Предлагаемое изобретение относится к области измерения и может быть использовано для настройки и калибровки акселерометров и приборов, содержащих акселерометры.
Известен способ определения параметров прецизионных акселерометров, в частности погрешности базовых установочных элементов и угловой деформации основания в плоскости, перпендикулярной оси его вращения, описанный в [1], включающий развороты акселерометра, закрепленного на вертикальном основании, вокруг горизонтальной оси и вокруг измерительной оси на некоторые, заранее заданные углы с одновременным наблюдением выходного сигнала.
Однако для реализации данного способа необходимо осуществлять вращение вокруг измерительной оси акселерометра, что не всегда возможно легко реализовать, т.к. требуется сложное оборудование.
Известен способ определения угловых координат измерительной оси акселерометра - прототип, описание которого приведено в [2]. Сущность данного способа заключается в том, что проводят два разворота акселерометра вокруг первой и второй горизонтальной оси на углы, при которых сигнал акселерометра равен нулю, и после этого, зная углы между осями вращения и осями ортогонального базиса и углы разворотов, вычисляют координаты измерительной оси акселерометра.
Однако способ требует проведения вращения до получения нулевого сигнала с акселерометра. При развороте акселерометра требуется проводить несколько последовательных поворотов (приближений) и замеров сигнала с акселерометра для того, чтобы определить момент нулевого сигнала, что требует больших затрат времени.
Задача изобретения - упрощение способа и увеличение экономичности.
Эта задача достигается тем, что в способе определения угловых координат α, β, γ измерительной оси акселерометра относительно ортогонального базиса X, Y, Z, включающем первый и второй развороты вокруг горизонтальной оси, расположенной в плоскости горизонта XOY, при этом первый разворот акселерометра из начального положения вокруг первой оси OA1, расположенной под углом ϕ1 к оси Х базиса, проводят на угол λP1, после чего из начального положения производят второй разворот акселерометра вокруг второй оси ОА2, расположенной в плоскости XOY под углом ϕ2 к оси X, на угол λP2, дополнительно измеряют сигналы акселерометра U1 в исходном положении, U2 после первого и U3 после второго разворотов на углы λP1 и λP2, а угловые координаты α, β и γ определяют из соотношений:
U2/U1=Sin(λ1-λP1)/Sinλ1
U3/U1=Sin(λ2-λP2)/Sinλ2
Cos2α+ Cos2β+Cos2γ=1
Sin2λ1=Cos2γ:[1-(Cosϕ1×Cosα+Cosβ×Sinϕ1)2]
Sin2λ2=Cos2γ:[1-(Cosϕ2×Cosα+Cosβ×Sinϕ2)2]
при этом величину углов λP1 и λP2 выбирают из соотношений:
Sin2λP1=Cos2γP:[1-(Cosϕ1×CosαP+CosβP×Sinϕ1)2]
Sin2λP2=Cos2γP:[1-(Cosϕ2×CosαP+CosβP×Sinϕ2)2]
где αP∈[α0-Δα, α0+Δα], βP∈[β0-Δβ, β0+Δβ], γР∈[γ0-Δγ, γ0+Δγ], а α0, β0, γ0 - заданные угловые координаты измерительной оси, Δα, Δβ, Δγ - максимально возможная погрешность фактического расположения измерительной оси относительно заданного положения, λ1, λ2 - углы поворота акселерометра из начального положения, при которых сигнал с акселерометра равен нулю.
На чертеже представлена базовая ортогональная система координат OXYZ и орт е (измерительная ось акселерометра), заданный углами α, β и γ, которые он образует с положительными направлениями осей OXYZ. Плоскость, заданная векторами OZ и е, образует прямой угол с плоскостью OXY. Вектор OA1 является осью первого разворота, принадлежит плоскости OXY и образует угол ϕ1 с вектором ОХ. Вектор ОА2 является осью второго разворота, принадлежит плоскости OXY и образует угол ϕ2 с вектором OX. λ1 - это угол поворота акселерометра из начального положения вокруг оси OA1 до положения, при которых сигнал с акселерометра равен нулю. λ2 - это угол поворота акселерометра из начального положения вокруг оси ОА2 до положения, при которых сигнал с акселерометра равен нулю. Угол δ - это угол между осью вращения ОА1 и измерительной осью акселерометра. Отрезок BD перпендикулярен оси вращения ОА1 и является катетом прямоугольного треугольника OBD. Дуга A1C и дуга а являются катетами сферического прямоугольного треугольника А1ВС с прямым углом С, а дуга с является его гипотенузой. Определим сигнал с акселерометра в исходном состоянии. Для этого рассмотрим прямоугольный треугольник OBD с прямым углом D. В нем катет BD можно выразить через гипотенузу е как

