Устройство предназначено для записи, хранения, поиска и считывания элементов информации на плоских подложках с использованием сканирующей зондовой микроскопии. Его можно использовать в условиях естественной атмосферы, контролируемой среды, а также от низкого до сверхвысокого вакуума.
Известен электромеханический модуль запоминающего устройства сверхвысокой емкости, содержащий носитель с матрицей зондов, сопряженный с жестким диском с запоминающей средой. Носитель матрицы зондов связан с приводом по координате, перпендикулярной плоскости жесткого диска, а также со сканирующим приводом в плоскости жесткого диска. Жесткий диск сопряжен с приводом вращения в плоскости жесткого диска [1].
Первый недостаток указанного устройства заключаются в использовании жесткого диска круглой формы, в котором мультипликация изображения и сканирование в пределах одного модуля по одной координате осуществляется всем диском с единым приводом. Второй недостаток заключается в консольном закреплении носителя матрицы зондов. Это уменьшает резонансные частоты устройства, ухудшает возможность записи и считывания элементов малых размеров (10-100 нм) и, соответственно, не позволяет при малых габаритах обеспечить сверхвысокую емкость памяти.
Известен также электромеханический модуль запоминающего устройства сверхвысокой емкости, содержащий первый носитель с подложкой с запоминающей средой, сопряженный с тремя линейными приводами по координате, перпендикулярной плоскости подложки, а также с двумя линейными приводами в плоскости подложки, второй носитель с матрицей зондов с системой управления их перемещения и блок управления [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства заключается в сопряжении всех приводов с первым носителем, что усложняет этот узел, снижает надежность считывания элементов, ограничивает возможность их уменьшения, снижает плотность записи и, соответственно, емкость его памяти.
Второй недостаток заключается в использовании двух линейных приводов в плоскости подложки, что не позволяет осуществлять разворот подложки с запоминающей средой относительно матрицы зондов, что увеличивает минимальный размер элемента, снижает надежность работы устройства и емкость его памяти.
Третий недостаток заключается в отсутствии мультипликации матрицы зондов относительно подложки с запоминающей средой, что снижает емкость памяти запоминающего устройства.
Техническая задача изобретения заключается в повышении плотности записи и емкости памяти запоминающего устройства.
Это достигается тем, что в электромеханический модуль запоминающего устройства сверхвысокой емкости, содержащий первый носитель с подложкой с запоминающей средой, установленный на первой платформе и сопряженный с тремя линейными приводами по координате, перпендикулярной плоскости подложки, второй носитель с матрицей зондов с системой управления их перемещением по координате перпендикулярной плоскости подложки, установленный на второй платформе, первый и второй линейные приводы по взаимоперпендикулярным направлениям в плоскости подложки и блок управления, введены третий и четвертый линейные приводы по взаимно перпендикулярным направлениям в плоскости подложки, причем первый, второй, третий и четвертый линейные приводы в плоскости подложки закреплены на второй платформе и сопряжены посредством первого, второго, третьего и четвертого упругих элементов со вторым носителем, а параллельные оси их перемещения смещены относительно друг друга, четыре датчика контроля линейного перемещения, закрепленные на второй платформе и сопряженные со вторым носителем, три регулятора положения первой платформы и захваты первой платформы, установленные на второй платформе и сопряженные с первой платформой, устройство перемещения и фиксации в n - положениях первой платформы относительно второй платформы, установленное на второй платформе и сопряженное с первой платформой, систему контроля перемещения подложки относительно матрицы зондов в плоскости подложки с запоминающей средой и блок активной термокомпенсации линейных размеров подложки относительно матрицы зондов, состоящий из устройства анализа рассогласования и устройства обработки рассогласования, выполненного в виде двух нагревателей, сопряженных с подложкой и матрицей зондов.
Возможен вариант, в котором три линейных привода по координате, перпендикулярной плоскости подложки, выполнены в виде первого, второго и третьего пьезобиморфов, одним концом закрепленных на первой платформе, а другим - через пятый, шестой и седьмой упругие элементы на первом носителе.
Существует вариант повышенной жесткости, где каждый пьезобиморф выполнен в виде сектора, закрепленного внешней частью на первой платформе, а внутренней - на первом носителе.
Целесообразно использовать устройство перемещения, где первый, второй, третий и четвертый линейные приводы в плоскости подложки выполнены, как минимум, из одного четвертого, пятого, шестого и седьмого пьезобиморфов каждый, одним концом закрепленных на второй платформе, а другим - на втором носителе или в виде круглого пьезобиморфа каждый, закрепленного по периферии на второй платформе, а центральной частью - на втором носителе, или в виде пьезопакетов, при этом первый, второй, третий и четвертый упругие элементы могут быть выполнены О-образными.
Возможен вариант, где датчики контроля перемещения выполнены в виде емкостных или индуктивных датчиков, расположенных по осям перемещения первого, второго, третьего и четвертого линейных приводов.
Существуют варианты, где каждый регулятор положения первой платформы выполнен в виде винтовой опоры, установленной винтовой частью на второй платформе, а торцом сопряженной с первой платформой, или пьезотрубки с осевым перемещением, одним концом установленной на второй платформе, а другим, сопряженным с первой платформой, или пьезотрубки с перемещением в плоскости, перпендикулярной ее оси, или пьезотрубки с осевым перемещением и в плоскости, перпендикулярной ее оси.
Целесообразно выполнение захватов, где они состоят из первого, второго и третьего электромагнитов, закрепленных на второй платформе, и первых ферромагнитных вставок, закрепленных на первой платформе и находящихся во взаимодействии с электромагнитами, либо, где четвертый, пятый и шестой электромагниты расположены внутри пьезотрубок.
Возможно выполнение устройства перемещения и фиксации в четырех положениях первой платформы относительно второй платформы в виде седьмого - двенадцатого электромагнитов и вторых ферромагнитных вставок, закрепленных на первой платформе и находящихся во взаимодействии с электромагнитами, а также, где оно выполнено в виде трех шаговых приводов с винтовыми толкателями и пружинными упорами, закрепленными на второй платформе и сопряженными с первой платформой.
Существует вариант, в котором система контроля перемещения подложки относительно матрицы зондов содержит три зонда, расположенных по краям матрицы зондов и три реперных знака в запоминающей среде подложки, сопряженных с зондами и представляющих собой три набора первых штрихов, в каждом из которых расположен, как минимум, один штрих, причем, два набора штрихов параллельны друг другу, а один им перпендикулярен, либо содержит три лазерных интерферометра, закрепленных на второй платформе и оптически сопряженных с первой платформой.
Возможно также выполнение устройства анализа рассогласования в виде двух термопар с измерительным блоком, соединенных с подложкой и матрицей зондов, либо в виде, как минимум, трех вторых штрихов, расположенных перпендикулярно трем первым штрихам и сопряженных с зондами, расположенными по краям матрицы зондов.
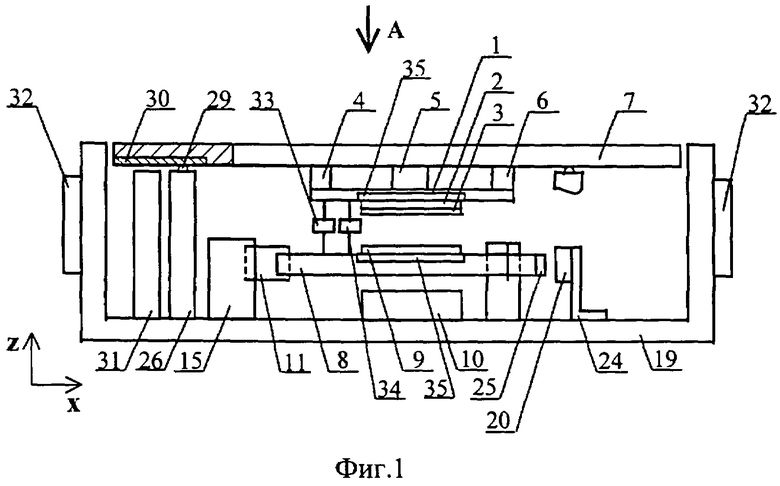
На фиг.1 изображен электромеханический модуль запоминающего устройства сверхвысокой (терабитной) емкости (вид сбоку).
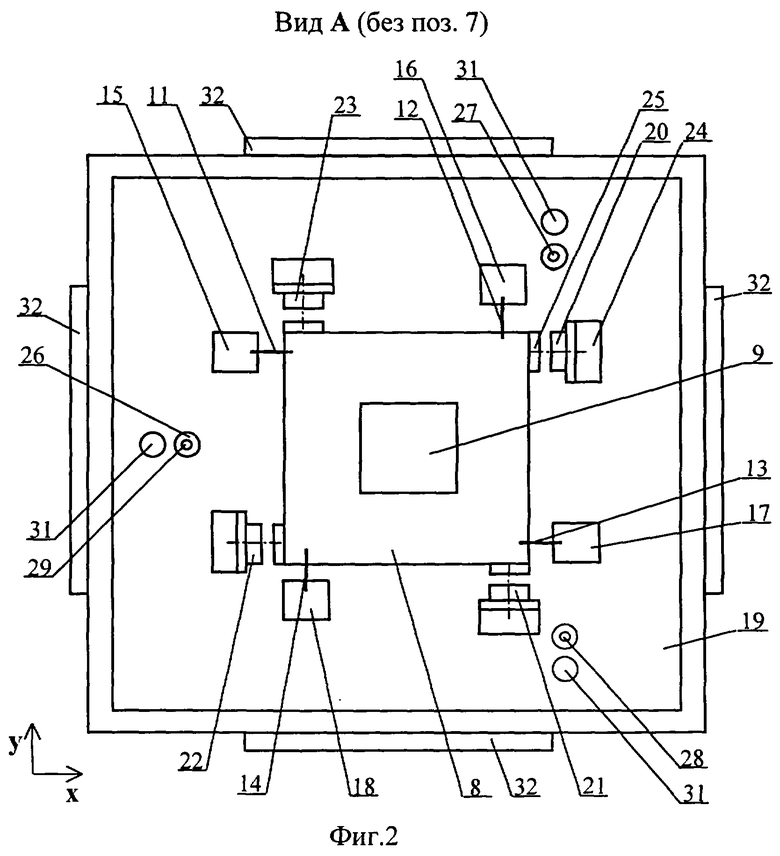
На фиг.2 - электромеханический модуль (вид сверху).
