Изобретение способ относится к области техники измерений колебаний вращающегося ротора (прецессионные, осевые и т.п.).
При вращении ротора могут возникать его регулярные колебания, которые в ряде случаев приводят к повреждениям машин. Появление колебаний может отражать как определенные режимы эксплуатации, так и дефекты отдельных узлов. В связи с этим, особенно на высокоскоростных центрифугах, есть необходимость регистрации колебаний ротора.
Эта проблема может быть решена путем установки специальных датчиков перемещений, вибраций [1]. Обычно параметры центрифуг выбирают такими, чтобы в рабочем диапазоне эксплуатационных параметров колебания с частотой вращения, вызванные дисбалансом, были минимальными, а другие колебания отсутствовали, и в этих центрифугах нет необходимости непрерывного контроля. Поэтому установка на такие центрифуги отдельных датчиков, ведущая к дополнительным затратам, нецелесообразна. К тому же конструкция датчиков может быть достаточно сложной из-за необходимости работы в агрессивных средах, вакууме, при повышенных температурах и т.п.
Наиболее близким техническим решением к предложенному является решение [2]. Согласно этому решению на центрифугу устанавливают по меньшей мере один датчик колебаний, причем считают преимуществом установку датчика вне рабочей камеры, т. е. на корпусе. При работе центрифуги проводят частотный анализ сигнала этого датчика. В спектре сигнала датчика колебаний будут присутствовать гармоники с частотой вращения и частотами других колебаний центрифуги. Из спектра выделяют отдельные гармонические колебания и по ним определяют интенсивность (амплитуду) колебаний центрифуги.
Техническое решение [2] имеет ряд недостатков. Во-первых, необходима установка дополнительного датчика колебаний, приводящая к дополнительным затратам. Во-вторых, рассматривают в спектре только гармоники с частотами выбранных гармонических колебаний, что не позволяет определить вид колебаний и в большинстве случаев имеет низкую чувствительность. В-третьих, датчик располагается фактически вне рабочей камеры и фиксирует колебания корпуса, передаваемые ему ротором через опоры. В этом случае амплитуды гармоник с частотами колебаний хотя и связана с интенсивностью колебаний ротора, однако на эту связь существенно влияет опора, состояние которой может меняться в процессе эксплуатации.
Если датчик колебаний является дополнительным, то датчик скорости вращения есть практически у каждой центрифуги. Наибольшее распространение получили импульсные тахометры угловой скорости, основу которых составляют различные датчики близости или оптические датчики [1]. Для работы этих датчиков требуется, чтобы на вращающемся теле находились в движении одна или несколько меток с резкими изменениями магнитных или оптических свойств. Большинство реальных конструкций таких датчиков чувствительны к изменениям расстояния между их вращающейся и неподвижной частями, что приводит к появлению модуляции основного сигнала датчика, частота которого определяется частотой вращения и числом меток. При наличии колебаний ротора сигнал модулируется частотой колебаний, а уровень модуляции связан с амплитудой колебаний.
Известно, что в спектре сигнала, модулированного по амплитуде или по фазе, около основной частоты на расстояниях модулирующей частоты присутствуют симметричные боковые полосы, при одновременной амплитудно-фазовой модуляции с одинаковой частотой симметрия боковых полос нарушается [3].
Техническая задача, решаемая заявляемым изобретением, состоит в том, чтобы упростить технологию определения амплитуд и вида колебаний ротора центрифуги при одновременном увеличении чувствительности измерений.
Поставленная задача решается тем, что в известном способе определения частоты и интенсивности колебаний центрифуги, включающем получение сигнала датчика колебаний и частотный спектральный анализ этого сигнала для определения интенсивности колебаний, рассматривают в спектре сигналов преимущественно датчиков оборотов частотные составляющие, связанные с амплитудной и фазовой модуляцией, имеющей разный характер при различных видах колебаний ротора, путем измерений амплитуд основной гармоники с частотой Ω и боковых полос с частотами Ω-ωi,Ω+ωi (левая, правая боковые полосы), где ωi - частота i-го вида колебаний.
Уровни и характер модуляции зависят от типов и конструкций датчиков, но во всех случаях в спектрах будут наблюдаться около основной частоты боковые полосы, однозначно связанные с параметрами колебаний, и эта связь может устанавливаться экспериментально или теоретически из рассмотрения схемы движения колеблющейся вращающейся части ротора относительно не вращающегося датчика.
