Изобретение относится к области управления ориентацией и движением центра масс космических аппаратов (КА) и направлено на получение максимального значения скорости коррекции орбиты КА с минимальными ошибками управления при одновременном применении реактивных двигателей ориентации (ДО) и силовых гироскопов (СГ) и обеспечение минимального числа насыщений системы СГ в процессе выполнения программы полета КА после коррекции орбиты, а, следовательно, минимизацию расхода рабочего тела и влияния на орбиту, обусловленного необходимостью включения ДО для разгрузки накопленного СГ кинетического момента.
Известен способ управления КА, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг (см. [1] ). В предлагаемом способе к корпусу КА прикладывают по трем осям связанного базиса управляющие моменты сил тяг реактивных двигателей (РД), установленных четырьмя равнотяговыми секциями в двух параллельных базовой плоскости ("север - восток") и равноудаленных от нее плоскостях, обеспечивая суммирование проекций этих моментов на ось требуемого управляющего момента и компенсацию по остальным осям. При этом коррекцию орбиты КА по двум направлениям (связанным осям, например "север - юг" и "запад - восток ") производят тягами РД, проекции которых совпадают с данными направлениями (осями), а возмущающие моменты по этим осям взаимно компенсируются. Для создания по третьей оси момента, противоположного возмущающему, применяют РД с взаимной компенсацией их моментов и тяг по указанным осям. Блок-схема системы, реализующей способ-аналог, представленная в [1] , состоит из блока скорости коррекции (БСК), блока датчиков внешней информации опорного базиса (БДВИ), блока определения управляющих сил и моментов (БОУСМ), блока формирования управляющих сил и моментов (БФУСМ), блока определяемых значений продолжительности импульсов ДО (БОЗПИД), блока ДО (БДО), корпуса КА (ККА), блока датчиков угловой скорости (БДУС), блока датчиков линейных ускорений (БДЛУ), блока задания параметров управления КА (БЗПУКА). При этом выходы БСК и БДВИ соединены соответственно с первым и вторым выходом БОУСМ, а выход БОУСМ соединен с первым входом БФУСМ. Выход БФУСМ соединен с первым входом БОЗПИД, а выход БОЗПИД - со входом БДО. В свою очередь БДО соединен со вторым входом БОЗПИД. На корпусе КА установлены БДО, БДУС и БДЛУ. При этом выход БДУС соединен с третьим входом БОУСМ, а выход БДЛУ соединен с первым входом БСК. Первый, второй, третий и четвертый выходы БЗПУКА соединены соответственно с входом БДВИ, вторым входом БСК, четвертым входом БОУСМ и вторым входом БФУСМ. Этот способ и разработанная на его основе система управления позволяют уменьшить число РД и затраты топлива на коррекцию орбиты КА, но не решают важный вопрос получения максимальной скорости коррекции. Кроме того, в предлагаемом способе управление ориентацией КА в процессе коррекции орбиты с помощью РД отличается невысокой точностью, а это существенно, например, для спутников связи, точность ориентации которых должна составлять порядка 12'.
Наиболее близкий из аналогов способ управления КА с помощью реактивных исполнительных органов (см. [2] ), используемый в качестве прототипа, включает определение требуемого значения скорости коррекции орбиты КА, поддержание заданной ориентации КА с помощью силовых гироскопов в процессе коррекции орбиты двигателями ориентации, измерение при этом значения вектора кинетического момента в системе СГ, по известным значениям моментов инерции КА, а также по измеренным значениям вектора угловой скорости КА и кинетического момента в системе СГ определяют значения суммарного вектора кинетического момента КА  в текущие моменты времени (t), проверяют выполнение условия принадлежности значений
в текущие моменты времени (t), проверяют выполнение условия принадлежности значений  области располагаемых значений вектора кинетического момента в системе силовых гироскопов (S) и в случае насыщения системы СГ в момент времени ts определяют суммарное значение векторов управляющих моментов от двигателей ориентации при условии поочередного отключения каждого i-го двигателя, где i= 1, 2, . . . n - номера ДО, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых имеет наибольшую проекцию на направление, противоположное вектору
области располагаемых значений вектора кинетического момента в системе силовых гироскопов (S) и в случае насыщения системы СГ в момент времени ts определяют суммарное значение векторов управляющих моментов от двигателей ориентации при условии поочередного отключения каждого i-го двигателя, где i= 1, 2, . . . n - номера ДО, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых имеет наибольшую проекцию на направление, противоположное вектору  при соответствующем отключенном двигателе ориентации, а в случае, когда этот управляющий момент не является разгрузочными, для разгрузки силовых гироскопов включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору
при соответствующем отключенном двигателе ориентации, а в случае, когда этот управляющий момент не является разгрузочными, для разгрузки силовых гироскопов включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору  при этом никакой из указанных i-ых двигателей не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения указанного суммарного вектора кинетического момента для случая коррекции орбиты с учетом всех работающих указанных i-ых двигателей на интервале от текущего момента времени разгрузки до расчетного момента времени окончания коррекции, суммируют указанные спрогнозированные изменения вектора с текущим значением суммарного вектора
при этом никакой из указанных i-ых двигателей не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения указанного суммарного вектора кинетического момента для случая коррекции орбиты с учетом всех работающих указанных i-ых двигателей на интервале от текущего момента времени разгрузки до расчетного момента времени окончания коррекции, суммируют указанные спрогнозированные изменения вектора с текущим значением суммарного вектора  определенным на момент начала прогноза
определенным на момент начала прогноза  проверяют условие принадлежности полученных векторных сумм указанной области S и одновременно условие непринадлежности
проверяют условие принадлежности полученных векторных сумм указанной области S и одновременно условие непринадлежности  области S.
области S.
Если в этот момент времени не выполняются оба эти условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного i-го двигателя к процессу коррекции орбиты или отключения указанной разгрузочной пары ДО, после чего продолжают проверять выполнение условия принадлежности указанного вектора суммарного кинетического момента  области S вплоть до завершения коррекции и в случае невыполнения этого условия повторяют разгрузку системы СГ при помощи двигателей ориентации, создающих указанный момент, или при помощи разгрузочной пары двигателей ориентации, не участвующих в процессе коррекции орбиты.
области S вплоть до завершения коррекции и в случае невыполнения этого условия повторяют разгрузку системы СГ при помощи двигателей ориентации, создающих указанный момент, или при помощи разгрузочной пары двигателей ориентации, не участвующих в процессе коррекции орбиты.
Блок-схема системы, реализующей способ-прототип, состоит из следующих блоков: блок скорости коррекции (БСК), блок датчиков внешней информации опорного базиса (БДВИ), блок определения управляющих сил и моментов (БОУСМ), блок формирования управляющих сил и моментов (БФУСМ), блок определяемых значений продолжительности импульсов ДО (БОЗПИД), блок ДО (БДО), корпус КА (ККА), блок датчиков угловой скорости (БДУС), блок датчиков линейных ускорений (БДЛУ), блок задания параметров управления КА (БЗПУКА), блок силовых гироскопов (БСГ), блок определения значений суммарного вектора кинетического момента (БОЗСВКМ), блок сравнения параметров области располагаемых значений вектора кинетического момента в системе СГ и суммарного вектора кинетического момента СГ (БСПОРЗВКМСГСВКМ), блок формирования текущего времени разгрузки СГ (БФТВРСГ), блок прогнозируемых значений суммарного вектора кинетического момента (БПЗСВКМ), блок приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям (БППЗСВКМНУ), блок определения времени окончания режима коррекции (БОВОРК). БФУСМ содержит следующие блоки: блок выбора ДО для коррекции орбиты (БВДКО); блок формирования разгрузочного момента для системы СГ (БФРМСГ); блок определения разгрузочных моментов для системы СГ (БОРМСГ); блок выбора разгрузочного момента для системы СГ (БВРМСГ); блок выбора пары ДО для разгрузки системы СГ (БВПДРСГ).
При этом выходы БСК и БДВИ соединены соответственно с первым и вторым выходом БОУСМ, а выход БОУСМ соединен с первым входом БФУСМ. Выход БФУСМ соединен с первым входом БОЗПИД, а выход БОЗПИД - со входом БДО. В свою очередь БДО соединен со вторым входом БОЗПИД. На корпусе КА установлены БДО, БДУС и БДЛУ. При этом выход БДУС соединен с третьим входом БОУСМ, а выход БДЛУ соединен с первым входом БСК. Первый, второй, третий и четвертый выходы БЗПУКА соединены соответственно с входом БДВИ, вторым входом БСК, четвертым входом БОУСМ и вторым входом БФУСМ.
Вход БСГ соединен со вторым входом БОУСМ, а выход БСГ - с первым входом БОЗСВКМ. Первый выход БОЗСВКМ соединен с первым входом БСПОРЗВКМСГСВКМ, а второй выход этого же блока - с первым входом БППЗСВКМНУ и третьим входом БСПОРЗВКМСГСВКМ. Второй вход БОЗСВКМ соединен с выходом БДУС. Выход БФТВРСГ соединен с третьим входом БОЗСВКМ и первыми входами БПЗСВКМ и БОВОРК. Первый выход БСПОРЗВКМСГСВКМ соединен с первым входом БФТВРСГ, а второй выход - с третьим входом БФУСМ. Третий выход БСПОРЗВКМСГСВКМ соединен с четвертым входом БФУСМ и вторым входом БФТВРСГ. Второй вход БСПОРЗВКМСГСВКМ соединен с пятым выходом БЗПУКА, а четвертый вход этого же блока - с первым выходом БППЗСВКМНУ.
Выход БПЗСВКМ соединен со вторым входом БППЗСВКМНУ. Второй вход БПЗСВКМ соединен с первым выходом БОВОРК, третий и четвертый входы этого же блока соединены соответственно с третьим выходом БФУСМ и шестым выходом БЗПУКА.
Второй вход БОВОРК соединен со вторым выходом БСК, а третий вход - со вторым выходом БФУСМ.
Первый вход БВДКО соединен с БОУСМ, а второй вход - с четвертым выходом БЗПУКА. Первый выход БВДКО соединен с первым входом БФРМСГ и вторым входом БОРМСГ. Второй выход этого же блока соединен с третьим выходом БФУСМ. Первый выход БФРМСГ является одновременно первым выходом БФУСМ, а второй выход - вторым выходом БФУСМ. Второй вход БФРМСГ соединен с выходом БВРМСГ, а третий вход указанного блока является четвертым входом БФУСМ.
Первый вход БОРМСГ соединен с третьим входом БФУСМ, а третий вход указанного блока - с четвертым выходом БЗПУКА. Первый выход БОРМСГ соединен со вторым входом БВРМСГ, а второй выход этого же блока - с первым входом БВПДРСГ. Первый вход БВРМСГ соединен с третьим входом БФУСМ.
Второй вход БВПДРСГ соединен с выходом БЗПУКА, а третий вход - с четвертым входом БФУСМ. Первый выход БВПДРСГ соединен с первым выходом БФУСМ, а второй выход этого же блока - с третьим выходом БФУСМ.