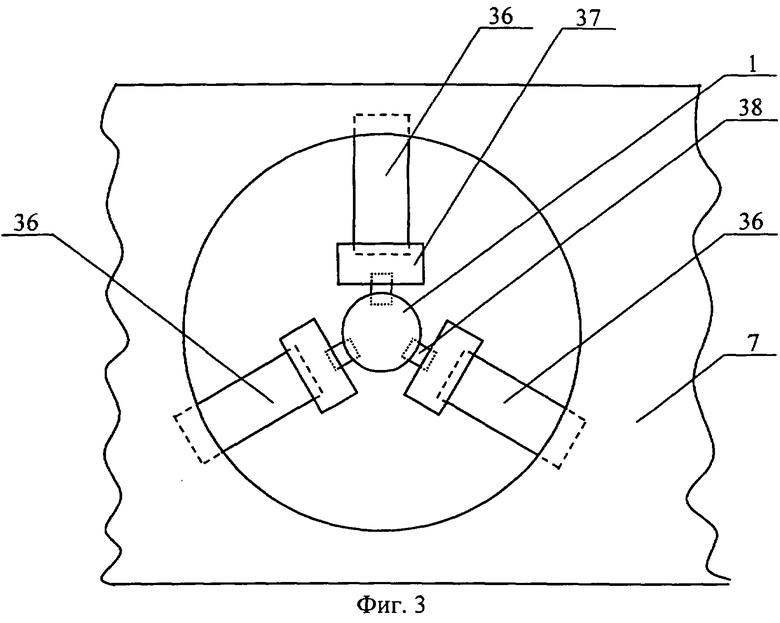
На фиг.3 - линейные приводы по координате Z, состоящие из плоских пьезобиморфов.
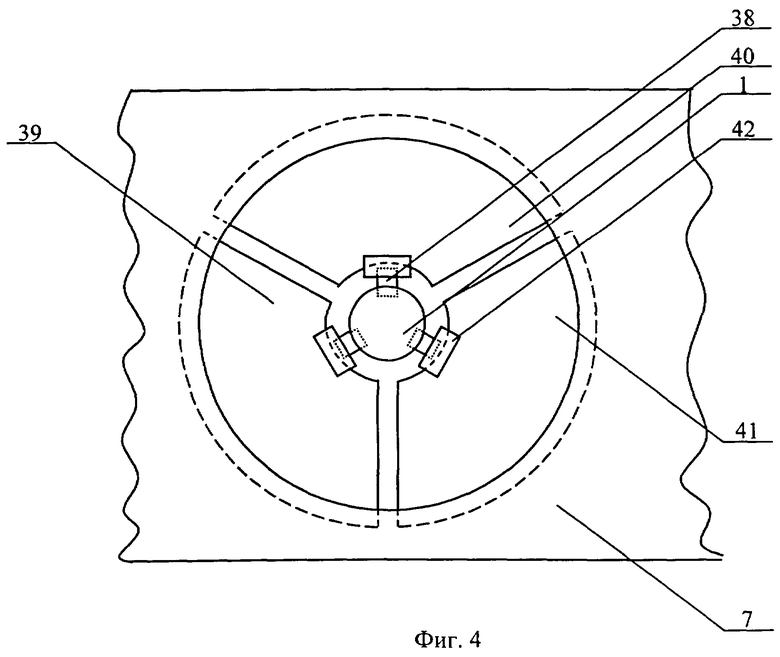
На фиг.4 - линейные приводы по координате Z, состоящие из секторных пьезобиморфов.
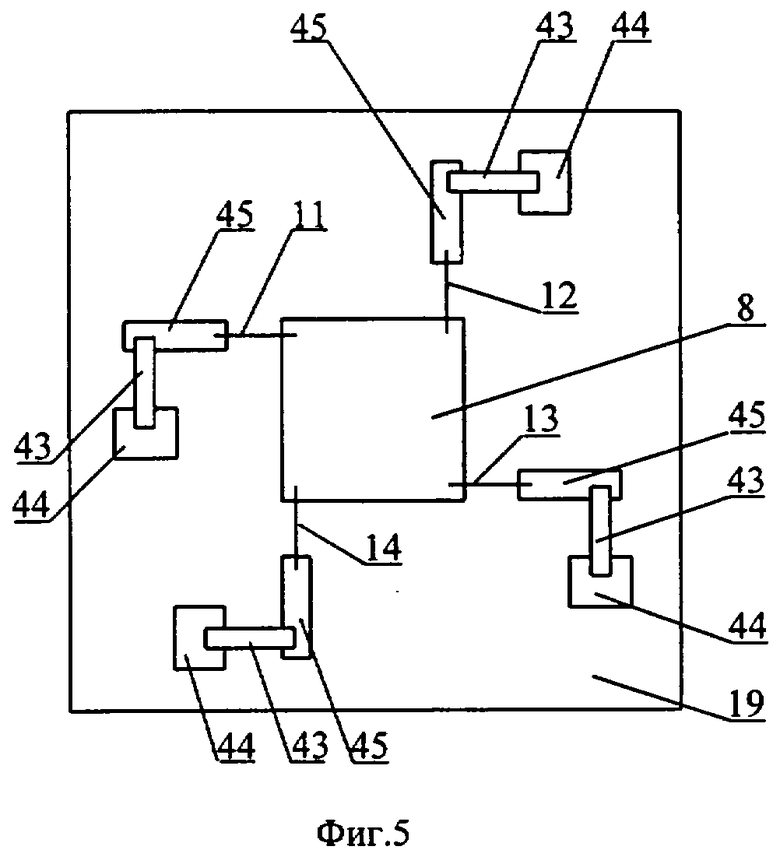
На фиг.5 - линейные приводы в плоскости XY, состоящие из плоских пьезобиморфов.
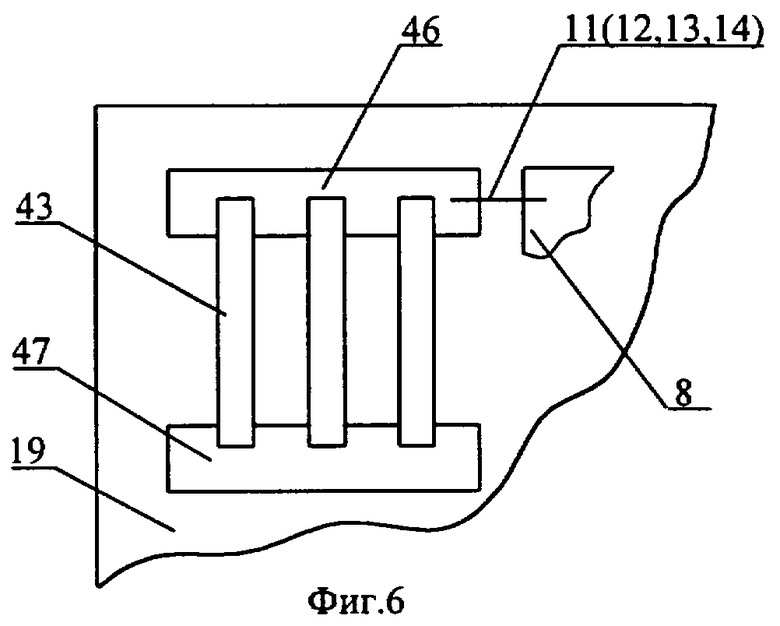
На фиг.6 - пакетное выполнение линейного привода в плоскости XY на основе плоских пьезобиморфов.
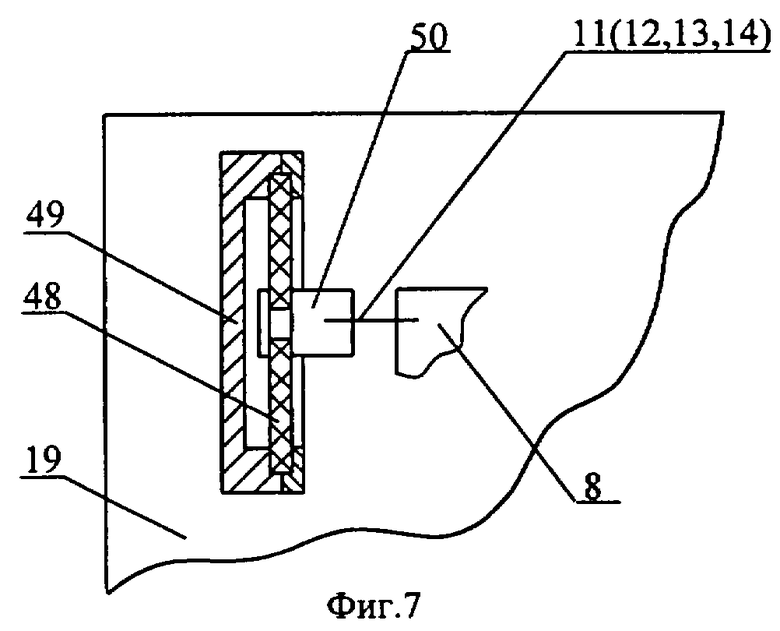
На фиг.7 - линейный привод в плоскости XY, состоящий из круглых пьезобиморфов.
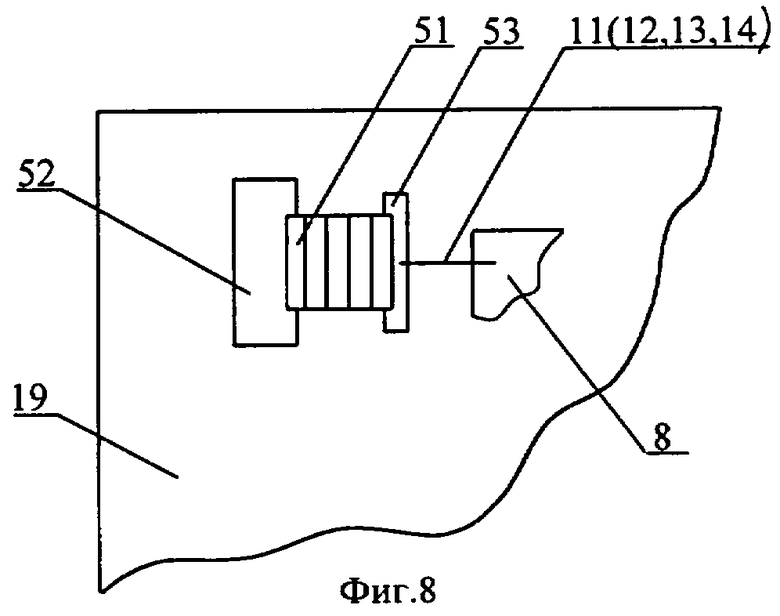
На фиг.8 - линейный привод в плоскости XY, состоящий из пьезопакетов.
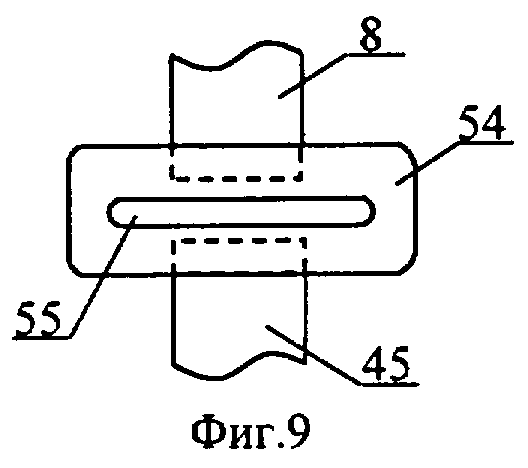
На фиг.9 - О-образное выполнение упругих элементов.
