расстояние между первыми по ходу движения фотоэлементами основного и дополнительного комплектов не превышает длину теневой проекции хорды колеса дев уровне оптического сканирования на линию расположения светоприемных линеек, а расстояние между последними по ходу движения фотоэлементами основного и дополнительного комплектов не менее длины теневой проекции хорды колеса на уровне сканирования на линию расположения светоприемных линеек, и блок обработки выполнен в виде двух счетчиков разности затемненных фотоэлементов, полусумматора и синхронизатора, причем входы первого счетчика подключены соответственно к выходам левосторонних линеек основного и дополнительного напольного комплекта, входы второго счетчика - к выходам правосторонних светоприемных линеек основного и дополнительного напольного комплекта, а выходы счетчиков подключены к счетным входам полусумматора, выход которого соединен с регистратором, а стробирующий вход - с выходом синхронизатора, подключенного входами к выходам светоприемных линеек основного напольного комплекта.
На чертеже приведена функциональная схема предлагаемого устройства, содержащая рельсовый путь с рельсами 1-л и 1-п, колесную пару с колесами 2-л и 2-п, светоизлучающую 3-н-л, 3-н-п, 3-с-л и 3-с-п, светоприемные линейки 4-н-л, 4-н-п, 4-с-л и 4-с-п с эментарными фотоприемниками 4-н-л-1... 4-н-л-N, 4-н-п-1...4-н-п-N, 4-с-л-1...4-c-л-N и 4-п-1...4-c-п-N соответственно, а также вычислительные блоки 5, 6, полусумматор 7, синхронизатор 8 и регистратор 9.
При включенном устройстве и отсутствии в зоне его действиям колесной пары светоизлучатель 3-н-л засвечивает все фотоприемники 4-н-п, светоизлучатель 3-н-п засвечивают все фотоприемники линейки 4-н-п, светоизлучатель 3-с-л засвечивает все фотоприемники линейки 4-с-п, а светоизлучатель 3-с-п засвечивает все фотоприемники линейки 4-с-л. Блоки 5, 6 и 7 фиксируют засвеченное состояние всех фотоэлементов и, следовательно, нулевую разность числа затемненных фотоэлементов правой и левой светоприемных линеек.
Если на участок рельсового пути накатывается колесная пара без перекоса, причем диаметры правого и левого колеса абсолютно одинаковы, а "проседание" рельсов отсутствует, тогда происходит следующее. Сначала последовательно и синхронно затемняются симметричные пары фотоэлементов линеек 4-с-л и 4-с-п, а именно сначала фотоэлементы 4-с-л-N и 4-c-п-N и далее до пары 4-с-л-1 и 4-с-п-1, затем симметричные пары фотоэлементов линеек 4-н-л и 4-н-п, а именно сначала фотоэлементы 4-н-л-1 и 4-н-п-1, 4-н-л-2 и 4-н-п-2 и так далее до пары 4-н-л-N и 4-н-п-N. Причем, поскольку расстояние между первыми по ходу движения фотоэлементами 4-с и 4-н выбирается не более длины теневой проекции хорды колеса на высоте сканирования на линию расположения светоприемных линеек, одновременно с процессом затемнения фотоэлементов линеек 4-н-л и 4-н-п сбегающей кромкой колеса идет процесс последовательного засвечивания фотоэлементов линеек 4-с-л и 4-с-п. Так, если длина хорды "укладывается" между позициями фотоэлементов 4-н-1 и 4-с-4, к моменту затемнения набегающей кромкой колеса фотоэлементов 4-н-л-1 и 4-н-п-1 засвечиваемыми оказываются фотоэлементы 4-с-л-N и 4-с-п-N и далее до 4-с-л-4 и 4-с-п-4, а затемненными - фотоэлементы 4-с-л-1 и 4-с-п-1, 4-с-л-2 и 4-с-п-2, 4-с-л-3 и 4-с-п-3.
Обозначим: А - число затемненных фотоэлементов линейки 4-н-л, В - число затемненных фотоэлементов линейки 4-с-л, C - число затемненных фотоэлементов линейки 4-н-п и D - число затемненных фотоэлементов линейки 4-с-п для момента времени, соответствующего ситуации накатывания колесной пары на линейки 4-н-л и 4-н-п, при которой одновременно оказываются затемненными фотоэлементы 4-н-л-1 и 4-н-п-1, но остается засвеченным или 4-н-л-2, или 4-н-п-2, что является условием выработки строб-импульса, разрешающего счетные измерительные операции.
Тогда для указанной выше ситуации "без перекоса и проседания" можно записать следующее:
A = 1; B = 3; C = 1; D = 3.
При этом показание "левого" счетчика 5 равняется
B-A = 3-1 = 2,
показание "правого" счетчика 6 равняется
C-D = 1-3 = -2,
и на выходе полусумматора будет показание
(B-A)+(C-D)/2=2+(-2)/2=0,
что соответствует прохождению колесной пары без перекоса.
