Настоящее изобретение относится к устройству и способу распознавания шины транспортного средства для определения, посредством оптического датчика, одинарная или сдвоенная шина установлена на оси.
Информация о шинах транспортного средства особенно необходима в электронных системах взимания дорожных сборов, поскольку количество осей и тип исполнения шин оказывают непосредственное влияние на допустимый общий вес транспортного средства и, следовательно, размер дорожного сбора. Для распознавания транспортного средства и его осей существуют различные системы, определяющие транспортное средство и оси с помощью индуктивных петель, пьезодатчиков или оптически посредством лазерного сканера или камеры.
Кроме того, для таких систем взимания дорожных сборов также важно, является ли шина одинарной или сдвоенной. В настоящее время на рынке нет продуктов или систем, которые могли бы оптически распознать сдвоенную шину. Из DE 42 01 523 A1 известно устройство похожего типа, в котором протектор шины распознается с помощью камеры методом светового сечения, и по искажению световой линии распознается продольный профиль и, следовательно, шина.
Однако при движении транспорта такое распознавание протектора осуществить очень сложно, так как, например, имеется лишь небольшое пространство для свободного обзора протектора, а на многополосных дорогах возможно затенение от других транспортных средств.
Исходя из известного уровня техники, задачей изобретения является создание усовершенствованного устройства, позволяющее надежным образом распознавать шину.
Что касается устройства, данная задача решается с помощью устройства, имеющего признаки пункта 1 формулы изобретения.
Согласно изобретению устройство распознавания шины транспортного средства для определения, одинарная или сдвоенная шина установлена на оси, имеет оптический датчик, распознающий по меньшей мере одну область обода, на котором смонтирована подлежащая идентификации шина, кроме того, предусмотрен блок оценки, выполненный с возможностью определения формы указанной области обода по сигналам датчика и генерации сигнала, отображающего тип шины, в зависимости от формы.
Таким образом, в основе настоящего изобретения лежит соображение о корреляции формы шины и обода, и что форму обода, или точнее форму области обода, легко определить, расположив сбоку снаружи оптический датчик, и уже по определенной форме сделать вывод, является ли шина одинарной или сдвоенной.
Этим обеспечены значительные преимущества, заключающиеся в том, что для распознавания шины не требуется устанавливать отдельные датчики (например, петли или пьезодатчики) в поверхности дороги, а свободный обзор датчиком обода без затенений реализовать намного проще, чем обзор протектора шины.
Особым преимуществом является то, что для осуществления изобретения могут быть использованы уже существующие лазерные сканеры в известных системах классификации транспортных средств, применяемых в настоящее время в системах взимания дорожного сбора. Требуется лишь обеспечить обзор ободьев лазерным сканером. Таким образом, лазерный сканер выполняет две функции: во-первых, обнаружение транспортного средства (распознавание профиля), во-вторых, определение шины путем распознавания обода.
Для этого будет преимуществом, если плоскость сканирования лазерного сканера ориентирована не по горизонтали, а скорее по вертикали.
Согласно варианту осуществления изобретения блок оценки также может выполнять обе функции, т.е. не только распознавание шины согласно изобретению, но и классификацию транспортного средства.
Кроме того, блок оценки также может быть выполнен с возможностью определения количества осей транспортного средства.
В альтернативном варианте осуществления датчик может быть выполнен в виде 2D- или 3D-камеры. В случае 2D-камеры форма обода определяется по двумерному изображению с помощью интеллектуального анализа изображения. В настоящее время такая оценка может быть выполнена очень хорошо с помощью так называемой технологии глубокого обучения. Более непосредственное определение формы обода возможно с помощью 3D-камеры, с помощью которой можно получить непосредственно форму обода на основании полученных данных о расстоянии. Разумеется, необходим обзор камерой обода без затенений.
