ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе формирования изображения транспортного средства, способу формирования изображения транспортного средства, устройству формирования изображения транспортного средства, программе и носителю записи.
УРОВЕНЬ ТЕХНИКИ
Обнаружение дорожного движения выполняется так, что водители, которые управляют отдельными транспортными средствами, администратор, который управляет работой транспортных средств, лицо, управляющее движением, и лицо, управляющее дорогами, понимают ситуацию с дорожным движением с помощью различных датчиков и выполняют действия, направленные на поддержание безопасной, спокойной и комфортной дорожной обстановки.
В качестве известной технологии в соответствующей области техники патентный документ 1 раскрывает систему, которая эффективно и точно обследует припаркованные транспортные средства с использованием движущегося транспортного средства для обследования. В частности, в системе принимаются данные для целевого объекта на дороге, который визуализируется посредством лазерного сканера, встроенного в измерительное транспортное средство, которое движется по дороге.
Вышеописанная система имеет блок извлечения данных боковой стороны, который извлекает данные о боковой стороне (поверхности) припаркованного транспортного средства, которое припарковано на дороге, на основании данных, представленных посредством лазерного сканера, и блок определения наличия/отсутствия припаркованного транспортного средства, который определяет наличие или отсутствие припаркованного транспортного средства на основании извлеченных данных о поверхности боковой стороны припаркованного транспортного средства.
ДОКУМЕНТ ИЗ УРОВНЯ ТЕХНИКИ
Патентный документ
Патентный документ 1: Публикация патента Японии №3740531.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача, решаемая изобретением
В системе управления дорожным движением внутреннее пространство каждого транспортного средства может визуализироваться снаружи транспортного средства для множества целей, таких как определение соблюдения правил движения или полосы движения в отношении числа пассажиров, управление посадкой пассажиров пассажирских транспортных средств, сканирование для розыска транспортного средства, вовлеченного в преступление, и определение относительно состояния соблюдения допустимого числа пассажиров. При формировании изображения состояние пассажирского сиденья и водительского сиденья может быть известно посредством формирования изображения через ветровое стекло спереди транспортного средства.
Однако при формировании изображения внутреннего пространства транспортного средства через ветровое стекло спереди транспортного средства состояние заднего сиденья не может быть точно известно, поскольку заднее сиденье может быть скрыто головой каждого из людей, которые сидят на водительском сиденье и пассажирском сиденье, подголовниками сидений или т.п.
Следовательно, оценивается, что состояние всего внутреннего пространства транспортного средства может быть известно с использованием системы, которая формирует изображение внутреннего пространства через окно сбоку транспортного средства.
Однако положение каждого окна транспортного средства изменяется в зависимости от модели, к которой транспортное средство принадлежит. Следовательно, чтобы реализовать такую систему, требуется точно обнаруживать окно целевого транспортного средства. Для выполнения такого требования технология, описанная в патентном документе 1, может определять присутствие или отсутствие транспортного средства, но не может обнаруживать окно транспортного средства.
Задача настоящего изобретения состоит в создании системы формирования изображения транспортного средства, способа формирования изображения транспортного средства, устройства формирования изображения транспортного средства, программы и носителя записи, которые решают вышеописанную проблему.
Средство решения задачи
Для решения вышеописанной проблемы система формирования изображения транспортного средства, предусматриваемая настоящим изобретением, имеет:
лазерный датчик перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен;
устройство обнаружения окна транспортного средства, которое обнаруживает окно транспортного средства на основании расстояния, измеренного посредством лазерного датчика перемещения, и
камеру, которая формирует изображение транспортного средства.
Устройство формирования изображения транспортного средства:
обнаруживает окно транспортного средства на основании изменения расстояния в горизонтальном направлении от лазерного датчика перемещения до точки отражения после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправляет пусковой сигнал для формирования изображения в камеру, когда обнаружено окно транспортного средства.