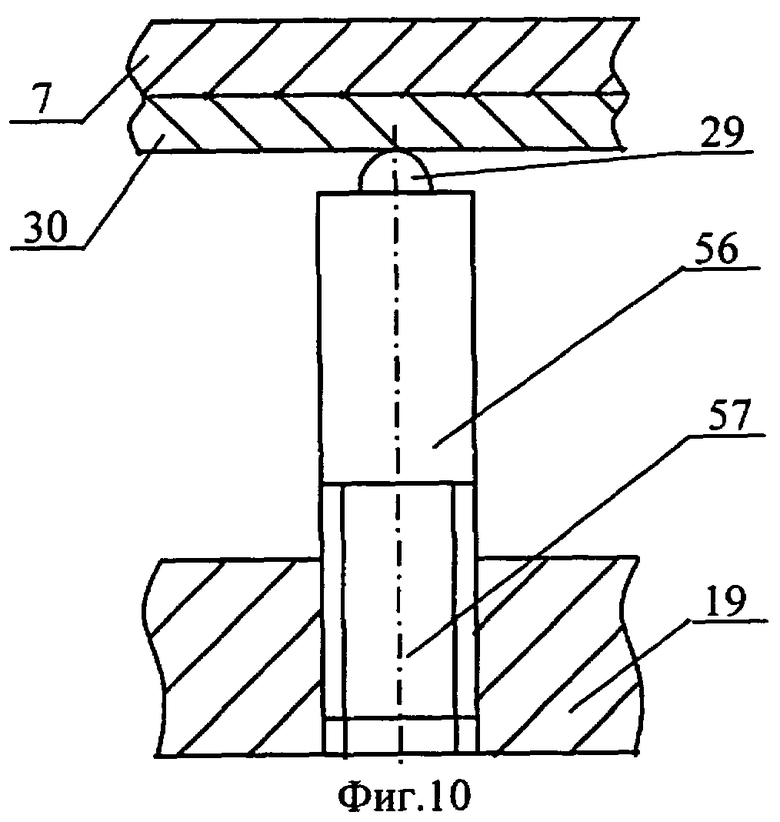
На фиг.10 - винтовые регуляторы положения.
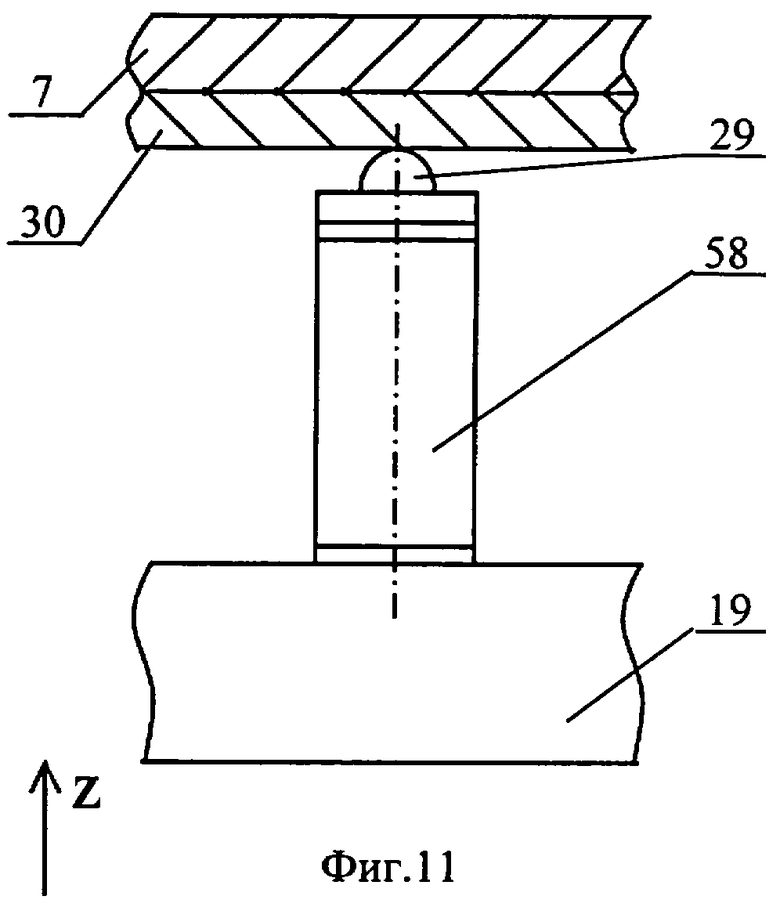
На фиг.11 - регуляторы положения, выполненные из пьезотрубок с Z-перемещением.
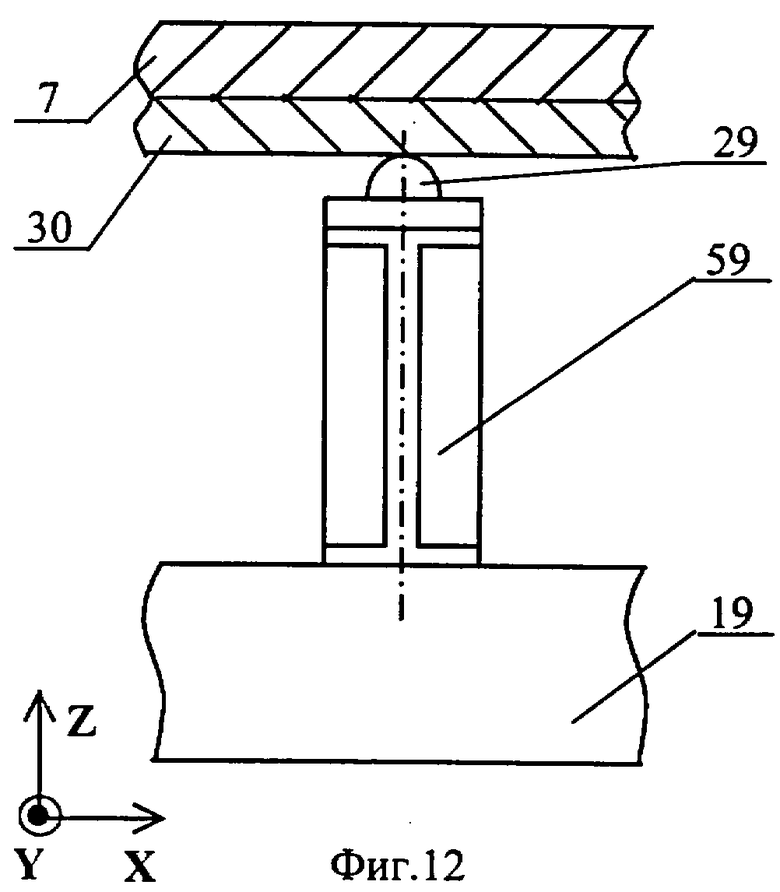
На фиг.12 - регуляторы положения из пьезотрубок с X, Y - перемещением.
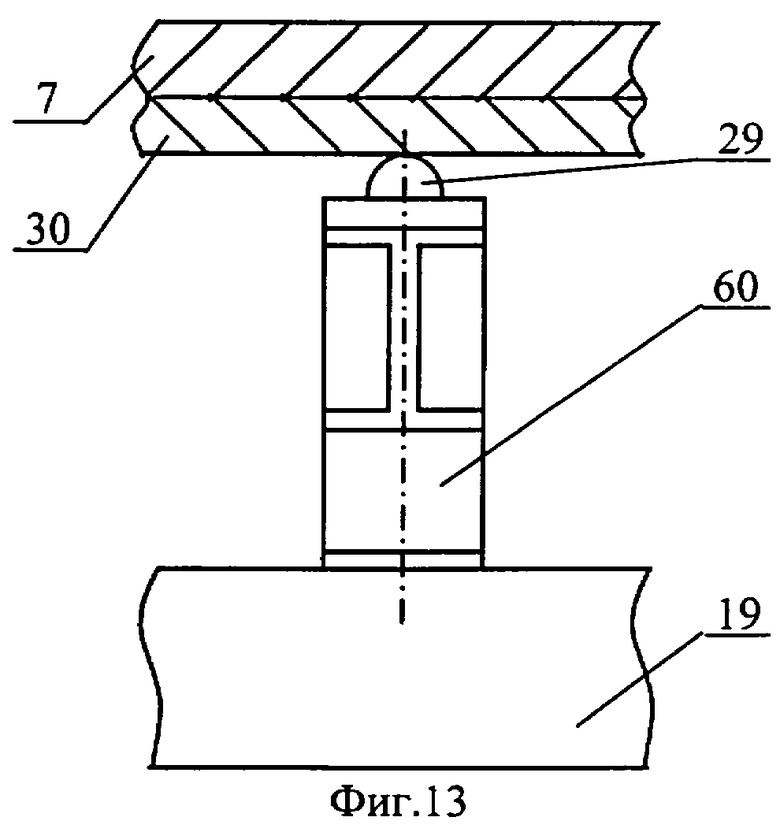
На фиг.13 - регуляторы положения из пьезотрубок с X, Y, Z - перемещением.
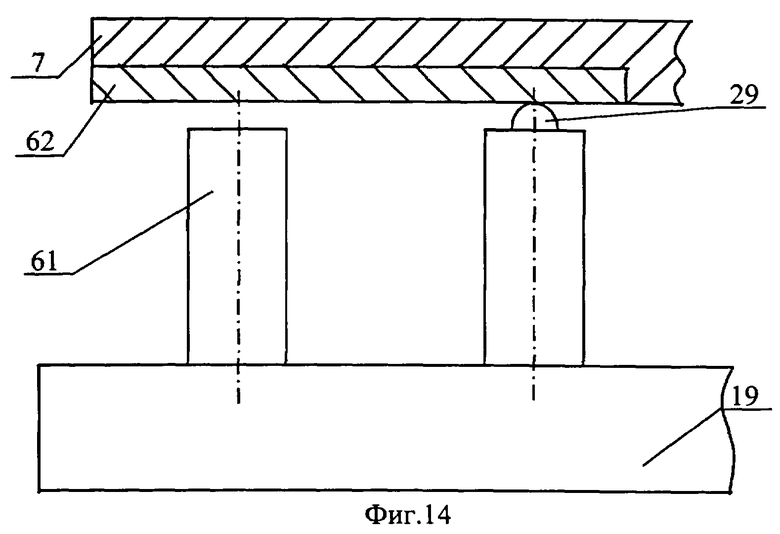
На фиг.14 - электромагнитные захваты первой платформы.
