Изобретение относится к области измерительной техники и может быть использовано для визуализации профилей трехмерных объектов, а также для решения задачи распознавания объектов за счет трехмерной регистрации их изображения.
Известны способы и устройства, реализующие принцип "структурированной подсветки", которые используются в трехмерной компьютерной анимации и некоторых других приложениях для регистрации формы поверхности.
Известен способ и устройство, его реализующее для бесконтактного контроля линейных размеров трехмерных объектов. Способ заключается в том, что последовательно сканируют отдельные контуры поверхности светящейся полосой, реализующей структурированную подсветку и судят о контролируемых размерах по степени искажения изображения полосы и местоположению полосы в декартовой системе координат. Устройство, реализующее способ, содержит лазер, сканер, объектив, фоторегистратор, и блок обработки информации (см., например, описание изобретения к патенту РСТ WO 98/27514 от 25.06.98 заявка РСТ /IB97/01649 от 15.12.96).
Недостатком известного устройства является низкая точность и длительное время контроля, связанные с наличием операции и блока сканирования.
Известен способ и устройство, его реализующее для контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в том, что на объект проецируется система разноцветных периодических полос. В результате в одном кадре регистрируется целиком вся попадающая в поле зрения камеры часть поверхности и судят о контролируемых размерах по степени искажений изображения множества полос и местоположению полос в декартовой системе координат. Устройство, реализующее способ бесконтактного контроля линейных размеров трехмерных объектов методом структурированной подсветки, содержит источник оптического излучения и последовательно установленные по ходу излучения транспарант, выполненный в виде слайда с изображением радужных полос, объектив, проецирующий изображение возникающей на поверхности контролируемого объекта искаженной рельефом поверхности картины радужных полос, фоторегистратор, преобразующий спроецированное объективом изображение в цифровое, и цифровой электронный блок, вход которого соединен с выходом фоторегистратора, осуществляющий пересчет фиксируемых фоторегистратором цифровых изображений в величины высот рельефа (см., например, описание изобретения к патенту РСТ WO 00/70303, РСТ/US99/70303, кл. G 01 B 11/24, 23.11.2000).
Недостатком известного устройства является низкая точность, обусловленная неоднозначным отражением подсвечивающего пучка от поверхности цветного объекта и отсутствие в отраженной картине информации о сквозных отверстиях.
Известен способ и реализующие его устройства контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в том, что на объект проецируется система полос, создаваемая либо путем подсветки когерентным излучением, содержащим спекл-структуру либо в виде системы концентрических полос, либо в виде хаотично расположенных зон, форма которых единообразна. Искаженная рельефом поверхности структурированная подсветка регистрируется при изменении длины волны излучения по меньшей мере два раза. Полученная таким образом псевдоголограмма содержит систему интерференционных полос, расстояние между которыми в разных точках соответствует высоте рельефа. Соответствующая обработка на ЭВМ совокупности данных о величине вышеуказанных расстояний позволяет судить о рельефе поверхности контролируемого объекта (см. , например, М.Франсон. Оптика спеклов. - М.: Мир, 1980, с.141-143).
Недостатком известного способа и реализующих его устройств является низкая достоверность получаемых данных о контролируемой поверхности на участках поверхности, отражение которых резко отличается от диффузного. Кроме того, сквозные отверстия таким образом также не удается идентифицировать, так как зоны структурированной подсветки характеризуются высокой степенью схожести.
Известно устройство для бесконтактного контроля линейных размеров трехмерных объектов методом структурированной подсветки, содержащее источник оптического излучения и последовательно установленные по ходу излучения транспарант, объектив, проецирующий изображение картины линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта, фоторегистратор, преобразующий спроецированное объективом изображение в цифровое, цифровой электронный блок, вход которого соединен с выходом фоторегистратора, осуществляющий пересчет фиксируемых фоторегистратором цифровых изображений в величины координат контролируемой поверхности по формуле:  где Z - значение высоты профиля поверхности контролируемого объекта в точке с координатами X,Y, пересекаемой какой-либо полосой линейчатой структуры, ΔY - величина искривления полосы в этой точке, α - угол между направлением излучения от источника оптического изображения и оптической осью объектива (см., например, описание изобретения к патенту РСТ WO 99/58930, PCT/US99/106777, кл. G 01 B 11/24, 1999 г. ). Недостатками известного устройства является высокая погрешность контроля и ограниченные функциональные возможности. Высокая погрешность измерения обусловлена тем, что при направлении на поверхность контролируемого объекта оптического изучения, промодулированного транспарантом вдоль одной координаты, возникает изображение с линейчатой структурой и искажения картины, вызванные глубокими впадинами, высокими выпуклостями и, тем более, сквозными отверстиями, невозможно идентифицировать из-за разрывов в изображении линий. Поскольку высота рельефа определяется по величине искажений линий, отсутствие в изображении собственно линий из-за наличия отверстий не позволяет распознать отверстия на контролируемой поверхности. Кроме того, при определенных значениях впадин и выпуклостей на поверхности, по искажениям полос, величина которых превышает расстояние между полосами, невозможно идентифицировать высоту рельефа и две другие координаты. Ограниченные функциональные возможности обусловлены необходимостью строго ориентировать контролируемый объект на определенном расстоянии от источника излучения.