Работает система управления следующим образом. По началу выполнения режима коррекции орбиты со второго выхода БОУСМ на второй вход БФУСМ выдаются требования на формирование управляющих сил Fi. Одновременно с первого выхода БОУСМ на первый вход БСГ выдаются требования на формирование управляющих моментов. БСГ формирует закон управления осями прецессии СГ (см. [3] стр. 12 - 13) по затребованным управляющим моментам. При этом за счет измерений, проводимых в блоке синус-косинусных преобразователей углов поворота осей прецессии, входящего в сосав БСГ, а также по известным значениям кинетического моментов роторов гиродвигателей определяется значение вектора кинетического момента системы СГ  При этом непосредственно значение
При этом непосредственно значение  определяется в БОЗСВКМ по указанным измеренным значениям, поступающим на его второй вход с выхода БСГ. На первый вход БОЗСВКМ с БДУС поступает информация о значениях вектора абсолютной угловой скорости КА
определяется в БОЗСВКМ по указанным измеренным значениям, поступающим на его второй вход с выхода БСГ. На первый вход БОЗСВКМ с БДУС поступает информация о значениях вектора абсолютной угловой скорости КА  В самом БОЗСВКМ имеются заранее заданные значения компонент тензора инерции КА
В самом БОЗСВКМ имеются заранее заданные значения компонент тензора инерции КА  В результате в нем определяется значение вектора
В результате в нем определяется значение вектора  Со второго выхода БОЗСВКМ значения
Со второго выхода БОЗСВКМ значения  поступают на второй вход БСПОРЗВКМСГСВКМ. В БСПОРЗВКМСГСВКМ производится проверка выполнения условия принадлежности вектора кинетического момента КА допустимой области S. При этом параметры области S могут изменяться в зависимости от числа работающих в системе силовых гироскопов. Указанные изменения в БСПОРЗВКМСГСВКМ производятся при помощи БЗПУКА, шестой выход которого соединен с шестым входом БСПОРЗВКМСГСВКМ. По этому же каналу в БСПОРЗВКМСГСВКМ передается разрешение на поиск времени начала формирования кинетического момента КА. В случае невыполнения указанного условия с третьего выхода указанного блока на второй вход БФТВРСГ выдается значение времени tS. Одновременно со второго выхода этого же блока на третий вход БФУСМ выдается значение вектора
поступают на второй вход БСПОРЗВКМСГСВКМ. В БСПОРЗВКМСГСВКМ производится проверка выполнения условия принадлежности вектора кинетического момента КА допустимой области S. При этом параметры области S могут изменяться в зависимости от числа работающих в системе силовых гироскопов. Указанные изменения в БСПОРЗВКМСГСВКМ производятся при помощи БЗПУКА, шестой выход которого соединен с шестым входом БСПОРЗВКМСГСВКМ. По этому же каналу в БСПОРЗВКМСГСВКМ передается разрешение на поиск времени начала формирования кинетического момента КА. В случае невыполнения указанного условия с третьего выхода указанного блока на второй вход БФТВРСГ выдается значение времени tS. Одновременно со второго выхода этого же блока на третий вход БФУСМ выдается значение вектора  Как только БФТВРСГ получает значение момента времени tS, он тут же формирует на своем выходе значение t'1 в соответствии с выражением
Как только БФТВРСГ получает значение момента времени tS, он тут же формирует на своем выходе значение t'1 в соответствии с выражением  η = 1,2,3,..., где Δt - продолжительность минимального импульса разгрузочного момента
η = 1,2,3,..., где Δt - продолжительность минимального импульса разгрузочного момента  или
или  В свою очередь t'1 передается на третий вход БОЗСВКМ, на третий вход и на четвертый вход БПЗСВКМ. По приходу в БОЗСВКМ значения t'1 в нем происходит присвоение текущего значения вектора кинетического момента
В свою очередь t'1 передается на третий вход БОЗСВКМ, на третий вход и на четвертый вход БПЗСВКМ. По приходу в БОЗСВКМ значения t'1 в нем происходит присвоение текущего значения вектора кинетического момента  значению
значению  Значение вектора
Значение вектора  поступает с первого выхода БОЗСВКМ на первый вход БППЗСВКМНУ и на третий вход БСПОРЗВКМСГСВКМ. В БППЗСВКМНУ оно служит в качестве начального условия в выражении
поступает с первого выхода БОЗСВКМ на первый вход БППЗСВКМНУ и на третий вход БСПОРЗВКМСГСВКМ. В БППЗСВКМНУ оно служит в качестве начального условия в выражении  а в БСПОРЗВКМСГСВКМ оно необходимо для проверки условия
а в БСПОРЗВКМСГСВКМ оно необходимо для проверки условия  Значение t'1, переданное в БПЗСВКМ, устанавливает нижнюю границу определенного интеграла, входящего в выражение
Значение t'1, переданное в БПЗСВКМ, устанавливает нижнюю границу определенного интеграла, входящего в выражение  где
где  главный вектор управляющего момента от всех работающих ДО без учета отключений i-х ДО или пар ДО;
главный вектор управляющего момента от всех работающих ДО без учета отключений i-х ДО или пар ДО;  главный вектор управляющего момента всех внешних возмущающих сил. Оно же задает в БОВОРК момент времени tk1 начала определения второй верхней границы указанного интеграла. Так, по приходу этого времени в БОВОРК из первого выхода БСК через первый вход БОВОРК считывается значение
главный вектор управляющего момента всех внешних возмущающих сил. Оно же задает в БОВОРК момент времени tk1 начала определения второй верхней границы указанного интеграла. Так, по приходу этого времени в БОВОРК из первого выхода БСК через первый вход БОВОРК считывается значение  Одновременно из первого выхода БФУСМ на второй вход БОВОРК приходит информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется
Одновременно из первого выхода БФУСМ на второй вход БОВОРК приходит информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется  Для этого используются известные силы тяги ДО и масса КА и производится расчет tk1 по выражению
Для этого используются известные силы тяги ДО и масса КА и производится расчет tk1 по выражению  где
где  измеренное значение скорости коррекции КА на момент времени t'1. Далее информация о значении tk1 передается на пятый вход БПЗСВКМ.
измеренное значение скорости коррекции КА на момент времени t'1. Далее информация о значении tk1 передается на пятый вход БПЗСВКМ.
Информация о номерах ДО, первоначально участвующих в коррекции орбиты, выдается также с третьего выхода БФУСМ на третий вход БПЗСВКМ. При этом каждому двигателю ставится в соответствие управляющий момент  который он создает. Причем значение указанных управляющих моментов задается в БПЗСВКМ через первый его вход с седьмого выхода БЗПУКА. Для ДО, не участвующих в управлении,
который он создает. Причем значение указанных управляющих моментов задается в БПЗСВКМ через первый его вход с седьмого выхода БЗПУКА. Для ДО, не участвующих в управлении,  По указанному каналу в БПЗСВКМ выдаются также значения, определяющие значения возмущающих моментов
По указанному каналу в БПЗСВКМ выдаются также значения, определяющие значения возмущающих моментов  (углы ориентации КА, положение солнечных батарей и т. д. ). С третьего выхода БФУСМ на третий вход БПЗСВКМ передаются также номера ДО для вектора
(углы ориентации КА, положение солнечных батарей и т. д. ). С третьего выхода БФУСМ на третий вход БПЗСВКМ передаются также номера ДО для вектора  По значениям
По значениям  в БПЗСВКМ определяется
в БПЗСВКМ определяется 
Далее  суммируется с полученным там же
суммируется с полученным там же  Затем производится интегрирование на интервале установленных границ. Полученные интегральные значения передаются со второго выхода БПЗСВКМ на второй вход БППЗСВКМНУ, где производится их суммирование с начальными значениями
Затем производится интегрирование на интервале установленных границ. Полученные интегральные значения передаются со второго выхода БПЗСВКМ на второй вход БППЗСВКМНУ, где производится их суммирование с начальными значениями  Полученная сумма с выхода БППЗСВКМНУ передается на первый вход БСПОРЗВКМСГСВКМ, где производится проверка выполнения условия ее принадлежности области S. Если в БСПОРЗВКМСГСВКМ при проверке не выполняется это условие и выполняется условие принадлежности области S текущего значения вектора кинетического момента, то значение tS подтверждается в БФТВРСГ и повторяется рассмотренный выше цикл разгрузки СГ на момент времени t'2 и т. д.
Полученная сумма с выхода БППЗСВКМНУ передается на первый вход БСПОРЗВКМСГСВКМ, где производится проверка выполнения условия ее принадлежности области S. Если в БСПОРЗВКМСГСВКМ при проверке не выполняется это условие и выполняется условие принадлежности области S текущего значения вектора кинетического момента, то значение tS подтверждается в БФТВРСГ и повторяется рассмотренный выше цикл разгрузки СГ на момент времени t'2 и т. д.
Если же в БСПОРЗВКМСГСВКМ при проверке выполняется условие принадлежности вектора кинетического момента КА области S или не выполняется условие принадлежности области S текущего значения вектора кинетического момента, то с первого выхода БСПОРЗВКМСГСВКМ на четвертый вход БФУСМ выдается команда на снятие режима разгрузки СГ, на первый вход БФТВРСГ - на прекращение режима поиска момента времени tz.
Недостатком способа и системы управления, описанных в прототипе, является то, что в конце процесса коррекции орбиты на суммарный кинетический момент КА накладывается единственное условие - нахождение его в допустимой области, а дальнейшее изменение кинетического момента в процессе движения КА по скорректированной орбите не прогнозируется. Но полученное на момент окончания коррекции орбиты значение суммарного значения кинетического момента КА может быть таковым, что в процессе выполнения последующей программы полета это значение выйдет за пределы допустимой области S и, как следствие, возникнет необходимость в разгрузке системы СГ с помощью ДО, что не желательно, т. к. приведет к дополнительному расходу рабочего тела и ухудшению орбиты, вызванному работой ДО.
Задачей, решаемой предлагаемым способом и системой, является такое управление кинетическим моментом КА в процессе коррекции орбиты КА, которое обеспечит формирование в момент времени завершения коррекции требуемого значения вектора кинетического момента КА, что позволит при дальнейшем выполнении программы полета минимизировать число включений ДО для разгрузки СГ, а, следовательно, минимизировать и расход рабочего тела, и влияние на орбиту КА.
Поставленная задача решается тем, что в предлагаемом способе управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов, включающем определение требуемого значения скорости коррекции орбиты космического аппарата, поддержание заданной ориентации космического аппарата с помощью силовых гироскопов в процессе коррекции орбиты двигателями ориентации, измерение при этом значения вектора кинетического момента в системе силовых гироскопов, по известным значениям моментов инерции космического аппарата, а также по измеренным значениям вектора угловой скорости космического аппарата и кинетического момента в системе силовых гироскопов определяют значения суммарного вектора кинетического момента космического аппарата  в текущие моменты времени (t), проверяют выполнение условия принадлежности значений суммарного вектора кинетического момента космического аппарата
в текущие моменты времени (t), проверяют выполнение условия принадлежности значений суммарного вектора кинетического момента космического аппарата  области располагаемых значений вектора кинетического момента в системе силовых гироскопов (S),
области располагаемых значений вектора кинетического момента в системе силовых гироскопов (S),
в отличие от известного способа прогнозируют заданную область (Sk), в которой должен находиться суммарный вектор кинетического момента космического аппарата  в момент времени завершения процесса коррекции орбиты, если в процессе коррекции орбиты насыщение системы силовых гироскопов не происходит, то с текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента космического аппарата, включая начало коррекции, шагами по Δt до момента времени
в момент времени завершения процесса коррекции орбиты, если в процессе коррекции орбиты насыщение системы силовых гироскопов не происходит, то с текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента космического аппарата, включая начало коррекции, шагами по Δt до момента времени  прогнозируют накопление кинетического момента КА
прогнозируют накопление кинетического момента КА  с учетом отключения i-го двигателя ориентации или включения пары двигателей ориентации для формирования требуемого кинетического момента космического аппарата в момент времени
с учетом отключения i-го двигателя ориентации или включения пары двигателей ориентации для формирования требуемого кинетического момента космического аппарата в момент времени  η = 1,2,3,..., где Δt- продолжительность минимального импульса момента
η = 1,2,3,..., где Δt- продолжительность минимального импульса момента  при условии включения пары двигателей ориентации или момента
при условии включения пары двигателей ориентации или момента  при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты,
при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты, VU - величина, определяющая заданную скорость коррекции орбиты,
VU - величина, определяющая заданную скорость коррекции орбиты,  текущее значение скорости коррекции орбиты на момент времени tη, aΣ- расчетное значение ускорения космического аппарата от двигателей ориентации, участвующих в коррекции орбиты, суммируют спрогнозированные значения вектора
текущее значение скорости коррекции орбиты на момент времени tη, aΣ- расчетное значение ускорения космического аппарата от двигателей ориентации, участвующих в коррекции орбиты, суммируют спрогнозированные значения вектора  с текущим значением суммарного вектора
с текущим значением суммарного вектора  определенным на момент начала прогноза tη, проверяют выполнение условия принадлежности полученных значений суммарного вектора кинетического момента космического аппарата заданной области Sk, и если оно выполняется, то по достижению временем коррекции значения, равного
определенным на момент начала прогноза tη, проверяют выполнение условия принадлежности полученных значений суммарного вектора кинетического момента космического аппарата заданной области Sk, и если оно выполняется, то по достижению временем коррекции значения, равного  , определяют суммарное значение векторов управляющих моментов
, определяют суммарное значение векторов управляющих моментов  от двигателей ориентации при условии отключения i-го двигателя, где i= l, 2, . . . n - номера двигателей ориентации, участвующих в коррекции орбиты, создают двигателями ориентации момент для системы силовых гироскопов, суммарный момент которых имеет наибольшую проекцию на направление, противоположное вектору
от двигателей ориентации при условии отключения i-го двигателя, где i= l, 2, . . . n - номера двигателей ориентации, участвующих в коррекции орбиты, создают двигателями ориентации момент для системы силовых гироскопов, суммарный момент которых имеет наибольшую проекцию на направление, противоположное вектору  при соответствующем отключенном двигателе ориентации, а в случае, когда управляющие моменты
при соответствующем отключенном двигателе ориентации, а в случае, когда управляющие моменты  не являются разгрузочными, для формирования требуемого кинетического момента включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору
не являются разгрузочными, для формирования требуемого кинетического момента включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору  при этом никакой из указанных i-х двигателей не отключают.
при этом никакой из указанных i-х двигателей не отключают.
