Изобретение относится к грузоподъемной технике, в частности к сельскохозяйственному машиностроению.
Известно устройство для поворота и вылета стрелы крана, содержащее основание, раму, шарнирно установленные на ней под углом друг к другу гидроцилиндры, штоки которых шарнирно соединены между собой и со стрелой, установленной на раме, поворотной в горизонтальной плоскости оси с возможностью поворота в вертикальной плоскости, в котором с целью расширения зоны действия и снижения динамических нагрузок рама выполнена в виде Т-образной фермы, на концах горизонтальной перекладины которой закреплены корпусa гидроцилиндров, а вертикальная стойка фермы выполнена пустотелой для закрепления внутри нее поворотной оси, при этом ферма установлена на основании с возможностью поворота в горизонтальной плоскости посредством дополнительного привода, взаимодействующего с наружной поверхностью вертикальной стойки; дополнительный привод выполнен в виде гидровинтового механизма, включающего закрепленную на наружной поверхности вертикальной стойки Т-образной фермы обойму и размещенный внутри нее поршень с центральным отверстием, охватывающим вертикальную стойку, установленный с возможностью перемещения вдоль оси последней, зафиксированный от поворота вокруг нее и взаимодействующий с ней посредством винтовой нарезки, выполненной на сопрягаемых поверхностях поршня и стойки (SU авторское свидетельство N 1813697, МПК B 66 C 23/82. Устройство для поворота и изменения вылета стрелы крана // В.М.Герасун, А.А.Карсаков, В.И.Пындак, А.Ф.Рогачев, В.Л.Строков. Заявлено 11.03.1991, опубликовано 07.05.1993).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относятся ограниченная зона обслуживания в горизонтальной плоскости и сложность конструкции дополнительного привода.
Наиболее близким устройством того же назначения к заявленному объекту по совокупности признаков является манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью и дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки (см. Навесной манипулятор "Волгоградский" //Информационный листок Волгоградского ЦНТИ N 230-97. Составители: В.М.Герасун, В.И.Пындак, А.Ф.Рогачев. - Волгоград. - 1997. - С. 4).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, принятого за ближайший аналог, относятся ограниченная зона действия в продольно-вертикальной плоскости шарнирно-сочлененной стрелы и рукояти и неудовлетворительные динамические и кинематические характеристики при подъеме груза.
Задача, на решение которой направлено заявляемое изобретение, - расширение зоны обслуживания в продольно-вертикальной плоскости.
Технический результат - расширение зоны обслуживания и повышение грузоподъемности.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном манипуляторе, содержащем плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоять с грузозахватным крюком, гидроцилиндры поворота опорно-поворотной колонки, силовые гидроцилиндры управления стрелой и рукоятью, согласно изобретению штоки силовых гидроцилиндров управления стрелой и рукоятью кинематически связаны двуплечим рычагом, ось которого шарнирно совмещена с осью соединения стрелы и рукояти, при этом стрела и рукоять снабжены ограничителями поворота двуплечего рычага.