Таким образом, можно представить измеренный сигнал U от полного сигнала акселерометра F в случае, когда плоскость BOA1 перпендикулярна плоскости OXY, плоскость OXY горизонтальна, а вектор е совпадает с измерительной осью акселерометра как U=F×Sinδ. В случае, когда угол между плоскостью ВОА1 и плоскостью OXY равен μ, измеренный сигнал U можно представить как

В прямоугольном сферическом треугольнике A1BC гипотенуза с определена углом δ, а катет а - углом (90°-γ). Исходя из формулы синусов для сферических треугольников (Sina/SinA1=Sinc/SinC) получим:

Учитывая, что SinC=1, Sin(90°-γ)=Cosγ, a SinA1=Sinλ1, выражение (3) примет вид:

Подставив Sinδ из соотношения (4) в выражение (2), получим:

Учитывая, что в исходном состоянии μ=λ1, получим выражение для первого замера сигнала с акселерометра:

Сигнал с акселерометра после первого разворота вокруг оси OA1 на известный угол λP1 (второй замер) будет:

Разделив соотношение (7) на (6), получим:

Аналогичным образом получим соотношение для сигналов U3 (третий замер) и U1 (первый замер) после второго разворота вокруг оси ОА2 на известный угол λP2:

Определение угловых координат α, β и γ измерительной оси е акселерометра осуществляется следующим образом. Пусть поворотная установка имеет платформу, которую можно горизонтировать и устанавливать на нее акселерометр (прибор, в котором установлены акселерометры). Поворотная установка имеет две измерительные оси вращения OA1 и OA2 с точной фиксацией углов поворота, расположенные под углами ϕ1 и ϕ2 относительно оси X. Выставим плоскость OXY поворотной установки в горизонт. Проведем первый замер сигнала U1 с акселерометра в исходном состоянии. Вычислим углы λP1 и λP2 из соотношений:
Sin2λP1=Cos2γP:[1-(Cosϕ1×CosαP+CosβP×Sinϕ1)2]
Sin2λP2=Cos2γP:[1-(Cosϕ2×CosαP+CosβP×Sinϕ2)2]
где αP∈[α0-Δα, α0+Δα], βP∈[β0-Δβ, β0+Δβ], γP∈[γ0-Δγ, γ0+Δγ], α0, β0, γ0 - заданные угловые координаты измерительной оси, Δα, Δβ, Δγ - максимально возможная погрешность фактического расположения измерительной оси относительно заданного положения. Повернем платформу относительно оси ОА1 на угол λP1. Проведем второй замер сигнала U2 с акселерометра. Установим акселерометр (прибор) в исходное положение (выставим плоскость OXY поворотной установки в горизонт). Повернем платформу относительно оси ОА2 на угол λP2. Проведем третий замер сигнала U3 с акселерометра. Вычислим углы λ1 и λ2, решая уравнения (8) и (9). Подставим значения ϕ1, λ1 и ϕ2, λ2 в два последние равенства системы уравнений
Cos2α+Cos2β+Cos2γ=1
Sin2λ1=Cos2γ:[1-(Cosϕ1×Cosα+Cosβ×Sinϕ1)2]
Sin2λ2=Cos2γ:[1-(Cosϕ2×Cosα+Cosβ×Sinϕ2)2]
и, решая ее, определим угловые координаты α, β и γ измерительной оси акселерометра е в исходном базисе X, Y, Z.
Оценим влияние выбора угла λP (λP1 и λP2) на точность измерения сигнала с акселерометра и вычисления угла λ (λ1 и λ2). Выберем λP1 и λP2 из соотношений:
Sin2λP1=Cos2γP:[1-(Cosϕ1×CosαP+CosβP×Sinϕ1)2]
Sin2λP2=Cos2γP:[1-(Cosϕ2×CosαP+CosβP×Sinϕ2)2]
где αp∈[α0-Δα, α0+Δα], βP∈[β0-Δβ, β0+Δβ], γP∈[γ0-Δγ, γ0+Δγ], α0, β0, γ0 - заданные угловые координаты измерительной оси, Δα, Δβ, Δγ - максимально возможная погрешность фактического расположения измерительной оси относительно заданного положения. Покажем, что такой выбор дает лучшую точность измерения. Результат измерения сигнала с датчика UП с учетом относительной погрешности можно будет представить как:
UП=K×U, где K - коэффициент, определяющий погрешность. С учетом выражения (7) получим:

Это измерение с погрешностью приведет к неточному вычислению угла λ, который будет иметь погрешность Р, или

Приравнивая правые части выражений (10) и (11) и преобразовывая, получим:
K×Sin(λ-λP)/Sinλ=Sin(λ+Р-λP)/Sin(λ+Р)
Данное выражение является функцией зависимости Р от λP (Р=f(λP)), представленной в неявном виде. Проводя исследование данной функции (например, численным методом), видим, что
LimP=0