Поставленная задача решается тем, что в систему управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов, содержащую блок скорости коррекции орбиты космического аппарата, блок датчиков внешней информации опорного базиса, блок определения управляющих сил и моментов, блок двигателей ориентации, блок датчиков угловой скорости космического аппарата, блок датчиков его линейных ускорений, блок задания параметров управления космическим аппаратом, блок определения времени окончания режима коррекции, блок приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условием, блок силовых гироскопов, блок определения значений суммарного вектора кинетического момента, блок формирования управляющих сил и моментов, состоящий из блока выбора двигателей ориентации для коррекции орбиты, блока формирования разгрузочного момента для системы силовых гироскопов, блока определения разгрузочных моментов для системы силовых гироскопов, блока выбора разгрузочного момента для системы силовых гироскопов, блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, блока определяемых значений продолжительности импульсов тяги двигателей ориентации, причем выходы указанных блоков скорости коррекции и датчиков внешней информации опорного базиса соединены соответственно с первым и вторым входами блока определения управляющих сил и моментов, а первый выход последнего указанного блока соединен с первым входом блока формирования управляющих сил и моментов, первый выход блока формирования управляющих сил и моментов соединен с первым входом блока определяемых значений продолжительности импульсов тяги двигателей ориентации, а выход последнего указанного блока соединен с входом блока двигателей ориентации, выход блока двигателей ориентации соединен со вторым входом блока определяемых значений продолжительности импульсов тяги двигателей ориентации, выход блока датчиков линейных ускорений соединен с первым входом блока скорости коррекции орбиты космического аппарата, а выход блока датчиков угловой скорости космического аппарата соединен с третьим входом блока определения управляющих сил и моментов и вторым входом блока определения значений суммарного вектора кинетического момента, а второй выход блока определения управляющих сил и моментов соединен с входом блока силовых гироскопов, а выход последнего - с первым входом блока определения значений суммарного вектора кинетического момента, второй выход блока определения значений суммарного вектора кинетического момента соединен с первым входом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, второй выход блока формирования управляющих сил и моментов соединен с третьим входом блока определения времени окончания режима коррекции, а второй вход блока определения времени окончания режима коррекции соединен со вторым выходом блока скорости коррекции орбиты космического аппарата, первый выход блока задания параметров управления космическим аппаратом соединен со входом блока датчиков внешней информации опорного базиса, второй выход - со вторым входом блока скорости коррекции орбиты космического аппарата, третий выход - с четвертым входом блока определения управляющих сил и моментов, четвертый выход - со вторым входом блока формирования управляющих сил и моментов, причем первый вход блока выбора двигателей ориентации для коррекции орбиты соединен с блоком определения управляющих сил и моментов, а второй вход - с четвертым выходом блока задания параметров управления космическим аппаратом, первый выход блока выбора двигателей ориентации для коррекции орбиты соединен с первым входом блока формирования разгрузочного момента для системы силовых гироскопов и вторым входом блока определения разгрузочного момента для системы силовых гироскопов, второй выход блока формирования разгрузочного момента для системы силовых гироскопов является одновременно вторым выходом блока формирования управляющих сил и моментов, а первый выход - первым выходом блока формирования управляющих сил и моментов, второй вход блока формирования разгрузочного момента для системы силовых гироскопов соединен с выходом блока выбора разгрузочного момента для системы силовых гироскопов, второй вход блока выбора разгрузочного момента для системы силовых гироскопов соединен с первым выходом блока определения разгрузочных моментов для системы силовых гироскопов, третий вход блока определения разгрузочных моментов для системы силовых гироскопов соединен с четвертым выходом блока задания параметров управления космическим аппаратом, второй выход блока определения разгрузочных моментов для системы силовых гироскопов соединен с первым входом блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, а второй вход последнего - с четвертым выходом блока задания параметров управления космическим аппаратом, первый выход блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов соединен с первым выходом блока формирования управляющих сил и моментов, в отличие от известной системы дополнительно включены блок определения заданной области кинетического момента, блок сравнения текущего времени коррекции орбиты космического аппарата и расчетного времени начала формирования суммарного вектора кинетического момента космического аппарата, блок сравнения параметров заданной области кинетического момента космического аппарата и суммарного вектора кинетического момента космического аппарата, блок задания текущего времени формирования кинетического момента космического аппарата, блок прогнозируемых значений суммарного вектора кинетического момента в процессе формирования суммарного вектора кинетического момента, блок определения времени начала формирования кинетического момента, причем первый вход блока сравнения параметров заданной области кинетического момента космического аппарата и суммарного вектора кинетического момента космического аппарата соединен с первым выходом блока определения значений суммарного вектора кинетического момента, второй вход - с пятым выходом блока задания параметров управления космического аппарата, третий вход - со вторым выходом блока определения значений суммарного вектора кинетического момента, четвертый вход - с первым выходом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, пятый вход - с выходом блока определения заданной области кинетического момента, шестой вход - с выходом блока сравнения текущего времени коррекции орбиты космического аппарата и расчетного времени начала формирования суммарного вектора кинетического момента космического аппарата, первый выход этого же блока соединен с первым входом блока задания текущего времени формирования кинетического момента космического аппарата, второй выход этого блока соединен с третьим входом блока формирования управляющих сил и моментов, третий выход- с четвертым входом блока формирования управляющих сил и моментов и вторым входом блока задания текущего времени формирования кинетического момента космического аппарата, выход блока задания текущего времени формирования кинетического момента космического аппарата соединен с первым входом блока определения времени окончания режима коррекции, третьим входом блока определения значений суммарного вектора кинетического момента и первым входом блока прогнозируемых значений суммарного вектора кинетического момента в процессе формирования суммарного вектора кинетического момента, второй вход блока прогнозируемых значений суммарного вектора кинетического момента в процессе формирования суммарного вектора кинетического момента соединен с первым выходом блока определения времени окончания режима коррекции, третий вход - с третьим выходом блока формирования управляющих сил и моментов, четвертый вход - с шестым выходом блока задания параметров управления космического аппарата, первый выход этого же блока соединен со вторым входом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, первый вход блока определения заданной области кинетического момента космического аппарата соединен с седьмым выходом блока задания параметров управления космическим аппаратом, второй вход - с выходом блока датчиков угловой скорости, третий вход - с выходом блока датчиков линейных ускорений, четвертый вход - с выходом блока силовых гироскопов, первый вход блока определения времени начала формирования кинетического момента соединен с девятым выходом блока задания параметров управления космическим аппаратом, второй вход - с выходом блока датчиков угловой скорости, третий вход - с выходом блока датчиков линейных ускорений, четвертый вход - с выходом блока силовых гироскопов, пятый вход - со вторым выходом блока определения времени окончания режима коррекции, первый вход блока сравнения текущего времени коррекции орбиты космического аппарата и расчетного времени начала формирования суммарного вектора кинетического момента космического аппарата соединен с восьмым выходом блока задания параметров управления космического аппарата, второй вход - с выходом блока определения заданной области кинетического момента, второй выход блока выбора двигателей ориентации соединен с третьим входом блока прогнозируемых значений суммарного вектора кинетического момента в процессе формирования суммарного вектора кинетического момента, первый вход блока определения разгрузочных моментов для системы силовых гироскопов и первый вход блока выбора разгрузочного момента для системы силовых гироскопов соединены со вторым выходом блока сравнения параметров заданной области кинетического момента космического аппарата и суммарного вектора кинетического момента космического аппарата, третий вход блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов и третий вход блока формирования разгрузочного момента для системы силовых гироскопов соединены с третьим выходом блока сравнения параметров заданной области кинетического момента космического аппарата и суммарного вектора кинетического момента космического аппарата, второй выход блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов соединен с третьим входом блока прогнозируемых значений суммарного вектора кинетического момента в процессе формирования суммарного вектора кинетического момента.
Предлагаемый способ и система лишены недостатков, присущих прототипу, т. к. для того, чтобы после завершения коррекции орбиты КА минимизировать расход рабочего тела и влияние на орбиту, обусловленное необходимостью включения ДО для разгрузки системы СГ, при выполнении программы полета КА на задаваемом интервале времени осуществляется приведение кинетического момента КА в конце процесса коррекции орбиты в заданную область, которая определяется из условия минимизации числа насыщений системы СГ при выполнении программы полета КА, а, следовательно, и требуемых включений ДО для ее разгрузки.
Для пояснения сущности предлагаемого способа приводятся фиг. 1, 2, 3, 4, 5, 6, 7, 8. На фиг. 1 изображен корпус КА, двигатели ориентации и жестко связанная с КА система координат  (ССК). На фиг. 2 показан корпус КА, положение центра масс КА в плоскости XOZ ССК и направление действия векторов сил тяги ДО. На фиг. 3, 4, 5 приведены графики изменения кинетического момента КА при поддержании неизменной ориентации аппарата с помощью СГ с разными начальными условиями по кинетическому моменту КА. Фиг. 6 иллюстрирует пример реализации части системы управления. На фиг. 6 показана система управления, разработанная для реализации предлагаемого способа управления кинетическим моментом КА в процессе коррекции орбиты. На фиг. 7 изображены составляющие БФСУМ и их связь с остальными элементами предлагаемой системы управления. На фиг. 8 показан пример системы управления, разработанной для реализации предлагаемого способа.
(ССК). На фиг. 2 показан корпус КА, положение центра масс КА в плоскости XOZ ССК и направление действия векторов сил тяги ДО. На фиг. 3, 4, 5 приведены графики изменения кинетического момента КА при поддержании неизменной ориентации аппарата с помощью СГ с разными начальными условиями по кинетическому моменту КА. Фиг. 6 иллюстрирует пример реализации части системы управления. На фиг. 6 показана система управления, разработанная для реализации предлагаемого способа управления кинетическим моментом КА в процессе коррекции орбиты. На фиг. 7 изображены составляющие БФСУМ и их связь с остальными элементами предлагаемой системы управления. На фиг. 8 показан пример системы управления, разработанной для реализации предлагаемого способа.
Для реализации предлагаемого способа управления КА необходимо в первую очередь определить заданную область кинетического момента КА, т. е. область, в которой должен находиться вектор кинетического момента КА после завершения коррекции орбиты. Единственное условие, которому должна удовлетворять указанная область, - минимизация числа насыщений СГ при управлении ориентацией КА на задаваемом временном интервале. Решается задача определения области кинетического момента моделированием движения КА на этом интервале времени. Исходя из результатов моделирования определяется область, в которой должен находиться вектор кинетического момента КА.
Далее предлагаемый способ описан более подробно.
Для определения заданной области кинетического момента КА, т. е. области, в которой должен находиться вектор кинетического момента КА после завершения коррекции орбиты, осуществляется математическое моделирование движения КА с момента завершения коррекции орбиты на задаваемом временном интервале, например до момента начала следующей коррекции. Система уравнений, описывающих математическую модель движения центра масс КА и его движение относительно центра масс, может быть записана в следующем виде:
Здесь  радиус-вектор КА,
радиус-вектор КА,  вектор суммарного кинетического момента КА;
вектор суммарного кинетического момента КА;  - кинетический момент системы СГ;
- кинетический момент системы СГ;  угловая скорость спутника;
угловая скорость спутника;  векторы суммарной силы и суммарного момента внешних сил, действующих на КА соответственно;
векторы суммарной силы и суммарного момента внешних сил, действующих на КА соответственно;  тензор инерции КА; m - масса КА.
тензор инерции КА; m - масса КА.
Решая уравнения (1), зная в исходный момент времени начальные значения вектора состояния КА  (где
(где  вектор скорости КА), вектор его угловой скорости
вектор скорости КА), вектор его угловой скорости  варьируя исходные
варьируя исходные
значения вектора  и, следовательно,
и, следовательно,  , определим заданную область, в которой должен находиться кинетический момент КА на момент завершения процесса коррекции орбиты КА для минимизации расхода рабочего тела при управлении его ориентацией на задаваемом временном интервале. После определения заданной области кинетического момента, зная вектор состояния КА на момент завершения коррекции, т. е. , другими словами, имея результаты решения задачи, необходимо найти начальные значения этих величин, которые будут удовлетворять требуемому результату решения. Т. к. начальные значения вектора состояния КА на момент начала коррекции орбиты известны, то требуется определить начальные значения кинетического момента КА.
, определим заданную область, в которой должен находиться кинетический момент КА на момент завершения процесса коррекции орбиты КА для минимизации расхода рабочего тела при управлении его ориентацией на задаваемом временном интервале. После определения заданной области кинетического момента, зная вектор состояния КА на момент завершения коррекции, т. е. , другими словами, имея результаты решения задачи, необходимо найти начальные значения этих величин, которые будут удовлетворять требуемому результату решения. Т. к. начальные значения вектора состояния КА на момент начала коррекции орбиты известны, то требуется определить начальные значения кинетического момента КА.