где Z - значение высоты профиля поверхности контролируемого объекта в точке с координатами X,Y, пересекаемой какой-либо полосой линейчатой структуры, ΔY - величина искривления полосы в этой точке, α - угол между направлением излучения от источника оптического изображения и оптической осью объектива (см., например, описание изобретения к патенту РСТ WO 99/58930, PCT/US99/106777, кл. G 01 B 11/24, 1999 г. ). Недостатками известного устройства является высокая погрешность контроля и ограниченные функциональные возможности. Высокая погрешность измерения обусловлена тем, что при направлении на поверхность контролируемого объекта оптического изучения, промодулированного транспарантом вдоль одной координаты, возникает изображение с линейчатой структурой и искажения картины, вызванные глубокими впадинами, высокими выпуклостями и, тем более, сквозными отверстиями, невозможно идентифицировать из-за разрывов в изображении линий. Поскольку высота рельефа определяется по величине искажений линий, отсутствие в изображении собственно линий из-за наличия отверстий не позволяет распознать отверстия на контролируемой поверхности. Кроме того, при определенных значениях впадин и выпуклостей на поверхности, по искажениям полос, величина которых превышает расстояние между полосами, невозможно идентифицировать высоту рельефа и две другие координаты. Ограниченные функциональные возможности обусловлены необходимостью строго ориентировать контролируемый объект на определенном расстоянии от источника излучения.
Наиболее близким из известных по своей технической сущности и достигаемому результату является выбранное в качестве прототипа координат контролируемой поверхности является устройство для бесконтактного контроля линейных размеров трехмерных объектов методом структурированной подсветки, содержащее источник оптического излучения и последовательно установленные по ходу излучения транспарант, афокальную оптическую систему, проецирующую изображение картины линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта, фоторегистратор, преобразующий спроецированное объективом изображение в цифровое, цифровой электронный блок, пересчитывающий фиксируемые фоторегистратором цифровые изображения в величины координат контролируемой поверхности по формуле:  где Z - значение высоты профиля поверхности контролируемого объекта в точке с координатами X,Y, пересекаемой какой-либо полосой линейчатой структуры, ΔY - величина искривления полосы в этой точке, α - угол между направлением излучения от источника оптического изображения и оптической осью объектива. С целью обеспечения независимости взаиморасположения источника подсветки и объекта в известном устройстве предусмотрена афокальная оптическая система, состоящая из двух компонент, в частности, из двух объективов для проецирования изображения транспаранта на контролируемую поверхность, установленным за транспарантом на расстоянии, равном проекционному. Известное устройство снабжено также вторым электронным блоком сложения цифровых изображений, соединенным своим входом с выходом фоторегистратора, а выходом - со входом первого электронного цифрового блока. Транспарант выполнен в виде управляемого пространственного модулятора интенсивности оптического излучения с возможностью формировать структурированную подсветку в виде апериодической системы полос, первый электронный цифровой блок снабжен дополнительным выходом, соединенным со входом управления модулятором интенсивности оптического излучения и выполнен с возможностью управлять пространственной модуляцией интенсивности оптического излучения (см., например, заявку на выдачу патента РФ на изобретение 2001104813/28(005075) от 21.02.2001, решение о выдаче патента 16.08.2001).
