Изобретение относится к сельскохозяйственному машиностроению, в частности к подъемным средствам, и может быть использовано для погрузочно-разгрузочных, монтажно-демонтажных, строительных, ремонтных, технологических, вспомогательных и подсобных работ в агропромышленном комплексе.
Известен сельскохозяйственный манипулятор, содержащий плоское основание с выносными опорами, закрепленную на основании с возможностью поворота вокруг оси опорно-поворотную колонку, на которой шарнирно смонтированы коренная секция шарнирно-сочлененной стрелы и гидроцилиндры ее привода, механизм поворота колонки, рукоять с грузозахватным крюком и соединенные с тягами гидронавески трактора посредством пальцев проушины, смонтированные на тыльной стороне основания (см. Навесной манипулятор "Волгоградский" /В.М. Герасун, В. И. Пындак, А.Ф. Рогачев. - Информ. листок Волгоградского ЦНТИ N 230-97. - Волгоград. - 1997. - 4с.).
К недостаткам описанного манипулятора относится невозможность агрегатирования с тракторами класса тяги 1,4; 2,0; 5,0 и 6,0. Упомянутый манипулятор навешивается только на гусеничные трактора класса тяги 3,0 моделей ДТ-175С, ДТ-175М, ДТ-75Н, ДТ-75МЛ АООТ "Волгоградский тракторный завод" и трактор Т-150 Харьковского тракторного завода Республики Украина. При современной цене одного литра дизельного топлива для двигателей базовых тракторов с агрегатированными навесными манипуляторами выполнение приведенного выше перечня работ становится экономически невыгодно как для мелких крестьянских (фермерских) хозяйств, так и для крупных специализированных хозяйств (ОАО, КСП ЗАО и др.). Это обусловлено несовершенством проушин и пальцев навески манипуляторов, обеспечивающих агрегатирование (соединение) с ограниченным набором сельскохозяйственных транспортно-энергетических средств.
Известен также сельскохозяйственный погрузочно-транспортный агрегат, содержащий трактор, который тягами навесной системы соединен с кронштейнами подвески навесного манипулятора, снабженного опорами, колонкой, механизмом ее поворота, стрелой, рукоятью, грузозахватным крюком, силовыми цилиндрами стрелы и рукояти и прицепной грузовой платформой, в котором прицепная грузовая платформа соединена с возможностью сцепки быстроразъемной шпилькой с тяговым крюком манипулятора, при этом тяговый крюк смонтирован в полости горизонтального бруса колонки, связанной с рамой вертикальной осью и механизмом поворота (RU патент N 2150813 С1, МПК A 01 D 90/00, B 60 P 1/54. Сельскохозяйственный погрузочно-транспортный агрегат /Н.Г. Кузнецов, А.М. Салдаев, Г.А. Салдаев, А.Ф. Рогачев. Заявлено 09.03.1999, опубликовано 20.06.2000).
Сельскохозяйственный манипулятор из упомянутого агрегата принят в качестве ближайшего аналога, имеющего следующие общие существенные признаки: плоское основание с выносными опорами, проушины с пальцами для соединения с тягами гидронавески трактора, опорно-поворотную колонку с шарнирно-сочлененной стрелой и грузозахватным средством.
Недостатком описанного манипулятора является сложность переналадки его при агрегатировании в полевых условиях с тракторами сельскохозяйственного профиля различного класса тяги.
Сущность изобретения заключается в следующем.
Задача, на решение которой направлено заявляемое изобретение, - сокращение времени переналадки и расширение функциональных возможностей манипуляторов при агрегатировании с сельскохозяйственными тракторами различного класса тяги.
Технический результат - снижение трудозатрат при выполнении различных подъемно-транспортных работ в агропромышленном комплексе и себестоимости производимой продукции.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном сельскохозяйственном манипуляторе, содержащем плоское основание с выносными опорами и проушинами с пальцами для соединения с тягами гидронавески трактора, опорно-поворотную колонку с шарнирно-сочлененной стрелой и грузозахватным средством, согласно изобретению каждая проушина выполнена Е-образной формы с установленными в ее отверстиях с возможностью монтажа, фиксации и демонтажа взаимно сопрягаемыми полыми пальцами меньшего и большего диаметров, снабженными фиксатором взаимного положения, выполненным в виде пары диаметрально ориентированных штифтов, смонтированных во внутренней полости пальца большего диаметра, и U-образных байонетовых пазов, выполненных на внешней поверхности заходной части пальца меньшего диаметра, при этом он снабжен средством для монтажа, фиксации и демонтажа, взаимно сопрягаемых полых пальцев, выполненным в виде комплекта приспособлений, включающего смонтированные на резьбовой шпильке распорную втулку, шаровой слой и шаровую опору с воротком, при этом внутренняя полость пальца большего диаметра выполнена с резьбовым участком для ввинчивания распорной втулки и с возможностью ввода со стороны резьбового участка пальца меньшего диаметра, а внутренняя полость пальца меньшего диаметра имеет резьбовой участок для ввинчивания шпильки.