Для их определения осуществляется моделирование процесса коррекции орбиты КА. Если при коррекции орбиты наступит насыщение системы СГ, то логично попытаться совместить неизбежный процесс разгрузки СГ с формированием такого кинетического момента КА, который позволит завершить процесс коррекции орбиты КА без повторного насыщения системы СГ и, более того, даст возможность на момент завершения коррекции орбиты получить вектор кинетического момента КА, принадлежащий заданной области. Моделирование может осуществляться, например, с использованием уравнений (1). При его реализации учитываются известные характеристики ДО, их влияние на изменение кинетического момента КА, степень участия в коррекции орбиты. Выбор ДО должен быть таким, чтобы уменьшить влияние процессов, связанных с формированием требуемого кинетического момента КА, на коррекцию орбиты.
Поясним сущность предлагаемого способа на примере. Для повышения наглядности решения используются фиг. 1 и фиг. 2. На фиг. 1, и фиг. 2 изображен корпус КА, двигатели ориентации (D1-D24), жестко связанная с КА система координат  (ССК), смещенное относительно начала ССК положение центра масс (⊕) и направление действия векторов сил тяги ДО D9, D10, D11, D12
(ССК), смещенное относительно начала ССК положение центра масс (⊕) и направление действия векторов сил тяги ДО D9, D10, D11, D12
Обозначим момент времени, в который произошло насыщение системы СГ, как tS, а tp - момент времени начала формирования кинетического момента КА, если в процессе коррекции орбиты насыщения системы СГ не было. Предположим, что на КА установлена система СГ с областью S, описанной сферой радиусом Rсф.
Пусть, например, нам необходимо провести коррекцию орбиты в направлении оси ОХ (см. фиг. 1,2). Для этого необходимо включить двигатели D9-D12. Из-за смещения центра масс КА двигателями 9, 11 будет создаваться возмущающий момент. Этот момент нарушает требуемую ориентацию КА. Компенсация возникшего возмущающего момента осуществляется системой СГ, что позволяет максимально использовать тягу двигателей D9-D12, а, следовательно, увеличить продолжительность выдачи корректирующего импульса и уменьшить время проведения коррекции орбиты.
Предположим, что после завершения коррекции орбиты КА должен находиться в режиме поддержания ориентации до следующей коррекции в течение интервала времени Δt′. Решая систему уравнений (1), варьируя исходные значения кинетического момента СГ, определяем область, в которой должен находиться кинетический момент СГ для того, чтобы минимизировать расход рабочего тела на интервале времени Δt′. Как показывает практика, во многих случаях для прогноза накопления кинетического момента КА достаточно решения уравнений вращательного движения КА без подробного моделирования движения центра масс КА. Тогда систему уравнений (1), например, для геостационарного спутника, можно записать в следующем виде:
Здесь  полный кинетический момент КА;
полный кинетический момент КА;  кинетический момент системы СГ;
кинетический момент системы СГ;  - угловая скорость КА;
- угловая скорость КА;  - соответственно гравитационные моменты, вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;
- соответственно гравитационные моменты, вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;  магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;
магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;  орты векторов Земля-КА, Солнце-КА, Луна-спутник;
орты векторов Земля-КА, Солнце-КА, Луна-спутник;  тензор инерции КА;
тензор инерции КА;
μE= 3.986032•105км3/с2,
μS= 1.32715445•1011км3/с2
μM= 4.90264•105км3/с2 - гравитационные параметры Земли, Луны и Солнца; RE, RS, RM - радиус-векторы Земли, Луны и Солнца;  - момент от силы светового давления
- момент от силы светового давления  которая возникает при попадании потока солнечного света на спутник и при его отражении. S - площадь поперечного сечения КА; Е0 - мощность потока солнечного излучения; с - скорость света; r* - средний радиус орбиты Земли; Δ- расстояние от КА до Солнца; k - коэффициент отражения света поверхностью КА;
которая возникает при попадании потока солнечного света на спутник и при его отражении. S - площадь поперечного сечения КА; Е0 - мощность потока солнечного излучения; с - скорость света; r* - средний радиус орбиты Земли; Δ- расстояние от КА до Солнца; k - коэффициент отражения света поверхностью КА;  собственный магнитный момент КА;
собственный магнитный момент КА;  магнитное поле Земли.
магнитное поле Земли.
Как показала практика, прогноз накопления кинетического момента КА, полученный при решении уравнений (2) для геостационарного спутника связи "Ямал", дает хорошие результаты. Итак, результатом решения будет некоторая область кинетического момента КА (Sk), назовем ее заданной, в которую должен попасть кинетический момент КА по завершению коррекции его орбиты. После определения заданной области кинетического момента осуществляется моделирование процесса коррекции КА с помощью уравнений (1).
Если в процессе коррекции орбиты насыщение системы СГ не будет иметь место, то необходимо сформировать кинетический момент КА к моменту времени завершения коррекции орбиты. Для этого определяется время начала формирования кинетического момента. Моделируется процесс коррекции орбиты КА с помощью выражений (1) и (2), начиная с исходного момента времени выполнения коррекции. Определив время завершения процесса коррекции (tk), значение кинетического момента КА в момент завершения коррекции орбиты и зная динамику его изменения, находят приращение вектора кинетического момента КА, которое он должен получить для того, чтобы оказаться в заданной области Sk. Исходя из этого выбирают ДО, способные сообщить это приращение за кратчайшее время, и, определив продолжительность режима формирования кинетического момента КА, находят момент времени tp его начала. Поиск tp выполняют шагами по Δt- продолжительность минимального импульса момента  при условии включения пары двигателей ориентации или момента
при условии включения пары двигателей ориентации или момента  при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты, для формирования заданного кинетического момента космического аппарата. Т. е. с текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента КА, и до момента времени tkη прогнозируем накопление кинетического момента с учетом отключения в момент времени
при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты, для формирования заданного кинетического момента космического аппарата. Т. е. с текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента КА, и до момента времени tkη прогнозируем накопление кинетического момента с учетом отключения в момент времени  i-го ДО или включения пары ДО для формирования требуемого кинетического момента КА.
i-го ДО или включения пары ДО для формирования требуемого кинетического момента КА.

Прогноз осуществляем с нулевыми начальными значениями по вектору 

где  главный вектор управляющего момента от всех работающих ДО без учета отключений i-ых ДО или включения пар ДО;
главный вектор управляющего момента от всех работающих ДО без учета отключений i-ых ДО или включения пар ДО;  главный вектор управляющего момента от всех работающих ДО с учетом отключений i-го ДО или включения пар ДО;
главный вектор управляющего момента от всех работающих ДО с учетом отключений i-го ДО или включения пар ДО;  главный вектор управляющего момента всех внешних возмущающих сил. Значение tkη определяется следующим образом:
главный вектор управляющего момента всех внешних возмущающих сил. Значение tkη определяется следующим образом:
где Vt - измеренное значение скорости коррекции КА на момент времени tη. Спрогнозированное значение  суммируем с реальными начальными условиями по кинетическому моменту
суммируем с реальными начальными условиями по кинетическому моменту  полученными на момент времени t начала прогноза.
полученными на момент времени t начала прогноза.
Далее проверяем выполнение условия
и если оно выполняется, то tp= t′η и в этот момент времени с помощью выбранных ДО начинается управление кинетическим моментом КА, которое приведет его в момент завершения процесса коррекции орбиты в заданную область, иначе повторяем цикл расчетов на момент времени t2 и т. д. до выполнения условия (7).
ДО для формирования заданного значения кинетического момента выбираются следующим образом. Для достижения максимальной эффективности необходимо, чтобы вектор  и вектор момента от ДО были противоположно направлены, причем чем больше тупой угол между указанными векторами, тем быстрее происходит формирование заданного значения кинетического момента. Вектора моментов при поочередном отключении ДО, участвующих в коррекции орбиты, определяются следующим образом:
и вектор момента от ДО были противоположно направлены, причем чем больше тупой угол между указанными векторами, тем быстрее происходит формирование заданного значения кинетического момента. Вектора моментов при поочередном отключении ДО, участвующих в коррекции орбиты, определяются следующим образом:
- при отключении двигателя D9:
- при отключении двигателя D10:
- при отключении двигателя D11:
- при отключении двигателя D12:
где  - радиус-векторы точки приложения соответствующих тяг двигателей
- радиус-векторы точки приложения соответствующих тяг двигателей  где
где  (i= 9, 10, 11, 12) - радиус-векторы точки приложения соответствующих тяг двигателей
(i= 9, 10, 11, 12) - радиус-векторы точки приложения соответствующих тяг двигателей  Должно выполняться следующее условие:
Должно выполняться следующее условие:
Выбрав те ДО, для которых условие (12) выполняется, обозначим их  определяем те ДО, при отключении которых суммарный момент
определяем те ДО, при отключении которых суммарный момент  имеет наибольшую проекцию на направление, противоположное вектору
имеет наибольшую проекцию на направление, противоположное вектору  Математически это выражение можно записать в виде
Математически это выражение можно записать в виде
где ←_→ - знак соответствия.
В общем случае не всегда можно сформировать заданное значение кинетического момента, выбрав и отключив i-ый двигатель. Связано это с тем, что возможно возникновение ситуации, в которой каждый из векторов  будет перпендикулярен вектору
будет перпендикулярен вектору  или когда возмущающий момент от каждого из работающих для коррекции орбиты двигателей направлен по трем осям КА, а вектор
или когда возмущающий момент от каждого из работающих для коррекции орбиты двигателей направлен по трем осям КА, а вектор  накапливается таким образом, что условие (12) выполнить невозможно. В таких случаях предлагается использовать пару ДО, не участвующих в коррекции орбиты. При этом двигатели, выполняющие коррекцию орбиты, не отключаются и сохраняется максимальная величина корректирующего импульса. Из возможных вариантов выбора пар ДО для разгрузки СГ включают ту из них, момент которой имеет наибольшую проекцию на противоположное направление вектора
накапливается таким образом, что условие (12) выполнить невозможно. В таких случаях предлагается использовать пару ДО, не участвующих в коррекции орбиты. При этом двигатели, выполняющие коррекцию орбиты, не отключаются и сохраняется максимальная величина корректирующего импульса. Из возможных вариантов выбора пар ДО для разгрузки СГ включают ту из них, момент которой имеет наибольшую проекцию на противоположное направление вектора  т. е.
т. е.
где р= 1, 2, . . . - номера пар ДО, удовлетворяющих условию формирования кинетического момента:
здесь  вектора моментов от р-ых пар ДО;
вектора моментов от р-ых пар ДО;  вектор разгрузочного момента, максимально удовлетворяющий условию формирования ДО.
вектор разгрузочного момента, максимально удовлетворяющий условию формирования ДО.
В рассматриваемом случае в качестве пар ДО, участвующих в формировании кинетического момента, могут использоваться ДО ДО D15 и D6, D16 и D5 или D13 и D8, D7 и D14.
Сразу же по началу процесса формирования кинетического момента определяют момент времени его завершения (tZ). Этот момент времени будем определять из необходимой достаточности для завершения основного процесса коррекции орбиты КА и попаданию вектора  в момент завершения коррекции в заданную область кинетического момента КА Область поиска определяется временным интервалом (t, tks), где tks - момент завершения коррекции с учетом работы всех выбранных для коррекции ДО.
в момент завершения коррекции в заданную область кинетического момента КА Область поиска определяется временным интервалом (t, tks), где tks - момент завершения коррекции с учетом работы всех выбранных для коррекции ДО.
где Vu - заданная величина, определяющая скорость коррекции КА; Vts - текущее значение кажущейся скорости коррекции на момент времени начала формирования кинетического момента tp, определяется, например, как интегральная оценка измерений акселерометра с момента времени начала коррекции и до момента времени tp; αΣ- расчетное ускорение, получаемое КА от работающих ДО, участвующих в коррекции его орбиты.
Поиск производится η-ми шагами, каждый из которых отличается от предыдущего на Δt, т. е.

где Δt- продолжительность минимального импульса разгрузочного момента  или
или  Определив 1-ый момент времени как t'1= tp, осуществим прогноз изменений вектора
Определив 1-ый момент времени как t'1= tp, осуществим прогноз изменений вектора  на интервале (t'1, tk1) по выражению:
на интервале (t'1, tk1) по выражению:
где  главный вектор управляющего момента от всех работающих ДО без учета отключений i-ых ДО или пар ДО;
главный вектор управляющего момента от всех работающих ДО без учета отключений i-ых ДО или пар ДО;  главный вектор управляющего момента от всех работающих ДО с учетом отключений i-го ДО или включения пар ДО;
главный вектор управляющего момента от всех работающих ДО с учетом отключений i-го ДО или включения пар ДО;  главный вектор управляющего момента всех внешних возмущающих сил. Значение
главный вектор управляющего момента всех внешних возмущающих сил. Значение  известно, например, в результате тестовых включений ДО. Значение tk1 определяется следующим образом:
известно, например, в результате тестовых включений ДО. Значение tk1 определяется следующим образом:
где  измеренное значение скорости коррекции КА на момент времени t'1.