Если же колесная пара без перекоса накатывается на участок, где, например, имеет место проседание левой рельсовой нитки и величину, при которой теневая длина хорды на уровне сканирования увеличивается по набегающей и сбегающей кромками колеса на величину, равную шагу расположения фотоэлементов в светоприемных линейках, происходит следующее.
К моменту затемнения набегающей кромкой правого колеса первого фотоэлемента правой светоприемной линейки 4-н-п, то есть 4-н-п-1, на линейке 4-н-л будут затемнены два фотоэлемента, а именно 4-н-л-1 и 4-н-л-2. При этом на линейке 4-с-п будут затемнены фотоэлементы 4-с-п-1, 4-с-п-2, 4-с-п-3, а на линейке 4-с-л будут затемнены фотоэлементы 4-с-л-1, 4-с-л-2, 4-с-л-3 и 4-с-л-4.
Для этой ситуации:
A = 2; B =4; C =1; D = 3,
показание "левого" счетчика 5 равняется
B-A = 4-2 =2,
показание "правого" счетчика 6 равняется
C-D = 1-3 = -2,
и на выходе полусумматора 7 будет показание
(B-A)+(C-D)/2=(2-2)/2 = 0,
что соответствует отсутствию перекоса контролируемой колесной пары.
Если на участок, где отсутствует проседание рельсов, накатывается колесная пара с перекосом, при котором, например, левое колесо "забегает" на величину, соответствующую одному шагу расположения фотоэлементов, тогда:
A = 2; B = 2; C =1; D = 3;
показание "левого" счетчика 5 равняется
B-A=2-2=0,
показание "правого" счетчика 6 равняется
C-D=1-3=-2.
и на выходе полусумматора 7 будет показание
(B-A)+(C-D)/2=0-2/2=-1,
что соответствует "забеганию" левого колеса на один измерительный шаг.
Если на участок, где отсутствует проседание рельсов, накатывается колесная пара с перекосом, при котором на один измерительный шаг "забегает" правое колесо, тогда к моменту затемнения фотоэлемента 4-н-л-1 и 4-н-п-1 и 4-н-п-2 ситуация будет характеризоваться следующими значениями:
A=1; B=3; C=2; D=2,
показание "левого" счетчика 5 равняется
B-A=3-1=2,
показание "правого" счетчика 6 равняется
C-D=2-2=0,
и на выходе полусумматора 7 будет показание
(B-A)+(C-D)/2=2-0/2 =+1,
что соответствует забеганию на один измерительный шаг правого колеса.
Для ситуации с проседанием рельса левой нитки пути на величину, эквивалентную увеличению хорды колеса на один измерительный шаг по набегающей и сбегающей кромкам, и забеганием левого колеса на один измерительный шаг:
A=3; B=3; C=1; D=3;
показание "левого" счетчика 5 равняется
B-A=3-3=0.
показание "правого" счетчика 6 равняется
C-D=1-3=-2.
и на выходе полусумматора 7 будет показание
(B-A)+(C-D)/2=0-2/2=-1,
что соответствует "забеганию" на один измерительный шаг левого колеса.
Для ситуации с проседанием рельса левой нитки пути на величину, эквивалентную увеличению длины хорды на один измерительный шаг по набегающей и сбегающей кромкам колеса, и "забеганнем" на один измерительный шаг правого колеса:
A=2; B=4; C=2; D=2
показание "левого" счетчика 5 равняется
(B-A)=(4-2)=2,
показание "правого" счетчика 6 равняется
(C-D)=(2-2) = 0
и на выходе полусумматора
(B - A) + (C - D)/2 = (2 - 0)/2 = +1,
что соответствует "забеганию" на один измерительный шаг правого колеса.
Таким образом происходит измерение величины перекоса колесной пары с компенсацией погрешности, связанной с изменением длины хорды колеса на уровне оптического сканирования.
Блок хронирования 8 вырабатывает строб-сигнал, включающий процесс чтения состояния фотоэлементов светоприемиых линеек при одновременном затемнении фотоэлементов 4-н-л-1 и 4-н-п-1.
Пересчет значений разности числа затемненных фотоэлементов правой и левой светоприемных линеек основного и дополнительного комплектов в значения перекоса (в миллиметрах) или угла набегания (в миллирадианах) осуществляется автоматически с учетом величины шага размещения фотоэлементов в линейках и геометрических параметров схемы расположения светоизлучателей и светоприемников относительно рельсового пути.
Диапазон значений перекоса или угла набегания устанавливается выбором длины светоприемных линеек, дискретность измерения - выбором шага размещения фотоэлементов в ячейках.
Предлагаемое устройство позволяет измерять перекос и/или угол набегания на рельс колес грузовых и пассажирских вагонов и локомотивов, находящихся в эксплуатации, на ходу поезда или в условиях депо, с исследовательскими или эксплуатационными целями.