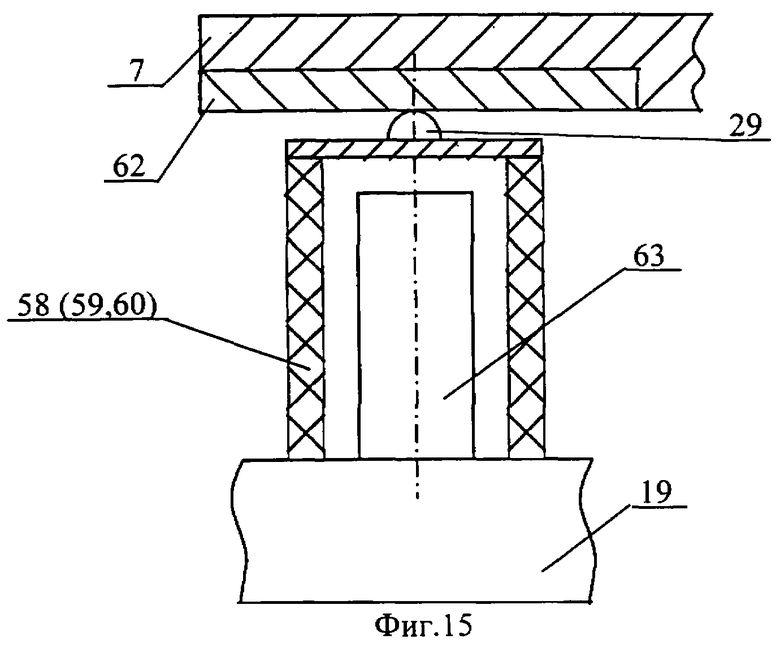
На фиг.15 - электромагнитные захваты первой платформы, сопряженные с пьезотрубками.
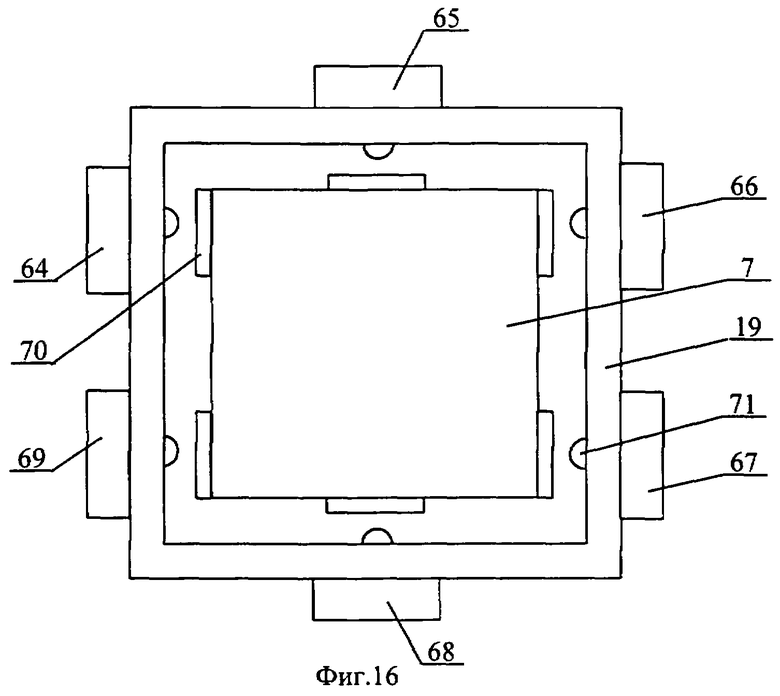
На фиг.16 - электромагнитное устройство перемещения и фиксации первой платформы.
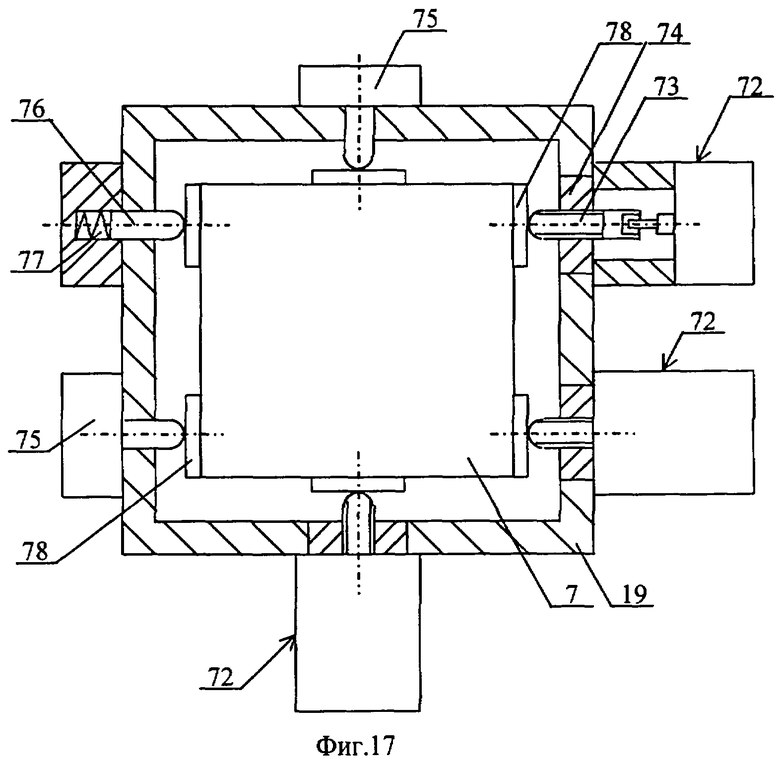
На фиг.17 - устройство перемещения и фиксации первой платформы на шаговых приводах.
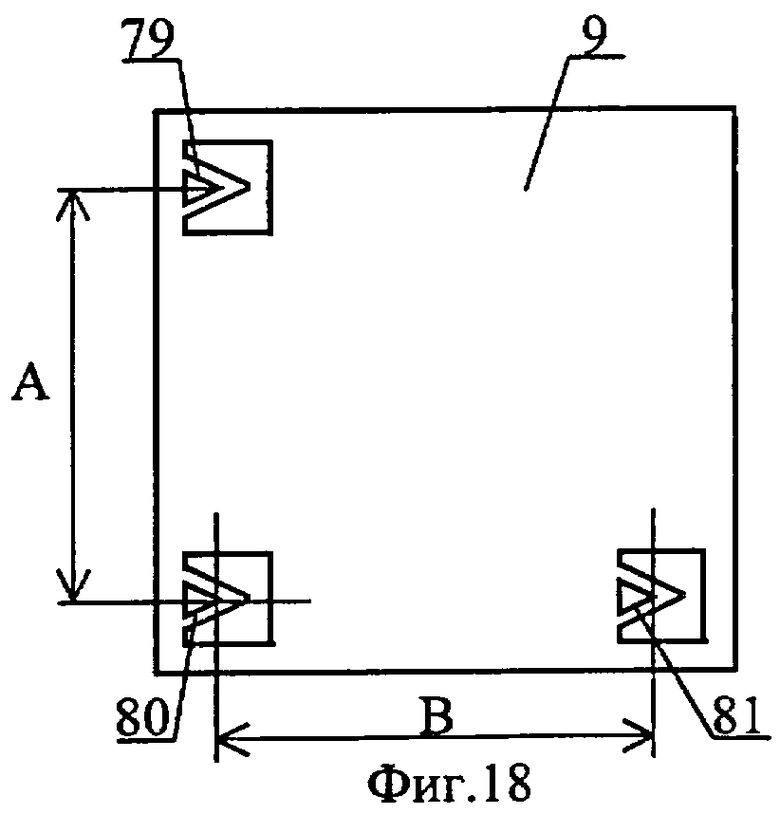
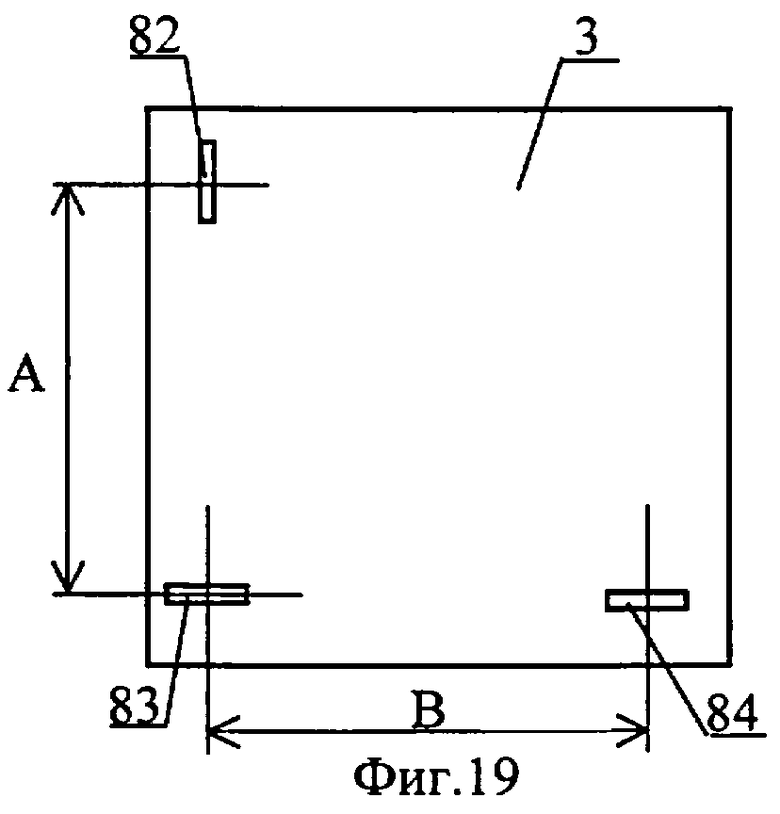
На фиг.18, фиг.19 - система контроля перемещения подложки по реперным знакам.
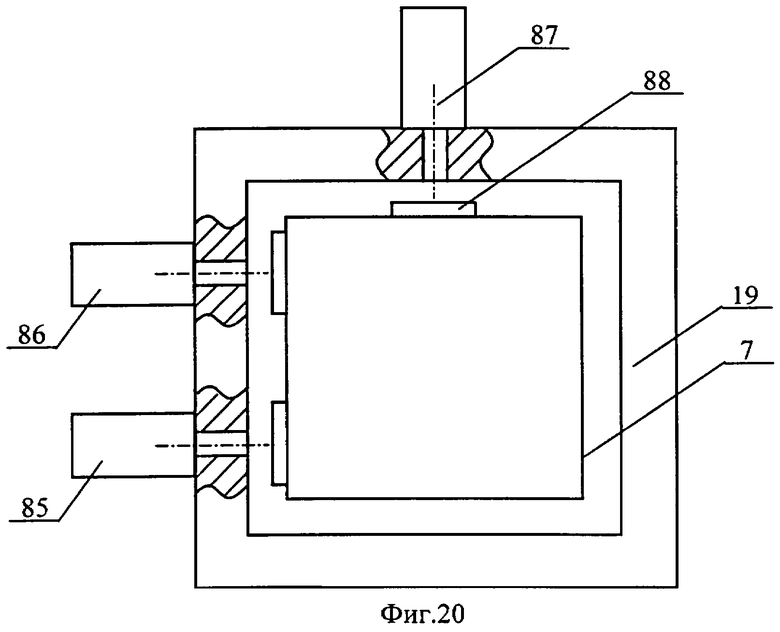
На фиг.20 - интерферометрическая система контроля перемещения подложки.
