Изобретение относится к авиационной технике, а именно к беспилотным летательным аппаратам, имеющим назначение, идентичное пилотируемым типа самолет.
Известен беспилотный летательный аппарат (патент US 5372337, 13.12. 1994 г. [1]). Предлагаемый летательный аппарат имеет силовую установку с поворотными соплами для обеспечения дополнительной степени свободы и нормальную аэродинамическую схему, что не позволяет достичь высокой маневренности и многорежимности.
Известны беспилотные летательные аппараты, используемые в военных целях [2,3]. Однако все они являются однорежимными и маломаневренными летательными аппаратами, не оснащены шасси для взлета и посадки и, в основном, являются одноразовыми. Все это не позволяет применять их с той же эффективностью, что и пилотируемые летательные аппараты.
Задачей изобретения является разработка беспилотного многорежимного высокоманевренного летательного аппарата, позволяющего достичь следующий технический результат: заменить пилотируемый летательный аппарат в условиях применения сопряженных с риском для человеческой жизни.
Сущностью изобретения является беспилотный многорежимный высокоманевренный летательный аппарат, содержащий корпус, шасси, несущие плоскости, расположенные симметрично в плоскости, перпендикулярной к строительной оси аппарата, механизацию несущих плоскостей для обеспечения взлета, посадки и маневрирования, оперение, силовую установку, имеющую по крайней мере один воздушно-реактивный двигатель с отклонением вектора тяги и воздухозаборник, систему управления и бортовое оборудование, предназначенное для самостоятельного взлета, навигации в автономном полете, возврат на аэродром базирования и самостоятельную посадку.
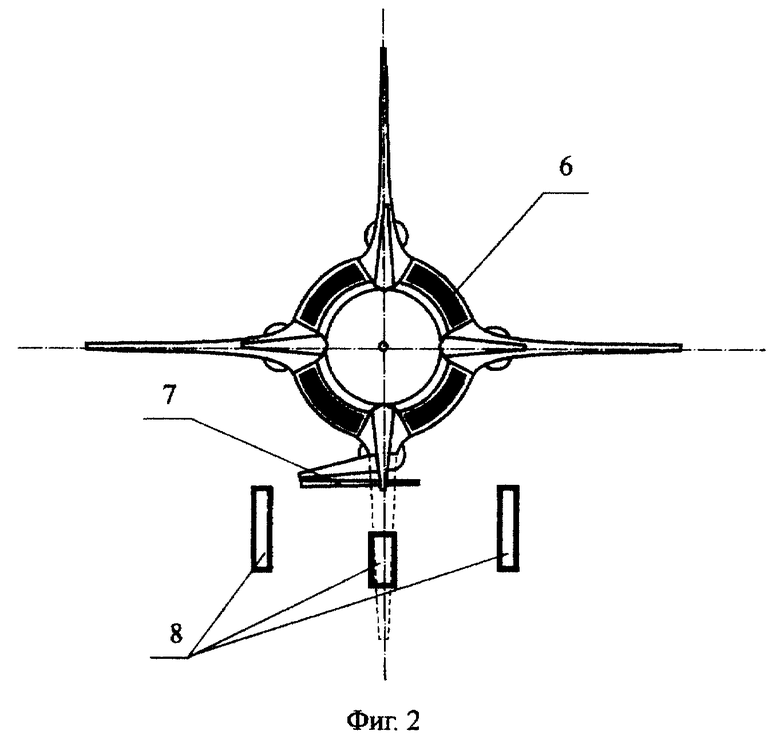
Указанный технический результат достигается тем, что его корпус выполнен по интегральной схеме, оперение располагается впереди несущих плоскостей, количество несущих плоскостей и их размещение обеспечивают аэродинамическую симметрию в плоскости YOZ, перпендикулярной к строительной оси аппарата, механизация его несущих плоскостей обеспечивает взлет и посадку с применением убирающегося в корпус шасси, маневрирование и устойчивый полет на больших углах атаки, в его силовой установке применяется один или несколько воздушно-реактивных двигателей с отклонением вектора тяги, а ее воздухозаборник выполнен кольцевым с расположением плоскости входа вблизи центра масс летательного аппарата, бортовое оборудование, устанавливаемое на аппарат, обеспечивает самостоятельный взлет, навигацию в автономном полете, выбор профиля и программы полета, поиск, обнаружение и идентификацию цели, ее сопровождение и, с учетом приоритетности, перенацеливание, а также возврат на аэродром базирования и самостоятельную посадку.