Что касается способа, указанная выше задача решается с помощью способа распознавания шины транспортного средства для определения, установлена ли на оси одинарная или сдвоенная шина, включающего в себя этапы, на которых:
- обеспечивают наличие оптического датчика;
- распознают посредством датчика по меньшей мере одну область обода колеса, на котором смонтирована подлежащая идентификации шина, и создают соответствующие данные датчика;
- определяют форму области обода колеса по данным датчика;
- определяют шину по форме обода колеса;
- выводят сигнал, указывающий, что установлена одинарная или сдвоенная шина.
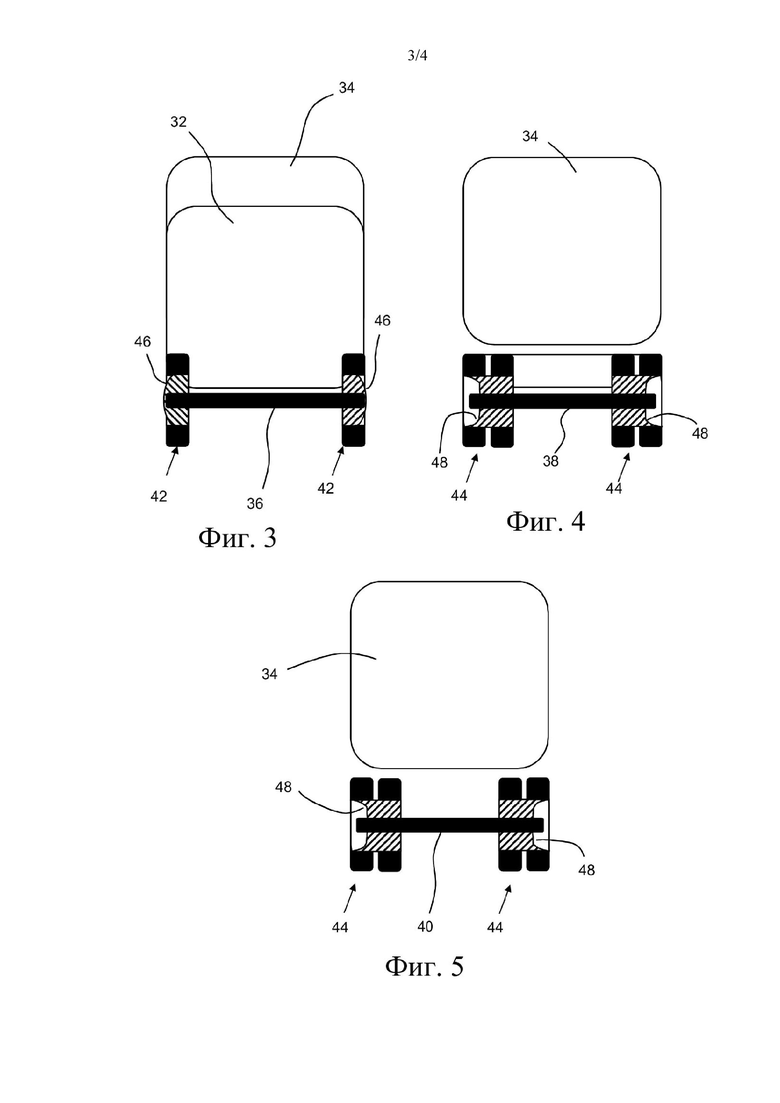
Как правило, если обод имеет область, изогнутую наружу, это указывает на одинарную шину, если же обод имеет область, изогнутую внутрь, это указывает на сдвоенную шину, так что для вывода сигнала, соответствующего шине, предпочтительно нужно лишь грубо распознать форму обода или распознать форму обода лишь в определенных радиальных областях.