На фиг. 1 изображен сельскохозяйственный манипулятор в агрегате с гусеничным трактором класса тяги 3,0, вид слева;
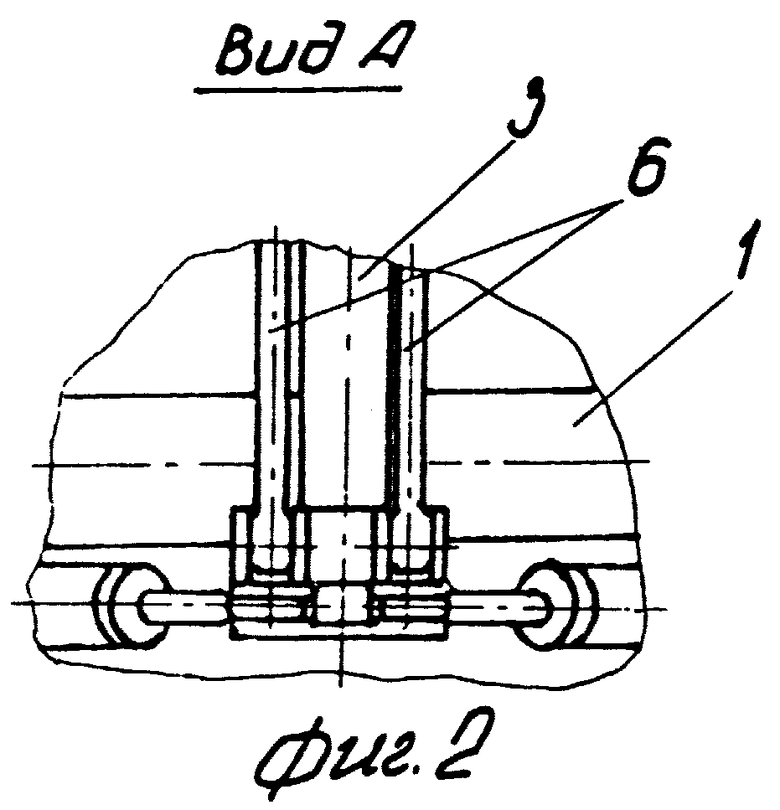
на фиг. 2 - вид А на фиг. 1, положение на основании манипулятора силовых гидроцилиндров механизма поворота опорно-поворотной колонки с шарнирно-сочлененной стрелой и грузозахватным средством;
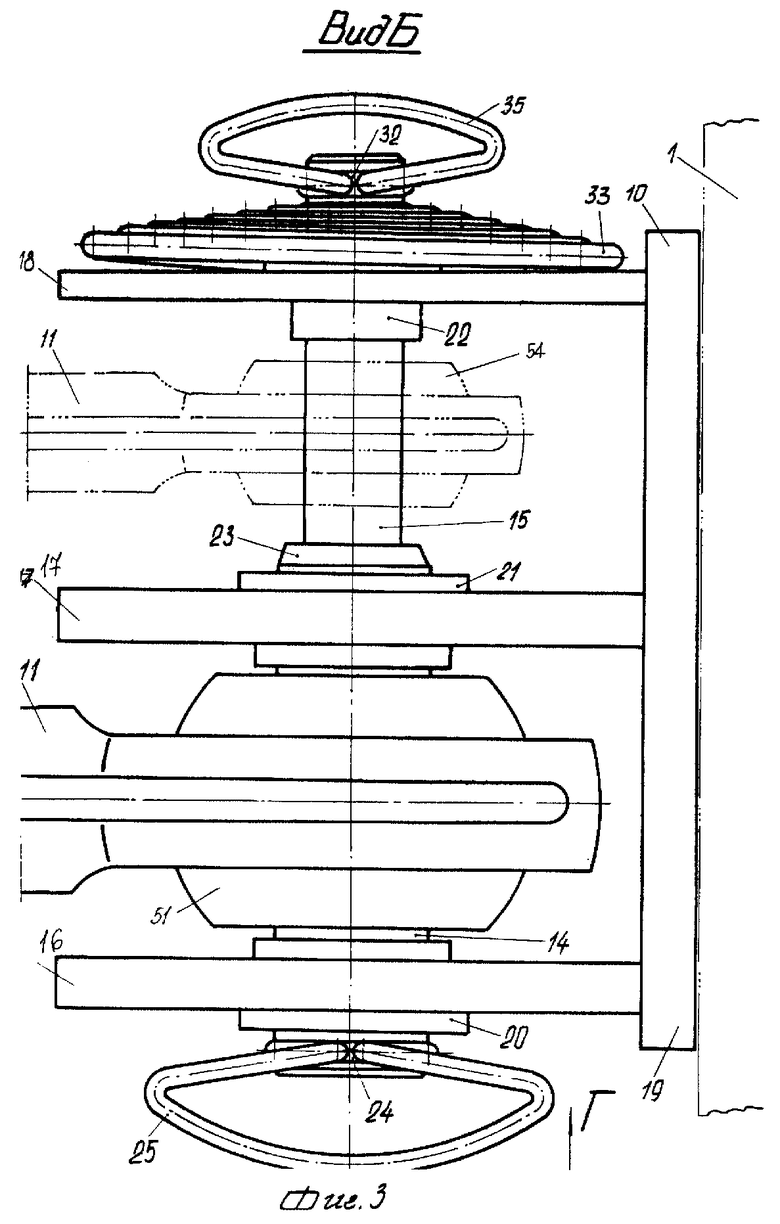
на фиг. 3 - вид Б на фиг. 1, левая проушина Е-образной формы плоского основания со смонтированными в ее соосных ступенчатых отверстиях разновеликими полыми взаимно сопрягаемыми пальцами;