Для электромагнитных датчиков с изменяемым магнитным сопротивлением типа, изображенного на фиг.1, когда в катушке 1 создается переменная электродвижущая сила за счет вращения связанного с ротором индуктора 2 в поле постоянного магнита 3, в случае осевых колебаний амплитуды левой и правой боковых полос равны, в случае круговых (прецессионных) движений - существенно различны. В зависимости от того, какая из боковых полос в паре (правая или левая) больше, определяют направление прецессионных движений. При больших амплитудах колебаний наблюдаются несколько пар боковых полос. Амплитуда колебаний ротора, в пределах линейной зависимости уровней модуляции от амплитуды колебаний, определяют:
- для осевых колебаний
где АВ - амплитуда осевых колебаний; С - определяемая конструкцией датчика постоянная; U1 - значение первой пары боковых полос; МВ - коэффициент амплитудной модуляции при осевом смещении; U0 - значение основной гармоники,
- для круговых движений
где Ак - амплитуда прецессионных движений; Uп, Uл - значение правой и левой пары боковых полос; Мк, Кк - коэффициенты амплитудной и фазовой модуляций при радиальном смещении.
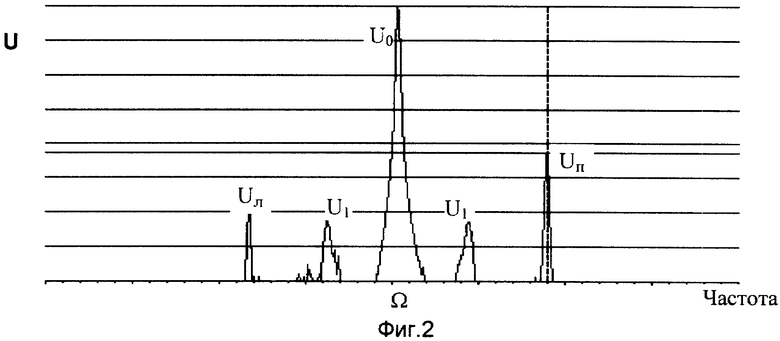
На фиг.2 приведен спектр сигнала датчика оборотов центрифуги с ротором, совершающим осевые колебания и прецессионные движения в направлении своего вращения. Наличие вертикальных колебаний видно из пары боковых полос с одинаковыми амплитудами U1, а наличие прецессии в направлении вращения ротора видно из пары боковых полос с амплитудами Uп, Uл, где Uп>Uл.
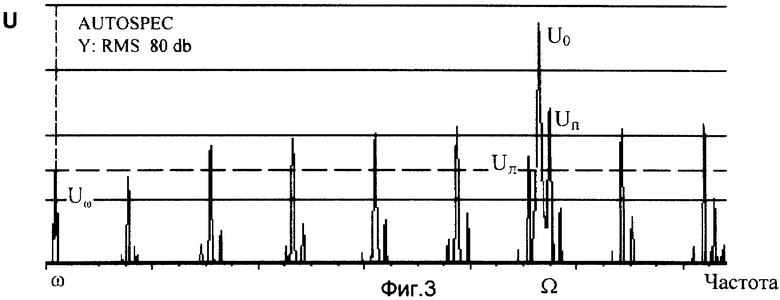
На фиг.3 приведен спектр сигнала датчика оборотов центрифуги с ротором, совершающим прецессионные движения. Наличие фазовой модуляции приводит к тому, что в спектрах типа фиг.3 амплитуда, по меньшей мере, одной полосы в первой паре боковых полос Uп или Uл больше амплитуды гармоники Uω с частотой колебаний ω. В случае фиг.3, где амплитуды гармоник изображены в логарифмическом масштабе и значение Uω отмечено пунктирной линией, Uпбольше Uω в ~8 раз, что свидетельствует о таком же увеличении чувствительности предложенного способа.
Таким образом, благодаря рассмотрению в спектре сигналов датчиков центрифуги, например датчиков оборотов, вызванных модуляцией сигнала с частотой колебаний центрифуги боковых полос около основной гармоники, улучшается технология определения амплитуд колебаний центрифуги, появляется возможность определения вида колебаний при одновременном повышении чувствительности измерений.
Источники информации
1. Ж. Аш. Датчики измерительных систем. М.: Мир, 1992г.
2. Патент ФРГ N 4327291, кл. B 04 B 11/04, 1993.