измеренное значение скорости коррекции КА на момент времени t'1.
Прогноз осуществляем с нулевыми начальными значениями по вектору  и далее суммируем спрогнозированное значение с реальными начальными условиями, полученными по выражению
и далее суммируем спрогнозированное значение с реальными начальными условиями, полученными по выражению
на момент времени t'1
Далее проверяем выполнение условия
и если оно выполняется, то tz= t'1, иначе выбираем t′2= tp+Δt и повторяем цикл расчетов на момент времени t'2 и т. д. до выполнения условия (22).
Формирование кинетического момента КА прекращается в момент завершения коррекции орбиты или по достижению временем коррекции значения tz.
Рассмотрим случай управления кинетическим моментом при коррекции орбиты геостационарного спутника связи. Предположим, что после завершения процесса коррекции орбиты КА будет иметь следующий вектор состояния в гринвичской системе координат:

где  радиус-вектор и вектор скорости КА соответственно.
радиус-вектор и вектор скорости КА соответственно.
КА должен в процессе коррекции орбиты сохранять неизменной свою ориентацию в орбитальной системе координат. Эта ориентация задается следующими углами Крылова: λY= 0; λx= 0; λz= 2700.
Предположим, что после коррекции орбиты КА должен в течение трех суток поддерживать неизменной эту же ориентацию. Решая систему уравнений (2), получим заданную область кинетического момента, в которой должен оказаться кинетический момент КА после завершения процесса коррекции орбиты. На фиг. 3, 4, 5 показан полученный в результате решения системы уравнений (2) результирующий график изменения вектора кинетического момента КА в связанной с КА системе координат в течение трех суток поддержания указанной ориентации. Из графика видно, что составляющая Gz изменяется медленно на заданном временном интервале и поэтому основные ограничения нужно вводить на две другие составляющие кинетического момента КА. Т. о. , если вектор кинетического момента в конце процесса коррекции орбиты КА будет принадлежать следующей области:
-8≤Gx≤5 Нмс
-7≤Gy≤8 Нмс
-5≤Gz≤5 Нмс,
то удастся избежать насыщения системы СГ при выполнении дальнейшей программы полета.
Блок-схема системы, реализующей предлагаемый способ управления кинетическим моментом КА в процессе коррекции его орбиты, представлена на фиг. 6, где введены следующие обозначения: 1 - блок скорости коррекции (БСК); 2 - блок датчиков внешней информации опорного базиса (БДВИ); 3 - блок определения управляющих сил и моментов (БОУСМ); 4 - блок формирования управляющих сил и моментов (БФУСМ); 5 - блок определяемых значений продолжительности импульсов ДО (БОЗПИД); 6 - блок ДО (БДО); 7 - корпус КА (ККА); 8 - блок датчиков угловой скорости (БДУС); 9 - блок датчиков линейных ускорений (БДЛУ); 10 - блок задания параметров управления КА (БЗПУКА); 13 - блок силовых гироскопов (БСГ); 14 - блок определения значений суммарного вектора кинетического момента (БОЗСВКМ); 16 - блок формирования текущего времени разгрузки СГ (БФТВРСГ); 11 - блок приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям (БППЗСВКМНУ); 12 - блок определения времени окончания режима коррекции (БОВОРК). БФУСМ 4 содержит следующие блоки, аналогичные описанным в прототипе, представленные на фиг. 7: 21 - блок выбора ДО для коррекции орбиты (БВДКО); 24 - блок формирования разгрузочного момента для системы СГ (БФРМСГ); 25 - блок определения разгрузочных моментов для системы СГ (БОРМСГ); 22 - блок выбора разгрузочного момента для системы СГ (БВРМСГ); 23 - блок выбора пары ДО для разгрузки системы СГ (БВПДРСГ). На указанной блок-схеме кроме ранее описанных блоков, аналогичных описанным в прототипе, дополнительно введены следующие: 18 - блок определения заданной области кинетического момента (БОЗОКМ); 19 - блок сравнения текущего времени коррекции орбиты КА и расчетного времени начала формирования суммарного вектора кинетического момента КА (БСТВКОРВНФСВКМ); 15 - блок сравнения параметров заданной области кинетического момента КА и суммарного вектора кинетического момента КА (БСПИОКМСВКМ); 16 - блок задания текущего времени формирования кинетического момента космического аппарата (БЗТВФКМКА); 17 - блок прогнозируемых значений суммарного вектора кинетического момента в процессе формирования суммарного вектора кинетического момента (БПЗСВКМФСВКМ), 20 - блок определения времени начала формирования кинетического момента (БОВНФКМ).
При этом выходы БСК 1 и БДВИ 2 соединены соответственно с первым и вторым выходом БОУСМ 3, а выход БОУСМ 3 соединен с первым входом БФУСМ 4. Первый выход БФУСМ 4 соединен с первым входом БОЗПИД 5, а выход БОЗПИД 5 - с входом БДО 6. В свою очередь БДО 6 соединен со вторым входом БОЗПИД 5. На корпусе КА 7 установлены БДО 6, БДУС 8 и БДЛУ 9. При этом выход БДУС 8 соединен с третьим входом БОУСМ 3, а выход БДЛУ 9 соединен с первым входом БСК 1. Первый, второй, третий и четвертый выходы БЗПУКА 10 соединены соответственно с входом БДВИ 2, вторым входом БСК 1, четвертым входом БОУСМ 3 и вторым входом БФУСМ 4.
Вход БСГ 13 соединен со вторым входом БОУСМ 3, а выход БСГ 13 - с первым входом БОЗСВКМ 14. Первый выход БОЗСВКМ 14 соединен с первым входом БСПИОКМСВКМ 15, а второй выход этого же блока - с с первым входом БППЗСВКМНУ 11 и третьим входом БСПИОКМСВКМ 15. Второй вход БОЗСВКМ 14 соединен с выходом БДУС 8. Выход БЗТВФКМКА 16 соединен с третьим входом БОЗСВКМ 14 и первыми входами БПЗСВКМФСВКМ 17 и БОВОРК 12. Первый выход БСПИОКМСВКМ 15 соединен с первым входом БЗТВФКМКА 16, а второй выход - с третьим входом БФУСМ 4. Третий выход БСПИОКМСВКМ 15 соединен с четвертым входом БФУСМ 4 и вторым входом БЗТВФКМКА 16. Второй вход БСПИОКМСВКМ 15 соединен с пятым выходом БЗПУКА 10, а четвертый вход этого же блока - с первым выходом БППЗСВКМНУ 11, пятый вход - с выходом БОЗОКМ 18, шестой вход - с выходом БСТВКОРВНФСВКМ 19.
Выход БПЗСВКМФСВКМ 17 соединен со вторым входом БППЗСВКМНУ 11. Второй вход БПЗСВКМФСВКМ 17 соединен с первым выходом БОВОРК 12, третий и четвертый входы этого же блока соединены соответственно с третьим выходом БФУСМ 4 и шестым выходом БЗПУКА 10.
Второй вход БОВОРК 12 соединен со вторым выходом БСК 1, а третий вход - со вторым выходом БФУСМ 4.
Первый вход БОЗОКМ 18 соединен с седьмым выходом БЗПУКА 10, второй - с выходом БДУС 8, третий - с выходом БДЛУ 9, четвертый - с выходом БСГ 13. Первый вход БСТВКОРВНФСВКМ 19 соединен с восьмым выходом БЗПУКА 10, второй вход БСТВКОРВНФСВКМ 19 соединен с выходом БОЗОКМ 20.
Первый вход БОВНФКМ 20 соединен с девятым выходом БЗПУКА 10, второй - с выходом БДУС 8, третий - с выходом БДЛУ 9, четвертый - с выходом БСГ 13. пятый - со вторым выходом БОВОРК 12.
Первый вход БВДКО 21 соединен с БОУСМ 3, а второй вход - с четвертым выходом БЗПУКА 10. Первый выход БВДКО 21 соединен с первым входом БФРМСГ 24 и вторым входом БОРМСГ 25. Второй выход этого же блока объединен с третьим выходом БФУСМ 4. Первый выход БФРМСГ 24 является одновременно первым выходом БФУСМ 4, а второй выход - вторым выходом БФУСМ 4. Второй вход БФРМСГ 24 соединен с выходом БВРМСГ 22. Третий вход БФРМСГ 24 соединен с четвертым входом БФУСМ 4.
Первый вход БОРМСГ 25 соединен с третьим входом БФУСМ 4, а третий вход указанного блока - с четвертым выходом БЗПУКА 10. Первый выход БОРМСГ 25 соединен со вторым входом БВРМСГ 22, а второй выход этого же блока - с первым входом БВПДРСГ 23. Первый вход БВРМСГ 22 соединен с третьим входом БФУСМ 4.
Второй вход БВПДРСГ 23 соединен с выходом БЗПУКА 10, а третий вход - с четвертым входом БФУСМ 4. Первый выход БВПДРСГ 23 соединен с первым выходом БФУСМ 4, а второй выход этого же блока - с третьим выходом БФУСМ 4.
Рассмотрим примеры реализации указанных блоков.
БСГ 13 может быть выполнен на основе двухстепенных СГ. Схема указанного блока и ее описание представлены в [3] , с. 12-14.
Блоки 11, 12, 14-25 и их функциональные связи могут быть реализованы с использованием микропроцессорной техники, например, на базе одного из процессоров трехканального исполнения ЦВМ "Электроника" МС 1201.02-02 (см. [4] ) с дополнительными контроллерами ввода-вывода.
На фиг. 8 показан пример такой реализации. При этом введены следующие обозначения: 27 - тактовый генератор (ТГ), 26 - процессор (П), 28 - дешифратор адреса (ДША), 29 - устройство ввода-вывода (УВВ), ШД - трехстабильная двухнаправленная 16-ти разрядная шина данных, ША - трехстабильная однонаправленная 16-ти разрядная шина адреса, ШУ - шина управления (10 линий сигналов управления).
Блоки 11, 12, 14-25 набраны из стандартных постоянных запоминающих устройств (ПЗУ) емкостью 2 кБайта. При этом число стандартных ПЗУ определяется объемом алгоритма решаемой в блоке задачи (см. [5] с. 115 - 117). Функциональные связи между блоками 11, 12, 14 - 25 реализованы за счет трехканального исполнения - через шины данных, адреса и управления.
Кроме указанных в прототипе связей через УВВ 29 осуществляется функциональная многоканальная связь 4, 5, 6, 7, 8, 9 выходов БЗПУКА 10 с соответствующими входами БФУСМ 4, БСПИОКМСВКМ 15, БПЗСВКМПКО 17, БСТВКОРВНФСВКМ 19, БОЗОКМ 18, БОВНФКМ 20.
Реализация указанной функциональной связи может быть осуществлена при помощи аппаратуры управляющего информационно-вычислительного комплекса (УИВК) "Стек - 30".
Через УВВ 29 осуществляются также связи второго выхода БСК 1 со вторым входом БОВОРК 12, выхода БСГ 13 с первым входом БОЗСВКМ 14, первого выхода БОУСМ 3 с первым входом БВДКО 21, выхода БДУС 8 со вторым входом БОЗСВКМ 14, связь БОЗОКМ 18 с пятым входом БСПИОКМСВКМ 15, связь БСТВКОРВНФСВКМ 19 с шестым входом БСПИОКМСВКМ 15, связь БОВНФКМ 20 со вторым входом БСТВКОРВНФСВКМ 19. Кроме того, со вторых выходов БФРМСГ 24 и БВПДРСГ 23 через УВВ 29 передается информация в БОЗПИД 5 через его первый вход. Интерфейс указанных связей достаточно подробно описан в [4] , с. 33-35.
Работает система управления следующим образом. Перед началом коррекции орбиты БЗПУКА 10 со своего седьмого выхода на первый вход БОЗОКМ 18 выдает управляющий сигнал на определение заданной области кинетического момента КА. Получив этот сигнал, БОЗОКМ 18 принимает на свои второй, третий и четвертый входы с выхода БДУС 8, выхода БДЛУ 9 и выхода БСГ 13 соответственно заданную информацию для прогноза накопления кинетического момента КА (вектор кажущегося ускорения КА, вектор угловой скорости, вектор кинетического момента СГ). С седьмого выхода БЗПУКА 10 поступает также информация, необходимая для расчета возмущающих моментов и области допустимых значений кинетического момента СГ (положение солнечных батарей, текущая ориентация КА, вектор состояния, количество работающих СГ, необходимая информация об участвующих в коррекции орбиты ДО и т. д. ). БОЗОКМ 18 осуществляет прогноз процесса коррекции орбиты и определение заданной области кинетического момента КА посредством решения системы уравнений (1) и передает по факту завершения указанного решения со своего первого выхода на пятый вход БСПИОКМСВКМ 15 параметры заданной области кинетического момента КА.