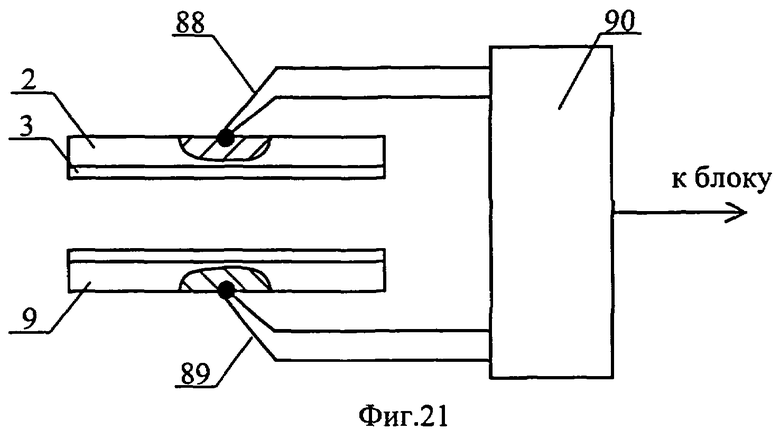
На фиг.21 - блок активной термокомпенсации рассогласования линейных размеров подложки на термопарах.
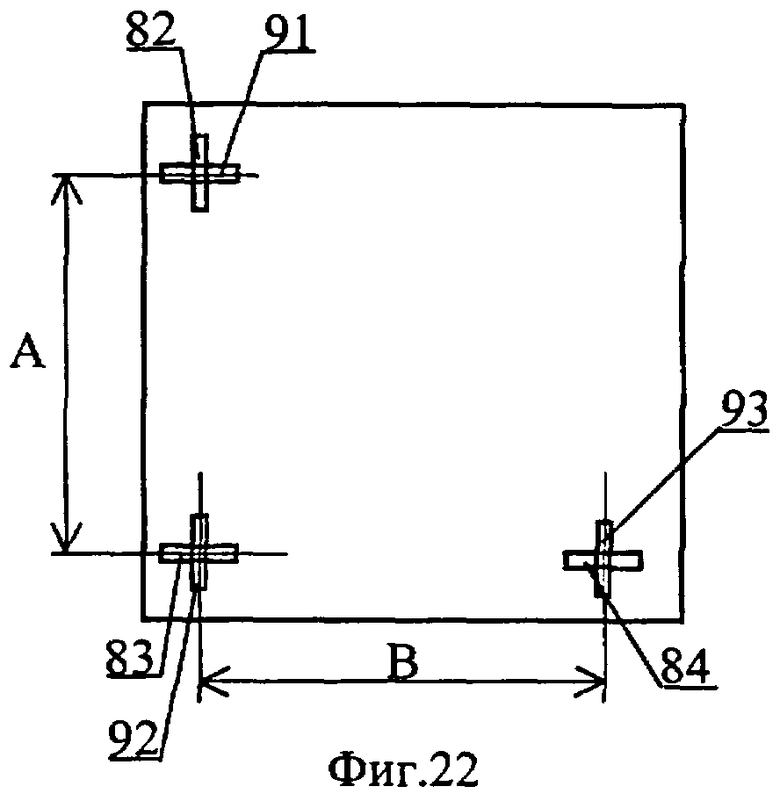
На фиг.22 - блок активной термокомпенсации рассогласования линейных размеров подложки на реперных знаках.
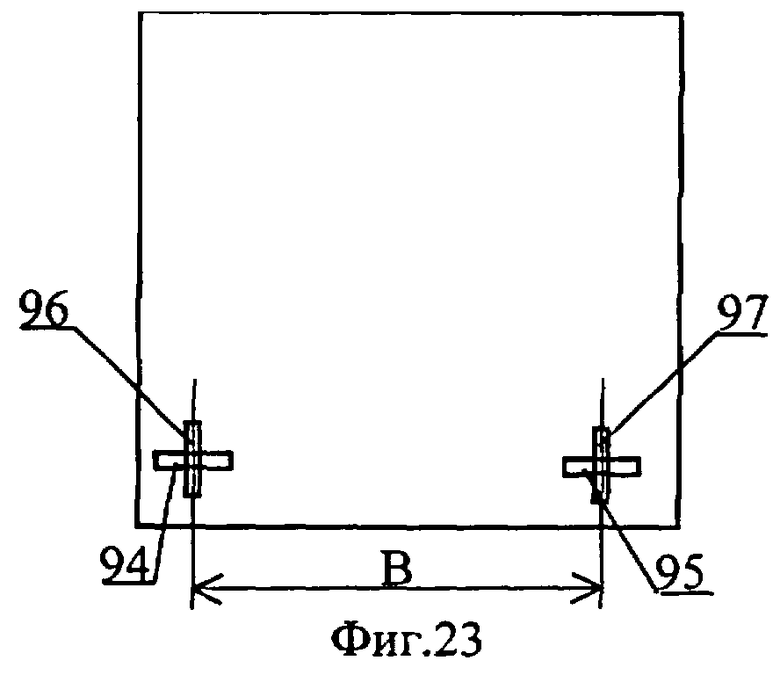
На фиг.23 - упрощенный вариант блока активной термокомпенсации.
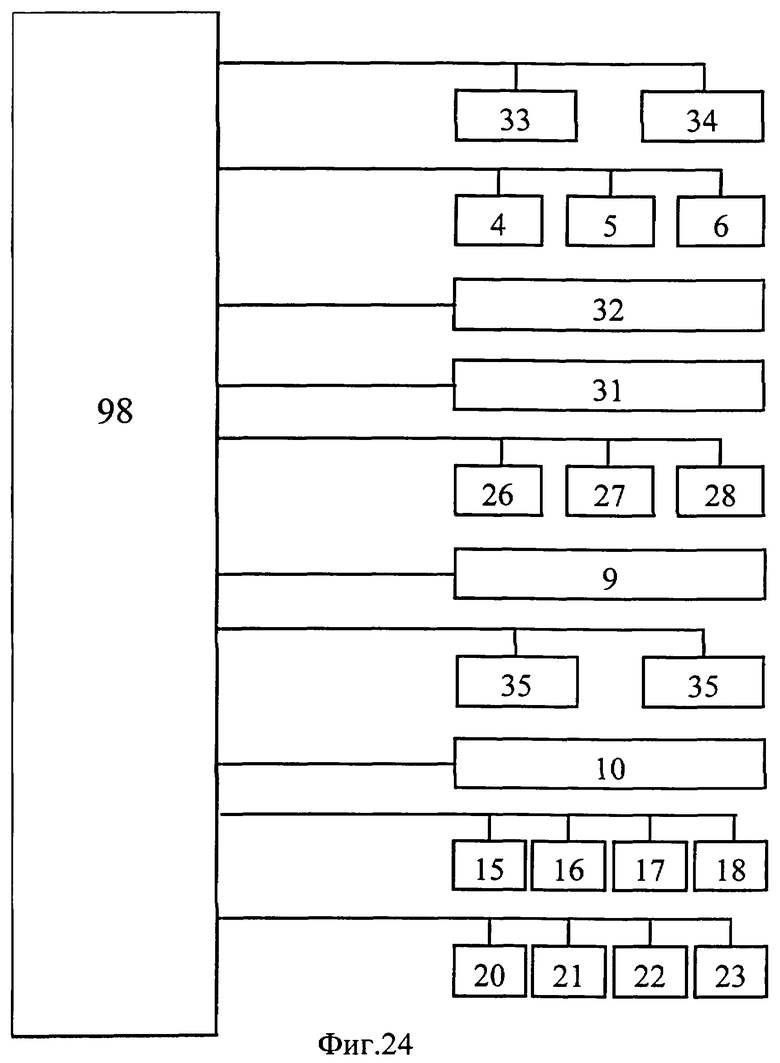
На фиг.24 - блок-схема электромеханического модуля.
Электромеханический модуль запоминающего устройства сверхвысокой (терабитной) емкости содержит первый носитель 1 (фиг.1) с подложкой 2 с запоминающей средой 3, сопряженный посредством первого, второго и третьего линейных приводов 4, 5 и 6 по координате Z, перпендикулярной плоскости подложки 2, с первой платформой 7.
Модуль содержит также второй носитель 8 с матрицей зондов 9 с системой управления их перемещения 10, в плоскости, перпендикулярной плоскости подложки 2, в качестве которой может быть использована система [2], а также системы, аналогичные [3, 4].
Второй носитель 8 закреплен посредством первого, второго, третьего и четвертого упругих элементов 11, 12, 13 и 14 (см. также фиг.2) на первом, втором, третьем и четвертом линейных приводах 15, 16, 17 и 18 в плоскости подложки 2, которые закреплены на второй платформе 19. При этом оси перемещения приводов 15 и 17 перпендикулярны осям перемещения приводов 16 и 18, а оси перемещений приводов 15 и 17, а также 16 и 18 параллельны и смещены относительно друг друга.
Модуль содержит также четыре датчика контроля линейного перемещения 20, 21, 22 и 23 подложки 2 относительно матрицы зондов 9 в плоскости подложки с запоминающей средой. Датчики закреплены посредством кронштейнов 24 по осям перемещения приводов 15-18 на платформе 19 и сопряжены со своими подвижными элементами 25, закрепленными на втором носителе 8.
Датчики 20-23 могут быть, например, емкостными или индуктивными [5, 6]. На платформе 19 закреплены три регулятора положения 26, 27 и 28 первой платформы 7 с первыми шаровыми опорами 29, находящимися во взаимодействии с первыми вставками 30, закрепленными на первой платформе 7. На второй платформе 19 закреплены также захваты 31, выполненные с возможностью фиксации первой платформы 7. На второй платформе 19 установлен блок (блоки) перемещения и фиксации 32 в n - положениях первой платформы 7 относительно второй платформы 19.
Модуль снабжен системой контроля перемещения 33 подложки 2 относительно матрицы зондов 9 в плоскости подложки с запоминающей средой.
В модуль введен также блок активной термокомпенсации рассогласования линейных размеров подложки 2 относительно матрицы зондов 9, содержащий устройство анализа рассогласования 34 и устройство отработки рассогласования, выполненное в виде двух нагревателей 35, сопряженных с подложкой 2 и матрицей зондов 9. (В случае использования подложки 2 и матрицы зондов 9, имеющих значительное отличие по габаритам, возможно использование двух нагревателей различной конструкции).
Три линейных привода 4, 5 и 6 по координате Z, перпендикулярной плоскости подложки 2, могут быть выполнены в виде первого, второго и третьего, например, прямоугольных пьезобиморфов 36 (фиг.3), закрепленных одним концом на первой платформе 7, а другим через первые переходники 37 и пятый, шестой и седьмой упругие элементы 38 (например, плоские пружины) на первом носителе 1. С пьезобиморфами, их подключением и закреплением можно ознакомиться в [7, 8, 9].