Настоящее изобретение также предусматривает способ формирования изображения транспортного средства с использованием лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен. Способ включает в себя:
обнаружение окна транспортного средства на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправку пускового сигнала для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
Настоящее изобретение также предусматривает устройство формирования изображения транспортного средства, которое обнаруживает окно транспортного средства с использованием лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен. Устройство:
обнаруживает окно транспортного средства на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправляет пусковой сигнал для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
Настоящее изобретение также предусматривает программу, которая побуждает компьютер выполнять функции:
обнаружения окна транспортного средства с использованием лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен, при этом окно транспортного средства обнаруживается на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправки пускового сигнала для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
Настоящее изобретение также предусматривает носитель записи, который хранит программу, которая побуждает компьютер выполнять функции:
обнаружения окна транспортного средства с использованием лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен, при этом окно транспортного средства обнаруживается на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправки пускового сигнала для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
Эффект изобретения
Как ясно понятно на основании вышеприведенного пояснения, в соответствии с настоящим изобретением, при обращении к данным изображения внутреннего пространства транспортного средства на проезжей части дороги, изображение которого было сформировано через стеклянное окно транспортного средства, представляется возможным точно узнавать состояние заднего сиденья транспортного средства на проезжей части дороги, невзирая на людей в транспортном средстве или состояние загрузки оборудования транспортного средства или т.п.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
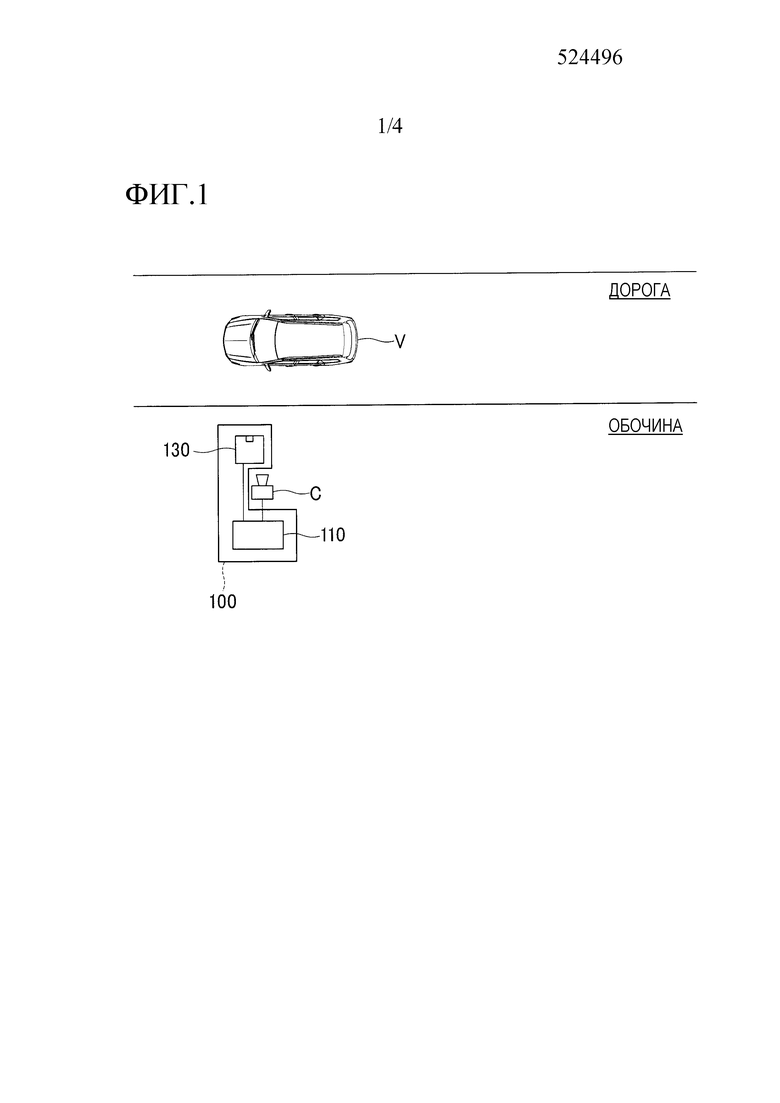
Фиг. 1 - это блок-схема, показывающая общую структуру системы обнаружения окна транспортного средства согласно варианту осуществления настоящего изобретения.