С помощью БЗПУКА 10 выбирается требуемый режим ориентации путем включения необходимого датчика, входящего в состав БДВИ 2 с помощью сигнала, передаваемого с первого выхода БЗПУКА 10 на вход БДВИ 2 и подтверждения выбора режима ориентации в БОУСМ 3 с четвертого выхода БЗПУКА 10 на первый вход БОУСМ 3. Одновременно в БСК 1 с третьего выхода БЗПУКА 10 на первый вход БСК 1 задаются параметры коррекции орбиты КА, включающие величину и направление вектора скорости коррекции. Задачу построения и поддержания ориентации решает БОУСМ 3, который содержит в себе кинематический контур системы управления движением (подробнее описание работы кинематического контура представлено, например, при описании заявки [3] на изобретение). Для этого используется информация, поступающая от БДВИ 2 и БДУС 8 на третий и четвертый входы БОУСМ 3 соответственно.
Кроме того, по началу выполнения режима коррекции орбиты со второго выхода БОУСМ 3 на второй вход БФУСМ 4 (схема БФУСМ представлена на фиг. 9, подробное описание работы приведено в прототипе) выдаются требования на формирование управляющих сил Fi. БФУСМ 4 определенным образом, описанным в способе-прототипе, формирует по своему второму выходу (в случае формирования кинетического момента в процессе коррекции орбиты либо со второго выхода БВПДРСГ 23 либо с первого выхода БФРМСГ 24 в зависимости от того, каким образом будет выполняться формирование требуемого кинетического момента) на первый вход БОЗПИД 5 сигналы, которые там усиливаются, запоминаются и транслируются с установленной продолжительностью на пусковые клапаны ДО с выхода БОЗПИД 5. В свою очередь с каждого ДО идет в БОЗПИД 5 (на его второй вход) квитанция о начале работы двигателей. Как только продолжительность работы двигателя достигнет запомненной величины, он отключается (прекращается подача управляющего сигнала на пусковые клапаны).
Одновременно с выдачей требования на формирование управляющих сил Fi с первого выхода БОУСМ 3 на первый вход БСГ 13 выдаются требования на формирование управляющих моментов. БСГ 13 формирует закон управления осями прецессии СГ (см. [3] с. 12-13) по затребованным управляющим моментам. При этом за счет измерений, проводимых в блоке синус-косинусных преобразователей углов поворота осей прецессии, входящего в состав БСГ 13, а также по известным значениям кинетических моментов роторов гиродвигателей определяется значение вектора кинетического момента системы СГ  При этом непосредственно значение
При этом непосредственно значение  определяется в БОЗСВКМ 14 по указанным измеренным значениям, поступающим на его второй вход с выхода БСГ 13. На первый вход БОЗСВКМ 14 с БДУС 8 поступает информация о значениях вектора абсолютной угловой скорости КА
определяется в БОЗСВКМ 14 по указанным измеренным значениям, поступающим на его второй вход с выхода БСГ 13. На первый вход БОЗСВКМ 14 с БДУС 8 поступает информация о значениях вектора абсолютной угловой скорости КА  В самом БОЗСВКМ 14 имеются заранее заданные значения компонент тензора инерции КА
В самом БОЗСВКМ 14 имеются заранее заданные значения компонент тензора инерции КА  В результате в нем определяется значение вектора
В результате в нем определяется значение вектора  в соответствии с последним выражением из (1).
в соответствии с последним выражением из (1).
В момент времени начала коррекции орбиты КА с девятого выхода БЗПУКА 10 на первый вход БОВНФКМ 20 выставляется требование определения времени начала формирования требуемого значения кинетического момента. Получив этот сигнал, БОВНФКМ 20 принимает на свои второй, третий и четвертый входы с выхода БДУС 8, выхода БДЛУ 9 и выхода БСГ 13 соответственно исходную информацию для прогноза накопления кинетического момента КА (вектор кажущегося ускорения КА, вектор угловой скорости, вектор кинетического момента СГ). С седьмого выхода БЗПУКА 10 поступает также информация, необходимая для расчета возмущающих моментов и области допустимых значений кинетического момента СГ (положение солнечных батарей, текущая ориентация КА, вектор состояния, количество работающих СГ, необходимая информация об участвующих в коррекции орбиты ДО и т. д. ).
БОВНФКМ 20 осуществляет прогноз процесса коррекции орбиты и накопления в течение этого процесса кинетического момента КА на интервале времени от начала коррекции орбиты до расчетного момента времени ее завершения tkη Прогноз осуществляется с нулевыми начальными значениями по вектору  согласно (4). Со второго выхода БСК 1 через второй вход БОВОРК 12 считывается значение
согласно (4). Со второго выхода БСК 1 через второй вход БОВОРК 12 считывается значение  входящее в выражение (5). Одновременно из второго выхода БФУСМ 4 на третий вход БОВОРК 12 приходит информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется aΣ. Для этого используются известные силы тяги ДО и масса КА и производится расчет tkη по выражению (5). Далее информация о значении tkη передается со второго выхода БОВОРК 12 на пятый вход БОВНФКМ 20.
входящее в выражение (5). Одновременно из второго выхода БФУСМ 4 на третий вход БОВОРК 12 приходит информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется aΣ. Для этого используются известные силы тяги ДО и масса КА и производится расчет tkη по выражению (5). Далее информация о значении tkη передается со второго выхода БОВОРК 12 на пятый вход БОВНФКМ 20.
Спрогнозированное значение  суммируем с реальными начальными условиями по кинетическому моменту
суммируем с реальными начальными условиями по кинетическому моменту  полученными на момент времени начала коррекции орбиты по (6). Если в результате моделирования в БОВНФКМ 20 выяснилось, что коррекция пройдет без насыщения системы СГ и при этом вектор кинетического момента КА в момент времени tkη не будет принадлежать заданной области, то в БОВНФКМ 20 выполняется поиск времени tp начала формирования заданного вектора кинетического момента КА.
полученными на момент времени начала коррекции орбиты по (6). Если в результате моделирования в БОВНФКМ 20 выяснилось, что коррекция пройдет без насыщения системы СГ и при этом вектор кинетического момента КА в момент времени tkη не будет принадлежать заданной области, то в БОВНФКМ 20 выполняется поиск времени tp начала формирования заданного вектора кинетического момента КА.
Поиск tp выполняют шагами по Δt (продолжительность минимального импульса момента  при условии включения пары двигателей ориентации или момента
при условии включения пары двигателей ориентации или момента  при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты). С текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента КА, рассчитанные с использованием полученных от БСГ 13 с его выхода на четвертый вход БОВНФКМ 20 значений вектора кинетического момента силовых гироскопов и имеющемуся там значению тензора инерции КА по последнему выражению (1), и до момента времени tkη прогнозируется накопление кинетического момента с учетом отключения в момент времени
при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты). С текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента КА, рассчитанные с использованием полученных от БСГ 13 с его выхода на четвертый вход БОВНФКМ 20 значений вектора кинетического момента силовых гироскопов и имеющемуся там значению тензора инерции КА по последнему выражению (1), и до момента времени tkη прогнозируется накопление кинетического момента с учетом отключения в момент времени  i-го ДО или включения пары ДО для формирования требуемого кинетического момента КА по (3).
i-го ДО или включения пары ДО для формирования требуемого кинетического момента КА по (3).
Выполняется прогноз накопления кинетического момента по вектору  согласно (4). Значение tkη определяется по (16). Спрогнозированное значение
согласно (4). Значение tkη определяется по (16). Спрогнозированное значение  суммируем с реальными начальными условиями по кинетическому моменту
суммируем с реальными начальными условиями по кинетическому моменту  полученными на момент времени tη начала прогноза по (6).
полученными на момент времени tη начала прогноза по (6).
Далее проверяется выполнение условия (7), и если оно выполняется, то  и полученное значение tp по выходу БОВНФКМ 20 передается в БСТВКОРВНФСВКМ 19 (на его второй вход). В противном случае повторяем цикл расчетов на момент времени t2 и т. д. до выполнения условия (7).
и полученное значение tp по выходу БОВНФКМ 20 передается в БСТВКОРВНФСВКМ 19 (на его второй вход). В противном случае повторяем цикл расчетов на момент времени t2 и т. д. до выполнения условия (7).
В момент времени начала коррекции БЗПУКА 10 передает со своего восьмого выхода на первый вход БСТВКОРВНФСЗКМ 19 значение времени начала коррекции, которое в процессе коррекции отслеживается и после прихода tp в БСТВКОРВНФСВКМ 19 сравнивается с ним. В момент времени, когда текущее время коррекции орбиты станет равно времени tp начала формирования заданного значения кинетического момента КА БСТВКОРВНФСВКМ 19 со своего выхода на шестой вход БСПИОКМСВКМ 15 выдает команду на начало формирования требуемого кинетического момента.
На первый вход БОЗСВКМ 14 с БДУС 8 поступает информация о значениях вектора абсолютной угловой скорости КА  В самом БОЗСВКМ 14 имеются заранее заданные значения компонент тензора инерции КА
В самом БОЗСВКМ 14 имеются заранее заданные значения компонент тензора инерции КА  В результате в нем определяется значение вектора
В результате в нем определяется значение вектора  в соответствии с последним выражением из (1). С первого выхода БОЗСВКМ 14 значения
в соответствии с последним выражением из (1). С первого выхода БОЗСВКМ 14 значения  поступают на первый вход БСПИОКМСВКМ 15. В БСПИОКМСВКМ 15 производится проверка выполнения условия (19). При этом параметры области допустимых значений кинетического момента СГ могут изменяться в зависимости от числа работающих в системе силовых гироскопов. Указанные изменения в БСПИОКМСВКМ 15 производятся при помощи БЗПУКА 10, пятый выход которого соединен со вторым входом БСПИОКМСВКМ 15.
поступают на первый вход БСПИОКМСВКМ 15. В БСПИОКМСВКМ 15 производится проверка выполнения условия (19). При этом параметры области допустимых значений кинетического момента СГ могут изменяться в зависимости от числа работающих в системе силовых гироскопов. Указанные изменения в БСПИОКМСВКМ 15 производятся при помощи БЗПУКА 10, пятый выход которого соединен со вторым входом БСПИОКМСВКМ 15.
В случае невыполнения условия (7) с первого выхода указанного блока на первый вход БФТВРПОВФКМ 16 выдается значение времени tp. Одновременно со второго выхода этого же блока на третий вход БФУСМ 4 выдается значение вектора  Как только БФТВРПОВФКМ 16 получает значение момента времени tp, он тут же формирует на своем выходе значение t'1 в соответствии с выражением (17). В свою очередь t'1 передается на третий вход БОЗСВКМ 14, на первый вход БОВОРК 12 и на первый вход БПЗСВКМПКО 17. По приходу в БОЗСВКМ 14 значения t'1 в нем происходит присвоение
Как только БФТВРПОВФКМ 16 получает значение момента времени tp, он тут же формирует на своем выходе значение t'1 в соответствии с выражением (17). В свою очередь t'1 передается на третий вход БОЗСВКМ 14, на первый вход БОВОРК 12 и на первый вход БПЗСВКМПКО 17. По приходу в БОЗСВКМ 14 значения t'1 в нем происходит присвоение  Значение вектора
Значение вектора  поступает со второго выхода БОЗСВКМ 14 на первый вход БППЗСВКМНУ 11 и на третий вход БСПИОКМСВКМ 15. В БППЗСВКМНУ 11 оно служит в качестве начального условия в выражении (21), а в БСПИОКМСВКМ 15 оно необходимо для проверки условия принадлежности кинетического момента КА допустимой области, при нахождении его в которой обеспечивается управляемость КА. Значение t'1, переданное в БПЗСВКМПКО 17, устанавливает нижнюю границу определенного интеграла, входящего в выражение (18). Оно же задает в БОВОРК 12 момент времени tk1 начала определения второй верхней границы указанного интеграла. Так, по приходу этого времени в БОВОРК 12 из второго выхода БСК 1 через второй вход БОВОРК 12 считывается значение
поступает со второго выхода БОЗСВКМ 14 на первый вход БППЗСВКМНУ 11 и на третий вход БСПИОКМСВКМ 15. В БППЗСВКМНУ 11 оно служит в качестве начального условия в выражении (21), а в БСПИОКМСВКМ 15 оно необходимо для проверки условия принадлежности кинетического момента КА допустимой области, при нахождении его в которой обеспечивается управляемость КА. Значение t'1, переданное в БПЗСВКМПКО 17, устанавливает нижнюю границу определенного интеграла, входящего в выражение (18). Оно же задает в БОВОРК 12 момент времени tk1 начала определения второй верхней границы указанного интеграла. Так, по приходу этого времени в БОВОРК 12 из второго выхода БСК 1 через второй вход БОВОРК 12 считывается значение  входящее в выражение (19), одновременно информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется aΣ. Для этого используются известные силы тяги ДО и масса КА и производится расчет tk1 по выражению (19). Далее информация о значении tk1 передается по первому выходу БОВОРК 12 на второй вход БПЗСВКМПКО 17.