3. А. Анго. Математика для электро-и радиоинженеров. М.: Наука, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРИФУГА ДЛЯ РАЗДЕЛЕНИЯ ГАЗОВОЙ СМЕСИ | 2001 |
|
RU2217240C2 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ИЗГОТОВЛЕНИЯ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2003 |
|
RU2244271C1 |
| УСТАНОВКА ДЛЯ ТЕРМОМЕХАНИЧЕСКОЙ ОБРАБОТКИ УГЛЕРОДНОГО ВОЛОКНИСТОГО МАТЕРИАЛА В ГАЗОВОЙ АТМОСФЕРЕ | 1999 |
|
RU2175696C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ МНОГОРЯДОВОЙ КАТУШКИ ИЗ КРУГЛОГО ИЗОЛИРОВАННОГО ПРОВОДА | 1998 |
|
RU2146072C1 |
| ИЗМЕРИТЕЛЬ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ АНАЛОГОВЫХ ПЕРЕМНОЖИТЕЛЕЙ СИГНАЛОВ | 2011 |
|
RU2457496C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| АППАРАТ ДЛЯ ТВЕРДОФАЗНОЙ РЕЭКСТРАКЦИИ | 1993 |
|
RU2077361C1 |
| СПОСОБ ПРЯМОГО ФОРМИРОВАНИЯ ОБМОТКИ МНОГОРЯДОВОЙ КАТУШКИ ИЗ КРУГЛОГО ИЗОЛИРОВАННОГО ПРОВОДА | 1998 |
|
RU2137279C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| СПОСОБ ЦИФРОВОГО УПРАВЛЕНИЯ КЛЮЧЕВЫМ ГЕНЕРАТОРНЫМ УСТРОЙСТВОМ УЛЬТРАЗВУКОВОГО ДИАПАЗОНА | 2019 |
|
RU2718003C1 |
Изобретение относится к способам определения параметров колебаний вращающегося ротора центрифуги, преимущественно высокоскоростной, необходимых для выявления эксплуатации параметров центрифуги и дефектов ее узлов. Согласно предложенному способу, частота, амплитуда и вид колебаний определяются из частотного спектра датчика, например датчика оборотов, по значениям боковых полос, вызванных модуляцией основного сигнала частотой колебаний ротора. Способ характеризуется упрощенной технологией определения амплитуд и вида колебаний ротора центрифуги и обеспечивает повышенную чувствительность измерений. 2 з.п. ф-лы. 3 ил.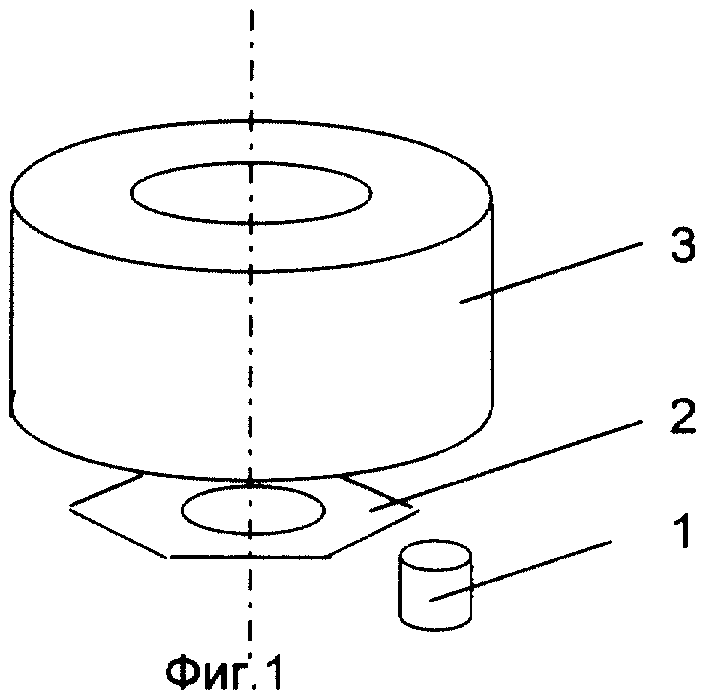

где AB - амплитуда осевых колебаний ротора;
С - определяемая конструкцией датчика постоянная;
U1 - амплитуда гармоник в первой паре боковых полос;
МB - коэффициент амплитудной модуляции при осевом смещении ротора;
U0 - значение основной, кратной частоте вращения ротора, гармоники.

где АК - амплитуда прецессионных движений ротора;
UП, UЛ - амплитуды правой и левой гармоник в первой паре боковых полос;
МК, КК - коэффициенты амплитудной и фазовой модуляций при радиальном смещении ротора;
U0 - амплитуда основной, кратной частоте вращения ротора, гармоники.
| DE 4327291 A1, 16.02.1995 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИСБАЛАНСА | 1994 |
|
RU2078320C1 |
| Инвариантный радиоволновый уровнемер | 1990 |
|
SU1765708A1 |