Настоящее изобретение объясняется более подробно ниже с помощью одного из примеров его осуществления, данного со ссылками на чертежи. На чертежах показано следующее:
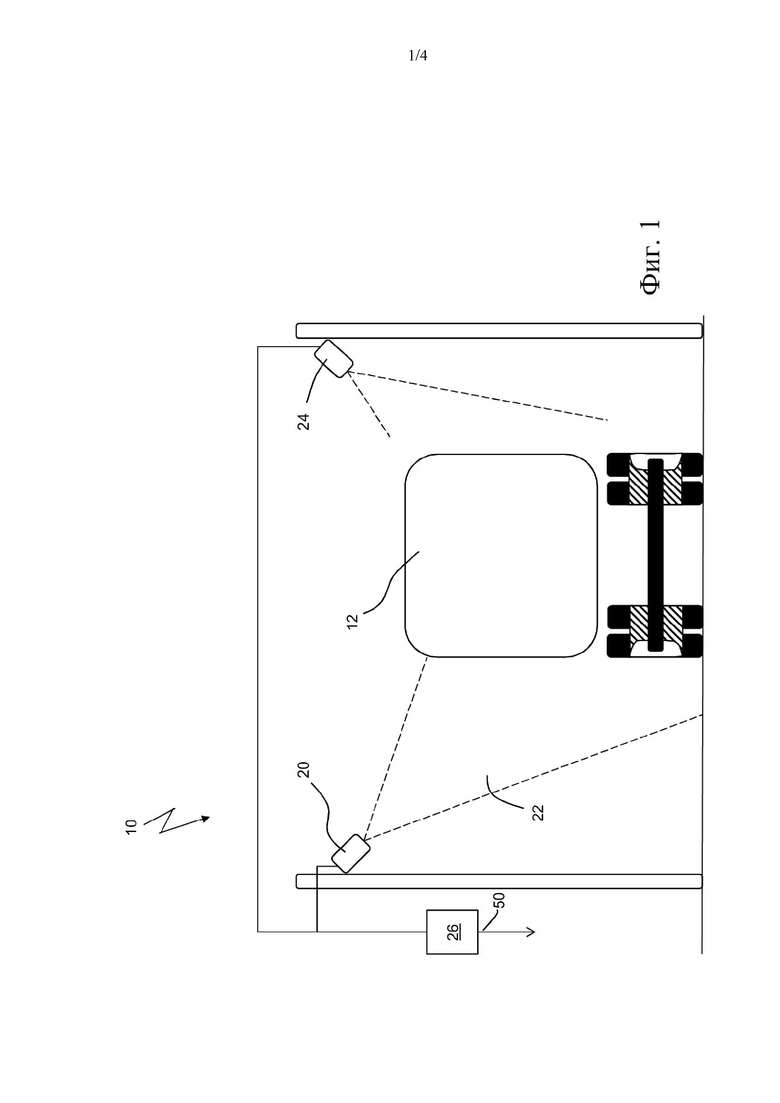
на фиг. 1 показано устройство согласно изобретению вместе с транспортным средством;
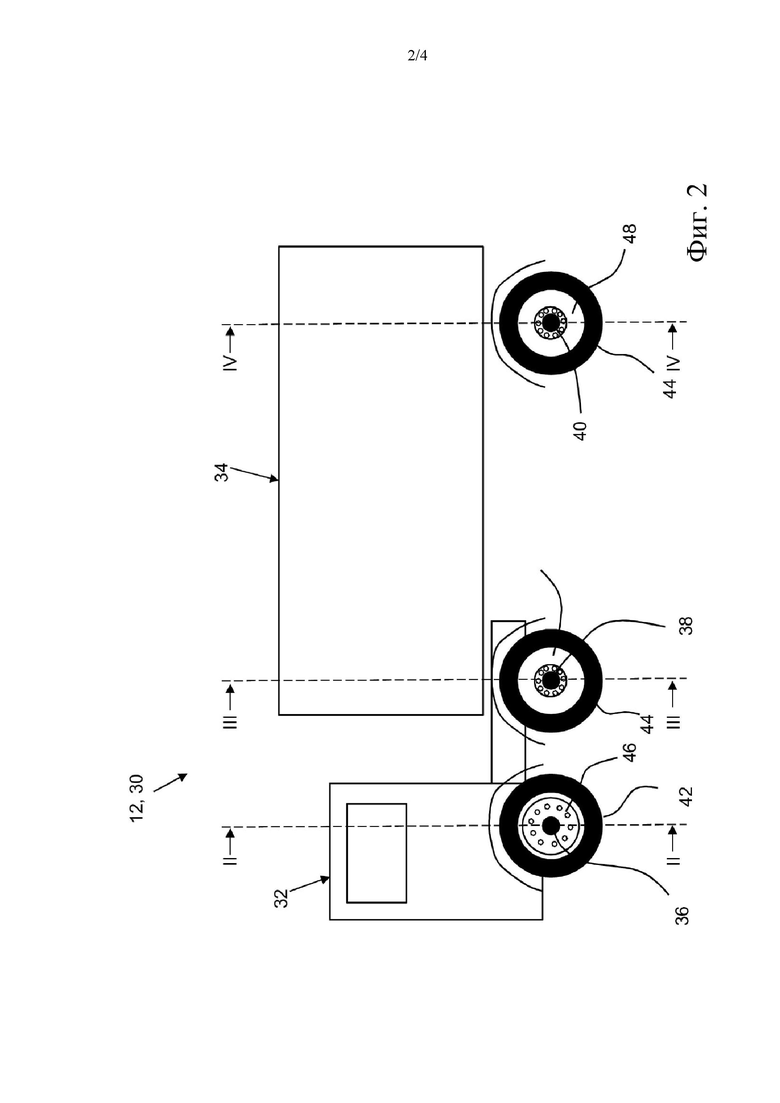
на фиг. 2 показан схематичный вид сбоку транспортного средства с тремя осями и одинарными и сдвоенными шинами;
на фиг. 3-5 показаны виды в поперечном разрезе на уровне осей транспортного средства с фиг. 2.
Устройство 10 распознавания шины транспортного средства 12 согласно настоящему изобретению для определения, одинарная или сдвоенная шина установлена на оси, содержит оптический датчик 20. Датчик 20 может быть выполнен в виде лазерного сканера или предпочтительно в виде камеры. Если датчик 20 выполнен в виде лазерного сканера, он устанавливается на краю проезжей части так, что его плоскость 22 сканирования проходит по существу вертикально и, таким образом, оптически распознает, по меньшей мере сбоку, проезжающее мимо транспортное средство 12. Лазерный сканер 20 циклически принимает профили расстояния, так что, когда мимо проезжает транспортное средство, профиль транспортного средства можно составить путем соединения отдельных сканов. Если датчик 20 выполнен в виде камеры, он делает снимки транспортного средства 12 в своем поле 22 зрения. Как правило, съемка изображений запускается с помощью другого не показанного датчика, который распознает присутствие транспортного