входящее в выражение (19), одновременно информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется aΣ. Для этого используются известные силы тяги ДО и масса КА и производится расчет tk1 по выражению (19). Далее информация о значении tk1 передается по первому выходу БОВОРК 12 на второй вход БПЗСВКМПКО 17.
Информация о номерах ДО, первоначально участвующих в коррекции орбиты, выдается также с третьего выхода БФУСМ 4 на третий вход БПЗСВКМПКО 17 (либо со второго выхода БВДОКО 21, либо со второго выхода БВПДРСГ 23 в зависимости от того, какие ДО участвуют в коррекции орбиты и формировании кинетического момента КА). При этом каждому двигателю ставится в соответствие управляющий момент  который он создает. Причем значение указанных управляющих моментов задается в БПЗСВКМПКО 17 через четвертый его вход с шестого выхода БЗПУКА 10. Для ДО, не участвующих в управлении,
который он создает. Причем значение указанных управляющих моментов задается в БПЗСВКМПКО 17 через четвертый его вход с шестого выхода БЗПУКА 10. Для ДО, не участвующих в управлении,  По указанному каналу в БПЗСВКМПКО 17 выдаются также значения, определяющие значения возмущающих моментов
По указанному каналу в БПЗСВКМПКО 17 выдаются также значения, определяющие значения возмущающих моментов  (углы ориентации КА, положение солнечных батарей и т. д. ). С третьего выхода БФУСМ 4 на третий вход БПЗСВКМПКО 17 передаются также номера ДО для вектора
(углы ориентации КА, положение солнечных батарей и т. д. ). С третьего выхода БФУСМ 4 на третий вход БПЗСВКМПКО 17 передаются также номера ДО для вектора  По значениям
По значениям  и
и  в БПЗСВКМПКО 17 определяется
в БПЗСВКМПКО 17 определяется 

Далее  суммируется с полученным там же
суммируется с полученным там же  . Затем производится интегрирование на интервале установленных границ в соответствии с выражением (18). Полученные интегральные значения передаются с первого выхода БПЗСВКМПКО 17 на второй вход БППЗСВКМНУ 11, где производится их суммирование с начальными значениями
. Затем производится интегрирование на интервале установленных границ в соответствии с выражением (18). Полученные интегральные значения передаются с первого выхода БПЗСВКМПКО 17 на второй вход БППЗСВКМНУ 11, где производится их суммирование с начальными значениями  по (21). Полученная сумма с выхода БППЗСВКМНУ 11 передается на четвертый вход БСПИОКМСВКМ 15, где производится проверка выполнения условия (22). Если в БСПИОКМСВКМ 15 при проверке не выполняется условие (22) и выполняется условие принадлежности кинетического момента КА допустимой области, то значение tp подтверждается в БФТВРПОВФКМ 16 и повторяется рассмотренный выше цикл разгрузки СГ на момент времени t'2 и т. д.
по (21). Полученная сумма с выхода БППЗСВКМНУ 11 передается на четвертый вход БСПИОКМСВКМ 15, где производится проверка выполнения условия (22). Если в БСПИОКМСВКМ 15 при проверке не выполняется условие (22) и выполняется условие принадлежности кинетического момента КА допустимой области, то значение tp подтверждается в БФТВРПОВФКМ 16 и повторяется рассмотренный выше цикл разгрузки СГ на момент времени t'2 и т. д.
Если же в БСПИОКМСВКМ 15 при проверке выполняется условие (22) или не выполняется условие принадлежности кинетического момента КА допустимой области, то с третьего выхода БСПИОКМСВКМ 15 на четвертый вход БФУСМ 4 выдается команда на снятие режима формирования кинетического момента КА, на второй вход БФТВРПОВФКМ 16 - на прекращение режима поиска момента времени tz.
Предлагаемый способ и система управления позволяют так управлять кинетическим моментом космического аппарата в процессе коррекции орбиты КА, что при дальнейшем выполнении программы полета число насыщений системы СГ будет минимально, а, следовательно, число включений ДО для разгрузки СГ также будет минимально, а это в свою очередь приведет к уменьшению расхода рабочего тела и влиянию на орбиту КА, вызванному работой ДО.
Источники информации
1. Бранец В. Н. и др. "Способ управления космическим аппаратом, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг, система для реализации способа, блок реактивных двигателей системы. " Патент RU 2124461 С1.
2. "Способ управления космическим аппаратом с помощью реактивных исполнительных органов и система для его реализации. " Патент RU 2112716 С1.
3. Ковтун B. C. и др. "Система управления ориентацией космического аппарата с силовыми гироскопами. " Заявка 5032611/22 (012690), патент RU 2006430 C1.
4. Техническое описание. ЩИ3.059.064-02 микроЭВМ "Электроника", 1990 г.
5. Петросян О. А. и др. Схемотехника БИС ПЗУ. - М. : Радио и связь. 1987 г.
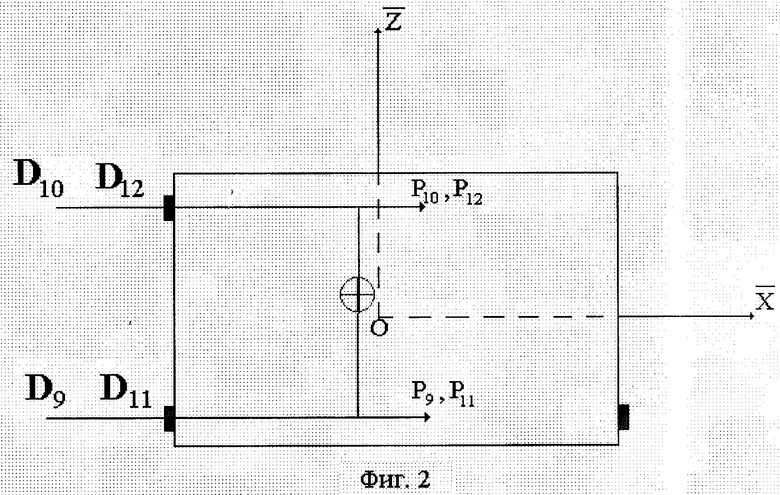
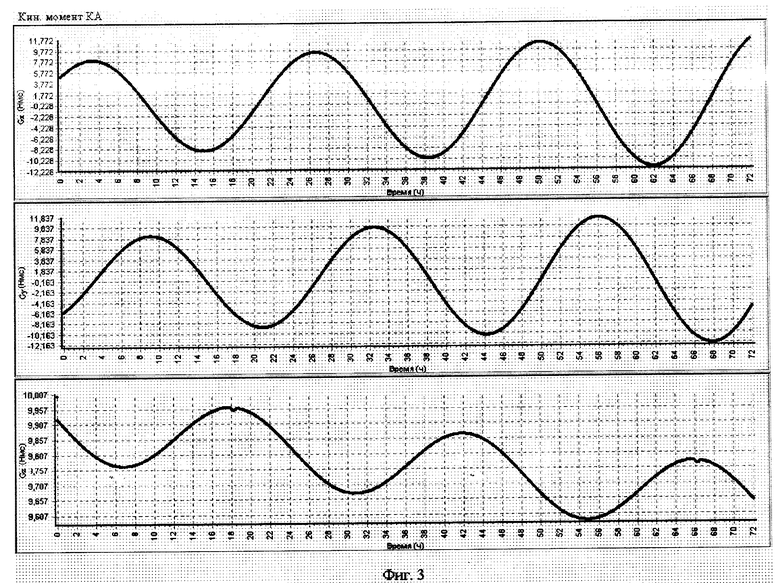
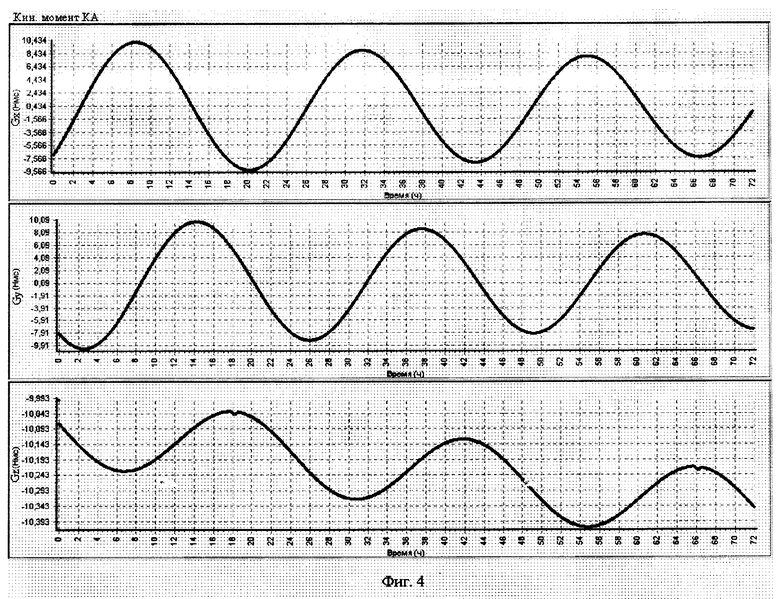
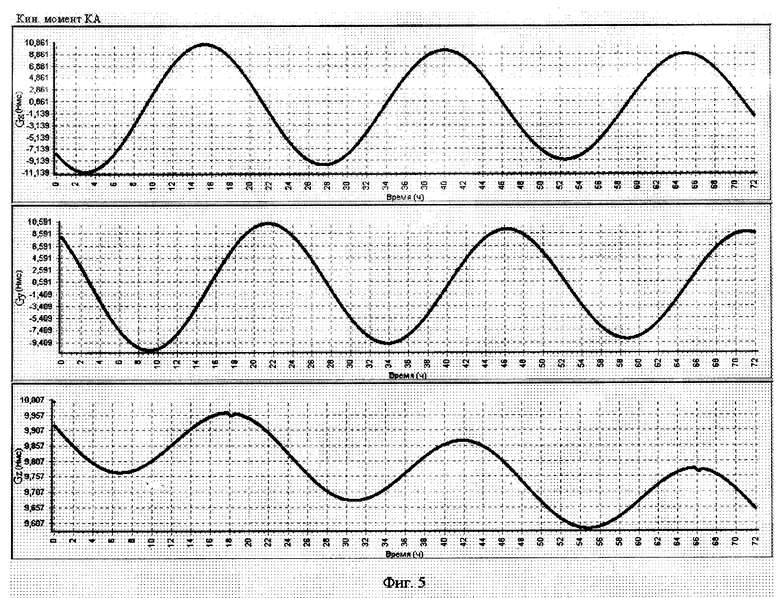
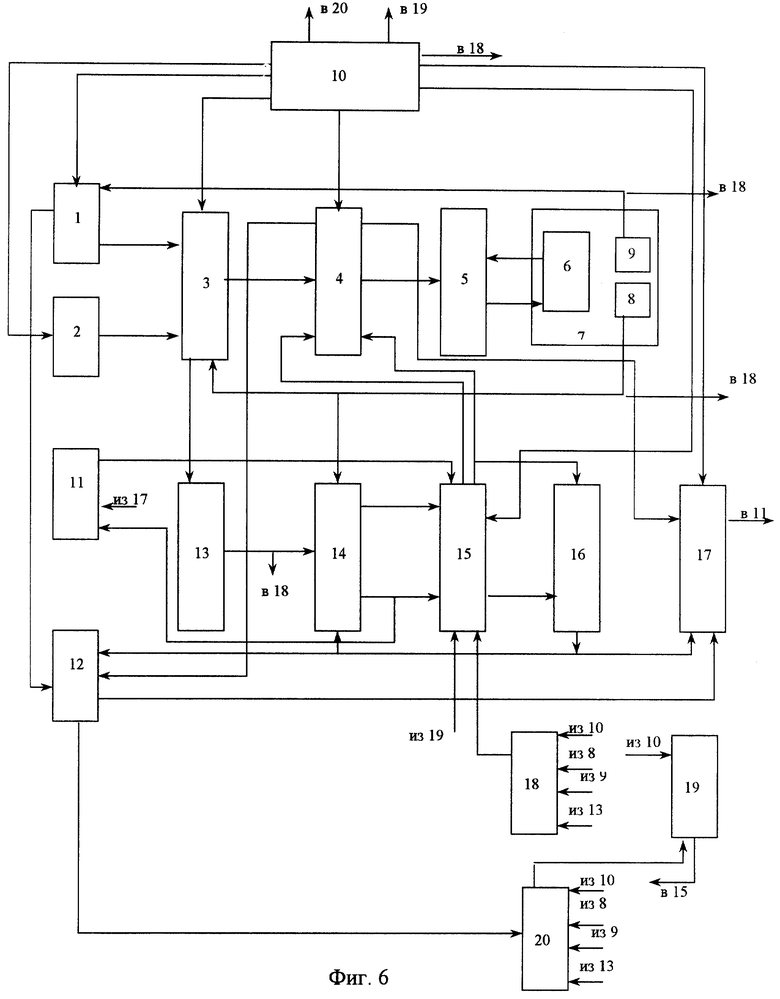
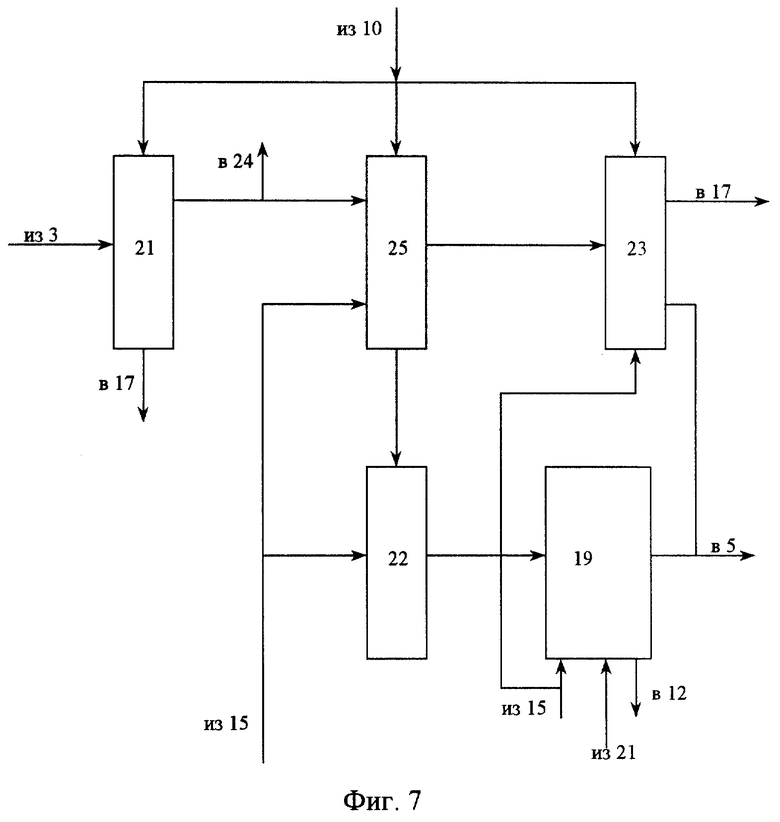
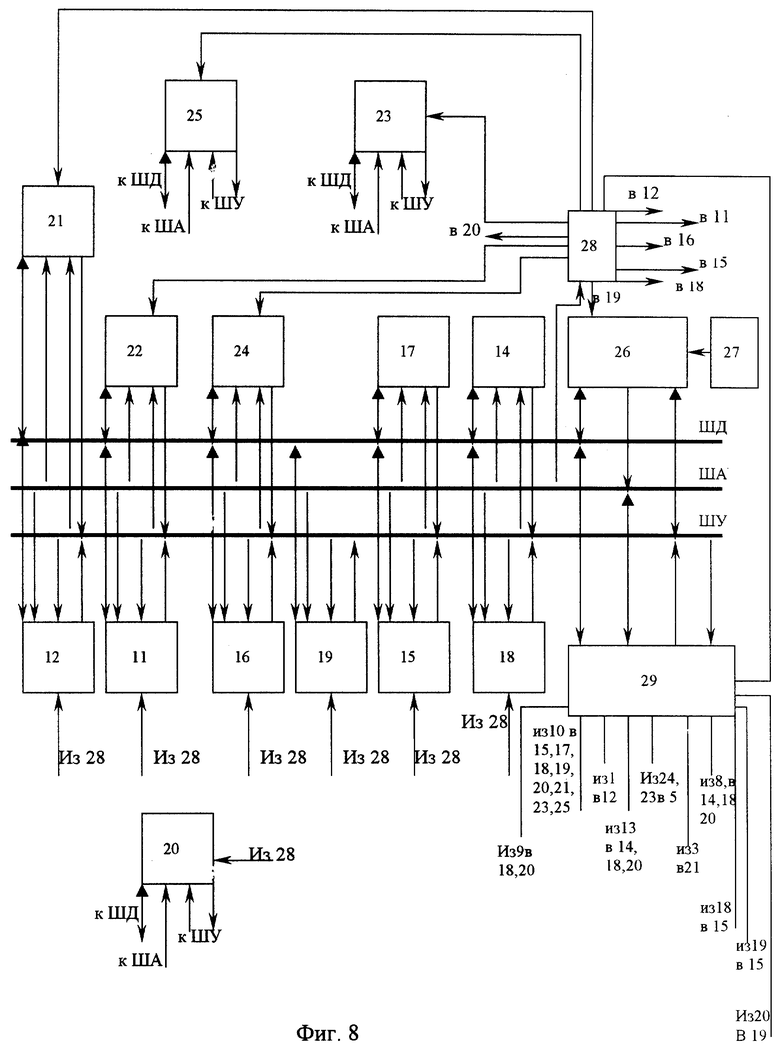
Изобретение относится к области управления ориентацией и орбитой центра масс космических аппаратов (КА). Предлагаемый способ включает определение требуемого значения скорости коррекции орбиты КА и поддержание заданной ориентации КА с помощью силовых гироскопов в процессе коррекции. При этом прогнозируют заданную область, в которой должен находится вектор кинетического момента КА в момент завершения коррекции орбиты. При отсутствии насыщения в системе гироскопов, с текущего момента коррекции шагами по времени прогнозируют накопление кинетического момента КА с учетом отключения одного из двигателей ориентации или включения их пары. Суммируют спрогнозированные на шагах значения вектора кинетического момента КА с текущего его значением. Если суммарный вектор попадает в заданную область, то с момента конца прогноза к КА прикладывают управляющие моменты путем указанного отключения одного из двигателей. Если эти моменты не являются разгрузочными, то включают ту пару двигателей, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору кинетического момента КА. При этом никакой из двигателей не отключают. Представлена система управления, содержащая необходимые блоки реализации всех операций способа. Изобретение позволяет минимизировать число включений двигателей ориентации для разгрузки силовых гироскопов и снизить тем самым расход рабочего тела и влияние на орбиту КА. 2 с. п. ф-лы, 8 ил.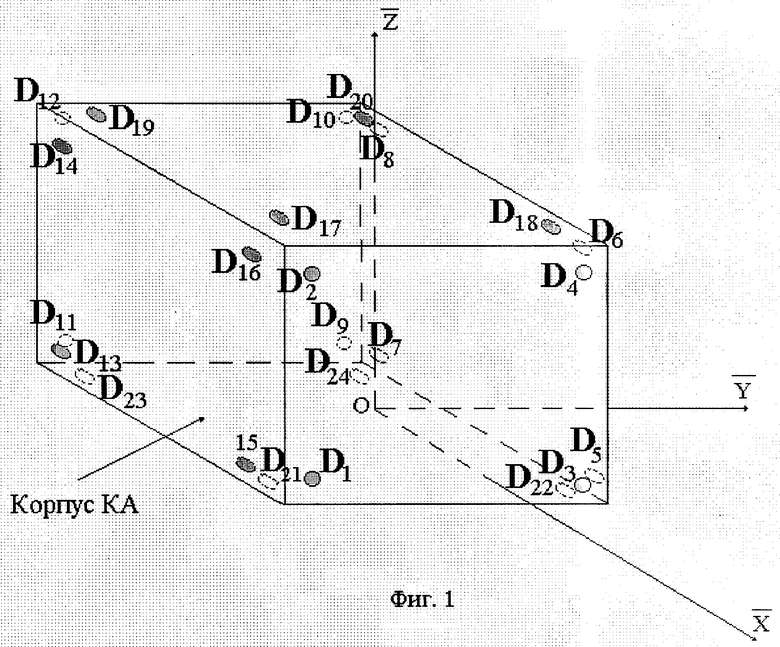
