Изобретение относится к системам автоматического регулирования полета и может быть использовано для уменьшения отклонения высоты полета легкого экраноплана от опорного значения под действием порывов ветра.
Известно устройство управления высотой полета тяжелого экраноплана путем отклонения рулевого органа - закрылков (Диомидов В.Б. Автоматическое управление движением экранопланов. - СПБ: ГНЦ РФ - ЦНИИ "Электроприбор", 1996, стр.109), реализующее закон управления вида
 ,
,
где Δ H - отклонение высоты полета от опорного значения,  - вертикальная скорость, kн,
- вертикальная скорость, kн,  - передаточные коэффициенты.
- передаточные коэффициенты.
При полете на малых высотах над опорной поверхностью для экранопланов большое значение имеют возмущения в виде горизонтальных порывов ветра. Горизонтальные порывы ветра, изменяя скорость набегающего на экраноплан потока воздуха и, как следствие, подъемную силу, вызывают подлет или, что более опасно, просадку экраноплана вплоть до касания корпусом опорной поверхности. На тяжелых экранопланах применяют непосредственное управление подъемной силой в продольной плоскости, воздействуя на управляемые (отклоняемые в обе стороны от нейтрального положения) закрылки. Для этого в закон управления вводят сигналы, пропорциональные вертикальной скорости и отклонению высоты полета от опорного значения. Однако на легких экранопланах управляемые закрылки зачастую отсутствуют. Поэтому стабилизировать высоту полета легких экранопланов при действии возмущений в виде горизонтальных порывов ветра воздействием на управляемые закрылки не представляется возможным.
Также известно устройство управления летательными аппаратами в продольной плоскости путем управления рулем высоты (Доброленский Ю.П. Динамика полета в неспокойной атмосфере. - М.: Машиностроение, 1969, стр.57], реализующее закон управления вида
 ,
,
где ω z - текущее значение угловой скорости относительно оси OZ связанной системы координат; Δ ϑ - отклонение угла тангажа от опорного значения; δ в - отклонение руля высоты; Δ Н - отклонение высоты полета от опорного значения; Kн,  , Kϑ - передаточные коэффициенты.
, Kϑ - передаточные коэффициенты.
Полет экранопланов происходит на небольшой высоте над опорной поверхностью - в пределах действия экранного эффекта. Поэтому для измерения высоты полета над опорной поверхностью применяются радиовысотомеры, работающие в сантиметровом диапазоне волн. Вследствие того, что погрешность измерения текущей высоты полета радиовысотомерами, предназначенными для тяжелых экранопланов, составляет около 0,1 м в диапазоне высот 0-15 м (Небылов А.В. Измерение параметров полета вблизи морской поверхности, СПбГААП. СПб., 1994, стр.79], такая погрешность измерения неприемлема для легких экранопланов, полет которых происходит на высотах 0,3-1 м над опорной поверхностью. Уменьшение погрешности измерения высоты полета можно достичь применением радиовысотомеров, работающих в миллиметровом диапазоне. Однако в настоящее время серийное производство таких радиовысотомеров отсутствует, а стоимость экспериментальных образцов высока. Таким образом, противодействие порывам ветра путем введения в закон управления рулем высоты сигнала, пропорционального высоте полета экраноплана над опорной поверхностью, для легкого экраноплана представляет значительные трудности.
В качестве прототипа выбрано устройство одноканального управления продольным движением летательного аппарата путем воздействия на руль высоты (Боднер В.А. Теория автоматического управления полетом. - М.: Наука, 1964, стр.221], которое реализует закон управления рулем высоты следующего вида:
δ в=iV(p)Δ V+iϑ (p)Δ ϑ ,
iV(p)=-kV,
 ,
,
где kV, kϑ ,  - передаточные коэффициенты; р - оператор Лапласа; Δ V - отклонение скорости от опорного значения; Δ ϑ - отклонение угла тангажа от опорного значения.