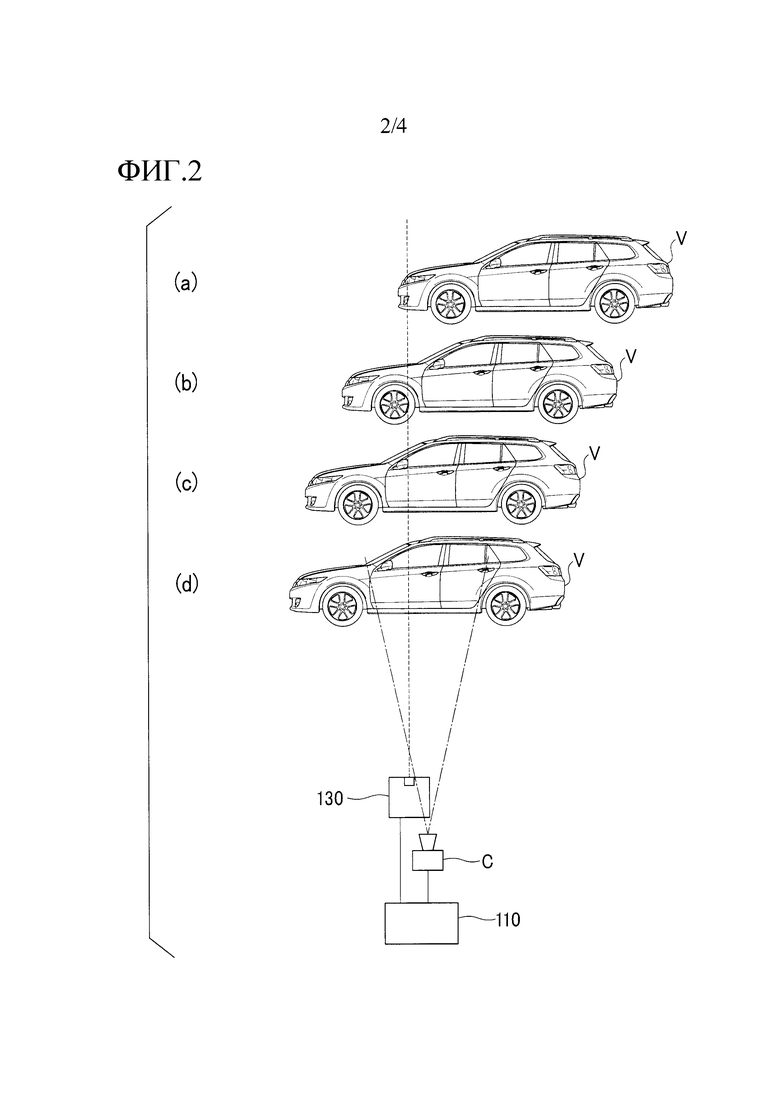
Фиг. 2 - это схема, используемая для пояснения операции формирования изображения системы обнаружения окна транспортного средства согласно варианту осуществления настоящего изобретения, когда транспортное средство въезжает в область формирования изображения.
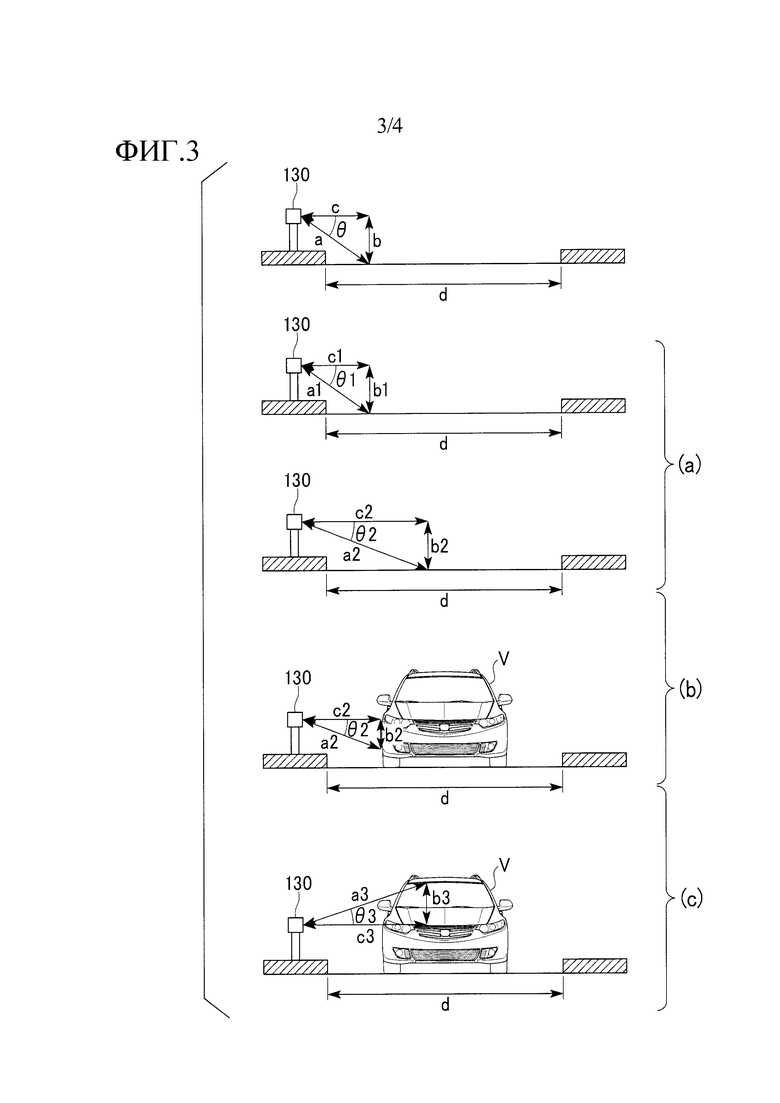
Фиг. 3 - это схема, используемая для пояснения операции обнаружения транспортного средства системой обнаружения окна транспортного средства, согласно варианту осуществления настоящего изобретения для отдельных случаев.