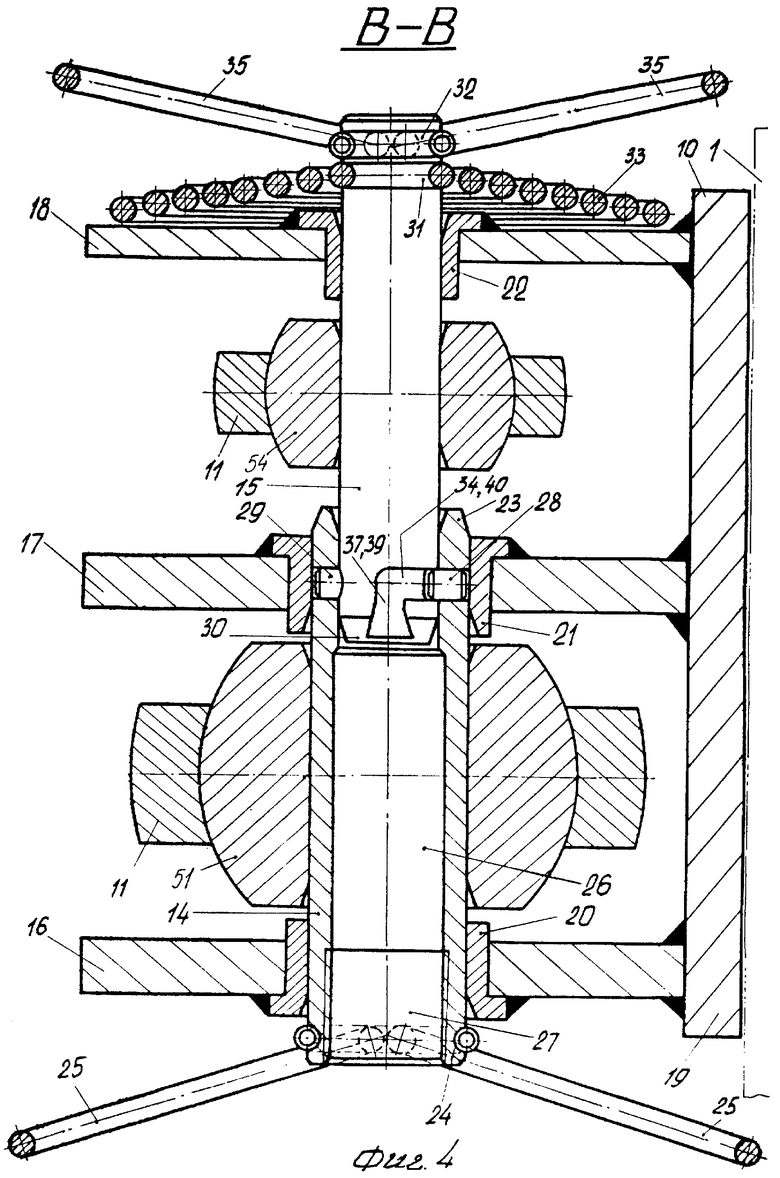
на фиг. 4 - сечение В-В на фиг. 1, горизонтальное сечение левой проушины с установленными в ней разновеликими пальцами, рабочее положение;
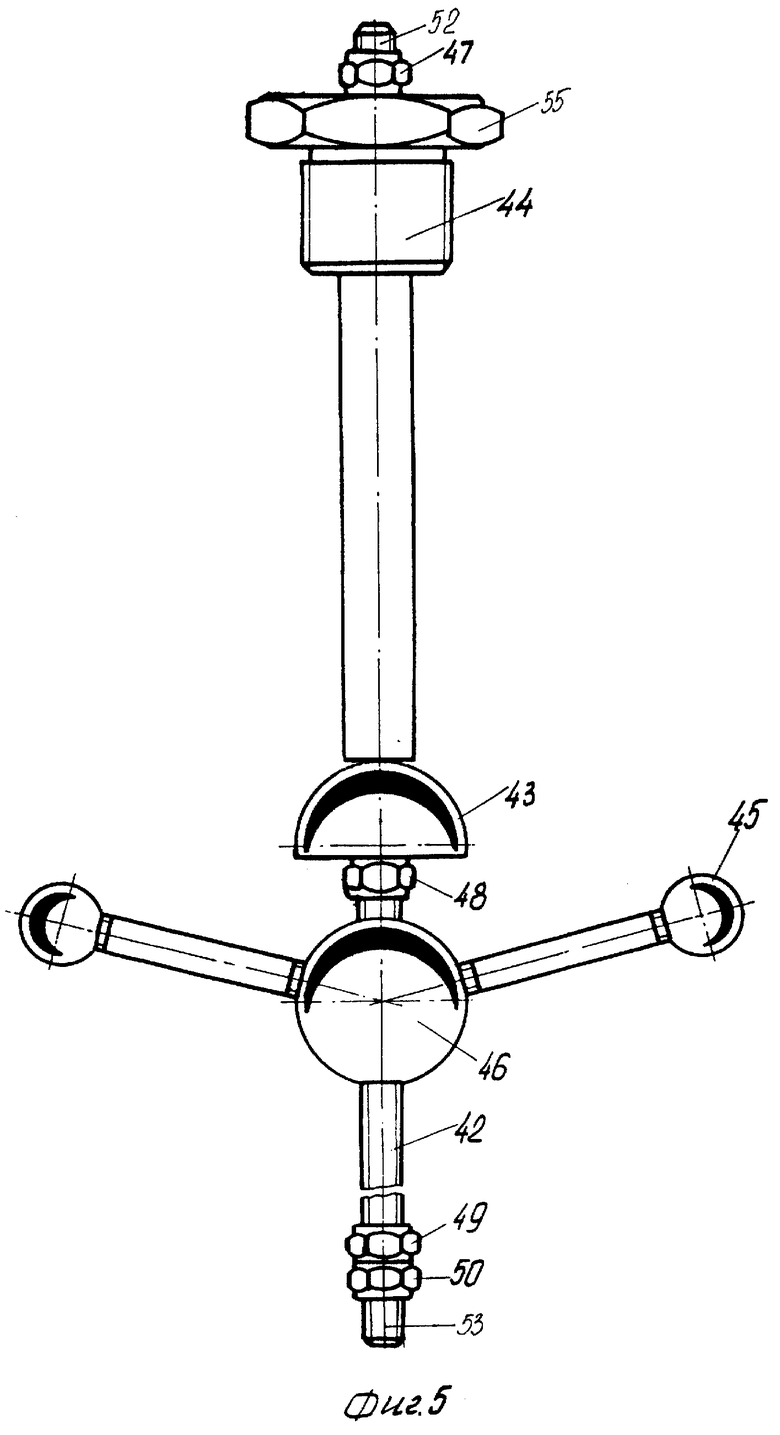
на фиг. 5 представлено средство для монтажа, фиксации и демонтажа взаимно сопрягаемых полых пальцев, выполненное в виде комплекта приспособлений, включающего смонтированные на резьбовой шпильке распорную втулку, шаровой слой и шаровую опору с воротком и крепежные элементы;
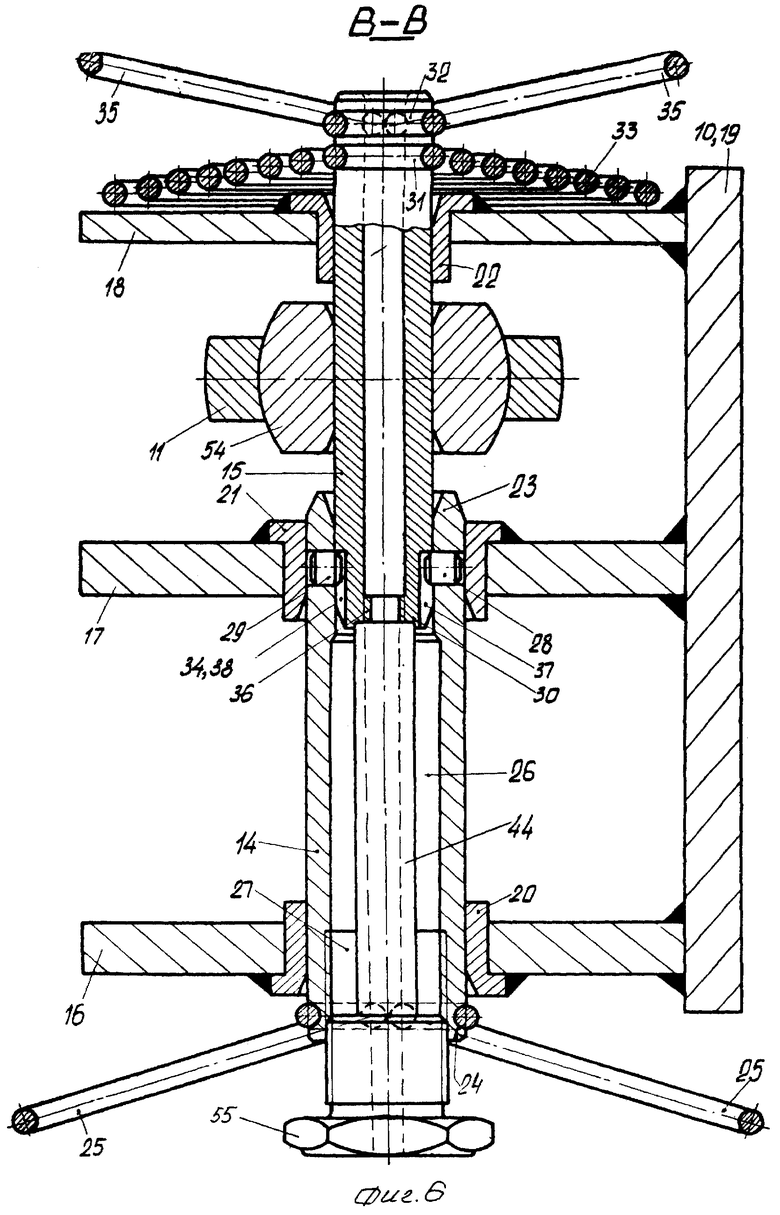