- передаточные коэффициенты; р - оператор Лапласа; Δ V - отклонение скорости от опорного значения; Δ ϑ - отклонение угла тангажа от опорного значения.
Устройство содержит датчик линейной скорости полета, датчик угловой скорости и датчик отклонения текущего значения угла тангажа от опорного значения, суммирующий усилитель и рулевой агрегат, воздействующий на руль высоты.
Данное устройство позволяет противодействовать ветровым возмущениям путем введения в закон управления сигнала, пропорционального отклонению скорости полета. Стабилизация скорости полета путем изменения углового положения экраноплана позволяет сократить время от начала действия возмущения до того момента, когда система управления начнет ему противодействовать по сравнению со стабилизацией скорости полета путем воздействия на сектор газа.
Однако сигнал, пропорциональный скорости полета, в законе управления нарастает достаточно медленно и не позволяет в начальный момент времени эффективно противодействовать ветровым возмущениям.
Ставится задача уменьшения отклонения высоты полета от опорного значения под действием возмущений, вызванных порывами ветра.
Поставленная задача достигается тем, что в устройство одноканального управления продольным движением легкого экраноплана, содержащее датчик отклонения угла тангажа от опорного значения, выход которого соединен с первым входом суммирующего усилителя, датчик угловой скорости, выход которого соединен со вторым входом суммирующего усилителя, датчик линейной скорости, рулевой агрегат, непосредственно воздействующий на руль высоты, вход которого соединен с выходом суммирующего усилителя, дополнительно введены датчик линейного ускорения и блок формирования нелинейного управляющего сигнала, первый вход которого соединен с выходом датчика линейной скорости, второй вход соединен с выходом датчика линейного ускорения, выход соединен с третьим входом суммирующего усилителя, при этом закон управления рулем высоты имеет вид
δ в=(K+iΔ ViaxK2ΔV)ax+iϑ Δ ϑ +iω ω z,
где δ в - отклонение руля высоты; Δ V - отклонение скорости от опорного значения; Δ ϑ - отклонение угла тангажа от опорного значения; ω z - значение угловой скорости,
 , iΔ V, iϑ , iω , K1, K2 - постоянные передаточные коэффициенты, аx - значение линейного ускорения.
, iΔ V, iϑ , iω , K1, K2 - постоянные передаточные коэффициенты, аx - значение линейного ускорения.
Блок формирования нелинейного управляющего сигнала содержит последовательно соединенные первый блок умножения, релейный блок, первый блок усиления, а также второй блок умножения, сумматор и третий блок умножения, первый и второй входы которого соединены со вторым и первым входами первого блока умножения, а выход соединен с входом второго блока усиления, выход которого соединен со вторым входом сумматора, первый вход которого соединен с выходом второго блока умножения, первый вход которого соединен с выходом первого блока усиления, а второй вход соединен со вторым входом первого блока умножения, при этом первый и второй входы первого блока умножения являются первым и вторым входами блока формирования нелинейного управляющего сигнала, выходом которого является выход сумматора.