Перечень фигур:
фиг.1 - компоновка аппарата;
фиг.2 - вид спереди.
Корпус 1 (фиг.1) выполнен по интегральной схеме и обеспечивает плавное сочленение с несущими плоскостями 2 и оперением 3. Для обеспечения статической неустойчивости оперение 3 располагается впереди несущих плоскостей 2. В хвостовой части упомянутого корпуса 1 размещается силовая установка 4, включающая один или несколько воздушно-реактивных двигателей (ВРД) с отклонением вектора тяги. ВРД оканчивается многофункциональным выходным устройством 5, обеспечивающим отклонение вектора скорости истекающих газов в заданном направлении. Воздухозаборник 6 (фиг.2) упомянутой силовой установки 4 выполнен дозвуковым с механизацией, обеспечивающей необходимый расход воздуха и устойчивую работу турбокомпрессорной части силовой установки при любых эволюциях аппарата и во всем диапазоне эксплуатационных скоростей полета. Упомянутый беспилотный летательный аппарат оснащен убирающимся в корпус шасси 8. Для перемещения аппарата по поверхности аэродрома при рулении, взлете и посадке, выпуска и уборки шасси 8, по крайней мере, одна из несущих плоскостей выполнена складывающейся 7. Передние кромки несущих поверхностей 9 и рулевые поверхности 10 выполнены отклоняемыми, что обеспечивает дифференциальные изменения кривизны профилей несущих поверхностей.
Упомянутая компоновка беспилотного летательного аппарата обеспечивает аэродинамическую симметрию в плоскости, перпендикулярной строительной оси, что, в совокупности со статической неустойчивостью и отсутствием биологического объекта (пилота), позволяет достичь более высокого уровня маневренности по сравнению с пилотируемым летательным аппаратом.
Применение в силовой установке ВРД с отклонением вектора тяги вместе с дифференциально изменяемой кривизной профилей несущих поверхностей дает возможность обеспечить устойчивость и управляемость аппарата при полете на больших углах атаки и околонулевых скоростях полета.
Так как аэродинамические силы и моменты зависят от скорости полета, то система управления аппарата реализует одновременно аэродинамическое и тягово-моментное управление движением аппарата и угловым положением его строительной оси в пространстве. Под тягово-моментным управлением в данном случае понимается одновременное управление модулем силы тяги силовой установки и углом отклонения выходного устройства для создания требуемого управляющего момента с целью изменения или сохранения углового положения строительной оси упомянутого аппарата в пространстве при реализации его заданного движения. Соотношение между управляющими сигналами в контуры аэродинамического и тягово-моментного управления (передаточное отношение) определяется в зависимости от угла атаки и действующего скоростного напора.
Бортовое оборудование, устанавливаемое на аппарат, обеспечивает самостоятельный взлет, навигацию в автономном полете, выбор профиля и программы полета, поиск, обнаружение и идентификацию цели, ее сопровождение и, с учетом приоритетности, перенацеливание, а также возврат на аэродром базирования и самостоятельную посадку. Определение профиля и программы полета осуществляется исходя из характерного профиля земной поверхности и условий полета. Перенацеливание осуществляется в автоматическом режиме или дистанционно с указанием координат и типа цели. Прекращение полета, возврат на аэродром базирования и выбор способа посадки осуществляется автоматически, но с возможностью коррекции вырабатываемого бортовым оборудованием решения через дистанционный пункт управления с учетом технического состояния аппарата.