Второй вариант выполнения линейных приводов 4, 5 и 6 может содержать три секторных пьезобиморфа 39, 40 и 41 (фиг.4), закрепленных внешней частью на первой платформе 7, а внутренней через вторые переходники 42 и упругие элементы 38 на первом носителе 1.
Пьезобиморф в виде сектора моуяю изготовить из круглого пьезобиморфа [10, 11] путем его разрезки. Подключение секторного пьезобиморфа осуществляют как и пьезобиморфы 36.
Четыре линейных привода 15, 16, 17 и 18 в плоскости подложки 2 могут быть выполнены в виде четвертого, пятого, шестого и седьмого, например, прямоугольных пьезобиморфов 43 (фиг.5), закрепленных одним концом посредством третьих переходников 44 на второй платформе 19, а другим через первые упругие элементы 11, 12, 13 и 14 с четвертыми переходниками 45 на втором носителе 8. В качестве пьезобиморфов могут быть использованы биморфы описанные в [7, 8, 9].
Следует заметить, что каждый линейный привод 15-18 может содержать n - параллельно расположенных пьезобиморфов 43 (фиг.6), посредством пятых переходников 46 и упругих элементов 11, 12, 13 и 14, соединенных с первым носителем 8. При этом пьезобиморфы 43 закреплены на платформе 9 через шестые переходники 47. Следует заметить, что для возможности нормального функционирования приводов 15-18, особенно в диапазоне перемещений более 10 мкм, место соединения пьезобиморфов 43 с переходниками 46 должно быть подвижно в пределах нескольких мкм. Это может быть достигнуто за счет использования, например, клеевого соединения, сохраняющего пластичность после полимеризации, и выполнено в виде герметиков ВГО-1.
Второй вариант выполнения линейных приводов 15, 16, 17 и 18 заключается в том, что они могут быть выполнены в виде круглых пьезобиморфов 48 (фиг.7) [10, 11], закрепленных по периферии в первых держателях 49 на второй платформе 19, а центральными частями посредством седьмых переходников 50 и упругих элементов 11, 12, 13 и 14 на втором носителе 8.
В этом случае вместо использования упругого клеевого шва в местах соединения пьезобиморфа 48 с держателем 49 и переходником 50 целесообразно минимизировать площадь контакта пьезобиморфов 48 с держателями 49 и переходниками 50.
Третий вариант выполнения линейных приводов 15, 16, 17 и 18 заключается в том, что они выполнены в виде пьезопакетов 51 (фиг.8) [12, 13 и 14], закрепленных одним концом во вторых держателях 52 на второй платформе 19, а другим посредством восьмых переходников 53 и упругих элементов 11, 12, 13 и 14 на втором носителе 8.
Упругие элементы 11, 12, 13 и 14 могут быть выполнены О-образными 54 (фиг.9) с отверстием или пазом посередине 55, закрепленные одной половиной на носителе 8, а другой на переходниках 45, 46, 50 или 53.
Регуляторы положения 26, 27 и 28 могут быть выполнены в виде винтовых опор 56 (фиг.10), установленных винтовыми частями 57 на второй платформе 19, а торцами с шаровыми опорами 29, сопряженными с первыми вставками 30 первой платформы 7. Фиксация опор 56 после перемещения может быть осуществлена контргайками (не показаны), клеем и т.п.
Второй вариант выполнения регуляторов положения 26, 27 и 28 по координате Z состоит в том, что регуляторы выполнены в виде пьезотрубок 58 (фиг.11) с осевым перемещением [15], одним концом установленным на второй платформе 19, а другим посредством шаровых опор 29 сопряженным с первыми вставками 30 первой платформы 7.
Третий вариант выполнения регуляторов положения 26, 27 и 28 состоит в том, что регуляторы выполнены в виде пьезотрубок 59 (фиг.12) с перемещением в плоскости XY, перпендикулярной их оси [16], одним концом установленным на второй платформе 19, а другим, посредством шаровых опор 29, сопряженным с первыми вставками 30 первой платформы 7.
Четвертый вариант выполнения регуляторов положения 26, 27 и 28 состоит в том, что регуляторы выполнены в виде пьезотрубок 60 (фиг.13) с перемещением вдоль оси Z и в плоскости XY, перпендикулярной оси [17, 18], одним концом установленными на второй платформе 19, а другим, посредством шаровых опор 29, сопряженных с первыми вставками 30 первой платформы 7.
Вариант выполнения захватов 31 может содержать первый, второй и третий электромагниты 61 (фиг.14), закрепленные на второй платформе 19 и находящиеся во взаимодействии с первыми ферромагнитными вставками 62, установленными на первой платформе 7.
Второй вариант выполнения захватов 31 заключается в том, что четвертый, пятый и шестой электромагниты 63 (фиг.15) расположены внутри пьезотрубок 58, 59 и 60 и находятся во взаимодействии с первыми ферромагнитными вставками 62, установленными на первой платформе 7. (То есть в этих случаях вставки 30 выполнены ферромагнитными). Следует заметить, что выбор материала вставок 30 важен для работоспособности устройства. В этом случае, если ферромагнитный материал вставок, для конкретного исполнения, например, недостаточно тверд, можно использовать двойные вставки, состоящие из ферромагнитного материала и поликора, расположенного в сторону шаговых опор 29.
Устройство перемещения и фиксации 32 в четырех положениях первой платформы 7 относительно второй платформы 19 может быть выполнено в виде седьмого - двенадцатого электромагнитов 64, 65, 66, 67, 68 и 69 (фиг.16), закрепленных на второй платформе 19 и находящихся во взаимодействии со вторыми ферромагнитными вставками 70, установленными на первой платформе 7. На платформе 19 в этом случае могут быть установлены вторые шаровые опоры 71.
Второй вариант выполнения устройства перемещения и фиксации 32 в n - положениях может содержать, например, три шаговых привода 72, сопряженных с винтовыми толкателями 73 и гайками 74. По осям шаговых двигателей 72 [19] установлены пружинные упоры 75, состоящие из штоков 76 и пружин 77, (фиг.17) и закрепленные на второй платформе 19. Толкатели 73 и штоки 76 сопряжены с первой платформой 7 посредством, например, поликоровых вставок 78.
Система контроля перемещения 33 подложки 2 относительно матрицы зондов 9 может содержать три зонда 79, 80 и 81 (фиг.18), расположенных по краям матрицы зондов 9 и три реперных знака 82, 83 и 84 (фиг.19) в запоминающей среде 3 подложки 2, сопряженных с зондами 79, 80 и 81 и представляющих собой три набора первых штрихов, в каждом из которых расположен, как минимум, один штрих, причем штрихи 83 и 84 параллельны друг другу, а штрих 82 им перпендикулярен.
Второй вариант выполнения системы контроля перемещения 33 содержит три лазерных блока интерферометра 85, 86 и 87 (фиг.20), закрепленных на второй платформе 19 и оптически сопряженных со своими подвижными элементами, закрепленными на первой платформе 7 [20, 21, 22].
Первый вариант выполнения блока активной термокомпенсации рассогласования линейных размеров подложки 2 относительно матрицы зондов 9 может содержать устройство анализа рассогласования 34, выполненное в виде двух термопар 88 и 89 (фиг.21) с измерительным блоком 90 (см., например [23]).
Второй вариант выполнения блока активной термокомпенсации рассогласования линейных размеров подложки 2 относительно матрицы зондов 9 может содержать устройство анализа рассогласования 34, состоящие, как минимум, из трех вторых штрихов 91, 92 и 93 (фиг.22), расположенных перпендикулярно трем первым штрихам 82, 83 и 84 и сопряженных с зондами 79, 80 и 81.
Следует заметить, что штрихи 82, 83, 84, 91, 92 и 93 могут быть выполнены с использованием той же технологии, по которой выполняются элементы памяти.
Возможен также упрощенный вариант выполнения блока активной термокомпенсации рассогласования линейных размеров подложки 2 относительно матрицы зондов 9. В этом случае устройство анализа рассогласования 34 может содержать как минимум два параллельных третьих штриха 94 и 95 (фиг.23), а также два перпендикулярных им четвертых штриха 96 и 97. При этом, пары штрихов 94, 96 и 95, 97 сопряжены с зондами 80 и 81.
На блок-схеме электромеханического модуля, изображенной на фиг.24, представлены все возможные варианты подключения устройств к блоку управления 98, который имеет базовую конфигурацию, описанную в [2, 24, 25, 26, 27]. Для возможности функционирования с различными устройствами блок 98 должен иметь дополнительные входы и выходы, а также возможность размещения при необходимости дополнительных узлов в основном корпусе.
Линейные приводы 4, 5, 6, а также 15, 16, 17 и 18, выполненные в виде пьезобиморфов и пьезопакетов управляются, например, напряжениями от 0 до 300 В. (Это определяется величиной напряжения их пробоя).
Датчики 20, 21, 22 и 23 включены в цепь обратной связи с приводами 15, 16, 17 и 18 и позволяют осуществлять корректировку положения матрицы зондов 9 относительно подложки 2 с запоминающей средой 3.
Регуляторы положения 26, 27 и 28 могут быть подключены либо к генератору пилы, либо управляться напряжениями от 0 до 300 В.
Электромагниты 31, а также электромагниты из блока 32 могут управляться напряжениями в зависимости от их конкретного исполнения.
Система контроля перемещения 33 в обоих ее исполнениях (см. ниже) включена в цепь обратной связи с приводами 15, 16, 17 и 18 и позволяет осуществлять корректировку положения матрицы зондов 9 относительно подложки 2 с запоминающей средой 3 после перемещения платформы 7 блоком 32.
Устройство анализа рассогласования 34 в обоих исполнениях (см. ниже) включено в цепь обратной связи с нагревателями 35 и позволяет проводить корректировку размеров подложки 2 и матрицы зондов 9.
Электромеханический модуль работает следующим образом. Закрепляют подложку 2 с запоминающей средой 3 на первом носителе 1, а матрицу зондов 9 - на втором носителе 8. После этого, используя приводы 4, 5 и 6, производят сближение и выравнивание подложки 2 с матрицей зондов 9. Используя систему управления перемещением 10, производят запись (считывание) массива информации каждым зондом матрицы 9 (подробнее см. [27, 28 и 29]). Запись информации на площади подложки 2, соответствующей площади матрицы зондов 9, производят перемещением матрицы зондов по координатам X, Y приводами 15, 16, 17 и 18, контролируя перемещение датчиками 20, 21, 22 и 23. После этого, для записи (считывания) информации по всей площади подложки 2, используя блок 32, производят перемещение платформы 7 по шаровым опорам 29. Контроль положения подложки 2 относительно матрицы зондов 9 производят с помощью системы контроля перемещения 33.