Т.е. чем ближе λP к λ, тем меньше величина (λ-λP), соответственно, меньше величина Sin(λ-λP). Следовательно, меньше сигнал с акселерометра и меньше сигнал с учетом относительной погрешности. Это приводит к уменьшению погрешности Р при вычислении угла λ. Выбор λP1 и λP2 из соотношений, приведенных в предлагаемой формуле изобретения, обеспечивает близость значений λP1 и λP2 к значениям λ1 и λ2 соответственно.
Эффект от использования предлагаемого способа заключается в том, что он проще известного, т.к. для определения угловых координат акселерометра требуется всего три измерения сигнала с акселерометра и два поворота последнего на определенные углы. В то время как в прототипе требуется проводить несколько последовательных поворотов с последующими замерами сигнала с акселерометра до тех пор, пока сигнал не уменьшится до определенной величины. При этом для уменьшения числа итераций по последовательному приближению требуется наличие хорошей квалификации у оператора.
Вместе с тем предложенный способ позволяет увеличить экономичность определения координат измерительной оси за счет того, что сокращается время на проведение работ. Так, например, в случае, если необходимо получить точность прибора на уровне 10-5 по абсолютной величине, диапазон измеряемых ускорений составляет 10 м/с2, а вес одного разряда приращения 4 мм/с. Т.е. величина минимального измеряемого сигнала составит 10 м/с2×10-5=0,1 мм/с2. И период следования информационных импульсов (кодовых посылок) от минимального полезного сигнала составит 4 мм/с:0,1 мм/с2=40 с. Следовательно, период следования кода, формируемого за счет погрешности, должен быть больше. Учитывая, что трудно (с точки зрения стоимости) бороться с погрешностью, вызванной электронной частью прибора, желательно минимизировать погрешность от неправильной тарировки (измерения координат) датчиков. Это вызывает необходимость увеличивать период следования кода от неправильной установки примерно на порядок, т.е. до 400 с. С учетом особенностей работы измерительных приборов (организации цикла измерения, например, с целью защиты от "плавания" периода, вызванного синхронизацией преобразования и передачи информационного кода, вводится измерение нескольких периодов и вычисления среднего), реальное время измерения может быть значительно больше. Учитывая, что операция разворота занимает много времени и необходимо провести измерение параметров нескольких акселерометров, установленных в приборе, при реализации способа-прототипа, потребуется очень много времени, что делает его дорогим в части трудозатрат. Поэтому в случае применения акселерометров, не имеющих нулевой составляющей сигнала (сигнал акселерометра равен нулю при отсутствии ускорения), предлагаемый способ является более экономичным.
Точность определения угловых координат у предложенного способа будет не хуже, чем у прототипа для датчиков с линейным коэффициентом преобразования. У заявляемого способа она определяется погрешностью измерения, а у прототипа - погрешностью измерения плюс допуск на устанавливаемый нулевой сигнал (сигнал, при котором прекращаются действия по изменению наклона для достижения еще более низкого сигнала с акселерометра). При этом абсолютные погрешности измерений у предлагаемого способа могут быть больше. Рассмотрим их влияние на вычисление углов λ. На практике приходится решать задачу по измерению фактических угловых координат α, β и γ измерительной оси акселерометра, получившихся при изготовлении прибора и отличающихся от заданных α0, β0, γ0 на некоторые небольшие значения ±Δi (i=α, β, γ). Вычисленное значение углов λP будет отличаться от углов λ (при повороте на который сигнал с акселерометра равен нулю) на величину того же порядка, что и допуска ±Δi (будет изменяться в зависимости от соотношения углов α, β и γ). Пусть, например, эта разница составляет 20′, искомый угол λ1=45°, вычисленный угол λP1=44° 40′, относительная погрешность измерения сигнала с акселерометра 0,001. Вычислим угол λ1, подставляя выбранные значения в уравнение (8) и решая его, при этом примем, что U2=(1+0,001)×Sin45°, a U1=(1-0,001)×Sin20' (т.