на фиг. 6 - сечение В-В на фиг. 1, изображен процесс извлечения пальца меньшего диаметра из левой проушины при агрегатировании с тракторами меньшего класса тяги;
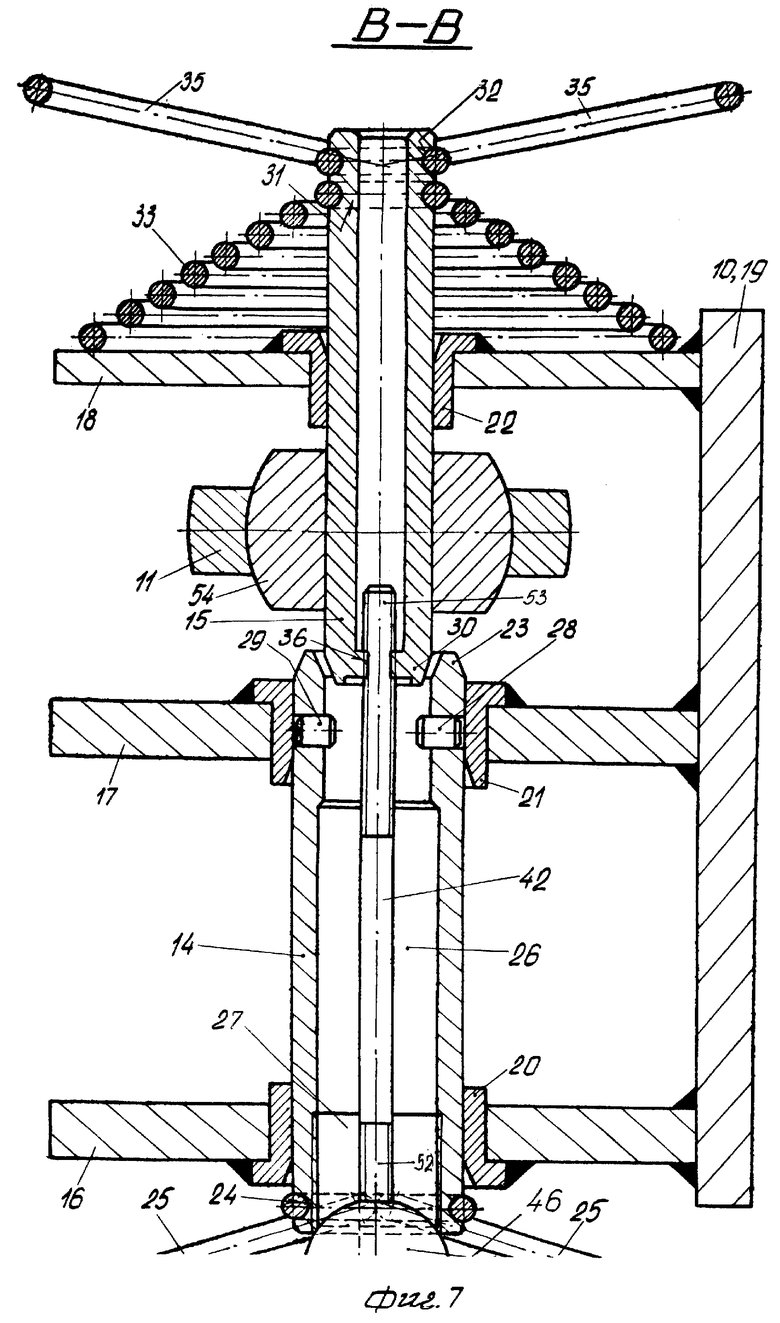
на фиг. 7 - то же, монтаж пальца при навешивании манипулятора на нижние продольные тяги навески трактора класса тяги 3,0;
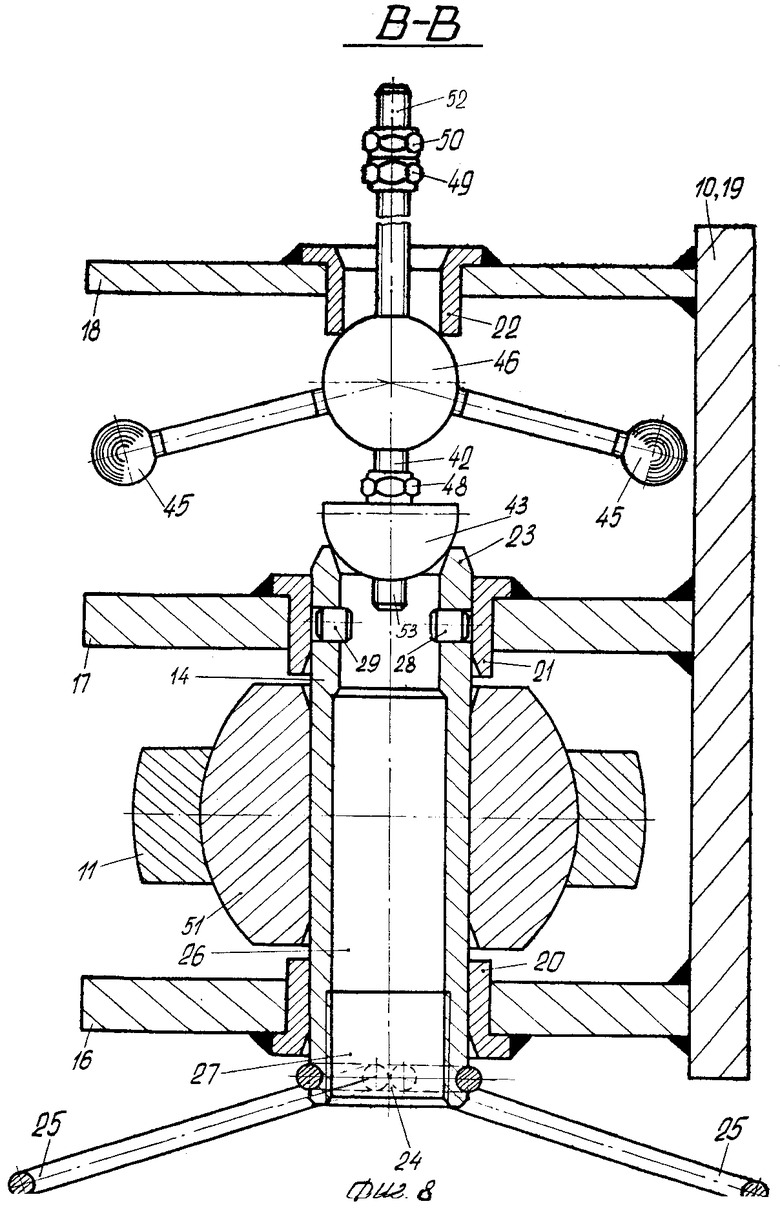
на фиг. 8 - то же, демонтаж полого пальца большего диаметра при изменении класса тяги агрегатируемого трактора, например трактора Т-150 класса тяги 3,0 вместо трактора К-701М класса тяги 5,0;