Специфика использования пьезобиморфов 36 (фиг.3), а также секторных пьезобиморфов 39, 40 и 41 (фиг.4) заключается в том, что при подаче напряжения на их обкладки происходит изгиб пьезобиморфов, в результате чего производят перемещение первого носителя 1 с подложкой 2 относительно матрицы зондов 9 по координате Z.
Критерием параллельности подложки 2 и матрицы зондов 9 является оптимальное функционирование крайних зондов матрицы 9.
Функционирование пьезобиморфов 43 (фиг.5) аналогично описанному выше.
Круглые пьезобиморфы 48 (фиг.7) при подаче напряжения на их обкладки принимают форму сферы. При этом происходит перемещение центральных частей относительно периферии.
Перемещение второго носителя 8 (фиг.8) пьезопакетами 51 осуществляется при подаче напряжения на каждый элемент пьезопакета.
Использование в качестве регуляторов положения 26, 27 и 28 винтовых опор 5 (фиг.10) целесообразно после установки подложки 2 и матрицы зондов 9. Контроль зазора между ними возможен с использованием, например, микроскопа (не показан). Существует также вариант, когда, зная толщину подложки 2 и размер по Z матрицы зондов 9, винтовыми опорами 56 один раз устанавливают требуемый размер. После перемещения винтовые опоры 56 можно фиксировать клеем, контргайками (не показаны) и т.п.
Использование пьезотрубок 58 (фиг.11) с осевым перемещением целесообразно в тех случаях, когда необходимо ввести дополнительный Z - привод с возможностью выравнивания плоскости подложки 2 и матрицы зондов 9.
Использование пьезотрубок 59 (фиг.12) с перемещением в плоскости, перпендикулярной их оси, может иметь две функции. В первом случае, при подаче пилообразных напряжений на пьезотрубки, можно производить инерционное перемещение первой платформы 7 относительно второй 19 (см. подробнее [16]). Во втором случае при необходимости можно осуществлять рабочее (при записи и считывании) перемещение подложки 2 относительно матрицы зондов 9.
Использование пьезотрубок 60 (фиг.13) возможно по обоим вариантам, описанным выше.
Режим работы электромагнитов 61 и 63 (фиг.14 и фиг.15) может быть следующим.
При перемещении платформы 7 относительно платформы 19 с помощью магнитов 64-69 (фиг.16) платформа 7 может занимать четыре положения в зависимости от того, какие магниты включены. Магниты 61 и 63 при перемещении могут отключаться, а после перемещения включаться. Возможен также вариант постепенного их включения с целью смягчения удара об опоры 71 платформой 7.
Возможно также отключение магнитов 61 и 63 при перемещении платформы 7 с помощью пьезотрубок 59 и 60 и с использованием пилообразного напряжения. Наоборот, при рабочем перемещении подложки 2 относительно матрицы зондов 9 пьезотрубками 59 и 60 необходимо выключение электромагнитов 61 и 63.
Перемещение и фиксация в четырех положениях первой платформы 7 (фиг.14) относительно второй платформы 19 происходит следующим образом. Включают магниты, например, 64, 65 и 66, выключают магниты 67, 68 и 69, в результате чего происходит перемещение платформы 7. Для уменьшения удара о магниты возможно кратковременное выключение магнитов 64, 65 и 66 с последующим их включением. Перемещение платформы 7 в другое положение происходит аналогично.
Перемещение и фиксация в n - положениях платформы 7 относительно платформы 19, с использованием шаговых приводов 72, 73 и 74 (фиг.17), происходит следующим образом. Включают привода 72, 73 и 74, преобразуют вращательное перемещение в поступательное и перемещают платформу 7 на величину размера матрицы зондов 9. Используя шаговые приводы, имеющие 200 шагов на оборот, и винтовой привод с шагом резьбы 0.2 мм, возможно обеспечить гарантированное совмещение подложки с матрицей зондов в зону 10 мкм.
Используя систему контроля перемещения, содержащую три зонда 79, 80 и 81 (фиг.18, фиг.19) и три штриха 82, 83 и 84, можно осуществлять контроль рассовмещения подложки 2 относительно матрицы зондов 9. Это происходит следующим образом. Проводят двухкоординатное сканирование матрицы зондов 9 подложки 2. При этом зонды 79, 80 и 81 при перпендикулярном пересечении штрихов 82, 83 и 84 формируют от них рабочие сигналы. Временной промежуток между сигналами от штрихов 83 и 84 характеризует разворот подложки 2 относительно матрицы зондов 9. А положение сигналов от штриха 82 и, например, штриха 83 относительно поля сканирования зондов 79 и 80 дает информацию о рассогласовании подложки 2 относительно матрицы зондов 9 соответственно по координатам Х и Y (см. подробнее [30, 31 и 32]).
Используя лазерные интерферометры 85, 86 и 87 (фиг.20), можно проводить слежение за перемещением подложки 2 в любой точке пространства по координатам X, Y.
Блок активной термокомпенсации рассогласования линейных размеров подложки и матрицы зондов на термопарах (фиг.21) работает следующим образом. Посредством термопар 88 и 89 измеряют температуры подложки 2 и матрицы зондов 9. После этого проводят выравнивание температур, используя нагреватели 35 (см. подробнее [16, 33, 34, 35]). Анализ рассогласования линейных размеров подложки 2 и матрицы зондов 9 с использованием реперных знаков (фиг.22) происходит путем измерения, например, временных промежутков между считыванием штрихов 92 и 93, а также штрихов 91 и 83 с последующим их переводом в величину рассогласования размеров [31, 32].
В упрощенном варианте (фиг.23) анализ рассогласования линейных размеров подложки 2 и матрицы зондов 9 происходит следующим образом. Сканируют зондами 80 и 81 перпендикулярно штрихам 96 и 97. Измеряют рассогласование их положения относительно номинального значения (см. выше). Включают нагреватели 35 и компенсируют это рассогласование. Анализ рассовмещения подложки 2 относительно матрицы зондов 9 в этом случае по трем координатам осуществляют, используя зонды 80 и 81. При этом реперный знак, состоящий из штрихов 94 и 96, сканируется по двум координатам, а штрих 95 - по одной координате, ему перпендикулярной. Этот вариант можно использовать в том случае, когда матрица зондов состоит из зондов, расположенных по одной координате. При этом подвижка с помощью блока 32 более целесообразна по координате, перпендикулярной линии расположения зондов.
В настоящее время получены матрицы зондов с расстоянием между ними 100 мкм, при этом количество зондов на матрице может быть 32×32=1024 штук [2]. Размер матрицы зондов при этом составит величину 3.2×3.2 мм2.
Современная технология позволяет формировать наноэлементы до 10 нм в диаметре [36, 37, 38, 39]. Соответственно, один зонд при сканировании по площади 100×100 мкм2 (определяется расстояние между зондами) сможет формировать 108 элементов, а матрица зондов 9 при этом сформирует 1011 элементов. Таким образом, для получения терабитной емкости достаточно десяти мультипликаций матрицы зондов 9 на подложке 2 с суммарной площадью ~100 мм2.
При размере элемента 30 нм (см., например, [40]) площадь запоминающей среды терабитного ЗУ составит величину порядка 30×30 мм2. В обоих случаях указанную емкость можно получить, используя шаговые приводы 72, 73 и 74.
В случае использования матрицы зондов 50×50 и размера элемента 10 нм можно получить терабитную емкость, используя четырехпозиционное устройство перемещения на электромагнитах. (Матрицы с количеством зондов 106 предложены в [1]).
Следует заметить, что площадь запоминающей среды при размерах элементов порядка 10 нм целесообразно выбирать порядка нескольких квадратных сантиметров. Это определяется, с одной стороны, возможностью поддержания температуры по всей площади подложки и матрицы зондов. С другой стороны, чем меньше размеры запоминающей среды, тем меньше размеры электромеханического модуля. А это важно для использования ЗУ в бортовой аппаратуре, вакуумном исполнении и т.п.
Предложенное решение помимо указанных принципов записи - считывания элементов памяти может использовать решения, описанные в следующем источнике [41].
Отличительные признаки предложенного устройства обеспечивают следующий технический результат.
Введение третьего и четвертого линейных приводов по взаимно перпендикулярным направлениям в плоскости подложки, а также четырех упругих элементов позволяет одновременно с перемещением по координатам X, Y осуществлять разворот в плоскости подложки с запоминающей средой относительно матрицы зондов. Это позволяет с большей надежностью производить совмещение матрицы зондов с запоминающей средой, использовать элемент памяти меньших размеров, увеличивать плотность записи и, соответственно, емкость памяти.
Использование четырех датчиков контроля линейного перемещения, закрепленных на второй платформе и сопряженных со вторым носителем, позволяет повысить надежность совмещения матрицы зондов с запоминающей средой и увеличить плотность записи и емкость памяти.
Применение трех регуляторов положения первой платформы позволяет проводить предварительное выравнивание плоскости подложки с запоминающей средой относительно матрицы зондов, что упрощает финишный процесс выравнивания, повышает надежность записи и считывания элементов памяти, ее плотность и емкость.
Введение захватов первой платформы увеличивает надежность ее фиксации в процессе записи и считывания элементов памяти, что также позволяет формировать элементы с меньшими размерами и повышает плотность и емкость памяти.
Использование устройства перемещения и фиксации в п - положениях первой платформы относительно второй и системы контроля перемещения подложки относительно матрицы зондов в плоскости подложки с запоминающей средой увеличивает площадь записи и считывания и, соответственно, емкость памяти.
Использование в качестве трех линейных приводов по координате, перпендикулярной плоскости подложки первого, второго и третьего пьезобиморфов, уменьшает габариты модуля, что приводит к увеличению его резонансных частот, повышению надежности совмещения зондов и элементов и, в конечном итоге, приводит к увеличению плотности и емкости памяти.
Применение пятого, шестого и седьмого упругих элементов позволяет уменьшить изгибные напряжения пьезобиморфов и первого носителя, что улучшает надежность работы устройства, и также повышает плотность и емкость памяти.
Выполнение первого, второго и третьего пьезобиморфов в виде секторов одновременно с уменьшением габаритов повышает жесткость по координате Z, что улучшает резонансные характеристики системы, позволяет формировать элементы меньшего размера и повышает плотность и емкость памяти.
Использование в качестве первого, второго, третьего и четвертого линейных приводов в плоскости подложки пьезобиморфов уменьшает габариты системы, позволяет осуществлять развертку на полях более 100 мкм, что немаловажно для увеличения емкости памяти.
Использование первых упругих элементов, с одной стороны, уменьшает изгибные напряжения на пьезобиморфы, с другой, - позволяет совмещать роль толкателя с ролью шарнира. Это повышает надежность работы устройства.
Применение n - параллельно расположенных пьезобиморфов увеличивает жесткость привода и надежность его работы.
Выполнение линейных приводов в плоскости подложки в виде круглых пьезобиморфов или пьезопакетов увеличивает жесткость системы и, как уже отмечалось, плотность и емкость памяти.