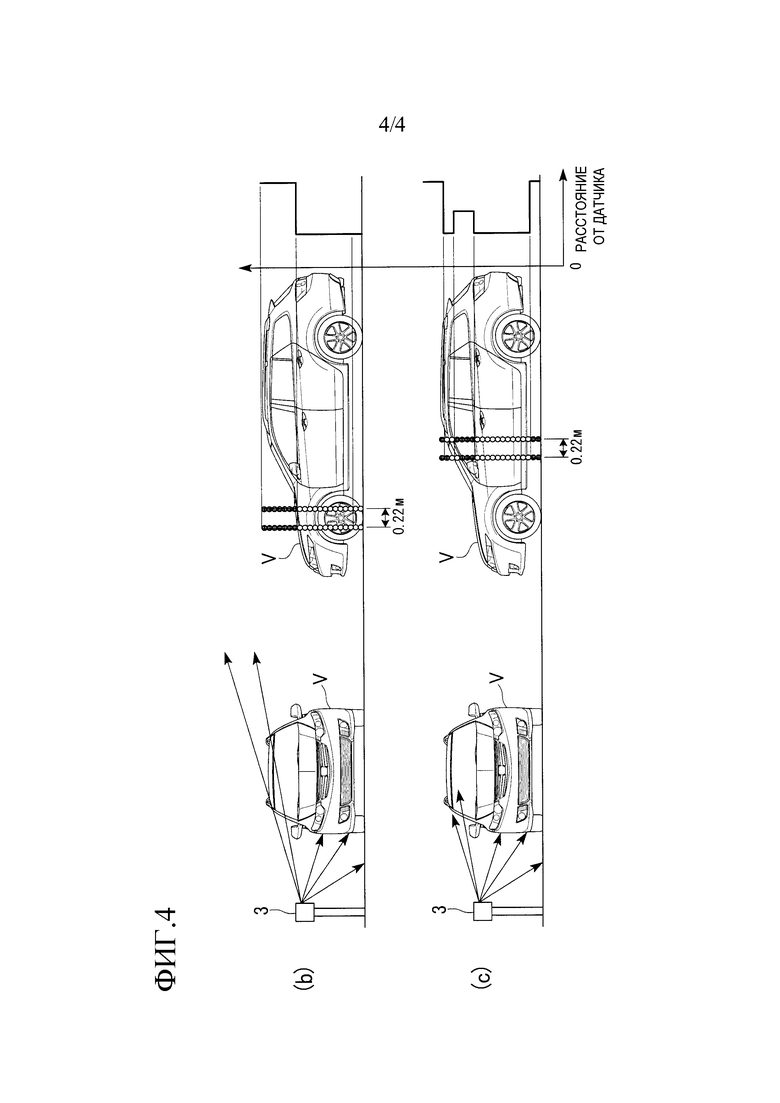
Фиг. 4 - это схема, используемая для пояснения отдельных случаев операции сканирования цели обнаружения лазерным датчиком 130 перемещения посредством лазерного луча.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже варианты осуществления системы формирования изображения транспортного средства, способа формирования изображения транспортного средства и устройства формирования изображения транспортного средства будут объяснены подробно с обращением к чертежам.
Фиг. 1 - это блок-схема, показывающая общую структуру системы 100 обнаружения окна транспортного средства согласно варианту осуществления настоящего изобретения. Система 100 обнаружения окна транспортного средства, показанная на Фиг. 1, имеет устройство 110 обнаружения окна транспортного средства и лазерный датчик 130 перемещения отражательного типа.
Лазерный датчик 130 перемещения расположен на обочине дороги и излучает лазерный луч из светоизлучающего элемента таким образом, что пространство проезжей части дороги сканируется лазером в вертикальном направлении. (Лазерный) луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, принимается светопринимающим элементом таким образом, чтобы измерять расстояние до точки отражения на объекте, в которой отражается лазер.
Устройство 110 обнаружения окна транспортного средства обнаруживает окно каждого транспортного средства на основании расстояния, измеренного посредством лазерного датчика перемещения.