средства 12. Также возможны комбинации лазерных сканеров и камер, так как на измерительных станциях с фиг. 1 и 6 должны выполняться различные задачи. Данные задачи включают в себя классификацию транспортных средств, распознавание номерного знака, подсчет осей и тому подобное.
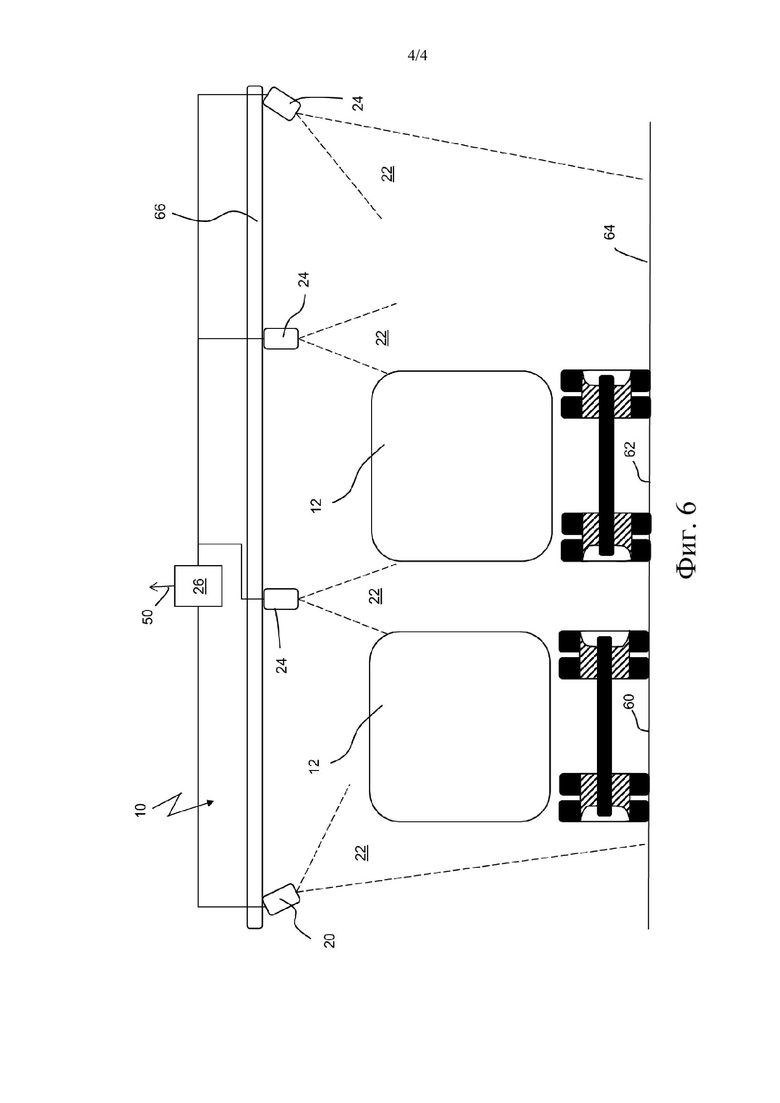
В варианте осуществления с фиг. 1 транспортное средство 12 распознается также с другой стороны посредством еще одного датчика 24, так что для классификации транспортного средства может быть составлен полный профиль транспортного средства. Распознавание с двух сторон также важно для многополосных дорог (см. фиг. 6), так как при большем количестве полос движения транспортные средства 12 часто движутся рядом друг с другом, и в боковой проекции одно транспортное средство может закрывать другое. Поэтому на многополосных дорогах наиболее целесообразно устанавливать датчики 20, 24 над проезжей частью и выше транспортных средств, так что транспортные средства на каждой полосе движения могут быть распознаны по возможности с обеих сторон, как показано на фиг. 6, на которой изображена проезжая часть с тремя полосами 60, 62, 64 движения. На данном чертеже датчики 20, 24 закреплены на поперечной балке 66 так, что поле 22 зрения каждого датчика позволяет распознать сбоку транспортное средство 12, находящееся на полосе движения. Кроме того, монтажное положение 24, как показано в качестве примере с фиг. 6, не обязательно должно находится посередине между полосами движения. Кроме того, датчики 24 между