где Z - значение высоты профиля поверхности контролируемого объекта в точке с координатами X,Y, пересекаемой какой-либо полосой линейчатой структуры, ΔY - величина искривления полосы в этой точке, α - угол между направлением излучения от источника оптического изображения и оптической осью объектива. С целью обеспечения независимости взаиморасположения источника подсветки и объекта в известном устройстве предусмотрена афокальная оптическая система, состоящая из двух компонент, в частности, из двух объективов для проецирования изображения транспаранта на контролируемую поверхность, установленным за транспарантом на расстоянии, равном проекционному. Известное устройство снабжено также вторым электронным блоком сложения цифровых изображений, соединенным своим входом с выходом фоторегистратора, а выходом - со входом первого электронного цифрового блока. Транспарант выполнен в виде управляемого пространственного модулятора интенсивности оптического излучения с возможностью формировать структурированную подсветку в виде апериодической системы полос, первый электронный цифровой блок снабжен дополнительным выходом, соединенным со входом управления модулятором интенсивности оптического излучения и выполнен с возможностью управлять пространственной модуляцией интенсивности оптического излучения (см., например, заявку на выдачу патента РФ на изобретение 2001104813/28(005075) от 21.02.2001, решение о выдаче патента 16.08.2001).
Недостатком устройства является низкая оперативность съема информации, обусловленная необходимостью многократно регистрировать контролируемый объект, меняя во времени пропускание транспаранта путем управления пространственной модуляцией. При решении задач распознавания время регистрации изображения объекта контроля и распознавания часто бывает ограничено. При прочих равных условиях только параллельная обработка изображений искаженной рельефом контролируемой поверхности структурированной подсветки может повысить скорость определения рельефа и обеспечить решение задачи оперативного распознавания. Однако простое увеличение числа идентичных каналов, каждый из которых конструктивно повторяет известное техническое решение принципиально невозможно, поскольку в этом случае отсутствуют признаки, позволяющие селектировать тот или иной канал от остальных.
Сущность заявляемого изобретения выражается в совокупности существенных признаков, достаточных для достижения предлагаемым изобретением технического результата, который выражается в повышении оперативности контроля линейных размеров трехмерных объектов за счет одновременной регистрации в нескольких спектральных диапазонах необходимой информации о рельефе поверхности контролируемого объекта.
Заявленная совокупность существенных признаков находится в прямой причинно-следственной связи с достигаемым результатом.
Новизна предложенного устройства усматривается в том, что оно снабжено дополнительными N-1 источниками излучения, каждый из которых отличен по спектральному диапазону излучения от остальных, N-1 транспарантами, каждый из которых отличается от остальных хотя бы на одну полосу, входящую в структурированную засветку, N-1 объективами, входящими в состав афокальных оптических систем, установленными за транспарантами по ходу излучения, N зеркалами, установленными под углом 45 угловых градусов к оптической оси объективов афокальной оптической системы, вторыми N-1 зеркалами, установленными за приемным объективом под углом 45 угловых градусов к оптической оси приемного объектива, N-1 вторичными приемными объективами, каждый из которых установлен за каждым из вторых N-1 зеркал и формирует совместно с приемным объективом изображение картин линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта, N-1 фоторегистраторами, каждый из которых имеет область спектральной чувствительности, совпадающую со спектральным диапазоном излучения одного из N-1 источников излучения, N-1 вычислительными цифровыми электронными блоками, электронный блок сложения изображений выполнен с числом входов, равным числу вычислительных цифровых электронных блоков, каждый из входов электронного блока сложения изображений соединен с выходом каждого вычислительного цифрового электронного блока, а число N определяется по формуле N= Log2(L), где L - число пар пикселей в строке фоторегистратора.
Сравнение заявленного технического решения с прототипом позволило установить соответствие его критерию "новизна", так как оно не известно из уровня техники.
Предложенное устройство является промышленно применимым существующими средствами, так как его реализация не требует создания новых элементов, материалов и технологий, поскольку состоит из компонент, изготавливаемых серийно, и соответствует критерию "изобретательский уровень", кроме того, оно явным образом не следует из уровня техники, при этом из последнего не выявлено каких-либо элементов и связей между элементами, характеризуемых отличительными от прототипа существенными признаками, направленных на достижение указанного технического результата. Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
На фиг.1 изображена функциональная схема устройства. Многоканальный блок 1 источников структурированной подсветки формирует множество отличных друг от друга изображений апериодических линейчатых структур в N спектральных диапазонах на поверхности регистрируемого объекта. Многоканальный блок 2 регистрации и обработки изображений расположен таким образом, чтобы регистрировать изображение структурированной подсветки под некоторым углом α к оптической оси источника 1 структурированной подсветки. В блоке 2 осуществляется вычисление и хранение значений координат контролируемой поверхности.