Система может дополнительно включать в себя камеру C и инфракрасный излучатель (не показан).
Далее в данном документе будет объяснено общее функционирование системы 100 обнаружения окна транспортного средства согласно настоящему варианту осуществления.
Система 100 обнаружения окна транспортного средства настоящего варианта осуществления обнаруживает въезд транспортного средства V с помощью лазерного датчика 130 перемещения отражательного типа и обнаруживает положение стеклянного окна транспортного средства V с помощью свойства лазерного луча так, что луч проходит через стеклянное окно транспортного средства V.
В момент времени, когда положение стеклянного окна транспортного средства V было обнаружено, пусковой сигнал для формирования изображения выводится в камеру C. Следовательно, состояние внутреннего пространства транспортного средства V может легко визуализироваться через стеклянное окно транспортного средства V.
Фиг. 2 - это схема, используемая для пояснения операции формирования изображения системы 100 обнаружения окна транспортного средства, когда транспортное средство въезжает в область формирования изображения. Далее в данном документе, как показано на Фиг. 1, операция формирования изображения системы 100 обнаружения окна транспортного средства (для всего транспортного средства) будет объяснена с помощью Фиг. 2, в соответствии со статусом выполнения, как показано посредством этапов (a)-(d).
Сначала, на этапе (a), по принципу лазерного луча, излученного от лазерного датчика 130 перемещения, отражаемого обычным транспортным средством, устройство 110 обнаружения окна транспортного средства измеряет расстояние между лазерным датчиком 130 перемещения и транспортным средством V (на этом этапе транспортное средство V еще не было определено как транспортное средство).
Далее, на этапе (b), когда измеренное расстояние становится меньшим или равным пороговому значению, которое задано для настоящего устройства, устройство 110 обнаружения окна транспортного средства определяет, что транспортное средство V должно быть транспортным средством.
На следующем этапе (c) устройство 110 обнаружения окна транспортного средства обнаруживает возможное окно транспортного средства V.
Применяемый способ обнаружения основан на принципе того, что, когда окно транспортного средства V проходит перед лазерным датчиком 130 перемещения, расстояние между лазерным датчиком 130 перемещения и транспортным средством V, которое измерено посредством отражения лазерного луча, излученного из лазерного датчика 130 перемещения, имеет различные значения для оконной части и кузова транспортного средства для транспортного средства V.
На следующем этапе (d), для обнаруженного возможного окна транспортного средства V, устройство 110 обнаружения окна транспортного средства подтверждает, выполняется ли заданное условие определения.
Более конкретно, условием определения для процесса подтверждения является то, действительно или нет (i) положение окна как возможного окна в вертикальном направлении больше или равно заданному пороговому значению h1, а также меньше или равно другому заданному пороговому значению h2, и (ii) размер окна транспортного средства V в вертикальном направлении больше или равен ширине h3.
Кроме того, когда условие определения, описанное выше, сохранялось в течение заданного времени t1, устройство 110 обнаружения окна транспортного средства определяет соответствующее возможное окно транспортного средства V для фактического окна транспортного средства V.
Непосредственно после определения этого возможного окна транспортного средства V для окна транспортного средства V устройство 110 обнаружения окна транспортного средства отправляет пусковой сигнал для формирования изображения камере C. В это же время устройство 110 обнаружения окна транспортного средства выводит пусковой сигнал для излучения света в инфракрасный излучатель (не показан).
Фиг. 3 - это схема, используемая для пояснения операции обнаружения транспортного средства системы 100 обнаружения окна транспортного средства согласно варианту осуществления настоящего изобретения для отдельных случаев. Далее в данном документе с обращением к Фиг. 1 и 2 описана операция обнаружения транспортного средства системой 100 обнаружения окна транспортного средства в настоящем варианте осуществления при помощи Фиг. 3 для отдельных случаев (как показано обозначениями (a)-(c)).
Здесь, в измерении с помощью лазерного датчика 130 перемещения, с присвоенным обозначением «a», которое является измеренным значением расстояния от лазерного датчика 130 перемещения до кузова транспортного средства, высота до кузова транспортного средства, видимая из лазерного датчика 130 перемещения (т.е. вертикальное расстояние до кузова транспортного средства) равно b (b=a×sinθ). Кроме того, расстояние от лазерного датчика 130 перемещения до кузова транспортного средства (т.е. горизонтальное расстояние до кузова транспортного средства) равно c (c=a×cosθ).