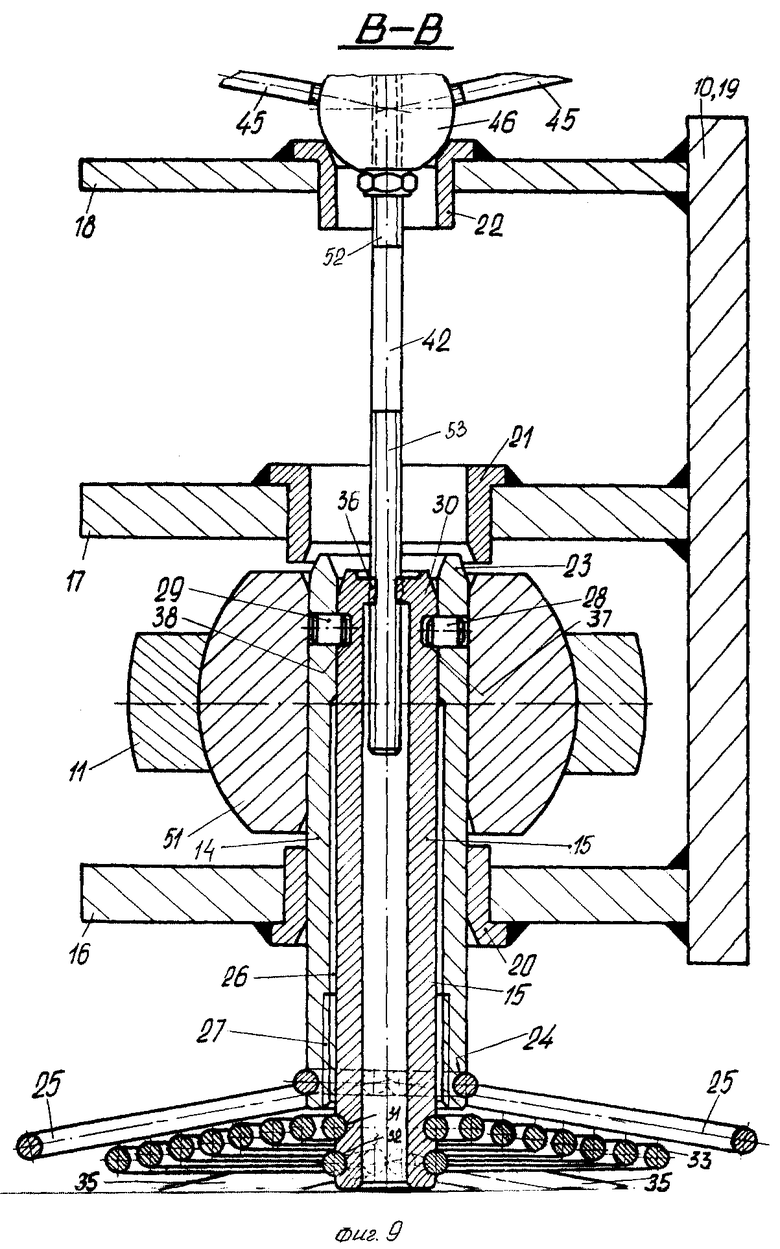
на фиг. 9 - то же, сборка (монтаж) левого пальца (большего диаметра) с тягой гидронавески трактора на проушине при навеске сельскохозяйственного манипулятора на трактор К-701М тяги 5,0;
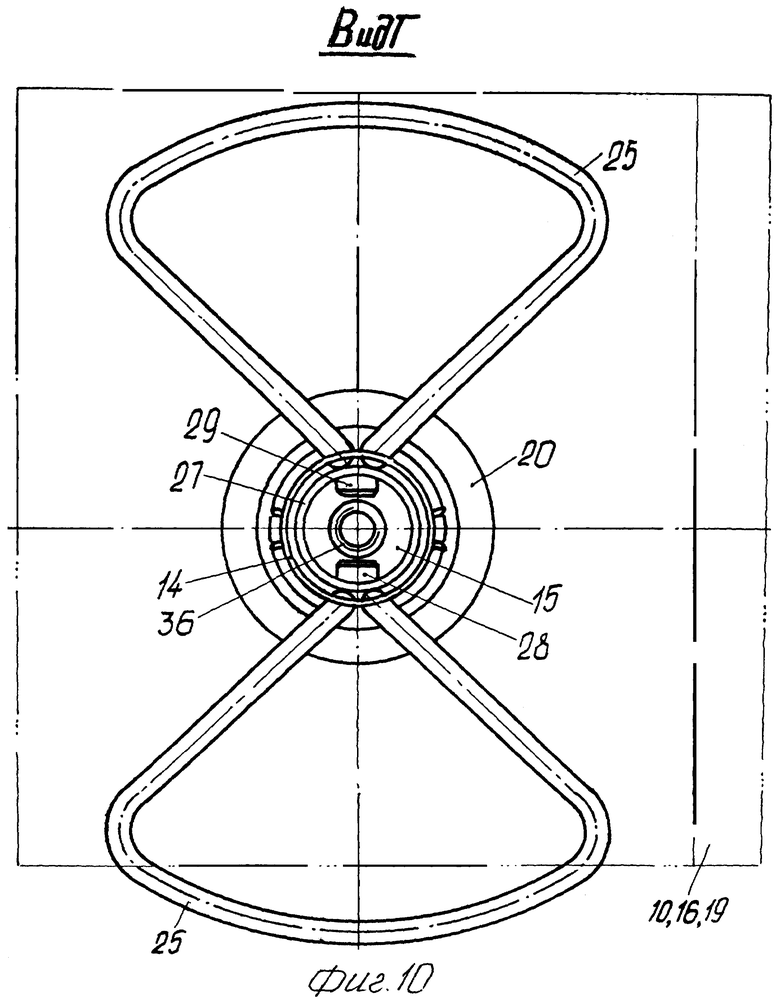
на фиг. 10 - вид Г на фиг. 3, положение ручек после фиксации пальцев меньшего и большего диаметров на левой проушине, вид со стороны левой части полого пальца большого диаметра.
Сведения, подтверждающие возможность осуществления изобретения, заключаются в следующем.