полосами 60, 62, 64 движения (см. фиг. 6) не обязательно должны быть одновременно связаны с двумя полосами движения. Для каждой полосы движения также может быть предусмотрено два датчика, по одному датчику для каждой стороны транспортного средства. Все это является вопросом наиболее подходящей топологии и зависит от нескольких параметров, например, от высоты поперечной балки, ширины полос движения и, следовательно, расстояния между соседними транспортными средствами.
Кроме того, для решения указанных выше задач устройство 10 согласно изобретению содержит блок 26 оценки, обрабатывающий данные датчика, полученные от датчика 20 или, соответственно, от датчиков 20 и 24.
Сущность изобретения, а именно идентификация шины, будет пояснена со ссылкой на транспортное средство 12, показанное на виде сбоку с фиг. 2 и в поперечном разрезе с фиг. 3-5. Показанное транспортное средство 12 представляет собой грузовой автомобиль 30, состоящий из тягача 32 и полуприцепа 34. Тягач 32 имеет две оси 36, 38, а полуприцеп имеет одну ось 40. Колеса 42 на первой оси 36 имеют одинарные шины, как показано на поперечном разрезе с фиг. 3. Колеса 44 на второй оси 38 и на третьей оси 40 имеют сдвоенные шины, как показано на поперечном разрезе с фиг. 4 и 5. Обод колеса имеет характерную форму, зависящую от шин. Ободья 46 колес 42 первой оси по меньшей мере в некоторых областях изогнуты наружу (фиг. 3), а ободья 48 колес 44 других осей 38, 40 изогнуты внутрь (фиг. 4 и 5). Это типичные характерные черты одинарных и сдвоенных шин.