В процессе измерения в каждом случае, объясняемом ниже, предполагается, что блок вычисления вертикального расстояния (не показан) устройства 110 обнаружения окна транспортного средства вычисляет вышеописанное вертикальное расстояние, и блок вычисления горизонтального расстояния (не показан) устройства 110 обнаружения окна транспортного средства вычисляет вышеупомянутое горизонтальное расстояние.
Также в процессе измерения каждого случая измерение с помощью лазерного датчика 130 перемещения повторяется несколько раз с равномерными временными интервалами.
Сначала, в случае (a), когда транспортного средства нет на дороге, лазерный датчик 130 перемещения измеряет отражение от поверхности дороги, и, таким образом, «измеренное значение b1 для первого времени» = «измеренное значение b2 для второго времени» (не имеется изменение в измеренном значении).
Далее, в случае (b), когда транспортное средство въехало, лазерный луч от лазерного датчика 130 перемещения отражается кузовом транспортного средства, и, таким образом, «измеренное значение b1 для первого времени» > «измеренное значение b2 после въезда». Т.е. измеренное значение высоты до кузова транспортного средства, видимое из лазерного датчика 130 перемещения, изменилось, так что устройство 110 обнаружения окна транспортного средства определяет, что в этом случае въехало транспортное средство.
Если вышеупомянутое состояние продолжается, устройство 110 обнаружения окна транспортного средства определяет, что сейчас проезжает транспортное средство, и измеряет измеренное значение c3 в горизонтальном направлении.
Далее в данном документе, в случае (c), когда проходит оконное стекло транспортного средства, измеренное значение c3 > «измеренное значение c2 (в горизонтальном направлении) в случае (b)».
Если такое состояние продолжается, устройство 110 обнаружения окна транспортного средства определяет, что обнаружено окно транспортного средства, и выводит пусковой сигнал для формирования изображения в камеру C.
Фиг. 4 - это схема, используемая для пояснения операции (для каждого случая) сканирования цели обнаружения лазерным датчиком 130 перемещения посредством лазерного луча. Далее в данном документе, с обращением на Фиг. 1-3, операция сканирования транспортного средства (в качестве цели обнаружения) лазерным датчиком 130 перемещения с помощью лазерного луча будет объяснена с помощью Фиг. 4, для отдельных случаев (как указано обозначениями «(b)» и «(c)» на чертежах).
На чертежах, если предполагается, что период сканирования лазерного датчика 130 перемещения равен 20 мс, а входная скорость транспортного средства равна 40 км/ч, тогда интервал сканирования (т.е. длина для каждого сканирования) приблизительно равен 0,22 м.
Сначала в случае (b), в котором проезжает фрагмент (транспортного средства), который не включает в себя окно, не имеет место временное изменение расстояния от лазерного датчика 130 перемещения до кузова транспортного средства, и таким образом сохраняется по существу постоянное значение.
Далее, в случае (c), в котором проезжает фрагмент (транспортного средства), который включает в себя окно, имеет место временное изменение в расстоянии от лазерного датчика 130 перемещения до кузова транспортного средства, поскольку проезжает фрагмент окна транспортного средства.
В способе формирования изображения транспортного средства настоящего изобретения, в конфигурации системы 100 обнаружения окна транспортного средства, описанной выше, устройство 110 обнаружения окна транспортного средства и лазерный датчик 130 перемещения исследуют каждое транспортное средство на проезжей части дороги на основании результатов измерения с помощью лазерного луча. Кроме того, устройство 110 обнаружения окна транспортного средства определяет положение оконного стекла транспортного средства на основании изменения в вышеописанных результатах измерения за прошедшее время.
Согласно такому определению устройство 110 обнаружения окна транспортного средства может отправлять камере C команду на формирование изображения внутреннего пространства транспортного средства через соответствующее стеклянное окно, так что состояние внутреннего пространства транспортного средства может легко визуализироваться. Вышеописанные результаты измерений включают в себя горизонтальное расстояние и вертикальное расстояние между лазерным датчиком 130 перемещения и транспортным средством.
Кроме того, в структуре системы 100 обнаружения окна транспортного средства, описанной выше, устройство формирования изображения транспортного средства настоящего изобретения обнаруживает положение стеклянного окна транспортного средства на проезжей части дороги на основании изменения в горизонтальном расстоянии между лазерным датчиком 130 перемещения и транспортным средством за прошедшее время.
Кроме того, в устройстве 110 обнаружения окна транспортного средства компьютерная программа настоящего изобретения выполняет вышеописанный способ и управляет вышеописанным способом обнаружения для обнаружения стеклянного окна транспортного средства на проезжей части дороги на основании изменения в горизонтальном расстоянии между лазерным датчиком 130 перемещения и транспортным средством на всем протяжении прошедшего времени.