 , в текущие моменты времени (t), проверку выполнения условия принадлежности значений суммарного вектора кинетического момента космического аппарата
, в текущие моменты времени (t), проверку выполнения условия принадлежности значений суммарного вектора кинетического момента космического аппарата  области располагаемых значений вектора кинетического момента в системе силовых гироскопов, отличающийся тем, что прогнозируют заданную область (Sk), в которой должен находиться суммарный вектор кинетического момента космического аппарата
области располагаемых значений вектора кинетического момента в системе силовых гироскопов, отличающийся тем, что прогнозируют заданную область (Sk), в которой должен находиться суммарный вектор кинетического момента космического аппарата  в момент завершения процесса коррекции орбиты и при условии, что в процессе коррекции орбиты насыщения системы силовых гироскопов не происходит, с текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента космического аппарата, включая начало коррекции, η-ми шагами по Δt до момента времени tkη прогнозируют накопление кинетического момента КА
в момент завершения процесса коррекции орбиты и при условии, что в процессе коррекции орбиты насыщения системы силовых гироскопов не происходит, с текущего момента времени коррекции (tη), на которое имеются измерения вектора кинетического момента космического аппарата, включая начало коррекции, η-ми шагами по Δt до момента времени tkη прогнозируют накопление кинетического момента КА  с учетом отключения i-го двигателя ориентации или включения пары двигателей ориентации для формирования требуемого кинетического момента космического аппарата в момент времени
с учетом отключения i-го двигателя ориентации или включения пары двигателей ориентации для формирования требуемого кинетического момента космического аппарата в момент времени  η = 1,2,3,..., где Δt - продолжительность минимального импульса суммарного управляющего момента двигателей ориентации
η = 1,2,3,..., где Δt - продолжительность минимального импульса суммарного управляющего момента двигателей ориентации  при условии включения указанной пары двигателей ориентации или суммарного управляющего момента двигателей ориентации
при условии включения указанной пары двигателей ориентации или суммарного управляющего момента двигателей ориентации  при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты,
при условии отключения i-го двигателя ориентации, участвующего в коррекции орбиты,  VU - величина, определяющая заданную скорость коррекции орбиты,
VU - величина, определяющая заданную скорость коррекции орбиты,  текущее значение скорости коррекции орбиты на момент времени tη, aΣ - расчетное значение ускорения космического аппарата от двигателей ориентации, участвующих в коррекции орбиты, далее суммируют спрогнозированные значения вектора
текущее значение скорости коррекции орбиты на момент времени tη, aΣ - расчетное значение ускорения космического аппарата от двигателей ориентации, участвующих в коррекции орбиты, далее суммируют спрогнозированные значения вектора  с текущим значением суммарного вектора
с текущим значением суммарного вектора  определенным на момент начала прогноза tη, проверяют выполнение условия принадлежности полученных значений суммарного вектора кинетического момента космического аппарата заданной области Sk и если оно выполняется, то переходят к следующему η-му шагу, а если оно выполняется, то по достижению временем коррекции значения
определенным на момент начала прогноза tη, проверяют выполнение условия принадлежности полученных значений суммарного вектора кинетического момента космического аппарата заданной области Sk и если оно выполняется, то переходят к следующему η-му шагу, а если оно выполняется, то по достижению временем коррекции значения  определяют суммарное значение векторов указанных управляющих моментов
определяют суммарное значение векторов указанных управляющих моментов  от двигателей ориентации при условии отключения i-го двигателя, где i= 1, 2, . . . , n - номера двигателей ориентации, участвующих в коррекции орбиты, создают этими двигателями ориентации для системы силовых гироскопов суммарный момент, который имеет наибольшую проекцию на направление, противоположное вектору
от двигателей ориентации при условии отключения i-го двигателя, где i= 1, 2, . . . , n - номера двигателей ориентации, участвующих в коррекции орбиты, создают этими двигателями ориентации для системы силовых гироскопов суммарный момент, который имеет наибольшую проекцию на направление, противоположное вектору  при соответствующем отключенном двигателе ориентации, а в случае, когда указанные управляющие моменты
при соответствующем отключенном двигателе ориентации, а в случае, когда указанные управляющие моменты  не являются разгрузочными, для формирования требуемого кинетического момента включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору
не являются разгрузочными, для формирования требуемого кинетического момента включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору  при этом никакой из указанных i-х двигателей не отключают.
при этом никакой из указанных i-х двигателей не отключают.
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2112716C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| ИНСТРУМЕНТ ДЛЯ ПРЕССОВАНИЯ ТРУБ | 2002 |
|
RU2236316C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ | 1992 |
|
RU2006430C1 |