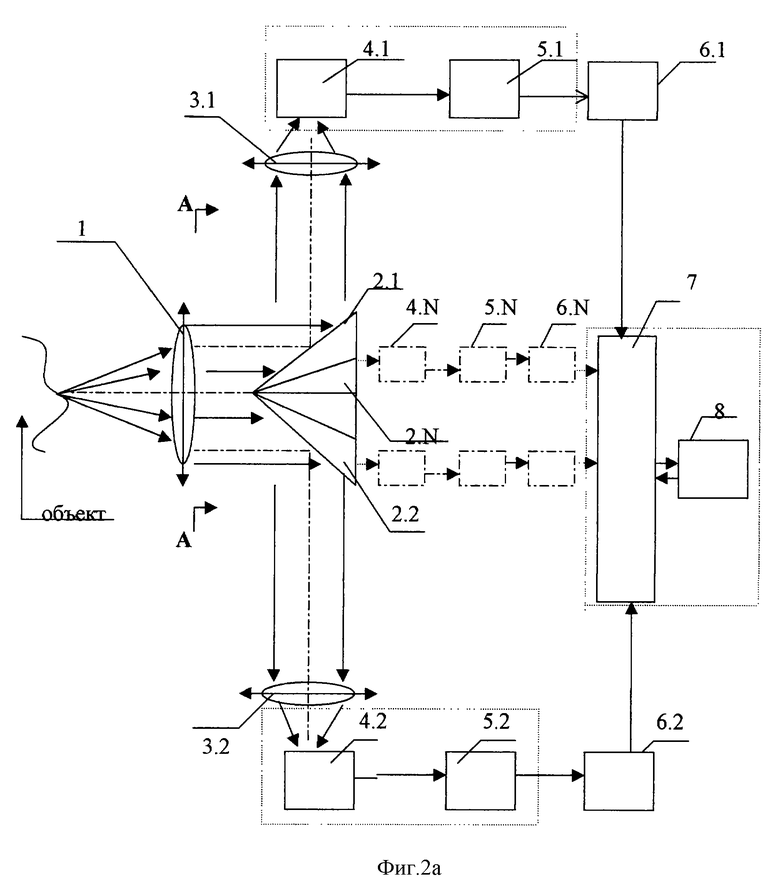
На фиг.2 изображена принципиальная схема многоканального блока 2 (фиг.1) регистрации и обработки изображений. Приемный объектив 1 расположен на проекционном расстоянии от объекта. Светоделители 2.1-2.N, образующие в совокупности многогранную пирамиду, расположены за приемным объективом 1 под углом 45 угловых градусов к оптической оси объектива по ходу лучей. Дополнительные объективы 3.1-3. N расположены соответственно в каждом из образованном светоделителями 2.1-2. N каналов и проецируют изображения искаженной поверхностью объекта структурированной подсветки на каждую из ТВ-камер, каждая из которых установлена в соответствующем из N каналов, образованных светоделителями 2.1-2.N. Выходы каждой из ТВ-камер соединены со входами каждого из аналого-цифровых преобразователей (АЦП), преобразующих зарегистрированное изображение в цифровой код. ТВ-камеры в совокупности с АЦП образуют фоторегистраторы с цифровым выходом. Сигнальные процессоры 6.1-6.N являются конкретной реализацией вычислительных электронных цифровых блоков и соединены своими входами с выходами АЦП 5.1-5.N, т.е. с выходами фоторегистраторов. Центральный процессор 7 соединен своим входом с выходами сигнальных процессоров 6.1-6. N. Оперативное запоминающее устройство 8 хранит каждое из зарегистрированных фоторегистраторами изображений структурированной засветки для параллельно-последовательной обработки в центральном процессоре 7. Центральный процессор 7 совместно с оперативным запоминающим устройством 8 образуют электронный блок сложения изображений.