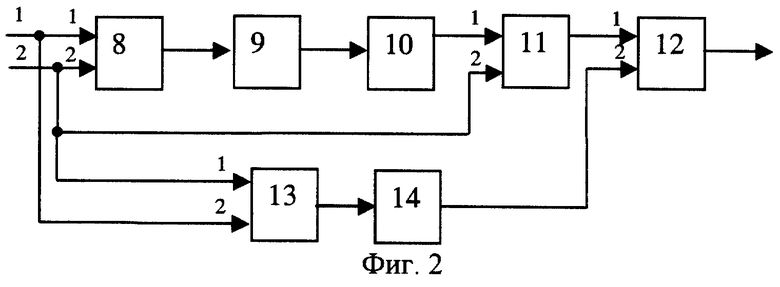
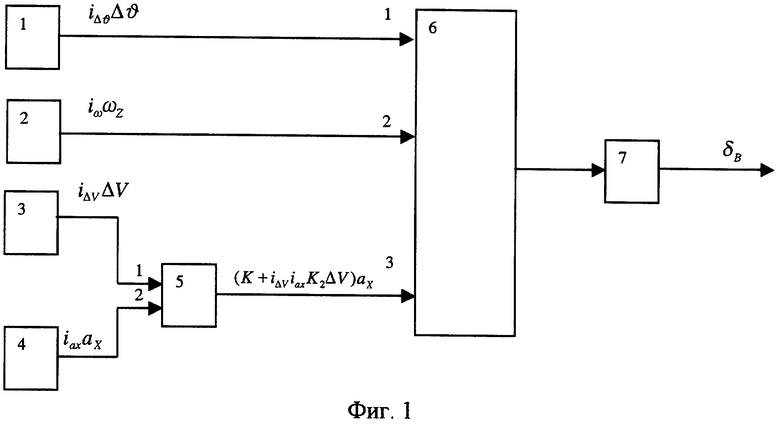
Сущность изобретения поясняется на фиг.1 и фиг.2. На фиг.1 представлена блок-схема устройства управления продольным движением легкого экраноплана; на фиг.2 - блок-схема реализации блока формирования нелинейного управляющего сигнала.
Устройство содержит:
1 - датчик отклонения угла тангажа от опорного значения;
2 - датчик угловой скорости;
3 - датчик линейной скорости;
4 - датчик линейного ускорения;
5 - блок формирования нелинейного управляющего сигнала;
6 - суммирующий усилитель;
7 - рулевой агрегат.
Приняты следующие обозначения:
iΔ ϑ Δ ϑ - сигнал, снимаемый с датчика отклонения угла тангажа от опорного значения 1;
iω ω z - сигнал, снимаемый с датчика угловой скорости 2;
iΔ VΔV - сигнал, снимаемый с датчика линейной скорости 3;
iaxax - сигнал, снимаемый с датчика линейного ускорения 4;
δ в - угол поворота руля высоты.
Выход датчика отклонения угла тангажа от опорного значения 1 соединен с первым входом суммирующего усилителя 6, с вторым и третьим входами которого соединены соответственно выходы датчика угловой скорости 2 и блока формирования нелинейного управляющего сигнала 5. Первый и второй входы блока формирования нелинейного управляющего сигнала 5 соединены соответственно с выходом датчика линейной скорости 3 и выходом датчика линейного ускорения 4. Выход суммирующего усилителя 6 соединен с входом рулевого агрегата 7, который непосредственно воздействует на руль высоты. Блок формирования нелинейного управляющего сигнала (фиг.2) содержит:
8 - первый блок умножения;
9 - релейный блок;
10 - первый блок усиления;
11 - второй блок умножения;
12 - сумматор;
13 - третий блок умножения;
14 - второй блок усиления.
Блок формирования нелинейного управляющего сигнала 5 содержит последовательно соединенные первый блок умножения 8, релейный блок 9, первый блок усиления 10, а также второй блок умножения 11, сумматор 12 и третий блок умножения 13, первый и второй входы которого соединены со вторым и первым входами первого блока умножения 8, а выход соединен с входом второго блока усиления, выход которого соединен со вторым входом сумматора 12, первый вход которого соединен с выходом второго блока умножения 11, первый вход которого соединен с выходом первого блока усиления 10, а второй вход соединен со вторым входом первого блока умножения 8, при этом первый и второй входы первого блока умножения 8 являются первым и вторым входами блока формирования нелинейного управляющего сигнала 5, выходом которого является выход сумматора 12.