Сельскохозяйственный манипулятор (см. фиг. 1 и 2) содержит плоское основание 1 с выносными (выдвигаемыми) опорами 2 и проушинами с пальцами для соединения с тягами гидронавески агрегатируемого трактора, опорно-поворотную колонку 3 с шарнирно-сочлененной стрелой 4 и грузозахватное средство. Опорно-поворотная колонка 3 закреплена на основании 1 с возможностью поворота вокруг вертикальной оси. На колонке 3 шарнирно смонтирована коренная секция двухсекционной шарнирно-сочлененной стрелы 4 с рукоятью 5 и два параллельно расположенных гидроцилиндра 6 для подъема и опускания секции стрелы 4 и рукояти 5. Положение рукояти 5 относительно секции стрелы 4 фиксируется парой силовых гидроцилиндров 7. Грузозахватное средство, например крюк 8, смонтировано на конце стрелы 4. Поворот колонки 3 производится механизмом, например, в виде пары силовых гидроцилиндров. На тыльной от колонки 3 стороне основания 1 размещены проушины 9 и 10, соединенные с нижними тягами 11 и 12 гидронавески трактора 13.
Каждая проушина 9(10) выполнена в виде Е-образной формы. Проушины 9 и 10 на основании 1 установлены со взаимным удалением. Это обеспечивает устойчивое положение основания 1 при навеске на тяги 11 и 12 относительно продольной и поперечной баз рамы трактора 13. В проушинах 9 и 10 Е-образной формы в их отверстиях установлены с возможностью монтажа, фиксации и демонтажа взаимно сопрягаемые полые пальцы 14 и 15 большего и меньшего диаметров.
Каждая проушина 10 (см. фиг. 3 и 4) содержит параллельно установленные щеки 16, 17 и 18, закрепленные ортогонально тавровыми сварными швами на вертикальной полке 19. Проушины 9 и 10 с вертикальными полками 19 закреплены на тыльной стороне плоского основания 1. В щеках 16 и 17 выполнены соосные отверстия, в которых установлены опорные втулки 20 и 21. Внутренний диаметр втулок 20 и 21 соответствует размеру внешнего диаметра пальца 14. В щеке 18 выполнено отверстие с меньшим диаметром для установки втулки 22 с внутренним диаметром под размер пальца 15.
Опорные втулки 20, 21 и 22 со стороны подачи пальцев 14 и 15 выполнены с фасками, обеспечивающими сборку подвижных сопряжений вал - втулка. Опорные втулки 20, 21 и 22 со щеками 16, 17 и 18 соединены замкнутыми сварными швами, уложенными по кромке буртиков.
Пальцы 14 и 15 выполнены полыми двух типоразмеров (см. фиг. 6). Сечения полых пальцев 14 и 15 выбраны из условия обеспечения прочности и жесткости при критических нагрузках. Запас прочности - трехкратный.
Внутренняя полость пальца 14 большего диаметра выполнена с резьбовым участком 27 для ввинчивания распорпой втулки 44 и с возможностью ввода со стороны резьбового участка 36 пальца 15 меньшего диаметра для ввинчивания шпильки 42.
Палец 14 большего диаметра на одном конце имеет заходную часть 23 в виде внешней и внутренней фасок длиной 8 мм. На противоположном конце пальца 14 в кольцевой канавке 24 размещена пара Ω- - образных ручек 25. Дугообразные части ручек 25, удаленные от плоскости симметрии кольцевой канавки, отклонены на угол не менее 15o. Это обеспечивает удобство обслуживания при монтаже манипулятора.
Внутренняя полость 26 каждого пальца 14 большего диаметра имеет резьбовой участок 27 на одном конце и пару диаметрально ориентированных штифтов 28 и 29 на другом конце. Внутренняя полость пальца 14 выполнена ступенчатой для расширения диапазона выполняемых сборочных и демонтажных работ.
Палец 15 меньшего диаметра на одном конце также имеет заходную часть 30 в виде фаски длиной 6 мм с углом наклона 30o к его оси. На противоположном конце пальца 15 в кольцевых канавках 31 и 32 размещены упругий элемент 33 фиксатора 34 взаимного положения пальцев 14 и 15 и пара Ω- образных ручек 35. Дугообразные части ручек 35 отклонены на угол не менее 15o от плоскости симметрии кольцевой канавки 32. В кольцевой канавке 31 внутренним упругим кольцом смонтирован упругий элемент 33, выполненный в виде пружины равного сопротивления. Упругий элемент 33 изображен на фиг. 6 в сжатом рабочем положении, а на фиг. 7 - в свободном, нерабочем положении. Внутренняя полость пальца 15 выполнена ступенчатой и со стороны заходной части 30 имеет резьбовой участок 36 (см. фиг. 3, 4, 6-10).
Фиксатор 34 взаимного положения пальцев 14 и 15 в проушине 10 выполнен в виде пары диаметрально ориентированных штифтов 28 и 29, смонтированных во внутренней полости заходной части 23 полого пальца 14 большего диаметра, и пары U-образных байонетовых пазов 37 и 38, выполненных на внешней поверхности заходной части 30 полого пальца 15 меньшего диаметра.
Средство для монтажа, фиксации и демонтажа полых пальцев 14 и 15 во втулках 20, 21 и 22 проушин 9 и 10 выполнено в виде комплекта приспособлений, включающего смонтированные на резьбовой шпильке 42 шаровый слой 43, распорную втулку 44, шаровую опору 46 с воротком 45 и крепежными элементами - гаек 47-50 с метрической резьбой (см. фиг. 5).
Сельскохозяйственный манипулятор работает следующим образом.
Рассмотрим работу навесного манипулятора на примере использования в завершающей стадии технологического процесса добычи и предварительной подготовки солодкового корпя в качестве лекарственного и технического сырья при поставке на экспорт крупных партий лакрицы, спрессованной в кипах массой до 200 кг.
Лакричный (солодковый) корень отправляют на экспорт в крупнотоннажных контейнерах грузоподъемностью 10, 20 и 30 т. Кондиционные корни и корневища солодки после мойки и сушки прессуют гидравлическими прессами усилием 250 кН в кипы массой 200 кг ± 10%. Кипы с габаритами 0,4 х 0,8 х 0,5 м обвязывают металлическими полосами сечением 20 х 0,7 мм. Масса тары (контейнеров) варьирует от 2 до 5 т. Контейнеры к местам первичной подработки корневой массы лакрицы доставляют трейлерами. Доставленные контейнеры в рабочее положение устанавливают с помощью манипулятора, который навешивают на тяги 11 и 12 трактора К-701М класса тяги 5,0. Агрегатирование трактора К-701М с манипулятором производят в следующем порядке.