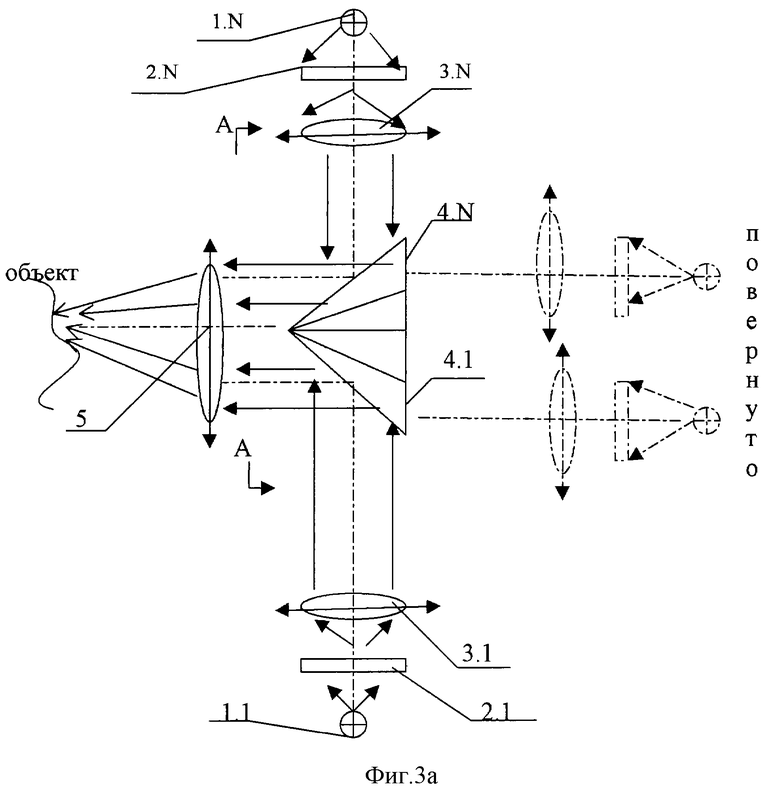
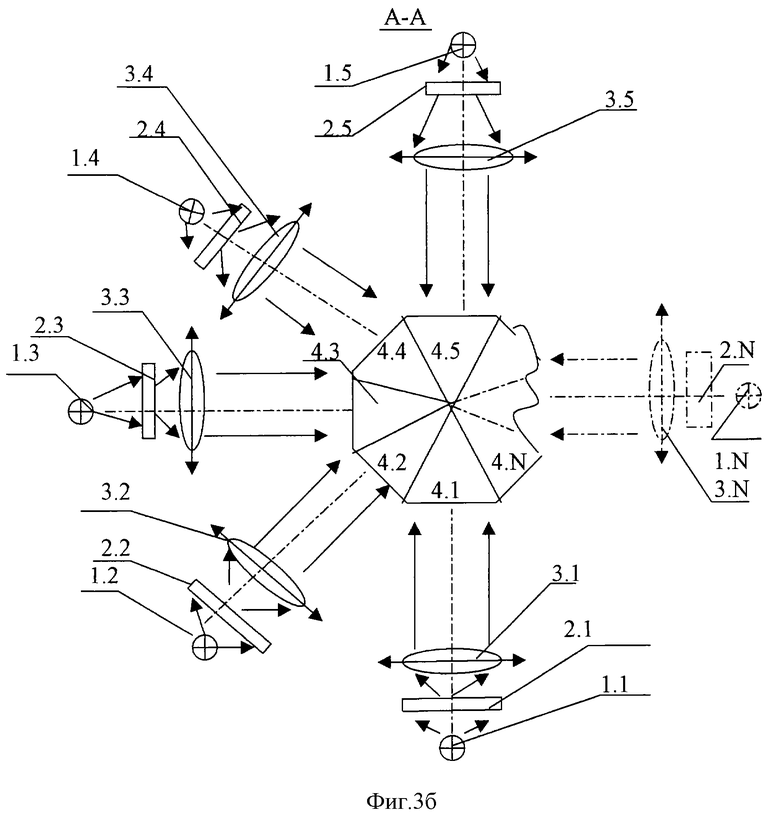
На фиг. 3 показана принципиальная схема блока 1 (фиг.1) многоканальных источников структурированной подсветки. Основной объектив 5 афокальной системы расположен на проекционном расстоянии от объекта и формирует изображение структурированной подсветки на поверхности объекта. Светоделители 4.1-4.N расположены перед основным объективом 5. Объективы 3.1-3.N расположены по ходу лучей перед каждым из соответствующих светоделителей 4.1-4.N. Транспаранты 2.1-2. N установлены в предметной плоскости афокальной оптической системы, образованной объективами 3.1-3.N и объективом 5 и выполнены в виде кодовых масок с линейчатой апериодической структурой. Разноцветные источники 1.1-1. N излучения осуществляют подсветку каждого из транспарантов 2.1-2.N каждый в отдельном спектральном диапазоне, отличном от остальных.