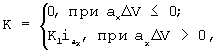
Работа устройства происходит следующим образом. Сигналы с датчика отклонения угла тангажа от опорного значения 1 и датчика угловой скорости 2 поступают на первый и второй входы суммирующего усилителя 6 соответственно. В первый момент времени после начала действия возмущающего воздействия сигнал, пропорциональный линейному ускорению, измеряемый датчиком 4, нарастает очень динамично и значительно превышают изменение сигнала, пропорционального отклонению линейной скорости экраноплана от опорного значения, который измеряется датчиком 3. Это происходит благодаря достаточно большой инерционности экраноплана. Чтобы уменьшить отклонение высоты полета от опорного значения под действием возмущения, необходимо уменьшить время между началом действия возмущения и эффективного противодействия ему системы управления экраноплана. Для этого вводится блок формирования нелинейного управляющего сигнала 5, работа которого происходит следующим образом. На первый вход первого блока умножения 8, который является первым входом блока формирования нелинейного управляющего сигнала 5, поступает сигнал с датчика 3, пропорциональный отклонению скорости полета от опорного значения. На второй вход первого блока умножения 8, который является вторым входом блока формирования нелинейного управляющего сигнала 5, поступает сигнал с датчика 4, пропорциональный линейному ускорению. С выхода первого блока умножения 8 произведение этих сигналов поступает на вход релейного блока 9. Работа релейного блока 9 описывается следующим уравнением:
где х - сигнал на входе релейного блока 9; у - сигнал на его выходе.
Полученное значение через первый блок усиления 10, коэффициент передачи которого равен К1, поступает на первый вход второго блока умножения 11. На второй вход второго блока умножения 11, соединенный со вторым входом первого блока умножения 8, поступает сигнал, пропорциональный линейному ускорению. Таким образом, на выходе второго блока умножения 11 будет либо нулевой сигнал, в случае противоложности знаков линейного ускорения и скорости полета, либо сигнал, пропорциональный линейному ускорению. Сформированный управляющий сигнал уменьшает время отклика системы управления на возмущающие воздействия, вызванные одиночными порывами ветра. Тем самым существенно уменьшается отклонение высоты полета экраноплана от опорного значения. С выхода второго блока умножения 11 сигнал поступает на первый вход сумматора 12. Для противодействия интенсивным ветровым возмущениям с большой частотой разнонаправленных порывов на выходе третьего блока умножения 13 формируется управляющий сигнал, равный произведению сигналов, пропорциональных линейному ускорению и отклонению скорости от опорного значения, которые поступают на первый и второй входы третьего блока умножения 13 со второго и первого входов блока формирования нелинейного управляющего сигнала 5 соответственно. С выхода третьего блока умножения 13 сигнал через второй блок усиления 14, коэффициент передачи которого равен К2, поступает на второй вход сумматора 12. Сумматором 12, выход которого является выходом блока формирования нелинейного управляющего сигнала 5, производится суммирование поступающих на его входы сигналов. Совокупность поступающих на вход сумматора 12 управляющих сигналов позволяет эффективно противодействовать как одиночным порывам ветра, так и сериям разнонаправленных порывов. Таким образом, на выходе блока формирования нелинейного управляющего сигнала 5 формируется сигнал вида (K+iΔ ViaxK2ΔV)aX.
С выхода блока формирования нелинейного управляющего сигнала 5 сигнал поступает на третий вход суммирующего усилителя 6. С выхода суммирующего усилителя 6 сформированный управляющий сигнал поступает на рулевой агрегат 7, который непосредственно воздействует на руль высоты, отклоняя его в направлении противодействия внешнему возмущению.