Трактор K-701M задним ходом подают к проушинам 9 и 10, расположенных на задней части плоского основания 1. Сферические шарниры 51 (см. фиг. 9) нижних продольных тяг 11 размещают между параллельными щеками 16 и 17 в левой и правой проушинах 10. Затем вводят во внутреннюю полую часть 26, например, левого полого пальца 14 с большим внешним диаметром (60-0.63 мм), со стороны его резьбовой части 27 - палец 15 меньшего диаметра (35-0,5 мм). Штифты 28 и 29 пальца 14 совмещают с заходными частями 39 U-образных байонетовых пазов 37 и 38 на конце пальца 15. При осевом перемещении пальца 15 в полости пальца 14 витки упругого элемента 33 сжимаются до упора ручками 25. В таком совмещенном положении пальцы 14 и 15 вводят во втулку 20 на внешней щеке 16, а затем направляют заходную часть 23 пальца 14 в отверстие сферического шарнира 51 левой нижней продольной тяги 11. Рельеф местности и несоответствие геометрических параметров тяг гидронавески трактора 13 не позволяют беспрепятственно направить заходную часть 23 пальца 14 в опорную втулку 21 щеки 17. Монтаж пальца 14 в отверстии втулки 21 осуществляют средством для монтажа, фиксации и демонтажа полых пальцев 14 и 15.
Для этого на внешний резьбовой участок 52 шпильки 42 из комплекта приспособлений навинчивают шаровую опору 46 с диаметрально направленными воротками 45. Гайкой 47 фиксируют положение шаровой опоры 46 на резьбовой части шпильки 42. Свободный резьбовой конец шпильки 42 направляют в соосные отверстия опорных втулок 22 и 21. Далее шпильку 42 в свободном состоянии посредством пары воротков ввинчивают в резьбовой участок 36 пальца 15. Вращение шпильки 42 совместно с шаровой опорой 46 приводит к осевому перемещению нагруженного пальца 15 в направлении к опорной втулке 21, преодолевая силы трения. Заходная часть 23 пальца 14 упирается в фаску втулки 21. Палец 14 ориентируется во втулке 21 и постепенно занимает свое рабочее положение. При полностью вдвинутом пальце 14 во втулках 20 и 21 его придерживают за ручки 25 и вывинчивают резьбовую шпильку. 42. Затем поворотом ручки 35 палец 15 выводят из байонетовых пазов 38 и 37 и смещают его вдоль оси пальца 14.
Освободившийся палец 15 своей заходной частью 30 направляют во втулку 22 на щеке 18 проушины 10(9). Затем заходную часть 30 пальца 15 размещают в посадочной (сопрягаемой) части во внутренней полой части 26 пальца 14. Палец 15, который в данном случае не нагружен, за ручку 35 поворотом вокруг оси свободно подводят заходными частями 39 байонетовых пазов 37 и 38 к штифтам 28 и 29 полого пальца 14. Сначала пальцу 15 придают поступательное перемещение в направлении внутренней щеки, а затем поворачивают его вокруг оси до упора. Далее освобождают палец 15 от усилия рук механизатора. Под действием сжатых витков упругого элемента 33 палец 15 блокирующими участками плотно прижимается к штифтам 28 и 29 и надежно фиксируется в рабочем положении.
Для переагрегатирования манипулятора с трактором иного класса тяги пальцы 14 из проушин 9 и 10 демонтируют в следующей последовательности (см. фиг. 9 и 8). Палец 15 ручками 35 отжимают в направлении щеки 18, после чего поворачивают его вокруг своей оси. Штифты 28 и 29 занимают свое положение в заходных частях байонетовых пазов 37 и 38 фиксатора 34 блокировки взаимного положения пальцев 14 и 15. Далее палец 15 извлекают из опорной втулки 22 и опорной части в ступенчатой полости нагруженного пальца 14. Извлечение нагруженного пальца 14 из опорных втулок 21 и 20 и сферического шарнира 51 левой нижней тяги осуществляют средством для демонтажа, которое в сборе представлено на фиг. 8. Между втулками 21 и 22 в установленном порядке на резьбовой конец 53 шпильки 42 размещают шаровой слой 43 и шаровую опору 46 с воротками 45. Шаровой слой 43 в нужном месте фиксируют гайкой 48. На резьбовом конце 52 шпильки 42 навинчивают гайку 49 и вторую гайку 50 в качестве контргайки. Гайки 49 и 50 придерживают рожковым ключом, а шаровую опору 46 вращают за вороток 45. Таким образом палец 14 извлекается из опорных втулок 21 и 20 и из сферического шарнира 51 тяги 11 навески трактора 13.
После того, как заходная часть 23 пальца 14 освобождается от втулки 21 за счет технологических зазоров в сопряжении палец 14 - втулка 20, палец 14 отклоняется в сторону приложенной нагрузки. Однако наличие сферических поверхностей шарового слоя 43 и шаровой опоры 46 позволяют полностью удалить палец 14 из отверстий сферического шарнира 51 и втулки 20.
Агрегатирование предложенного манипулятора с трактором 13 меньшего класса тяги производят в следующем порядке (см. фиг. 7).
При подготовке манипулятора для погрузки прессованных кип из корней и корневищ солодки в качестве лекарственного сырья трактор 13 подают задним ходом проушинам к 9 и 10 на задней части плоского основания 1. Сферический шарнир 54, например, левой нижней тяги 11 гидронавески трактора 13 размещают между параллельными щеками 17 и 18 левой проушины 10 на основании 1.
Проведенные нами экспериментальные исследования показывают, что установить соосно сферический шарнир 54 (51) и опорные втулки 21 и 22 (20 и 21) практически невозможно. Этому препятствуют ряд объективных причин. Палец 14 в опорные втулки 20 и 21 проушины устанавливают штатно усилием руки механизатора без дополнительных приспособлений. Затем палец 15 за ручки 35 направляют в заходную часть втулки 22 на щеке 18. Витки упругого элемента 33 первыми касаются внешней стенки щеки 18. При сжатии упругого элемента 33 заходная часть 30 полого пальца 15 поступает в отверстие сферического шарнира 54 левой нижней тяги 11 гидронавески трактора 13.
Затем механизатор вводит со стороны резьбовой части 27 пальца 14 резьбовой конец 53 шпильки 42. На резьбовой части 52 шпильки 42 должна быть размещена шаровая опора 46 с воротками 45. При ввинчивании резьбовой части 53 шпильки 42 в резьбовой участок 36 пальца 15 его заходная часть 30 направляется в заходную часть 23 полого пальца 14 большего диаметра. При осевом перемещении пальца 15 относительно пальца 14 заходные части 39 байонетовых пазов 37 и 38 ориентируются на штифты 28 и 29. При достижении штифтами 28 и 29 в пазах 37 и 38 рабочих участков 40 механизатор ручками 25 поворачивает палец 15 до упора упомянутых диаметрально ориентированных штифтов 28 и 29 в рабочие участки 41 (см. фиг. 9). Далее механизатор ручками 25 перемещает палец 15 в обратном направлении, предварительно вывинтив шпильку 42 из резьбовой части 36 пальца 15.