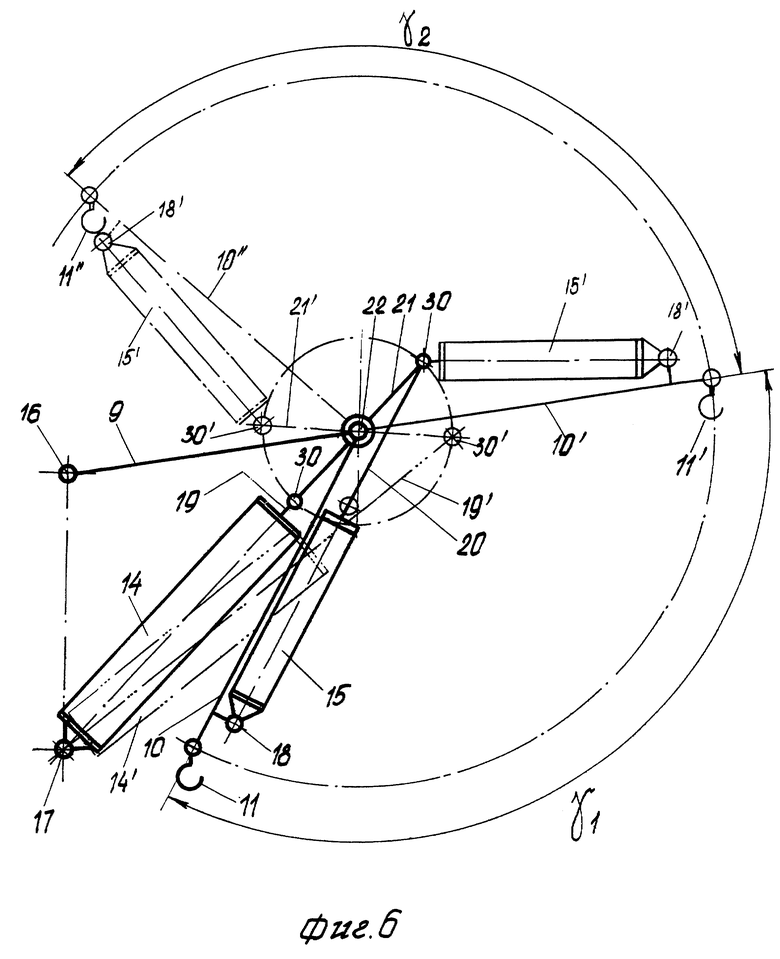
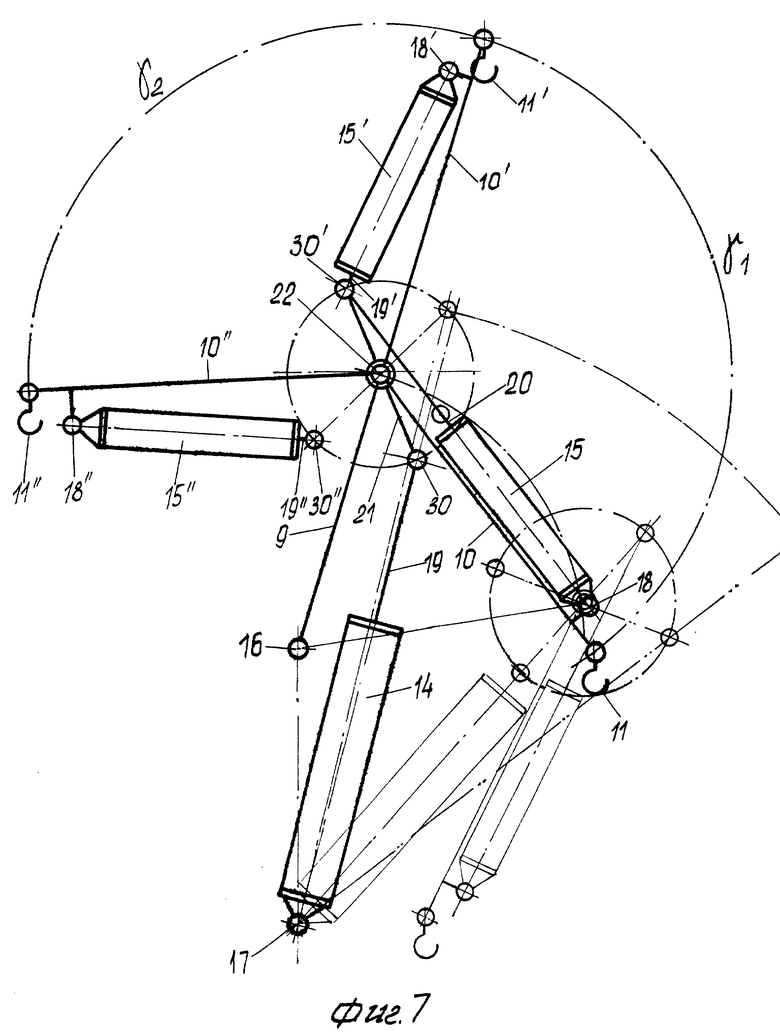
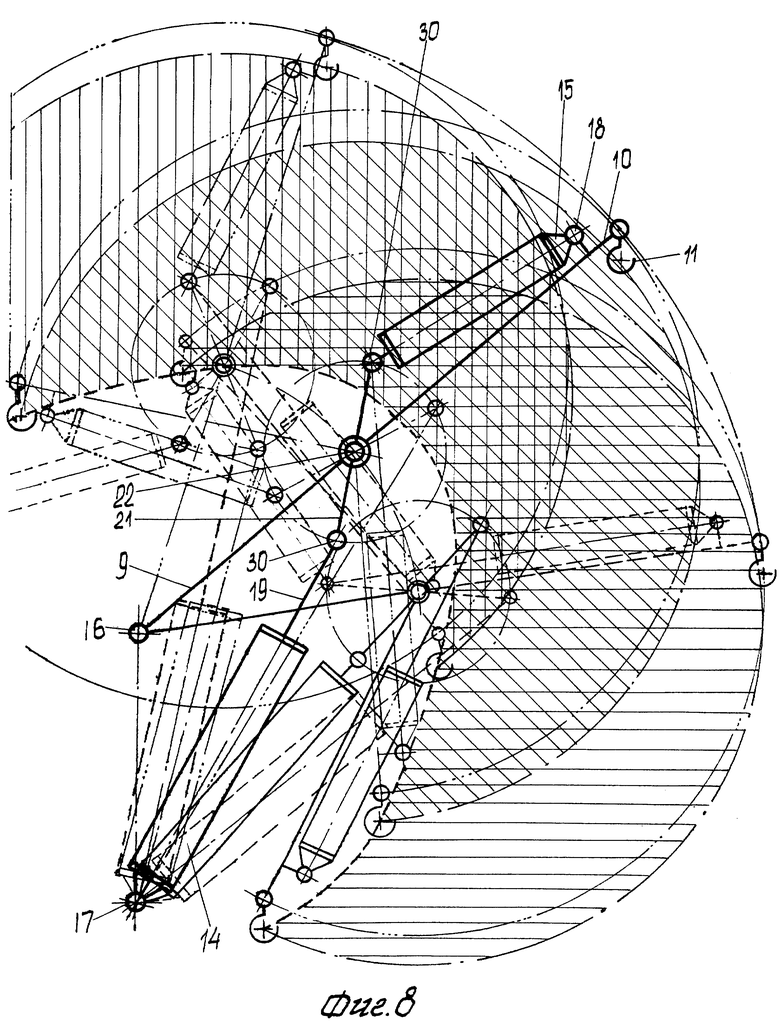
На фиг. 1 представлен манипулятор, навешенный на гусеничный трактор класса тяги 3, в рабочем положении, вид в плане; на фиг. 2 - то же, вид слева; на фиг. 3 - сечение А-А по фиг. 2, поперечное сечение двуплечего рычага на оси поворота стрелы и рукояти; на фиг. 4 - сечение Б-Б по фиг. 1, продольный разрез верхней части стрелы, двуплечего рычага, сопрягаемого конца рукояти и ограничителей предельных поворотов рукояти и стрелы; на фиг. 5 - кинематика стрелы, двуплечего рычага и штока силового гидроцилиндра управления положением стрелы; на фиг. 6 - кинематика грузозахватного крюка, рукояти и ее силового гидроцилиндра при крайнем нижнем положении стрелы; на фиг. 7 - кинематика грузозахватного крюка, рукояти и ее силового гидроцилиндра при крайнем верхнем положении удаленного конца стрелы; на фиг. 8 - зона обслуживания стрелы и рукояти при среднем и крайних нижнем и верхнем положениях стрелы и предельных положениях рукояти с грузозахватным крюком в продольно-вертикальной плоскости (горизонтальная штриховка на поле чертежа - зона обслуживания при крайнем нижнем положении стрелы; вертикальная штриховка - зона обслуживания при крайнем верхнем положении стрелы; наклонная штриховка - при среднем положении стрелы).