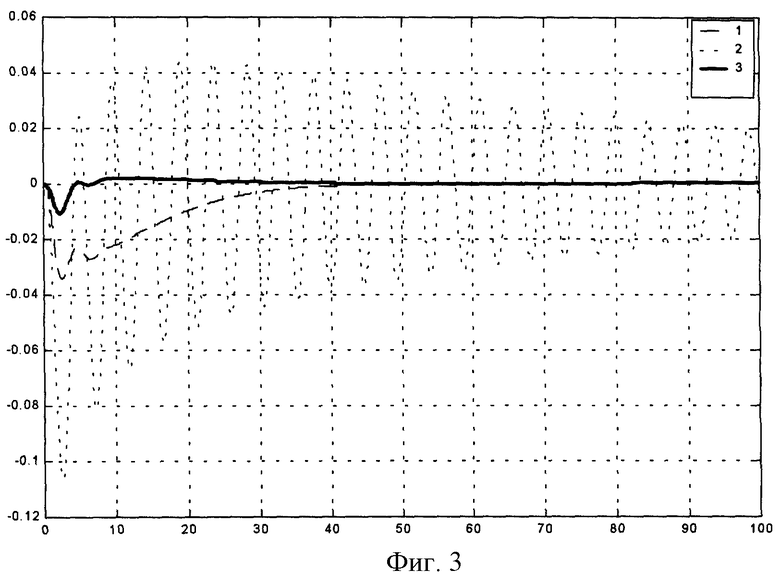
Таким образом, если экраноплан начнет отклоняться от опорного значения воздушной скорости полета и, как следствие, от опорного значения высоты полета под действием ветровых возмущений, то сигнал с выхода блока формирования нелинейного управляющего сигнала будет стремиться уменьшить это отклонение. Это утверждение наглядно иллюстрируется графиком переходных процессов, представленным на фиг.3. Этот график получен в результате математического моделирования на ЭВМ системы "Экраноплан - Система управления" при учете инерционных свойств рулевого агрегата экраноплана и ограничений на отклонение руля высоты. В качестве возмущения был взят кратковременный попутный горизонтальный порыв ветра с амплитудой 5 м/с, вызывающий просадку экрноплана. Цифрой 1 обозначен переходный процесс при использовании устройства-прототипа, цифрой 2 - переходный процесс экраноплана при отсутствии системы управления, цифрой 3 - переходный процесс при использовании предлагаемого устройства. Значительное уменьшение отклонения относительной высоты полета от опорного значения достигается выбором передаточных коэффициентов К1, К2.
Устройство включает в себя простые в реализации схемы и характеризуется малыми габаритными размерами и небольшим энергопотреблением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2000 |
|
RU2180131C1 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2001 |
|
RU2225636C2 |
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СТАБИЛИЗИРУЕМЫМ ПАРАМЕТРОМ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2208243C1 |
| Устройство демпфирования продольных колебаний экраноплана по углу тангажа | 2015 |
|
RU2634660C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
Изобретение относится к системам автоматического регулирования полета. Устройство содержит датчики отклонения угла тангажа и угловой скорости, соединенные с входами суммирующего усилителя, датчики линейной скорости и линейного ускорения, соединенные с входами блока формирования нелинейного управляющего сигнала, выход которого соединен с входом суммирующего усилителя. Сигнал с суммирующего усилителя подается на рулевой агрегат, непосредственно воздействующий на руль высоты. Изобретение позволяет противодействовать ветровым возмущениям путем введения в закон управления сигнала, пропорционального отклонению скорости полета. 1 з.п. ф-лы, 3 ил.
δ в=(К+iΔ ViaxK2ΔV)ax+iϑ Δ ϑ +iω ω z,
где δ в - отклонение руля высоты;
Δ V - отклонение скорости от опорного значения;
Δ ϑ - отклонение угла тангажа от опорного значения;
ω z - значение угловой скорости,
 , iΔ V, iϑ , iω , K1, K2 - постоянные передаточные коэффициенты;
, iΔ V, iϑ , iω , K1, K2 - постоянные передаточные коэффициенты;
а - значение линейного ускорения.
| СПОСОБ ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2000 |
|
RU2180131C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2057686C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА СХЕМЫ "УТКА" С КРЫЛОМ ОБРАТНОЙ СТРЕЛОВИДНОСТИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1984 |
|
SU1830843A1 |
| US 3476335 A, 04.11.1969 | |||
| RU 2070729 C1, 20.12.1996. | |||