В поле 22 зрения датчика 20 или, соответственно, 24 в определенный момент времени находится по меньшей мере вышеуказанная изогнутая область обода. Если датчик 20 выполнен в виде лазерного сканера или 3D-камеры, он считывает профиль расстояний проезжающего мимо грузового автомобиля 12, т.е. передает свои данные в блок 26 оценки, в котором по отдельным профилям расстояний составляется боковой профиль, в том числе форма ободьев 46 и 48. По форме ободьев 46 и 48 блок 26 оценки может сделать заключение о типе шины, например, путем сравнения с известными формами. Если шина определена таким образом, на выходе 50 генерируется и выводится сигнал, отображающий тип шины.
Если датчик 20 выполнен в виде 2D-камеры, датчик считывает изображение транспортного средства 12. Затем путем соответствующей обработки изображений, например, технологиями глубокого обучения, указанное изображение может быть оценено в отношении формы обода или, соответственно, шины. В этом смысле формулировка из п. 1 формулы изобретения, что по сигналам датчиков определяется форма области 46, 48 обода, и в зависимости от определенной формы генерируется сигнал, отображающий тип шины, также означает такую оценку изображения с помощью глубокого обучения.
Если количество встречающихся форм ободьев ограничено, то данные формы могут быть, например, сохранены в качестве эталонов в памяти блока оценки, так что путем сравнения измеренной формы обода с указанными эталонами может быть точно определен обод и, следовательно, шина. Однако это возможно только в том случае, если обод может быть измерен в достаточной степени, что возможно лишь при достаточной видимости обода. Как описано выше, в принципе достаточным является получение данных о том, как изогнут обод в определенных областях - внутрь или наружу.
Путем определения полного профиля транспортного средства с помощью устройства 10 согласно изобретению с блоком 26 оценки также может быть осуществлена классификация транспортного средства. Разумеется, таким же образом можно определить количество осей транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486597C1 |
| УСТРОЙСТВО ЛОКАЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2706763C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНФОРМАЦИЕЙ О ПОЛОСАХ ДВИЖЕНИЯ, СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ИНФОРМАЦИЕЙ О ПОЛОСАХ ДВИЖЕНИЯ | 2017 |
|
RU2742213C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ДОРОГИ, ФОРМЫ И ПОЛОЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ НА ДОРОГЕ, И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2571871C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2788556C1 |
| Устройство считывания сигнала светофора | 2021 |
|
RU2768694C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2622616C1 |
| Система определения геометрических параметров трехмерных объектов | 2017 |
|
RU2650857C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373325C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