Манипулятор (см. фиг. 1 и 2) содержит плоское основание 1 с кронштейнами навески 2, 3 и 4 и выдвижными опорами 5 и 6, закрепленную с возможностью поворота вокруг вертикальной оси 7 основания 1 опорно-поворотную колонку 8 со смонтированными шарнирно на ней стрелой 9, рукоять 10 с грузозахватным крюком 11, гидроцилиндры 12 и 13 механизма поворота опорно-поворотной колонки 8, силовые гидроцилиндры 14 и 15 управления стрелой 9 и рукоятью 10. Стрела 9 соединена горизонтальным шарниром 16 с верхней частью опорно-поворотной колонки 8. Основание силового гидроцилиндра 14 связано с колонкой 8 шарниром 17. Основание силового цилиндра 15 размещено на удаленном конце рукояти 10 и соединено с ней шарниром 18. Штоки 19 и 20 силовых гидроцилиндров 14 и 15 управления стрелой 9 и рукоятью 10 кинематически связаны двуплечим рычагом 21. Ось 22 рычага 21 совмещена с осью шарнирного соединения стрелы 9 и рукояти 10. Двуплечий рычаг 21 образован парой щек 23, установленных со смещением друг от друга на втулке 24. В полости втулки 24 запрессована пара оппозитно размещенных подшипников скольжения 25 из антифрикционного материала. На удаленных концах 26 и 27 щек 23 сварными швами размещены пары опорных втулок 28 и 29. В соосных отверстиях пар втулок 28 и 29 смонтированы оси 30. На осях 30 посредством шаровых втулок 31 шарнирно соединены штоки 19 и 20 соответственно силовых гидроцилиндров 14 и 15 управления положением стрелы 9 и рукояти 10 с грузозахватным крюком 11. Стрела 9 выполнена полой, сварной конструкции из гнутого профиля 32 и листовой заглушки 33. Сечения по длине стрелы 9 выполнены одинаковыми. Верхняя часть стрелы 9 заканчивается парой плит 34 и 35. Плита 35 снабжена фиксатором 36 положения оси 22 (см. фиг. 3). Рукоять 10 выполнена в виде балки переменного сечения. Оголовок рукояти 10 снабжен парой проушин 37, в которых размещены втулки 38 из закаленной стали в качестве подшипников скольжения. Проушины 37 рукояти 10 вместе с втулкой 38 размещены на оси 22 между подшипниками 25 втулки 24 двуплечего рычага 21 и плитами 34 и 35 стрелы 9. Такое конструктивное исполнение кинематической связи рукояти 10 со стрелой 9 обеспечивает независимое угловое смещение двуплечего рычага 21 как относительно оси 22, так и рукояти 10 или стрелы 9, а в общем случае задает требуемое положение грузозахватного крюка 11 на заданной высоте относительно опорной поверхности или с различным удалением от основания 1 (см. фиг. 1-4). Стрела 9 и рукоять 10 снабжены ограничителями 39 и 40 двуплечего рычага 21 (см. фиг. 4).
Манипулятор работает следующим образом.