Источники информации
1. Unmanned aerial aircraft having a single engine with dual jet exhausts. US патент 5372337 кл. В 64 С 15/12, В 64 С 29/04, В 64 D 27/00 от 13 декабря 1994 г.
2. Военный энциклопедический словарь. - М: Воениздат, 1983.-863 с. с ил.
3. Ю. А. Зуенко, С.Е. Коростылев. Боевые самолеты России. - М.: Элакос, 1994.-192 с. с ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| РАЗГОННЫЙ САМОЛЕТ-НОСИТЕЛЬ (ВАРИАНТЫ) | 2019 |
|
RU2715816C1 |
| САМОЛЕТ - ЭКРАНОПЛАН МНОГОРЕЖИМНЫЙ | 2019 |
|
RU2719993C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ И НЕСУЩАЯ ПЛАТФОРМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ГОРИЗОНТАЛЬНОГО ПОЛЁТА С ВЕРТИКАЛЬНЫМ ВЗЛЁТОМ И ПОСАДКОЙ | 2018 |
|
RU2693362C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| УДАРНО-БОЕВОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2778159C1 |
| МНОГОЭЛЕМЕНТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2769000C1 |
Изобретение относится к авиационной технике. Аппарат содержит фюзеляж, силовую установку, оперение, несущие плоскости, шасси, систему управления и бортовое оборудование. Фюзеляж выполнен по интегральной схеме, оперение расположено впереди несущих плоскостей, количество несущих плоскостей и их размещение обеспечивают аэродинамическую симметрию в плоскости YOZ, перпендикулярной к строительной оси аппарата. Механизация несущих плоскостей обеспечивает взлет и посадку с применением убирающегося в корпус шасси и устойчивый полет на больших углах атаки. Воздухозаборник выполнен кольцевым с расположением плоскости входа вблизи центра масс летательного аппарата. Изобретение направлено на расширение функциональных возможностей путем повышения маневренности. 4 з.п. ф-лы, 2 ил.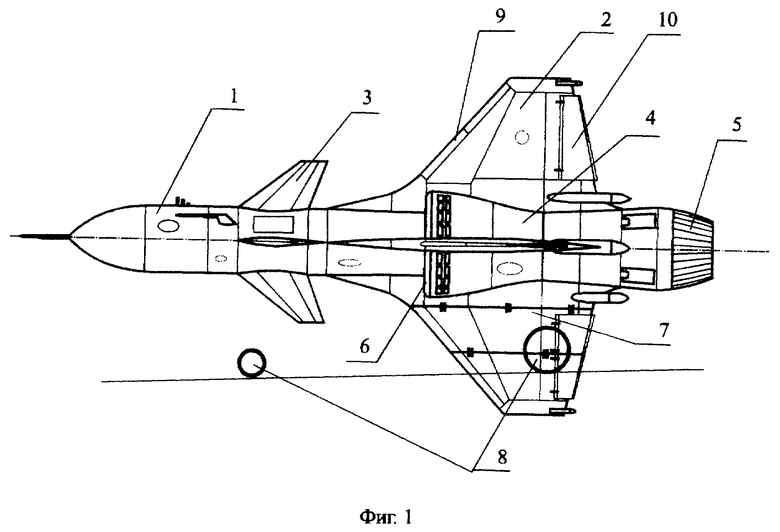
| US 5372337 A, 13.12.1994 | |||
| US 4259658 A, 31.03.1981 | |||
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ПЕНОГОННОГО СРЕДСТВА ДЛЯ ТУШЕНИЯ ПОЖАРОВ И АППАРАТ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 1926 |
|
SU4109A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |
| АВТОМАТИЧЕСКОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 0 |
|
SU285463A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