Выполнение первого, второго, третьего и четвертого упругих элементов О-образными уменьшает нефункциональные перемещения подложки относительно матрицы зондов по координате Z, увеличивает надежность записи и считывания элементов памяти, плотность записи, а соответственно, и емкость памяти.
Применение в качестве датчиков контроля емкостных и индуктивных датчиков снижает погрешность перемещения матрицы зондов относительно подложки и повышает плотность и емкость памяти.
Выполнение регуляторов положения первой платформы в виде винтовых опор упрощает эксплуатацию устройства и за счет возможности подбора материала опор с оптимальными температурными коэффициентами линейного расширения позволяет уменьшить термодрейф, что приводит к возможности уменьшения размеров элементов памяти, повышает плотность и емкость памяти.
Выполнение регуляторов положения первой платформы в виде пьезотрубок с осевым перемещением увеличивает возможность выравнивания плоскостей подложки с запоминающей средой и матрицы зондов. Например, функцию подвода можно осуществлять пьезотрубками, а функцию оперативного выравнивания - тремя линейными приводами по координате, перпендикулярной плоскости подложки, выполненными в виде пьезобиморфов. Это позволит применять биморфы линейных размеров, повысит их жесткость, резонансные частоты, точность перемещения и, в конечном итоге, плотность и емкость памяти.
Выполнение регуляторов положения в виде пьезотрубок с перемещением в плоскости, перпендикулярной их оси приводит к дополнительной возможности перемещения первой платформы относительно второй платформы. Это может привести к повышению точности перемещения подложки относительно матрицы зондов. Например, возложив функцию предварительного перемещения на четыре линейных привода в плоскости подложки. При этом финишное перемещение в малом диапазоне ~100 нм можно производить пьезотрубками. Это повысит, соответственно, плотность и емкость памяти.
Выполнение регуляторов положения в виде пьезотрубок с перемещением вдоль оси и в плоскости, перпендикулярной оси позволяет объединить преимущества двух предыдущих пунктов.
Размещение четвертого, пятого и шестого электромагнитов внутри пьезотрубок минимизирует изгибные напряжения платформы, уменьшает размеры дрейфа и, в конечном итоге, повышает плотность и емкость памяти.
Выполнение устройства перемещения и фиксации в четырех положениях первой платформы относительно второй платформы в виде шести электромагнитов позволяет в четыре раза увеличить емкость памяти.
Выполнение устройства перемещения и фиксации первой платформы относительно второй в n - положениях в виде трех шаговых приводов и пружинных упоров увеличивает в широком диапазоне (более четырех раз) емкость памяти.
Введение системы контроля перемещения подложки относительно матрицы зондов, выполненной в виде трех зондов, позволяет после перемещения подложки относительно матрицы зондов проводить корректировку их взаимного положения, повышает точность совмещения матрицы зондов и подложки, а также плотность и емкости памяти.
Выполнение системы контроля перемещения подложки относительно матрицы зондов в виде лазерных интерферометров расширяет диапазон анализа рассовмещения, что может привести к существенному увеличению емкости памяти.
Использование в блоке активной термокомпенсации рассогласования линейных размеров подложки относительно матрицы зондов устройства анализа рассогласования, выполненного в виде двух термопар с измерительным блоком, соединенных с подложкой и матрицей зондов, а также устройства отработки рассогласования в виде двух нагревателей позволяет повысить надежность работы устройства, а также за счет возможного уменьшения размеров элементов повысить плотность и емкость памяти.
Использование в устройстве анализа рассогласования трех вторых штрихов, расположенных перпендикулярно первым штрихам и сопряженных с зондами, расположенными по краям матрицы зондов, позволяет непосредственно измерять температурное рассогласование линейных размеров подложки и матрицы зондов, что повышает точность термокомпенсации и в конечном итоге плотность и емкость памяти.
ЛИТЕРАТУРА
1. Р.Vettiger, M.Despont, U.Drechsler,  , W.Haberle, M.I.Lutwyche, H.E.Rothuizen, R.Stutz, R.Widmer, G.K.Binnig. The "Millipede" - More than one thousand tips for future AFM data storage. IBM J. Res. Dev. V.44. No.3. 2000. P.323-340.
, W.Haberle, M.I.Lutwyche, H.E.Rothuizen, R.Stutz, R.Widmer, G.K.Binnig. The "Millipede" - More than one thousand tips for future AFM data storage. IBM J. Res. Dev. V.44. No.3. 2000. P.323-340.
2. Патент ЕР 1130578А2, G 11 B 5/00, 2001.
3. S.A.Mffler, K.L.Turner, N.C.MacDonald. Microelectromechanical scanning probe instruments for array architectires. Rev. ScL Instrum. 1997. V.68. NIL 4155-4162.
4. Sensors & Actuators A, 1997, 60.
5. Ж.Аш, Датчики измерительных систем., M.: Мир, 1992.
6. Патент США US 4883959, G 01 N 23/00, 1989.
7. Патент США US 4533849, Н 01 L 41/08, 1985.
8. Заявка W087/06394, H 01 L 41/04, 1987.
9. А.с. СССР 1550457, G 02 B 26/04, 1990.
10. А.с. СССР №1453475, H 01 J 37/26, 1989.
11. Каталог Physic Instrument, 5.43.
12. Патент ЕР 0319038 В1, Н 01 L 41/02, 1988.
13. Патент №2695521, H 02 N 2/00, 1992.
14. Патент США US 5656849, Н 01 L 41/08, 1985.
15.Пьезоприводы ППУ - 9 - ППУ14, V/0 Electroningtorg.
16. Патент РФ №2152103, Н 01 J 37/28, 2000.
17. Патент США US 5051646, Н 01 L 41/08, 1991.
18.Патент США US 5574278, H 01 J 37/26, 1996.
19. Каталог Mitsumi Electronic CO., LTD, Mini - Motors, 1990.
20. Патент США US 5512808, B 26 D 3/06, 1990.
21. А.С. СССР 1578457, G 01 B 9/02, 1990.
22. Патент ЕР 0376045, H 01 L 21/30, 1989.
23. Патент РФ №2169440, Н 05 В 3/06, 2001.
24. Патент ЕР 0376045, H 01 L 21/30, 1989.
25. Заявка Японии №6 - 251436, G 11 B 9/00, 1994.
26. Зондовая микроскопия для биологии и медицины. В.А.Быков и др. Сенсорные системы т.12, №1, 1998 г., с.99-121.
27. Патент США US 5504338, H 01 J 37/26, 1996.
28. Патент США US 5646882, G 11 C 11/06, 1997.
29. B.D. Terris, R.C. Barrett. Data storage in NOS: lifetime and carrier-tonoise measurements. IEE Tr. EL Dev. 1995. V.42. N.5. Р.944-949.
30. Патент США US 5508527, G 01 J 1/00, 1996.
31. А. С. СССР №1354978, G 03 F 9/00, 1987.
32. А. С. СССР №1385843, H 01 L 21/68, 1987.
33. Патент США US 6238830, G 03 F 9/00, 2001.
34. Патент США US 5654546, H 01 J 37/26, 1995.
35. Патент США US 5821545, H 01 J 37/20, 1998.
36. http://www.research.ibm.com/resources/magazine/l999/number_3/ frontier399.html
37. S.Sun, С.В.Murray, D.Weller, L.Folks, A.Moser. Monodisperse FePt Nanoparticles and Ferromagnetic FePt Nanocrystal Superlattices. Science. V.287. N5460. 2000: Р.1989-1992. http://www. sciencemag.org/content/vol287/issue5460/
38. K.Takimoto, R.Kuroda, S.Shido, S.Yasuda, H.Matsuda, K.Eguchi, T.Nakagiri. Writing and reading bit arrays for information storage using conductance change of a Langmuir-Blodgett film induced by scanning tunneling microscopy. J. Vac. Sci. Techn. V.15. N4. P.1429-1431.
39. E.Dubois, J. - L.Bubbendor. Nanometer scale lithography on silicon, titanium and PMMA resist using scanning probe microscopy. Solid-State Electronics. 1999. V.43. P.1085-1089.
40. H.Kado, T.Tohda. Nanometer-scale recording on chalcogenide films with an atomic force microscope. Appl. Phys. Lett. 1995. V.66. N 22. Р.2961-2962.
41. V.Bykov. Langmuir - Blodgett films and nanotechnology Biosensors & Bioelectronics V.11, №9 p.923-932.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОПОЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2001 |
|
RU2210730C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| ДЕЛИТЕЛЬНАЯ МАШИНА МАЯТНИКОВОГО ТИПА ДЛЯ ФОРМИРОВАНИЯ ШТРИХОВЫХ СТРУКТУР НА ВОГНУТЫХ ПОВЕРХНОСТЯХ | 2019 |
|
RU2725321C1 |
| ДЕЛИТЕЛЬНАЯ МАШИНА МАЯТНИКОВОГО ТИПА ДЛЯ ИЗГОТОВЛЕНИЯ ШТРИХОВЫХ СТРУКТУР НА ВОГНУТЫХ ПОВЕРХНОСТЯХ | 2019 |
|
RU2725324C1 |
Изобретение относится к накоплению информации. Электромеханический модуль запоминающего устройства сверхвысокой емкости содержит носитель с запоминающей средой, носитель с матрицей зондов с системой управления их перемещением, линейные приводы и блок управления. Особенность модуля состоит в том, что в него введены дополнительные линейные приводы, которые сопряжены посредством соответствующих упругих элементов со вторым носителем, причем параллельные оси их перемещения смещены относительно друг друга. Модуль содержит датчики контроля линейного перемещения, регуляторы положения, устройство перемещения и фиксации, систему контроля перемещения запоминающей среды относительно матрицы зондов и блок активной термокомпенсации рассогласования линейных размеров подложки относительно матрицы зондов. Линейные приводы могут быть выполнены в виде пьезобиморфов. Предложенное техническое решение позволяет повысить плотность записи и емкость запоминающего устройства. 20 з.п. ф-лы, 24 ил.
| VETTIGER P | |||
| at al | |||
| THE "MILLIPEDE" - MORE THAN ONE THOUSAND TIPS FOR FUTURE AFM DATA STORAGE | |||
| IBM J | |||
| RES | |||
| DEV | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| TAKIMOTO K | |||
| at al | |||
| WRITING AND READING BIT ARRAYS FOR INFORMATION STORAGE USING CONDUCTANCE CHANGE OF A LANGMUIR-BLODGETT FILM INDUCED BY SCANNING TUNNELING MICROSCOPY, J | |||
| VAC | |||
| SCI | |||
| TECHN | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| KADO H., TOHDA T., NANOMETER-SCALE RECORDING ON CHALCOGENIDE FILMS WITH AN ATOMIC FORCE MICROSCOPE | |||
| APPL | |||
| PHYS | |||
| LETT | |||
| Топка с качающимися колосниковыми элементами | 1921 |
|
SU1995A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |