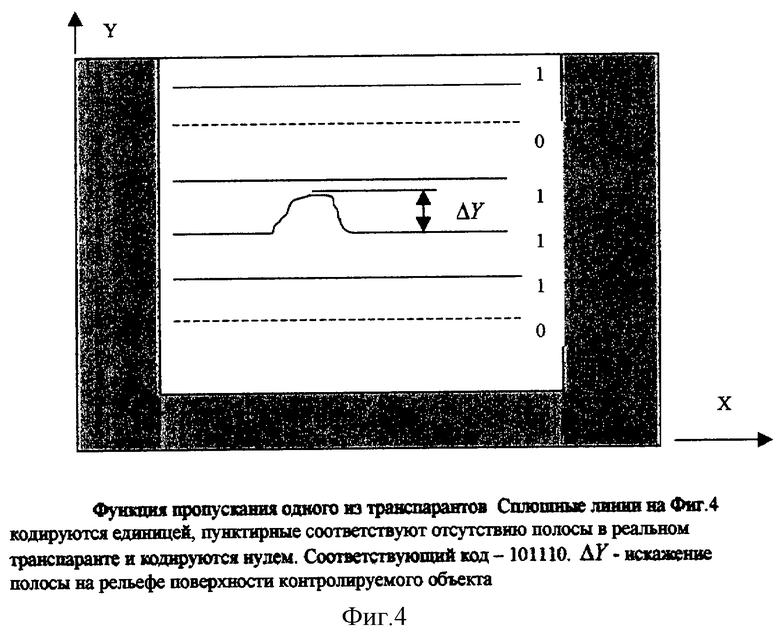
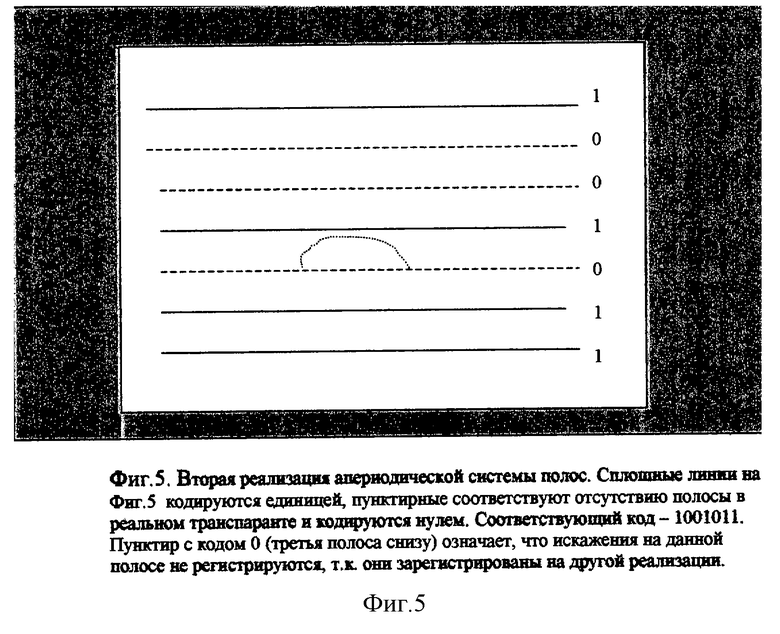
На фиг.4-5 показаны варианты выполнения кодовых масок, образующих транспаранты 2.1-2.N.
Устройство работает следующим образом. Источники 1.1-1. N излучения подсвечивают транспаранты (фиг.3) 2.1-2.N в разных спектральных диапазонах. Изображения транспарантов (фиг. 3) 2.1-2.N проецируются оптическими системами, образованными объективами 3.1-3.N, светоделителями 4.1-4.N и основным объективом 5 на поверхность объекта.
Неоднородности профиля регистрируемого объекта определяются с помощью многоканального блока 2 регистрации и обработки изображений (фиг.1) следующим образом. Изображение искаженной профилем объекта структурированной подсветки проецируется оптическими системами (фиг.2), состоящими из основного объектива 1, светоделителей 2.1-2.N, объективов 3.1-3.N на ТВ-камеры 4.1-4. N, входящие в состав фоторегистраторов. Благодаря тому, что спектральные чувствительности каждого из N фоторегистраторов и спектральные диапазоны каждого из N источников излучения, структурированной подсветки полностью идентичны, одни и те же изображения искажений структурированной подсветки регистрируются в разных каналах, причем определенному каналу подсветки соответствует один и только один канал блока регистрации и обработки изображения.