На загрузку крупнотоннажного контейнера массой нетто 30 т (150 кип массой 200 кг ± 10%) требуются две восьмичасовые рабочие смены. При завершении погрузки контейнер герметизируют, снабжают сертификатом качества продукции и отправляют в адрес заказчика. Погрузку контейнеров в трейлеры производят автомобильными кранами большой грузоподъемности или используют одновременно два однотипных манипулятора в агрегате с тракторами класса тяги 5,0 или 6,0.
Перенавеску манипулятора производят в следующем порядке.
Для этого механизатор за ручки 35 смещает палец 15 во внутреннюю полую часть 26 пальца 14, а затем поворачивает палец 15 с рабочими участками 40 в направлении заходных частей байонетовых пазов 37 и 38, максимально приближаясь к штифтам 28 и 29 полого пальца 14. После этого в резьбовую часть 27 полого пальца 14 механизатор ввинчивает распорную втулку 44 рожковым ключом за шестигранник 55. Торец распорной втулки упирается в проточку на торцевой части пальца 15 и выдавливает его из полости пальца 14. Освободившийся конец пальца 15 с его заходной частью 30 извлекают из сферического шарнира 54 левой нижней тяги 11 гидронавески трактора 13.
При перенавеске манипулятора с тракторов класса тяги 2,0 аналогичным образом поступают с пальцами 14 и 15 в правой проушине 10 и верхней проушине 9.
Описанная конструкция пальцев 14 и 15 и проушин 9 и 10 Е-образной формы позволяет ужесточить поля допусков линейных размеров в сопряжениях пальцев 14 и 15 и в опорных втулках 20 и 22. Этим исключаются ударные нагрузки на тяги 11 и 12 гидронавески трактора 13, а также обеспечивается высокая степень надежности выполнения погрузочно-разгрузочных работ.
Проушины Е-образной формы с комплектом пальцев и средством для монтажа-демонтажа и фиксации взаимно сопрягаемых пальцев обеспечивают агрегатирование заявленного манипулятора с широким классом тяги колесных и гусеничных тракторов сельскохозяйственного назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ КОРНЕВИЩ КОРНЕОТПРЫСКОВЫХ СОРНЯКОВ, ПРЕИМУЩЕСТВЕННО КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160524C1 |
| АГРЕГАТ ДЛЯ ДОБЫЧИ КОРНЕЙ СОЛОДКИ | 1999 |
|
RU2151481C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1997 |
|
RU2118479C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| ОРУДИЕ ДЛЯ РЫХЛЕНИЯ ПОЧВЫ | 1996 |
|
RU2113778C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО И КРУГОВОГО ДЕЙСТВИЯ | 1998 |
|
RU2129262C1 |
Изобретение относится к подъемно-транспортным агрегатам. Сельскохозяйственный манипулятор содержит плоское основание (1) с выносными опорами (2) и проушинами с пальцами для соединения с тягами гидронавески трактора, опорно-поворотную колонну (3) с шарнирно сочлененной стрелой и грузозахватным средством. Каждая проушина выполнена Е-образной формы с установленными в ее отверстиях с возможностью монтажа, фиксации и демонтажа взаимно сопрягаемыми полыми пальцами меньшего и большего диаметров, снабженными фиксатором взаимного положения, выполненным в виде пары диаметрально ориентированных штифтов, смонтированных во внутренней полости пальца большего диаметра, и U-образных байонетных пазов, выполненных на внешней поверхности заходной части пальца меньшего диаметра. Манипулятор снабжен средством для монтажа, фиксации и демонтажа взаимно сопрягаемых полых пальцев, выполненным в виде комплекта приспособлений, включающего смонтированные на резьбовой шпильке распорную втулку, шаровой слой и шаровую опору с воротком. Внутренняя полость пальца большего диаметра выполнена с резьбовым участком для ввинчивания распорной втулки и с возможностью ввода со стороны резьбового участка пальца меньшего диаметра, а внутренняя полость пальца меньшего диаметра имеет резьбовой участок для ввинчивания шпильки. Заявленное изобретение сокращает время переналадки и расширяет функциональные возможности. 10 ил.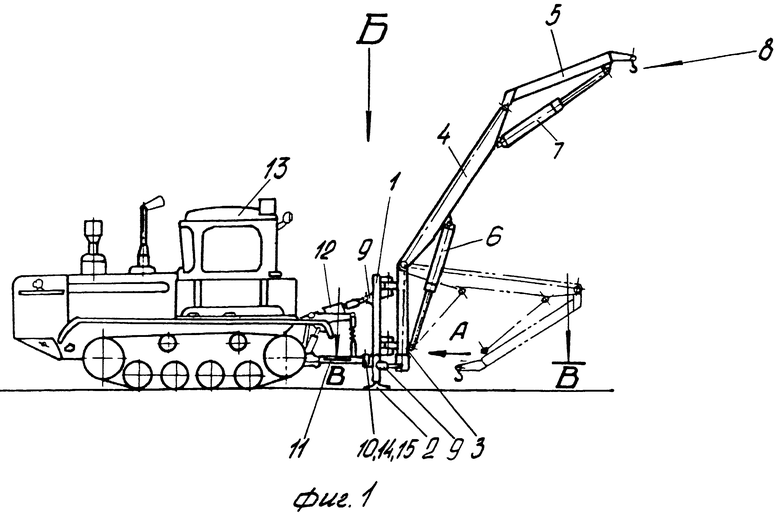
Сельскохозяйственный манипулятор, содержащий плоское основание с выносными опорами и проушинами с пальцами для соединения с тягами гидронавески трактора, опорно-поворотную колонну с шарнирно сочлененной стрелой и грузозахватным средством, отличающийся тем, что каждая проушина выполнена Е-образной формы с установленными в ее отверстиях с возможностью монтажа, фиксации и демонтажа взаимно сопрягаемыми полыми пальцами меньшего и большего диаметров, снабженными фиксатором взаимного положения, выполненным в виде пары диаметрально ориентированных штифтов, смонтированных во внутренней полости пальца большего диаметра, и U-образных байонетных пазов, выполненных на внешней поверхности заходной части пальца меньшего диаметра, при этом он снабжен средством для монтажа, фиксации и демонтажа взаимно сопрягаемых полых пальцев, выполненным в виде комплекта приспособлений, включающего смонтированные на резьбовой шпильке распорную втулку, шаровой слой и шаровую опору с воротком, при этом внутренняя полость пальца большего диаметра выполнена с резьбовым участком для ввинчивания распорной втулки и с возможностью ввода со стороны резьбового участка пальца меньшего диаметра, а внутренняя полость пальца меньшего диаметра имеет резьбовой участок для ввинчивания шпильки.
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| US 4447071 А, 08.05.1984 | |||
| ТОПЛИВОВОЗДУШНАЯ ГОРЕЛКА КАМЕРЫ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2199700C2 |