Изобретение предназначено для оценки угла набегания на рельс колеса вагонов и локомотивов. Устройство содержит светоизлучатели, ориентированные в противоположные стороны от продольной оси рельсового пути. Перед светоизлучателями по ходу движения расположены светоприемники. Каждый из светоприемников выполнен в виде линейки из N расположенных с фиксированным шагом фотоэлементов. Правая и левая линейки установлены параллельно и симметрично относительно продольной оси рельсовой колеи в зоне засветки соответственно левым и правым светоизлучателем. Имеются также блок обработки и регистратор. Расстояние между первыми по ходу движения фотоэлементами основного и дополнительного комплектов не превышает длину теневой проекции хорды колеса по уровню сканирования на линию расположения светоприемных линеек, а расстояние между последними по ходу движения фотоэлементами основного и дополнительного комплектов не менее длины теневой проекции хорды колеса по уровню сканирования на линию расположения светоприемных линеек. Блок обработки состоит из двух счетчиков разности затемненных фотоэлементов, полусумматора и синхронизатора. Технический результат - уменьшение погрешности измерений. 1 ил.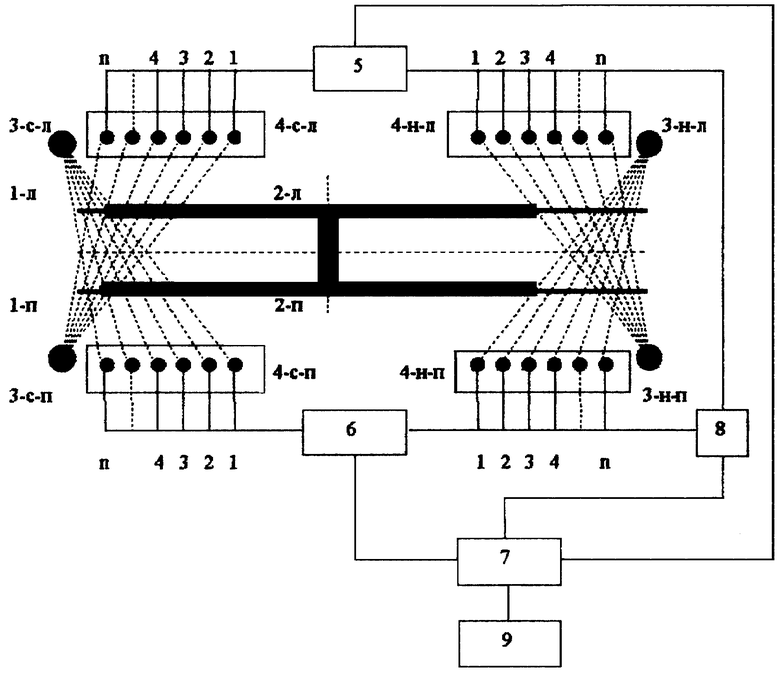
Устройство для определения угла набегания колеса подвижной рельсовой единицы на рельс, содержащее напольный комплект, состоящий из двух светоизлучателей, ориентированных в противоположные стороны от продольной оси рельсового пути, двух расположенных по ходу движения перед светоизлучателями светоприемников, каждый из которых ориентирован на соответствующий светоизлучатель и выполнен в виде линейки из N расположенных с фиксированным шагом фотоэлементов, причем правая и левая линейки установлены параллельно и симметрично относительно продольной оси рельсовой колеи в зоне засветки соответственно левым и правым светоизлучателем, а также блок обработки и регистратор, отличающееся тем, что оно снабжено дополнительным напольным комплектом, состоящим из светоизлучателей и светоприемников, которые расположены зеркально относительно перпендикуляра к оси пути по отношению к светоизлучателям и светоприемникам основного напольного комплекта, причем расстояние между первыми по ходу движения фотоэлементами основного и дополнительного комплектов не превышает длину теневой проекции хорды колеса по уровню сканирования на линию расположения светоприемных линеек, а расстояние между последними по ходу движения фотоэлементами основного и дополнительного комплектов не менее длины теневой проекции хорды колеса по уровню сканирования на линию расположения светоприемных линеек, и блок обработки выполнен в виде двух счетчиков разности затемненных фотоэлементов, полусумматора и синхронизатора, причем входы первого счетчика подключены соответственно к выходам левосторонних светоприемных линеек основного и дополнительного напольных комплектов, входы второго счетчика - соответственно к выходам правосторонних светоприемных линеек основного и дополнительного напольных комплектов, а выходы счетчиков - к счетным входам полусумматора, выход которого соединен с регистратором, а стробирующий вход - с
выходом синхронизатора, подключенного входами к выходам светоприемных линеек основного напольного комплекта.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАБЕГАНИЯ КОЛЕСА ГРУЗОВОГО ВАГОНА НА РЕЛЬС | 1994 |
|
RU2108251C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ТЕЛ ВРАЩЕНИЯ С ОТРАЖАЮЩЕЙ ПОВЕРХНОСТЬЮ | 1995 |
|
RU2109250C1 |
| US 5133521 A, 28.07.1992 | |||
| DE 3681575 A1, 04.01.1991 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВИДОВОЙ ПРИНАДЛЕЖНОСТИ МЯСА ДОМАШНИХ И ДИКИХ ПТИЦ | 2000 |
|
RU2178169C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ТЕЛ ВРАЩЕНИЯ С ОТРАЖАЮЩЕЙ ПОВЕРХНОСТЬЮ | 1995 |
|
RU2109250C1 |