Таким образом, одно и то же изображение искажений структурированной подсветки, образованных неоднородностями профиля поверхности объекта, от разных модификаций кодовых масок транспарантов 2.1-2.N (фиг.3) в разных спектральных диапазонах Δλ1, Δλ2,...,ΔλN, однозначно регистрируются в каждом из каналов блока регистрации и обработки изображения.
Следовательно, при одной экспозиции регистрируемого объекта регистрируются N изображений искаженной поверхностью объекта структурированной подсветки в разных спектральных диапазонах и при разных реализациях апериодической системы полос, формирующих структурированную подсветку. Каждый фоторегистратор формирует цифровое изображение одной и только одной реализации апериодической системы полос, поскольку настроен на спектральный диапазон, отличный от остальных.
Каждый из сигнальных процессоров 6.1-6.N воспринимает и обрабатывает одну и только одну реализацию апериодической системы полос, и преобразует ее в соответствующую последовательность единиц и нулей, кодирующую последовательность полос в структурированной подсветке, сформированной в соответствии с функциями пропускания транспарантов 2.1-2.N (то есть -"1" линия есть, "0" - линии нет).
В оперативном запоминающем устройстве 8, которое совместно с центральным процессором 7 образует электронный блок сложения изображений (фиг.2) формируется суммарная картина линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта (см. фиг. 4). одновременно в центральном процессоре 7 формируется код, полученный суммированием кодовых последовательностей, соответствующих кодам каждой функции пропускания транспарантов 2.1-2.N. При этом, например, сумме двух единиц (т.е. изображений двух линий соответствует код "11"), а сумме изображений линии и пробела - коды "10", либо "01", и, одновременно окончательно определяются значения координат контролируемой поверхности путем суммирования результатов, полученных в блоках 6.1-6.N. Таким образом, каждая линия (полоса) в цифровом (бинарном) изображении линейчатой структуры, возникающего после сложения вышеуказанных изображений в процессоре, кодируется номером в виде двоичного кода.
Поскольку расстояния между полосами, образующими структурную подсветку, в зарегистрированной картине не повторяются, при обработке изображения в цифровом электронном блоке каждая полоса, искаженная рельефом поверхности контролируемого объекта, однозначно идентифицируется по своему коду (номеру), что, в свою очередь, делает возможным однозначно вычислять высоту рельефа и соответствующую пару координат. Благодаря тому, что обработка изображений в каждом из N каналов происходит одновременно, в N раз повышается скорость контроля. В тоже время каждый из N каналов не идентичен остальным, поскольку отличается спектральным диапазоном излучателя и, соответственно, спектральной чувствительностью фоторегистратора.
Данное предложение может с успехом использоваться в технологических процессах формообразования объектов сложной формы (лопатки турбин и т.п). Кроме того, оно может использоваться в различных приложениях компьютерной трехмерной графики, а также в системах охранной сигнализации.
Предложенное техническое решение реализуемо на сегодняшнем уровне техники и не требует для своей реализации разработки новых технологий. Телекамеры, входящие в состав предложенного технического решения, реализуются на приборах с зарядовой связью (ПЗС), АЦП, сигнальные процессоры, процессор (часть микро-ЭВМ), оперативное запоминающее устройство - неизменные компоненты современной цифровой микроэлектроники.
Литература
1. Техническое зрение роботов. /Под. ред. А.Пью, пер. с англ. - М.: Машиностроение, 1987. С.56-57.
2. М.Франсон. Оптика спеклов. - М.: Мир, 1980, с. 141-143.0
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185598C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199717C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185599C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2006 |
|
RU2316796C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов | 2021 |
|
RU2772088C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |

Устройство для бесконтактного контроля линейных размеров трехмерных объектов предназначено для оперативного определения профиля поверхности и может применяться для решения задач распознавания. Обеспечивает параллельно-последовательную обработку и регистрацию трехмерных изображений благодаря наличию N разноцветных источников оптического излучения, N транспарантов, выполненных в виде апериодических линейчатых структур, N афокальных оптических систем для проецирования изображения транспаранта на контролируемую поверхность, приемного объектива, формирующего совместно с N дополнительными изображение картины, возникающей на поверхности контролируемого объекта, N фоторегистраторов, преобразующих сформированное приемным объективом изображение в цифровое, каждый в своем спектральном диапазоне, N вычислительных цифровых электронных блоков, пересчитывающих цифровые изображения в величины координат контролируемой поверхности, и электронного блока сложения цифровых изображений. Число N определяется по формуле N=Log2(L), где L - число пар элементов разрешения в строке фоторегистратора. Каждая полоса из подсветки, искаженная рельефом поверхности контролируемого объекта, однозначно идентифицируется, что, в свою очередь, делает возможным однозначно вычислять высоту рельефа и соответствующую пару координат. Параллельно-последовательная обработка изображений, разделенных по N спектральным диапазонам, обеспечивает повышение скорости контроля. 5 ил.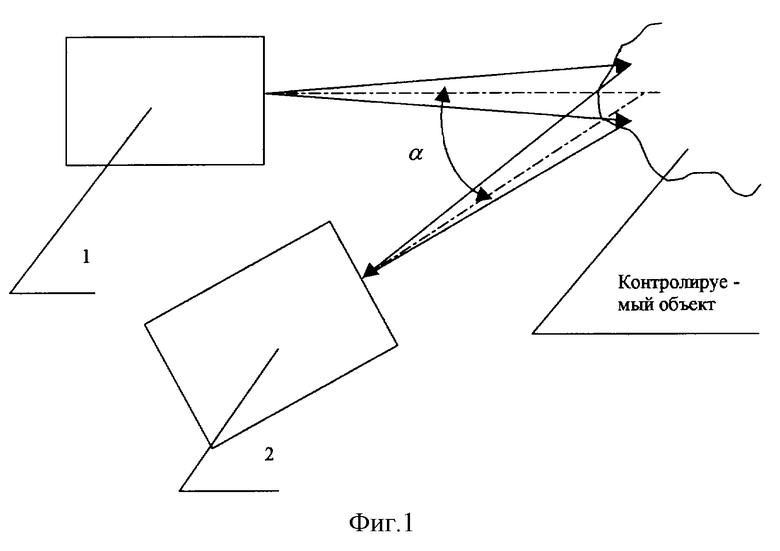
Устройство для бесконтактного контроля и распознавания поверхностей трехмерных объектов методом структурированной подсветки, содержащее источник оптического излучения и последовательно установленные по ходу излучения транспарант, выполненный с возможностью формирования апериодической линейчатой структуры полос, афокальную оптическую систему для проецирования изображения транспаранта на контролируемую поверхность, приемный объектив, формирующий изображение картины линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта, фоторегистратор, преобразующий сформированное приемным объективом изображение в цифровое, вычислительный цифровой электронный блок, пересчитывающий фиксируемые фоторегистратором цифровые изображения в величины координат контролируемой поверхности по формуле
где Z - значение высоты профиля поверхности контролируемого объекта в точке с координатами X, Y, пересекаемой какой-либо полосой линейчатой структуры;
ΔY - величина искривления полосы в этой точке;
α - угол между направлением излучения от источника оптического изображения и оптической осью объектива,
электронный блок сложения цифровых изображений, отличающееся тем, что оно снабжено дополнительными N-1 источниками излучения, каждый из которых отличен по спектральному диапазону излучения от остальных, N-1 транспарантами, каждый из которых отличается от остальных хотя бы на одну полосу, N-1 объективами, установленными за транспарантами, N-1 зеркалами, установленными под углом 45 угл. град. к оптической оси каждого из N-1 объектива перед второй компонентой афокальной оптической системы, вторыми N-1 зеркалами, установленными за приемным объективом под углом 45 угл. град. к оптической оси приемного объектива, N-1 вторичными приемными объективами, каждый из которых установлен за каждым из вторых N-1 зеркал и формирует совместно с приемным объективом изображение картин линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта, N-1 фоторегистраторами, каждый из которых имеет область спектральной чувствительности, совпадающую со спектральным диапазоном излучения одного из N-1 источников излучения, N-1 вычислительными цифровыми электронными блоками, электронный блок сложения изображений выполнен с числом входов, равным числу вычислительных цифровых электронных блоков, каждый из входов электронного блока сложения изображений соединен с выходом каждого вычислительного цифрового электронного блока, а число N определяется по формуле N=Log2(L), где L - число пар элементов пространственного разрешения фоторегистратора.
| WO 00/70303, 23.11.2000 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2105265C1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