Носитель записи настоящего изобретения является носителем записи, который хранит вышеописанную компьютерную программу.
Согласно системе 100 обнаружения окна транспортного средства в варианте осуществления настоящего изобретения внутреннее пространство транспортного средства может визуализироваться через стеклянное окно в точно определенный момент, в который фрагмент стеклянного окна транспортного средства на проезжей части дороги присутствует в положении, наиболее подходящем для формирования изображения. Кроме того, устройство имеет простую структуру и может быть легко установлено. Следовательно, система 100 определения окна транспортного средства согласно варианту осуществления настоящего изобретения может быть предпочтительно применена к наблюдению внутреннего пространства каждого транспортного средства на дороге.
Система 100 обнаружения окна транспортного средства согласно варианту осуществления настоящего изобретения также предпочтительно применяется и может проявлять особый эффект в сканировании для розыска транспортного средства, вовлеченного в преступление, определении состояния соблюдения допустимого числа пассажиров, определении соблюдения правил движения или полосы движения в отношении числа пассажиров, управлении въездом пассажиров въезжающих транспортных средств, и так далее.
В системе в качестве другого варианта осуществления настоящего изобретения устройство 110 обнаружения окна транспортного средства системы 100 обнаружения окна транспортного средства имеет дополнительную функцию определения формы транспортного средства на основании информации, полученной от лазерного датчика 130 перемещения.
Испрашивается приоритет на основании заявки на патент Японии №2012-231675, поданной 19 октября 2012 г., все содержимое которой включено в данный документ путем ссылки.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Согласно настоящему изобретению, при обращении к данным изображения внутреннего пространства транспортного средства на проезжей части дороги, которое было визуализировано через стеклянное окно транспортного средства, представляется возможным точно узнавать состояние заднего сиденья транспортного средства на проезжей части дороги, невзирая на людей в транспортном средстве или состояние загрузки оборудования транспортного средства или т.п.
Перечень ссылочных позиций
100 система обнаружения окна транспортного средства
110 устройство обнаружения окна транспортного средства
130 лазерный датчик перемещения
C камера
V транспортное средство.
Изобретение относится к системам фиксации информации. Система формирования изображения транспортного средства содержит лазерный датчик перемещения, устройство обнаружения окна транспортного средства и камеру. Лазерный датчик перемещения, расположенный на обочине проезжей части дороги, сканирует пространство проезжей части дороги в его вертикальном направлении и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен. Камера формирует изображение транспортного средства. Устройство обнаружения окна транспортного средства обнаруживает окно транспортного средства на основании изменения расстояния в горизонтальном направлении от лазерного датчика перемещения до точки отражения после того, как было обнаружено транспортное средство в пространстве проезжей части дороги, и отправляет пусковой сигнал для формирования изображения в камеру, когда обнаружено окно транспортного средства. Достигается повышение достоверности фиксации информации. 4 н. и 9 з.п. ф-лы, 4 ил.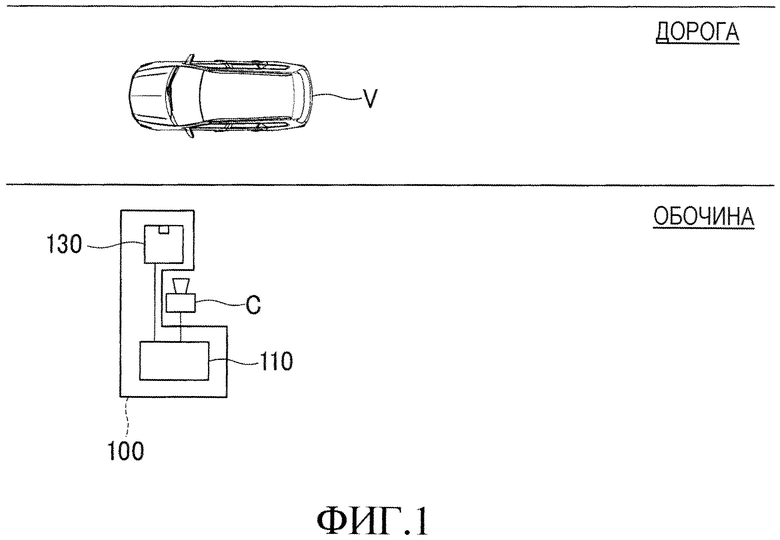
1. Система формирования изображения транспортного средства, содержащая:
лазерный датчик перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен;
устройство обнаружения окна транспортного средства, которое обнаруживает окно транспортного средства на основании расстояния, измеренного лазерным датчиком перемещения, и
камеру, которая формирует изображение транспортного средства;
при этом устройство обнаружения окна транспортного средства:
обнаруживает окно транспортного средства на основании изменения расстояния в горизонтальном направлении от лазерного датчика перемещения до точки отражения после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправляет пусковой сигнал для формирования изображения в камеру, когда обнаружено окно транспортного средства.