При агрегатировании заявленного манипулятора с трактором 41 (ВТ-100, ВТ-130) (см. фиг. 1 и 2) класса тяги 3 последний задним ходом подают к плоскому основанию 1 со стороны кронштейнов навески 2, 3 и 4. Нижние продольные тяги 42 и 43 на оси 44 размещают на максимально удаленное расстояние между передними шарнирами таким образом, чтобы центральная регулируемая верхняя тяга 45 и нижние продольные тяги 42 и 43 трактора 41 образовали "трехточечную" схему навески плоского основания 1. Блокировочные цепи нижних продольных тяг 42 и 43 устанавливают "крест на крест". Боковые колебания любой точки поверхности основания 1 от продольной плоскости агрегата не должны превышать ±10 мм в транспортном и рабочем положениях. Удаленные концы тяг 42, 43 и 45 пальцами соединяют с кронштейнами навески 2-4 основания 1. Рукавами высокого давления соединяют надлежащим образом попарно силовые гидроцилиндры 12 и 13 механизма поворота опорно-поворотной колонки 8 и силовые цилиндры 14 и 15 стрелы 9 и рукояти 10. Далее тягами 42, 43 и 45 гидронавески трактора 41, управляемого силовым гидроцилиндром 6, плоское основание 1 переводят в полное транспортное положение. Опоры 5 и 6 выдвигают из полости плоского основания 1 и фиксируют в рабочем положении пальцами во втулках основания 1. Далее основание 1 гидронавеской трактора 41 опускают на опоры 5 и 6. Ручку управления среднего гидрозолотника гидрораспределителя трактора 41 переводят сначала в положение "Нейтральное", а затем управление силовым цилиндром 46 переводят на переключатель потока жидкости на управление силовых гидроцилиндров 12 и 13 для дистанционного управления опорно-поворотной колонкой 8. Левую ручку гидрозолотника гидрораспределителя (по ходу движения трактора 41) гидравлически соединяют рукавами и трубопроводами с полостями гидроцилиндра 14 стрелы 9, а правую ручку гидрозолотника - с полостями силового гидроцилиндра 15 рукояти 10.
Поднимаемый груз, например спрессованные кипы из лакрицы, зачаливают подстропником и соединяют с грузозахватным крюком 11 и укладывают на платформу 47, например, прицепной тракторной тележки 48.
Рассмотрим кинематику стрелы 9 (см. фиг. 5) при крайнем нижнем ее положении (исходное положение при перемещении левой ручки гидрораспределителя либо в положение "Опускание", либо "Плавающее", и при крайнем верхнем положении при подаче масла (рабочей жидкости) в бесштоковую полость силового гидроцилиндра 14 (переводом левой ручки гидрозолотника в положение "Подъем"). При подаче рабочей жидкости и фиксированном положении двуплечего рычага 21 на оси 22 относительно стрелы 9 перемещение штока 19 на величину ΔS2 относительно шарнира 17 силового цилиндра 14 приводит к повороту стрелы 9 относительно шарнира 16 на угол α. Запас хода штока 19 относительно шарнира 17 на величину ΔS1 позволяет двуплечий рычаг 21 относительно оси 22 при крайнем верхнем положении стрелы 9 повернуть на угол β1, а при крайнем нижнем положении - на угол β2. Полное перемещение S3 штока 19 из полости силового цилиндра 14 реализуется на повороты стрелы 9 относительно шарнира 16 на угол α и двуплечего рычага 21 на конце стрелы 9 относительно оси 22 на угол β1 (β2). Положение нижнего плеча (удаленный конец 26) рычага 21 и штока 19 силового гидроцилиндра 14 при крайнем нижнем положении рукояти 9 на одной прямой линии зафиксировано ограничителем поворота 39.
Рассмотрим кинематику рукояти 10 при крайнем нижнем положении стрелы 9 (см. фиг. 6). При полностью втянутом штоке 19 в полость гильзы гидроцилиндра 14 нижнее плечо двуплечего рычага 21 соприкасается с ограничителем поворота 39 стрелы 9. Центры шарниров 16 и 17 на опорно-поворотной колонке 8 и геометрическая ось симметрии оси 22 стрелы 9 образуют опорный треугольник. При подаче масла под рабочим давлением из правой секции гидрораспределителя трактора 41 в бесштоковую полость гидроцилиндра 15, основание последнего вместе с шарниром 18 на конце рукояти 10 поворачивают саму рукоять 10 при неподвижном положении двуплечего рычага 21 относительно их общей оси 22. Грузозахватный крюк 11 (см. фиг. 6) занимает самое крайнее нижнее положение относительно опорной поверхности (плоскости касания левой и правой опор 5 и 6). При неизменном положении двуплечего рычага 21, управляя положением поршня штока 20, грузозахватный крюк 11 в продольно-вертикальной плоскости относительно оси 22 может иметь угловое смещение γ1, оптимальная величина которого находится в пределах 110-130o. При изменении положения двуплечего рычага 21 относительно рукояти 9, грузозахватный крюк с позиции 11' переходит в положение 11'', а рукоять дополнительно поворачивается на угол γ2 (см. фиг. 6).