Изобретение относится к устройству и способу распознавания шины транспортного средства для определения, одинарная или сдвоенная шина установлена на оси. Техническим результатом является повышение надежности распознавания, одинарная или сдвоенная шина установлена на оси транспортного средства. Для этого устройство имеет оптический датчик, распознающий по меньшей мере одну область обода, на котором смонтированы подлежащая идентификации шина. Кроме того, предусмотрен блок оценки, выполненный с возможностью определения формы области обода по сигналам датчика и генерации сигнала, отображающего тип шины, в зависимости от указанной формы. 2 н. и 8 з.п. ф-лы, 6 ил.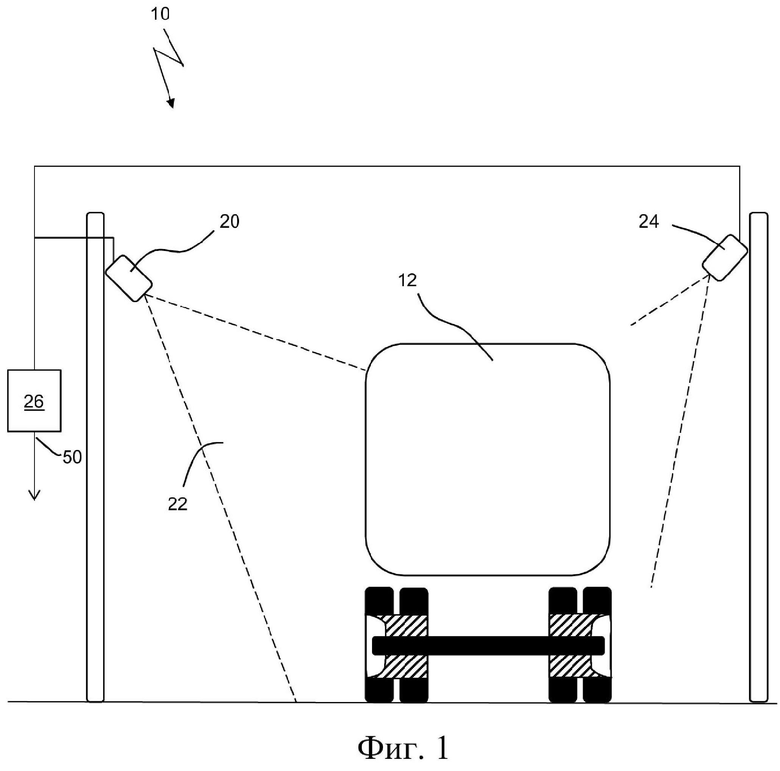
1. Устройство распознавания шины транспортного средства (12) для определения, посредством оптического датчика (20, 24), одинарная или сдвоенная шина установлена на оси (36, 38, 40), отличающееся тем, что датчик (20, 24) выполнен с возможностью распознавания по меньшей мере одной области обода (46, 48), на котором смонтирована подлежащая идентификации шина, и тем, что предусмотрен блок (26) оценки, выполненный с возможностью определения формы области обода (46, 48) по сигналам датчика и генерации сигнала, отображающего тип шины, в зависимости от указанной определенной формы.
2. Устройство по п.1, отличающееся тем, что датчик выполнен в виде лазерного сканера для измерения расстояния.
3. Устройство по п.2, отличающееся тем, что плоскость сканирования лазерного сканера ориентирована не горизонтально.
4. Устройство по любому из пп.1-3, отличающееся тем, что датчик выполнен с возможностью распознавания не только обода, но и транспортного средства.
5. Устройство по любому из пп.1-4, отличающееся тем, что блок оценки выполнен с возможностью классификации транспортных средств.
6. Устройство по любому из пп.1-5, отличающееся тем, что блок оценки выполнен с возможностью определения количества осей транспортного средства.
7. Устройство по п.1, отличающееся тем, что датчик выполнен в виде 2D- или 3D-камеры.
8. Способ распознавания шины транспортного средства для определения, одинарная или сдвоенная шина установлена на оси, включающий в себя этапы, на которых:
- обеспечивают наличие оптического датчика;
- распознают посредством датчика по меньшей мере одну область обода, на котором смонтирована подлежащая идентификации шина, и создают соответствующие данные датчика;
- определяют форму по меньшей мере одной области обода по данным датчика;
- определяют шину по форме области обода;
- выводят сигнал, указывающий, что установлена одинарная или сдвоенная шина.
9. Способ по п.8, в котором, если обод имеет область, изогнутую наружу, выдают сигнал, указывающий на одинарную шину, а если обод имеет область, изогнутую внутрь, выдают сигнал, указывающий на сдвоенную шину.
10. Способ по п.8, отличающийся тем, что определение шины по форме области обода выполняют путем сравнения с сохраненными эталонными формами ободьев.
| EP 3193276 B1, 06.06.2018 | |||
| DE 102006042309 A1, 27.03.2008 | |||
| DE 102010002258 A1, 25.08.2011 | |||
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ РАСПОЛОЖЕНИЯ ШИН ТРАНСПОРТНОГО СРЕДСТВА СО СДВОЕННЫМИ ЗАДНИМИ ШИНАМИ | 2011 |
|
RU2567130C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ШИПОВАННЫХ ШИН НА АВТОМОБИЛЕ | 2013 |
|
RU2545141C1 |