2. Система формирования изображения транспортного средства по п. 1, в которой, если расстояние в горизонтальном направлении от лазерного датчика перемещения до точки отражения увеличилось после того, как было обнаружено транспортное средство в пространстве проезжей части дороги, то устройство обнаружения окна транспортного средства определяет, что обнаружено окно транспортного средства.
3. Система формирования изображения транспортного средства по п. 1, в которой устройство обнаружения окна транспортного средства:
вычисляет расстояние в горизонтальном направлении от лазерного датчика перемещения до точки отражения на основании расстояния, измеренного лазерным датчиком перемещения; и
обнаруживает окно транспортного средства на основании изменения в вычисленном расстоянии.
4. Система формирования изображения транспортного средства по п. 1, в которой устройство обнаружения окна транспортного средства обнаруживает транспортное средство в пространстве проезжей части дороги на основании изменения расстояния в вертикальном направлении от лазерного датчика перемещения до точки отражения и затем обнаруживает окно транспортного средства.
5. Система формирования изображения транспортного средства по п. 4, в которой, если расстояние в вертикальном направлении от лазерного датчика перемещения до точки отражения стало меньше, чем высота лазерного датчика перемещения, измеренная от поверхности проезжей части дороги, то устройство обнаружения окна транспортного средства определяет, что обнаружено окно транспортного средства.
6. Система формирования изображения транспортного средства по п. 4, в которой устройство обнаружения окна транспортного средства:
вычисляет расстояние в вертикальном направлении от лазерного датчика перемещения до точки отражения на основании расстояния, измеренного лазерным датчиком перемещения; и
обнаруживает транспортное средство в пространстве проезжей части дороги на основании изменения в вычисленном расстоянии.
7. Способ формирования изображения транспортного средства с использованием лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен, при этом:
способ включает в себя этапы, на которых:
обнаруживают окно транспортного средства на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправляют пусковой сигнал для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
8. Устройство формирования изображения транспортного средства, которое обнаруживает окно транспортного средства с помощью лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен, при этом:
устройство:
обнаруживает окно транспортного средства на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправляет пусковой сигнал для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
9. Компьютер с функцией формирования изображения транспортного средства, содержащий носитель записи, который хранит программу, которая при выполнении компьютером побуждает компьютер выполнять способ формирования изображения транспортного средства, при этом программа побуждает компьютер выполнять функции:
обнаружения окна транспортного средства с помощью лазерного датчика перемещения, который предусмотрен на обочине проезжей части дороги, излучает лазерный луч, который сканирует пространство проезжей части дороги в его вертикальном направлении, принимает луч, отраженный объектом, который присутствует в пространстве проезжей части дороги, и измеряет расстояние до точки отражения на объекте, в которой лазерный луч был отражен, при этом окно транспортного средства обнаруживается на основании изменения расстояния от положения лазерного датчика перемещения в горизонтальном направлении до положения точки отражения в горизонтальном направлении после того, как было обнаружено транспортное средство в пространстве проезжей части дороги; и
отправки пускового сигнала для формирования изображения в камеру, которая формирует изображение транспортного средства, когда обнаружено окно транспортного средства.
10. Система формирования изображения транспортного средства по п. 1, в которой, когда обнаружено окно транспортного средства, в камеру отправляется пусковой сигнал для формирования изображения внутреннего пространства транспортного средства.
11. Способ формирования изображения транспортного средства по п. 7, в котором, когда обнаружено окно транспортного средства, в камеру отправляют пусковой сигнал для формирования изображения внутреннего пространства транспортного средства.
12. Устройство формирования изображения транспортного средства по п. 8, в котором, когда обнаружено окно транспортного средства, в камеру отправляется пусковой сигнал для формирования изображения внутреннего пространства транспортного средства.
13. Компьютер по п. 9, в котором, когда обнаружено окно транспортного средства, в камеру отправляется пусковой сигнал для формирования изображения внутреннего пространства транспортного средства.
| JP 2011133989 A, 07.07.2011 | |||
| JP 2003203291 A, 18.07.2003 | |||
| RU 2009140318 A, 10.05.2011. |