На фиг. 7 представлена кинематика стрелы 9, рукояти 10, двуплечего рычага 21 при полностью выдвинутом штоке 19 гидроцилиндра 14. Зона обслуживания стрелой 9 и рукоятью 10 при наличии двуплечего рычага 21 в узле их шарнирного соединения изображена на фиг. 8 (при крайних верхнем и нижнем положениях стрелы 9, в среднем положении стрелы 9 и рукояти 10 с грузозахватным крюком 11).
Расширение зоны обслуживания заявленным манипулятором достигнуто благодаря двуплечему рычагу за счет дополнительной подвижности рукояти с грузозахватным крюком в продольно-вертикальной плоскости. Упрощение конструкции обеспечено за счет совмещения кинематики стрелы и рукояти, а повышение грузоподъемности - за счет размещения силовых цилиндров на стреле и рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
Изобретение относится к грузоподъемной технике, в частности к сельскохозяйственному машиностроению. Манипулятор содержит плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированной шарнирно на ней стрелой, рукоять с грузозахватным крюком, гидроцилиндры поворота опорно-поворотной колонки, силовые гидроцилиндры управления стрелой и рукоятью. Штоки силовых гидроцилиндров управления стрелой и рукоятью кинематически связаны двуплечим рычагом, ось которого совмещена с осью шарнирного соединения стрелы и рукояти, при этом стрела и рукоять снабжены ограничителями поворота двуплечего рычага. Изобретение обеспечивает расширение зоны обслуживания и повышение грузоподъемности. 8 ил.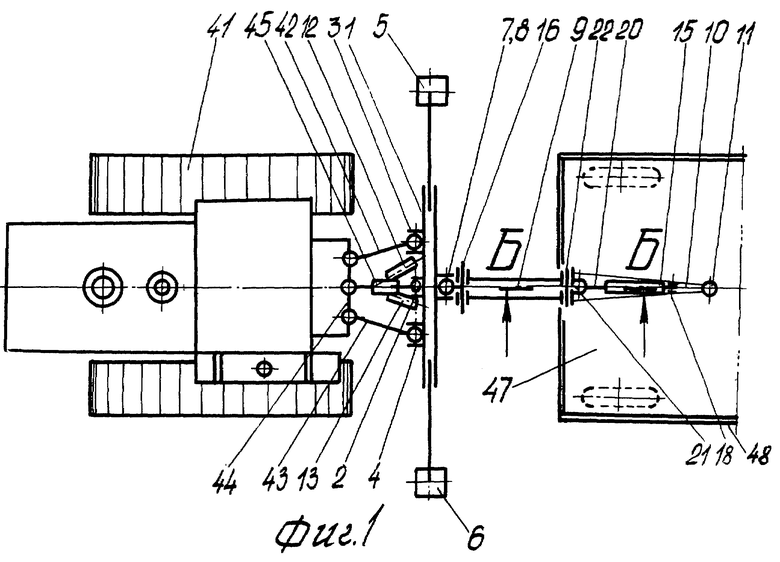
Манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированной шарнирно на ней стрелой, рукоять с грузозахватным крюком, гидроцилиндры поворота опорно-поворотной колонки, силовые гидроцилиндры управления стрелой и рукоятью, отличающийся тем, что штоки силовых гидроцилиндров управления стрелой и рукоятью кинематически связаны двуплечим рычагом, ось которого совмещена с осью шарнирного соединения стрелы и рукояти, при этом стрела и рукоять снабжены ограничителями поворота двуплечего рычага.
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| - Волгоград, 1977 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Экономайзер | 0 |
|
SU94A1 |
| US 5501346 A, 26.03.1996. | |||