е. наихудший случай, когда погрешности при измерении имеют разный знак). В результате получим λ1=44,999330°, т.е. погрешность составляет всего 2,42". В случае уменьшения относительной погрешности при измерении сигнала с акселерометра погрешность при вычислении будет еще меньше. Уменьшение допуска на устанавливаемый нулевой сигнал ниже нескольких секунд у способа-прототипа приводит к увеличению операций разворот-измерение.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
Для реализации данного способа необходима платформа с не менее чем двумя рамками карданного подвеса (двумя степенями свободы), например, такая, как представлена в [3] страница 158.
Литература
1. Патент Российской Федерации №02117950 от 20.08.98. Способ определения параметров прецизионных акселерометров. G01P 21/00.
2. Патент Российской Федерации №02164693 от 29.07.99. Способ определения угловых координат измерительной оси акселерометра. G01P 21/00.
3. Савант С.Дж., Ховард Р., Соллоуай С., Савант С.А. Принципы инерциальной навигации. Издательство "Мир", 1965 г.
Изобретение относится к области измерения и может быть использовано для настройки и калибровки акселерометров и приборов, содержащих акселерометры. Способ включает измерение сигнала в исходном положении и после двух разворотов вокруг двух горизонтальных осей, положение которых известно относительно ортогонального базиса, на определенные углы с последующим измерением сигналов с акселерометра. Углы разворота и угловые координаты определяются из соответствующих соотношений, что упрощает способ и, следовательно, позволяет использовать простое технологическое оборудование (с меньшим числом степеней свободы) для калибровки приборов, содержащих акселерометры. 1 ил.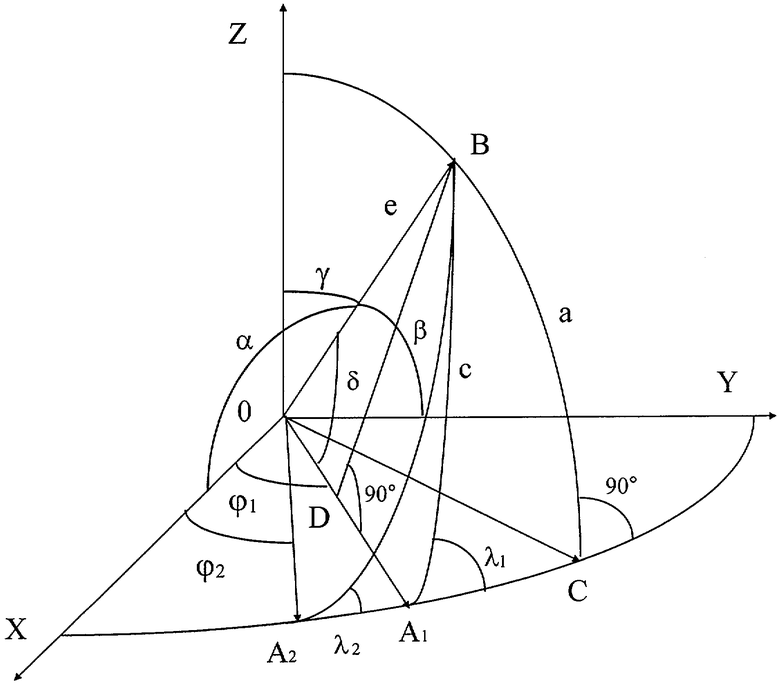
Способ определения угловых координат измерительной оси акселерометра относительно ортогонального базиса X, Y, Z, включающий первый и второй развороты вокруг горизонтальной оси, расположенной в плоскости горизонта XOY, при этом первый разворот акселерометра из начального положения вокруг первой оси OA1, расположенной под углом ϕ1 к оси Х базиса, проводят на угол λP1, после чего из начального положения производят второй разворот акселерометра вокруг второй оси ОА2, расположенной в плоскости XOY под углом ϕ2 к оси X, на угол λP2, отличающийся тем, что измеряют сигналы акселерометра U1 в исходном положении, U2 после первого и U3 после второго разворотов на углы λP1 и λP2, а угловые координаты α, β и γ определяют из соотношений:
U2/U1=Sin(λ1-λP1)/Sinλ1,
U3/U1=Sin(λ2-λP2)/Sinλ2,
Cos2α+Cos2β+Cos2γ=1,
Sin2λ1=Cos2γ:[1-(Cosϕ1·Cosα+Cosβ·Sinϕ1)2],
Sin2λ2=Cos2γ:[1-(Cosϕ2·Cosα+Cosβ·Sinϕ2)2],
при этом величину углов λP1 и λP2 выбирают из соотношений:
Sin2λP1=Cos2γP:[1-(Cosϕ1·CosαP+CosβP·Sinϕ1)2],
Sin2λP2=Cos2γP:[1-(Cosϕ2·CosαP+CosβP·Sinϕ2)2],
где αP∈[α0-Δα, α0+Δα], βP∈[β0-Δβ, β0+Δβ], γP∈[γ0-Δγ, γ0+Δγ];
α0, β0, γ0 - заданные угловые координаты измерительной оси;
Δα, Δβ, Δγ - максимально возможная погрешность фактического расположения измерительной оси относительно заданного положения;
λ1, λ2 - углы поворота акселерометра из начального положения, при которых сигнал с акселерометра равен нулю.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ИЗМЕРИТЕЛЬНОЙ ОСИ АКСЕЛЕРОМЕТРА | 1999 |
|
RU2164693C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННЫХ АКСЕЛЕРОМЕТРОВ | 1994 |
|
RU2117950C1 |
| US 6823279 В1, 23.11.2004 | |||
| JP 9251031 А, 22.09.1997. | |||

